Magic Formula轮胎模型
- 格式:ppt
- 大小:1.72 MB
- 文档页数:20
第34卷㊀第6期2019年12月北京信息科技大学学报JournalofBeijingInformationScience&TechnologyUniversityVol.34㊀No.6Dec.2019文章编号:1674-6864(2019)06-0076-06DOI:10 16508/j.cnki.11-5866/n.2019 06 014基于PAC2002魔术公式的轮胎动力学特性分析尚㊀强ꎬ王国权(北京信息科技大学机电工程学院ꎬ北京100192)摘㊀㊀㊀要:为了满足汽车动力学整车仿真的研究需要ꎬ基于Matlab/Simulinkꎬ用PAC2002魔术公式建立某轮胎动力学的仿真模型ꎬ对车辆稳态行驶时在轮胎纯驱动(制动)㊁纯转弯㊁驱动(制动)和转弯联合等工况下ꎬ分别进行纵向滑移率㊁侧偏角㊁垂直载荷等指标对纵向力㊁侧向力和回正力矩的仿真分析ꎮ仿真结果表明ꎬ基于PAC2002魔术公式的轮胎动力学模型能够比较准确地模拟出轮胎的动力学特性ꎮ关㊀键㊀词:PAC2002魔术公式ꎻ轮胎模型ꎻ纵向滑移率ꎻ侧偏角中图分类号:U461ꎻU463㊀㊀㊀文献标志码:ATiredynamicsanalysisbasedonPAC2002Magic ̄FormulaSHANGQiangꎬWANGGuoquan(MechanicalElectricalEnginneeringSchoolꎬBeijingInformationScience&TechnologyUniversityꎬBeijing100192ꎬChina)Abstract:InordertomeettheneedtoanalyzethevehicledynamicsꎬbasedontheMatlab/SimulinksoftwareꎬatiredynamicsmodelisestablishedaccordingtothePAC2002Magic ̄Formulatiremodel.Thenthemodelissolvedunderthesteady ̄stateconditionssuchasvehiclepurebrakingꎬdrivingꎬpurecorneringꎬbrakingꎬdrivingandcornering.Thetirelongitudinalforceꎬthelateralforceꎬandthealigningmomentarecaculatedindifferentslipratioꎬslipangleandtheverticalload.ItisshownthatthetiredynamicmodelbasedonPAC2002formulaeffectivelysimulatesitsdynamiccharacteristics.Keywords:PAC2002magic ̄formulaꎻtiremodelꎻlongitudinalslipratioꎻslipangle收稿日期:2018 ̄06 ̄16第一作者简介:尚㊀强ꎬ男ꎬ硕士研究生ꎻ通讯作者:王国权ꎬ男ꎬ博士ꎬ教授ꎮ0㊀引言轮胎动力学的研究先后经历了起始阶段㊁发展阶段和相对成熟阶段ꎮ汽车轮胎动力学的研究起源于对飞机轮胎的研究ꎮ20世纪20年代末至30年代初ꎬ美国空军建成了起落架系统卓越中心(LGSCE)ꎬ开发了航空轮胎六分力测试设备ꎮ此后ꎬ美国㊁德国㊁荷兰相继开发了Fiala㊁UA及MagicFormula(MF)等轮胎模型ꎬ在模型精度提高的同时ꎬ适用范围也从单一工况扩展至侧偏㊁纵滑等四维输入的复合工况[1]ꎮ轮胎模型从稳态到非稳态㊁从线性到非线性模型已经相当丰富ꎮ我国学者对轮胎动力学的研究始于20世纪60年代ꎬ起因是国产红旗轿车出现了高速稳定性的问题ꎮ1984年长春汽车研究所开发了QY7329轮胎试验台ꎬ改变了我国无法进行轮胎动力学测试的状况[2]ꎮ从此我国轮胎动力学的研究开始快速推进ꎮ郭孔辉院士在理论分析和试验研究基础上所提出的幂指数统一轮胎模型是代表性的成果ꎬ可用于轮胎的稳态侧偏㊁纵滑以及纵滑侧偏联合工况ꎬ并且可预测轮胎的稳定特性ꎮ该模型通过获得有效的滑移率ꎬ也可进行非稳态工况下的轮胎纵向力㊁侧偏力和回正力矩的计算[3]ꎮ国外ꎬ荷兰Delft工业大学提出了SWIFT轮胎模型ꎬ它由刚性圈理论和魔术公式[4]综合而成ꎬ在考虑侧向力和回正力矩时ꎬ采用魔术公式ꎻ在考虑纵向力和垂直力时ꎬ采用刚性圈理论ꎮSWIFT轮胎模型采用了胎体建模与接地区域分离的建模方法ꎬ可精确地描述小波长㊁大滑移时的轮胎特性ꎬ因而可计算从瞬态到稳态连续变化的轮胎动力学行为ꎮ此第6期尚㊀强等:基于PAC2002魔术公式的轮胎动力学特性分析㊀外ꎬ该模型也考虑到了在不同路面条件下行驶的情况ꎬ通过对模型的进一步细化ꎬ还可用来描述车轮外倾以及转弯纵滑联合工况下的轮胎特性[3]ꎮ目前ꎬ应用最广泛的是由H.BPacejka教授提出的轮胎经验模型 魔术公式 轮胎模型ꎬ它是通过对大量的轮胎动力特性的实验数据进行回归分析ꎬ以三角函数组合的形式来拟合实验数据ꎬ得出的一套形式相同但可同时表达纵向力㊁侧向力和回正力矩的轮胎模型[4]ꎮPacejka 89轮胎模型ꎬ由H.BPacejka㊁E.Bakker和L.Lidner教授在发表的论文中所提出[5]ꎻPacejka 94轮胎模型由H.BPacejka教授在1993年第一届国际车辆动力学分析轮胎模型座谈会上提出[6]ꎮ而PAC2002模型则由MSCSoftware公司根据Pacejka 89轮胎模型和Pacejka 94轮胎模型结合车辆动力学联合开发出来ꎬ该模型包含了已发布的Pacejka 89㊁Pacejka 94轮胎模型和车辆动力学的最新进展ꎮ相对于两个Pacejka轮胎模型ꎬPAC2002轮胎模型在参数表达式上有较大的变化ꎬ拟合精度有了更进一步的提高[7 ̄8]ꎮ本文以某品牌乘用车轮胎为研究对象ꎬ使用Matlab/Simulink软件建立了不同工况下轮胎的PAC2002轮胎模型ꎬ仿真绘制了轮胎的纵向滑移率㊁侧偏角㊁外倾角和垂直载荷对纵向力㊁侧向力以及回正力矩的关系曲线图ꎬ进而分析曲线的变化趋势ꎬ为汽车极限安全行驶性能评估提供了理论依据ꎮ1㊀轮胎模型的建立PAC2002轮胎模型是以 魔术公式 和车辆动力学为基础联合开发出来的ꎬ它用一套形式相同的数学公式描述稳态条件下轮胎与道路之间的相互作用力ꎮ无论对侧向力㊁纵向力和回正力矩ꎬ其拟合精度都相对比较高ꎬ公式统一性强ꎬ编程简单ꎬ需要拟合的参数较少ꎬ且各个参数都有明确的物理意义ꎮPAC2002轮胎模型采用SAE标准轮胎运动坐标系ꎬ轮胎力的计算输入和输出变量关系如图1所示ꎮ用魔术公式轮胎模型对轮胎建模时将轮胎的稳态工况分为以下3类ꎮ纯驱动(制动)工况:制动或驱动轮胎纵向滑动而不转弯ꎮ图1㊀魔术公式轮胎模型的输入和输出变量纯转弯工况:使用自由滚动轮胎半径转弯ꎮ㊀㊀纯驱动(制动)和纯转弯组合工况:同时转弯和纵向滑动ꎮ魔术公式如下:Yx()=DsinCtan-1Bx{[-EBx-(tan-1Bx())}](1)式中:Yx()为轮胎的侧向力㊁纵向力或者回正力矩ꎻx为轮胎的侧偏角或者纵向滑移率ꎻD为确定曲线特征的峰值ꎬ称为峰值因子ꎻC为决定正弦使用的部分ꎬ主要影响正弦的形状曲线ꎬ称为形状因子ꎻB为拉伸曲线因子ꎬ称为刚度系数ꎻE为修改曲线峰值周围的特征ꎬ称为曲率因子ꎮ在PAC2002轮胎模型中ꎬ滑移率的定义[7 ̄8]示意图如图2所示ꎮ图2㊀轮胎运动速度示意图横向滑移速度Vsy=Vyꎬ式中Vy为轮胎与地面接触点相对于路面的横向速度ꎮ滚动速度Vr=Ω Reꎬ式中Ω为车轮转速ꎻRe为有效滚动半径ꎮ接触点的纵向滑移速度Vsx=Vx-Vrꎬ式中Vx为接触点相对于路面的纵向速度ꎮ纵向滑移率κ=-VsxVxꎮ侧偏角α=tan-1VsyVxꎮ1 1㊀稳态纯驱动(制动)工况轮胎纯直线行驶的车轮运动ꎬ纵向力为Fx0=DxsinDxtan-1Bxκx{[-ExBxκx(-tan-1Bxκx())}]+Svx(2)κx=κ+SHxγx=γ λγx77㊀北京信息科技大学学报第34卷其中Cx=pCx1 λCxDx=μx Fz ζ1μx=pDx1+pDx2dfz() 1-pDx3γ2()λμxEx=pEx1+pEx2dfz+pEx3df2z()ˑ1-pEx4sgnκx(){}λEx㊀㊀纵向滑动刚度Kx=FzpKx1+pKx2dfz() exppKx3dfz()λKxKx=BxCxDx=∂Fx0∂κxtan-1κx()=0Bx=Kx/CxDx()SHx=pHx1+pHx2dfz()λHxSVx=FzpVx1+pVx2dfz()λVxλμxζ11 2㊀稳态纯转弯工况侧向力为Fy0=Fy0αꎬγꎬFZ()=DysinCy[tan-1Byαy{-EyByαy-tan-1Byαy()()}]+SVy(3)回正力矩为MZ0=MZ0αꎬγꎬFZ()= ̄t Fy0+Mzr气动路径为tαt()=DtcosCttan-1Btαt-Et{[Btαt-(tan-1Btαt())}]cosα残余力矩为Mαt()=DrcosCttan-1Brαr()[]cosα1 3㊀稳态驱动(制动)和转弯联合工况纵向力为FxαꎬγꎬκꎬFZ()=Fx0 GxααꎬκꎬFz()(4)加权函数为Gxα=cosCxα[tan-1Bxααs{-ExαBxααs(-tan-1Bxααs())}]/Gxα0Gxα0=cosCxα[tan-1BxαSHxα{-ExαˑBxαSHxα(-tan-1BxαSHxα())}]侧向力为㊀㊀Fy=FyαꎬγꎬκꎬFZ()=Fy0 GyκαꎬκꎬγꎬFz()+Svyk(5)加权函数为Gyκ=cosCyκtan-1Byκκs-Eyκ{[Byκκs(-tan-1Byκκs())}]/Gyκ0Gyκ0=cosCyκtan-1ByκSHyκ-Eyκ{[ˑByκSHyκ-tan-1ByκSHyκ())}](回正力矩为M=MαꎬγꎬκꎬFZ()= ̄t Fꎬy+Mzr+s Fx(6)Fꎬyꎬγ=0=Fy-SVykMzr=Mzrαγꎬeq()=Drcostan-1Brαrꎬeq()[]cosα2㊀仿真分析2 1㊀稳态纯驱动(制动)工况汽车在驱动(制动)直线行驶条件下ꎬ不可避免地会出现轮胎与地面的接触点相对于路面的纵向速度和接触点处的线速度不一致的情况ꎬ用车轮的滑动率(驱动工况时称为滑转率ꎬ被驱动或者制动时称为滑移率)表示车轮相对于纯滚动或者纯滑动状态的偏离程度[12]ꎮ滑动率是影响轮胎产生纵向力的一个重要因素ꎮ而在PAC2002轮胎模型中ꎬ统一用纵向滑移率来表示滑动率(匀速行驶时滑移率为0ꎬ加速行驶时滑移率为正值ꎬ减速行驶时滑移率为负值)ꎮ表1是纯驱动(制动)工况的测试条件ꎮ图3为在表1的测试条件下ꎬ轮胎纵向力和滑移率的关系曲线ꎮ表中FZ0为初载荷ꎬV为速度ꎬκ为滑移率ꎬγ为外倾角ꎬFZ为加载载荷ꎬP为胎压ꎬα为侧偏角ꎮ表1㊀纯驱动(制动)工况的测试条件编号Fz0/NV/(km h-1)κ/%γ/(ʎ)FN/NP/kPa1234400065-40~4001282320551287052220图3㊀轮胎纵向力和纵向滑移率的关系从图3可以看出ꎬ当驱动力矩传递到汽车轮胎时ꎬ在轮胎与路面的接触印迹处会产生切向力ꎬ即车轮驱动力ꎮ在地面切向力的作用下ꎬ轮胎胎面与地面接触处前端受到压缩ꎬ使轮胎后续有效滚动半径增加ꎬ此时轮胎接触点处的滚动速度大于纵向速度ꎬ滑移率为正ꎮ当滑移率在0~7%范围时ꎬ轮胎的滑移主要由胎面的弹性形变引起ꎬ这时车轮力矩与地面切向力随着滑移率近似呈线性关系增加ꎮ当驱动力矩和地面切向力进一步增加从而导致轮胎和地面接触处部分胎面在地面上滑移时ꎬ滑移率进入7%~87第6期尚㊀强等:基于PAC2002魔术公式的轮胎动力学特性分析㊀10%范围ꎮ地面切向力和滑移率呈非线性递增关系ꎬ当滑移率接近10%时地面切向力达到最大值ꎮ滑移率超过10%并且进一步增加时ꎬ轮胎与地面接触区域进入不稳定工况ꎬ地面切向力从峰值缓慢下降ꎬ直到进入纯滑移状态(即滑移率为100%)时的饱和地面切向力ꎮ当制动力作用于轮胎时ꎬ会出现类似的曲线变化关系ꎮ2 2㊀纯转弯工况汽车在行驶过程中ꎬ由于路面的侧向倾斜㊁侧向风或者转弯行驶时的离心力作用ꎬ在轮胎和地面的接触处会出现侧偏力ꎮ轮胎是具有弹性特性的结构部件ꎬ当车轮有侧向弹性时ꎬ车轮的行驶方向会偏离轮胎的车轮平面ꎮ侧偏角就是体现轮胎接触印迹中心线和车轮平面错开的程度ꎮ表2是纯转弯工况下的测试条件ꎮ表2㊀纯转弯工况下的测试条件编号Fz0/NV/(km h-1)α/(ʎ)γ/(ʎ)FN/NP/kPa1234400065-15~1551282320551287052220图4为在表2纯转弯工况的测试条件下仿真得到的轮胎侧向力和侧偏角的关系曲线ꎮ从图4可以看出ꎬ当侧偏角在0ʎ~4ʎ时ꎬ侧偏力随着侧偏角的增加而近似线性增加ꎮ这是由于轮胎是弹性部件ꎬ在弹性范围内ꎬ弹性变形与侧向力呈线性关系ꎮ当侧偏角在4ʎ~6ʎ时ꎬ侧偏力随着侧偏角的增加而缓慢呈非线性增加直到达到峰值侧偏力ꎬ即侧偏角以较大的速率增加时ꎬ侧偏力则以相对较小的速率增加ꎬ曲线的斜率逐渐减小ꎬ这时轮胎在接地面处已经发生部分侧滑ꎮ当侧偏角超过6ʎ以后ꎬ侧偏力逐渐减小ꎬ最终趋向定值ꎬ这时整个轮胎发生侧滑ꎮ另外ꎬ轮胎的侧偏力越大ꎬ轮胎能够产生的侧向加速度就越大ꎬ汽车的极限转弯性能就越好ꎮ汽车在路面上行驶时ꎬ轮胎上的垂直载荷常常会有所变化和转移ꎮ汽车在转弯时ꎬ外侧轮胎上的垂直载荷会增大ꎬ而内侧轮胎上的垂直载荷会有所减小ꎮ同理ꎬ在汽车直线加速或者减速时ꎬ前㊁后轮胎所负载的垂直载荷也会有所变化和转移ꎮ加速行驶时ꎬ前轴轮胎的垂直载荷减小ꎬ后轴轮胎的垂直载荷增大ꎬ减速行驶时ꎬ垂直载荷恰恰相反ꎮ图5为在表2纯转弯工况的测试条件下仿真得到的侧偏刚度与垂直载荷的关系曲线ꎮ图4㊀轮胎侧向力和侧偏角的关系图5㊀侧偏刚度和垂直载荷的关系从图5可以看出ꎬ侧偏刚度随着垂直载荷的增大而增大ꎮ当垂直载荷约为11kN时ꎬ侧偏刚度达到最大值ꎬ约为2100N/(ʎ)ꎬ但是ꎬ垂直载荷过大时ꎬ则会影响轮胎和地面的接触处的压力分布ꎬ并促使压力变得极其不均匀ꎬ从而使轮胎的侧偏刚度反而有所减小ꎮ然而ꎬ轮胎应该具有较高的侧偏刚度(指绝对值)ꎬ这样才能保证汽车具有良好的操作稳定性ꎮ在轮胎发生侧偏时ꎬ地面会产生作用于轮胎绕OZ轴的力矩ꎬ这个力矩称为回正力矩ꎬ大小为轮胎侧向力与轮胎气胎拖距的乘积ꎮ回正力矩是由接地面内分布的微元侧向反力产生的ꎬ圆周行驶时ꎬ回正力矩是使车轮恢复直线行驶位置的主要恢复力矩之一ꎬ它被用来描述实际轮胎侧向力相对于接地中心的非对称性ꎮ车轮滚动时ꎬ印迹长轴线不仅与车轮平面错开一定距离ꎬ而且还转动了一定的角度ꎬ因而印迹前端离车轮平面近ꎬ侧向变形小ꎻ印迹后端离车轮平面远ꎬ侧向变形大ꎮ图6为在表2纯转弯工况的测试条件下仿真得到的回正力矩和侧偏角的关系曲线ꎮ从图6可以看出ꎬ侧偏角在0~3ʎ时ꎬ回正力矩随侧偏角的增大而近似线性迅速增大ꎮ在侧偏角为3ʎ时ꎬ回正力矩达到最大值ꎮ侧偏角继续增大ꎬ回正97㊀北京信息科技大学学报第34卷图6㊀回正力矩和侧偏角的关系曲线力矩开始逐渐下降ꎮ当侧偏角为10ʎ时ꎬ回正力矩减小到零ꎮ侧偏角继续增大ꎬ回正力矩开始成为负值ꎮ这是因为接地面后部发生侧向滑动的速度过大ꎬ摩擦因数较小从而导致的ꎮ此外ꎬ回正力矩也随着垂直载荷的增加而增加ꎮ2 3㊀稳态驱动(制动)和转弯联合工况在驱动(制动)和转弯联合工况下ꎬ轮胎的纵向力㊁侧向力和垂向载荷三者之间是彼此相互影响的ꎮ汽车在路面上转弯驱动和转弯制动时ꎬ必须考虑上述纯转弯㊁纯驱动(制动)这两种轮胎特性的关联情况ꎮ在汽车转弯驱动或转弯制动两种联合工况下ꎬ轮胎会同时产生侧向力和纵向力ꎮ下面分析上述联合工况下ꎬ滑移率㊁侧偏角对侧偏力㊁纵向力㊁侧向力系数(轮胎侧向力与轮胎垂直力之比)以及制动力系数(地面制动力与垂直载荷之比)的影响ꎮ图7为在表3驱动(制动)和转弯联合工况测试条件下得到的制动力系数㊁侧向力系数与滑移率的关系曲线ꎮ表3㊀驱动(制动)和转弯联合工况下的测试条件编号Fz/NV/(km h-1)κ/%γ/(ʎ)α/(ʎ)P/kPa123457052650~100512468220从图7可以看出ꎬ同一侧偏角条件下ꎬ滑移率越低ꎬ侧向力系数越大ꎬ即轮胎保持转向㊁防止侧滑的能力越大ꎬ汽车的稳定性越好ꎮ同时ꎬ制动力系数随着滑动率的增加先近似线性增加ꎬ后缓慢增加ꎬ达到峰值后ꎬ又逐渐减小ꎮ所以ꎬ在汽车转弯制动时ꎬ若能保证滑移率在较低值(如图7中侧偏角为8ʎꎬ滑移率为13%时)ꎬ汽车的轮胎便能获得较大的制动力系数和侧向力系数ꎮ这样ꎬ车辆的制动性能最好ꎬ图7㊀制动力系数㊁侧向力系数与滑移率的关系曲线稳定性能也很好ꎬ两者相对比较均衡ꎮ具有一般制动系的汽车是无法同时满足这一点的ꎬ而制动防抱死系统却能比较完美地平衡制动力系数和侧向力系数ꎬ可以明显改善汽车在制动时的制动效能与方向稳定性ꎮ另外ꎬ应尽量避免制动时轮胎滑移率接近100%ꎬ或者加速时滑移率接近100%ꎬ此时ꎬ轮胎附着力几乎全部都分配给了轮胎制动力ꎬ轮胎侧向力近似为零ꎬ转弯失效ꎮ这就是制动防抱死系统和驱动力控制系统的重要理论依据之一[12]ꎮ图8是在表3驱动(制动)和转弯联合工况的图8㊀纵向力与侧向力之间的关系曲线测试条件下得到的纵向力与侧向力之间的关系曲线图ꎮ从图8可以看出ꎬ在侧偏角一定时ꎬ随着驱动力增加ꎬ侧偏力逐渐减小ꎬ这是由于轮胎侧向弹性有所改变造成的ꎮ当驱动力比较大且接近一定值(如图8中侧偏角为4ʎꎬ驱动力为6000N)时ꎬ侧偏力快速下降ꎬ这时轮胎与地面的摩擦接近附着极限ꎬ纵向驱动力已占用绝大部分的地面附着力ꎬ而侧向力所占附着力比例很小ꎮ当有制动力时ꎬ侧偏力也有相似的变化特征ꎮ另外ꎬ纵向力和侧向力关系的包络线近似为一椭圆ꎬ称为附着椭圆ꎬ它在一定程度上确定了在一定的轮胎附着条件下纵向力与侧偏力合力所08第6期尚㊀强等:基于PAC2002魔术公式的轮胎动力学特性分析㊀能达到的极限值ꎮ轮胎在接地印迹范围内所产生的纵向力和侧向力的合力是一定的ꎬ因此ꎬ汽车在转弯时ꎬ通过控制油门踏板和制动踏板合力分配侧向力和制动的比例关系ꎬ使汽车尽量快速通过弯道ꎮ3 结束语本文基于PAC2002魔术公式轮胎模型ꎬ利用Matalab/Simnlink仿真分析了在3种工况下ꎬ轮胎纵向力㊁侧向力㊁回正力矩与滑移率ꎬ侧偏角和垂直载荷的曲线关系ꎬ做出附着椭圆曲线ꎮ得到了以下结果:1)该型轮胎当侧偏角超过6ʎ以后ꎬ侧偏力逐渐减小ꎬ因此在转向系统设计和驾驶过程中应限制轮胎的侧偏角在6ʎ左右ꎮ2)轮胎垂直载荷达到11kN时ꎬ轮胎的侧偏刚度达到峰值2100N/(ʎ)ꎬ因此该轮胎应使用在总垂直载荷小于11kN的汽车上ꎮ3)汽车转弯制动(驱动)时ꎬ滑移率超过17%以后ꎬ侧向力系数快速减小ꎬ路面不能提供足够的侧向力ꎬ在确定防抱死制动系统参数时必须给予注意ꎮ进一步的工作将是建立整车多自由度仿真模型ꎬ在特定的速度范围内ꎬ着重分析汽车极限工况时的轮胎纵向力和侧向力ꎬ为汽车设计和性能评估提供理论基础ꎮ参考文献:[1]㊀PacejkaHBꎬBesselinkI.Tireandvehicledynamics(third ̄edition)[M].Netherlands:ElsevierLtdꎬ2012:5-12.[2]㊀郭孔辉ꎬ卢荡ꎬ吴海东.轮胎动力学协同发展策略研究[J].中国工程科学.2018(01):91-96.[3]㊀喻凡ꎬ林逸.汽车系统动力学[M].北京:机械工业出版社ꎬ2008:38-70.[4]㊀王和毅ꎬ谷正气.汽车轮胎模型研究现状及其发展分析[J].橡胶工业ꎬ2005ꎬ52(1):58-63.[5]㊀PacejkaHBꎬSharpRS.Shearforcedevelopmentbypneumatictyresinsteadystateconditions:areviewofmodellingaspects[J].VehicleSystemDynamicsꎬ1991ꎬ20(3/4):1212176.[6]㊀李军.ADAMS实用教程[M].北京:北京理工大学出版社ꎬ2002:128-142.[7]㊀任光胜.用MagicFormula对轮胎特性曲线的拟合与优化[J].重庆大学学报:自然科学版ꎬ2001(3):22-24.[8]㊀张剑威.汽车轮胎力学模型研究[D].武汉:武汉理工大学ꎬ2006.[9]㊀余志生.汽车理论[M].北京:机械工业出版社ꎬ2009:92-96.[10]㊀徐志新.车辆轮胎模型 MagicFormula 的模式作用探讨[J].上海汽车ꎬ1998(5):4-6. [11]㊀李松焱ꎬ闵永军ꎬ王良模ꎬ等.轮胎动力学模型的建立与仿真分析[J].南京工程学院学报:自然科学版ꎬ2009(3):34-38.[12]㊀郭孔辉.汽车操纵动力学原理[M].南京:江苏科学技术出版社ꎬ2011:236-325.18。
基于遗传算法的魔术公式轮胎模型参数两级辨识边伟;龚佳慧;文爱民;陈林山;刘奕贯【期刊名称】《重庆交通大学学报(自然科学版)》【年(卷),期】2017(036)005【摘要】为了提高魔术公式(Magic formula,MF)轮胎模型参数的辨识精度及速度,采用参数的两级辨识的方法,定义公式相关的参数B,C,D,E为一级参数,轮胎模型的特性参数为二级参数.首先基于Matlab遗传算法工具箱对一级参数进行辨识,然后基于一级参数的辨识结果再次利用遗传算法对二级参数进行辨识,并且将辨识出的参数带入到魔术公式计算轮胎的受力,拟合出不同载荷下的魔术公式轮胎模型的纵向力随滑移率变化曲线.对一级参数辨识的相对残差为2.196 8%,且遗传代数为40代左右就收敛;二级参数的辨识相对残差为0.840 3%,且遗传代数为20代左右时就收敛.辨识结果表明:对魔术公式轮胎模型参数分两级辨识的方法,可以保证参数辨识的精度,并有效提高辨识的效率,为实时参数辨识提供了高效可靠的方法.【总页数】6页(P115-120)【作者】边伟;龚佳慧;文爱民;陈林山;刘奕贯【作者单位】南京交通职业技术学院汽车工程学院,江苏南京 211188;南京农业大学工学院,江苏南京 210031;南京交通职业技术学院汽车工程学院,江苏南京211188;南京交通职业技术学院汽车工程学院,江苏南京 211188;南京交通职业技术学院汽车工程学院,江苏南京 211188;南京农业大学工学院,江苏南京 210031【正文语种】中文【中图分类】U463.341【相关文献】1.基于遗传算法的魔术公式轮胎模型参数辨识方法研究 [J], 田晶晶;阳冬波;李枭2.利用遗传算法识别汽车轮胎魔术公式参数 [J], 王丹;何乐;孙秀静;夏群生3.基于魔术公式的轮胎参数敏感分析 [J], 顾鹏; 史凤波; 童宝宏; 孙船斌; 曹锟4.基于改进粒子群算法的轮胎模型参数两级辨识 [J], 张丽霞;刘家琪;潘福全;张文彩;郑超艺5.基于魔术公式的轮胎纵滑特性参数计算方法 [J], 邱昌峰;周磊;陈仁全;孙向阳;贾春辉;仇吉伟;张超;杨洪涛因版权原因,仅展示原文概要,查看原文内容请购买。
基于遗传算法的魔术公式轮胎模型参数辨识方法研究田晶晶,阳冬波,李枭【摘要】文章针对魔术公式轮胎模型仿真建模问题,提出了基于遗传算法的魔术公式轮胎模型参数辨识方法。
以动力学仿真软件TRUCKSIM 7.0内置的某轮胎侧向力数据为例,采用构建的辨识方法对其魔术公式参数进行辨识,经过遗传算法1555次迭代后,拟合结果与原始数据之间的误差平方和小于优化目标值0.1,两者之间吻合良好。
通过算例分析表明遗传算法是实现魔术公式轮胎模型非线性、多参数辨识的一种有效手段。
【期刊名称】交通节能与环保【年(卷),期】2014(000)004【总页数】4【关键词】汽车工程;遗传算法;魔术公式;参数辨识轮胎的非线性特性对车辆统的操纵稳定性具有重要的影响,分析轮胎特性对设计车辆零部件以及先进控制系统都非常有必要。
轮胎特性的数学模型通常被应用于车辆仿真模型中,魔术公式轮胎模型是一种半经验轮胎模型,它可以非常准确的描述轮胎的非线性力学特性[1]。
魔术公式轮胎模型以试验数据为基础,通过试验数据辨识出模型参数,所有参数组成了对应的魔术公式轮胎模型,进而可以计算轮胎在其他各种工况下的受力情况。
由于魔术公式具有非线性、多参数的特点,因此如何从试验数据中准确辨识出其对应的参数是非常困难的。
本文提出一种基于遗传算法的魔术公式轮胎模型参数辨识方法。
1 魔术公式轮胎模型魔术公式轮胎模型的构建是基于大量轮胎力学特性试验数据,它除了在试验范围以内具有较高的精度外,在极限值以外的一定范围内仍可较准确的表达轮胎的力学特性,根据轮胎的有限工况进行外推具有较好的置信度。
本文以轮胎侧向力魔术公式为例对其参数辨识过程进行分析。
轮胎侧向力魔术公式一般表达式为[2,3]:其中,Ypure是轮胎侧向力,X是轮胎的侧偏角,本文忽略轮胎的外倾角对轮胎力学特性的影响;D是曲线峰值因子,D=a1·Fz2+a2·Fz;C是曲线形状因子,C=a0;BCD=a3·sin(2.0·arctan(FZ/a4));B是曲线刚度因子,B=BCD/(C·D);E是曲线弧度因子,;E=(a6·Fz+a7)·(1-a17·SIGN(α+Shy));Sh是水平平移量,Sh=a8·Fz+a9;Sν是垂向平移量,Sν=A11·Fz+a12。

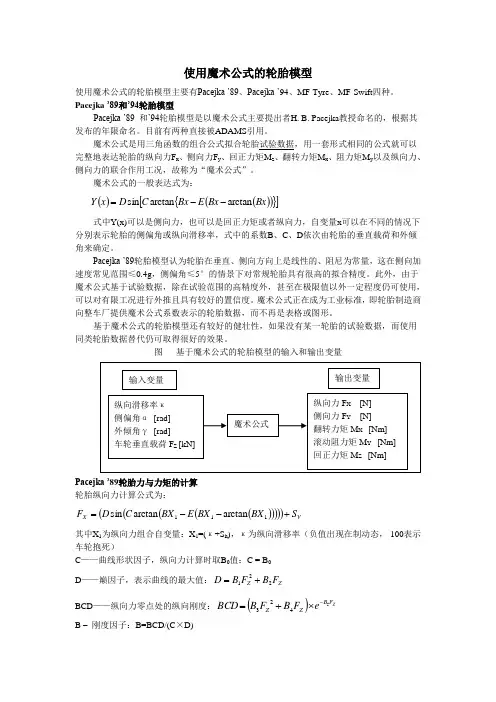
使用魔术公式的轮胎模型使用魔术公式的轮胎模型主要有Pacejka ’89、Pacejka ’94、MF-Tyre 、MF-Swift 四种。
Pacejka ’89和’94轮胎模型Pacejka ’89 和’94轮胎模型是以魔术公式主要提出者H. B. Pacejka 教授命名的,根据其发布的年限命名。
目前有两种直接被ADAMS 引用。
魔术公式是用三角函数的组合公式拟合轮胎试验数据,用一套形式相同的公式就可以完整地表达轮胎的纵向力F x 、侧向力F y 、回正力矩M z 、翻转力矩M x 、阻力矩M y 以及纵向力、侧向力的联合作用工况,故称为“魔术公式”。
魔术公式的一般表达式为:()()(){}[]Bx Bx E Bx C D x Y arctan arctan sin --=式中Y(x)可以是侧向力,也可以是回正力矩或者纵向力,自变量x 可以在不同的情况下分别表示轮胎的侧偏角或纵向滑移率,式中的系数B 、C 、D 依次由轮胎的垂直载荷和外倾角来确定。
Pacejka ’89轮胎模型认为轮胎在垂直、侧向方向上是线性的、阻尼为常量,这在侧向加速度常见范围≤0.4g ,侧偏角≤5°的情景下对常规轮胎具有很高的拟合精度。
此外,由于魔术公式基于试验数据,除在试验范围的高精度外,甚至在极限值以外一定程度仍可使用,可以对有限工况进行外推且具有较好的置信度。
魔术公式正在成为工业标准,即轮胎制造商向整车厂提供魔术公式系数表示的轮胎数据,而不再是表格或图形。
基于魔术公式的轮胎模型还有较好的健壮性,如果没有某一轮胎的试验数据,而使用同类轮胎数据替代仍可取得很好的效果。
图 基于魔术公式的轮胎模型的输入和输出变量Pacejka ’89轮胎力与力矩的计算 轮胎纵向力计算公式为:()()()()()V X S BX BX E BX C D F +--=111arctan arctan sin其中X 1为纵向力组合自变量:X 1=(κ+S h ),κ为纵向滑移率(负值出现在制动态,-100表示车轮抱死)C ——曲线形状因子,纵向力计算时取B 0值:C = B 0D ——巅因子,表示曲线的最大值:Z Z F B F B D 221+= BCD ——纵向力零点处的纵向刚度:()ZF B Z Z e F B F B BCD 5423-⨯+=B – 刚度因子:B=BCD/(C ×D)S h ——曲线的水平方向漂移:109B F B S Z h += S v ——曲线的垂直方向漂移:S v =0E ——曲线曲率因子,表示曲线最大值附近的形状:8726BF B F B E Z Z ++=图 轮胎属性文件中的纵向力计算系数数据块图 Pacejka ’89轮胎纵向力示例轮胎侧向力计算公式为:()()()()()V Y S BX BX E BX C D F +--=111arctan arctan sin此时的X 1为侧向力计算组合自变量:X 1=(α+S h ),α为侧偏角 C ——曲线形状因子,侧向力计算时取A 0值:C = A 0 D ——巅因子,表示曲线的最大值:Z Z F A F A D 221+= BCD ——侧向力零点处的侧向刚度:()γ5431arctan2sin A A F A BCD Z-⨯⎪⎪⎭⎫ ⎝⎛= B – 刚度因子:B=BCD/(C ×D)S h ——曲线的水平方向漂移:γ8109A A F A S Z h ++=曲线形状因子巅因子计算系数 BCD 计算系数 曲线水平漂移计算系数曲线曲率因子计算系数S v ——曲线的垂直方向漂移:131211A F A F A S Z Z V ++=γE ——曲线曲率因子,表示曲线最大值附近的形状:76AF A E Z +=图 轮胎属性文件中的侧向力计算系数数据块图 Pacejka ’89轮胎纵向力示例轮胎回正力矩计算公式为:()()()()()V Z S BX BX E BX C D M +--=111arctan arctan sin此时的X 1为回正力矩计算组合自变量:X 1=(α+S h ),α为侧偏角 C ——曲线形状因子,回正力矩计算时取C 0值:C = C 0 D ——巅因子,表示曲线的最大值:Z Z F C F C D 221+=BCD ——回正力矩零点处的扭转刚度:()()ZF C Z Z e C F C F C BCD 564231-⨯-⨯+=γB – 刚度因子:B=BCD/(C ×D)S h ——曲线的水平方向漂移:131211C F C C S Z h ++=γ曲线形状因子巅因子计算系数 BCD 计算系数 曲线水平漂移计算系数 曲线曲率因子计算系数 曲线垂直漂移计算系数S v ——曲线的垂直方向漂移:()171615214C F C F C F C S Z Z Z V +++=γE ——曲线曲率因子,表示曲线最大值附近的形状:()()γ1098271C C F C F C E Z Z -⨯++=图 轮胎属性文件中的回正力矩计算系数数据块图 Pacejka ’89轮胎回正力矩示例侧偏刚度(Lateral Stiffness )侧偏刚度在Pacejka ’89和’94轮胎模型中假定是一个常量,在轮胎属性文件的参数PARAMETER 数据段中通过LATERAL_STIFFNESS 语句设定。
MATLAB Simulation Research Based on the "Magic
Formula" Tire Model
作者: 梁春兰;盛鹏程;刘卫泽
作者机构: 邢台职业技术学院汽车工程系,河北邢台054035
出版物刊名: 邢台职业技术学院学报
页码: 63-66页
年卷期: 2013年 第1期
主题词: 魔术公式;轮胎模型;ESP;MATLAB;SIMULINK仿真
摘要:轮胎特性的好坏直接决定了汽车操纵稳定性的优劣,建立较精确的汽车轮胎模型是ESP系统仿真精度的前提。
本文基于Pacejka的“魔术公式”轮胎模型,采用MATLAB/SIMULINK软件实现轮胎纵向力和横向力数学模型到仿真模型的转换,并对其进行仿真分析。
结果表明该模型为后继的ESP系统控制研究提供了合理正确的模型。

2.3.3“魔术公式”轮胎模型“魔术公式”轮胎模型用三角函数的组合公式拟合实验轮胎数据,用一套形式相同的公式就能完整的表达纵向力、侧向力、回正力矩以及纵向力、侧向力联合作用的工况。
该模型统一性强,能描述轮胎所有稳态力学特性,编程方便;可从实际轮胎实验获得,且需拟合的参数少,有实际的物理意义;简单实用,模拟精度高,并能最大限度地反映出车辆的实际运作状况。
故本文采用“魔术公式”轮胎模型一起建立整车系统动力学模型[14]。
“魔术公式”的一般表达式为:SY=Dsin(Carctan(Bφ))+v(2.17)φ=(1-E)(X+h S)+(E/B)arctan(B(X+h S))(2.18)其中,D—峰值因子,表示曲线的最大值;B—刚度因子,B=BCD/(CD);E—曲线曲率因子,决定曲线最大值附近的形状;C—曲线形状因子,决定曲线的形状特性,即曲线是表示侧向力、纵向力还是回正力矩;S—水平方向漂移;hS—垂直方向漂移;v而Y表示侧向力、纵向力或回正力矩,X表示侧偏角α或滑移率λ。
F和侧倾角γ的函除曲线的形状因子C外,其余每一个参数都是垂直载荷z数用参数拟合的方法得到,一般选代数多项式进行拟合。
曲线零点的水平漂移和垂直漂移用来描述由于轮胎制造误差而造成的轮胎圆锥效应和帘布层转向效应。
一般地,曲线零点的水平方向漂移和垂直方向漂移与轮胎侧倾角有关,本文将不考虑轮胎力特性曲线的水平方向漂移和垂直方向漂移,主要从纯滑移及纯侧偏两方面考虑:①纯滑移条件下纵向力公式为:F(λ)=x D sin(x C arctan(x Bλ-x E(x Bλ-arctan(x Bλ))))x0(2.19)式中,x C =1.65;x D =z z F a F a 221+;x B =)exp()5425z z z F a F a F a -+(/(x C x D );x E =8726a F a F a z z ++;λ—车轮滑移率;x0F (λ)—由纯滑移条件下计算出的纵向力的值。
车辆动力学仿真中的轮胎数学模型研究现状3471039 洛阳工学院 周学建 周志立 张文春 摘要 对车辆动力学仿真中的轮胎数学模型现状进行了分析,简要说明了轮胎动力学建模的新方法并进行了展望。
Abstract The current state of the mathematical m odel of tire dynamics is analysis.The new methods of m odelling are ex2 plained and forecasted. 关键词:车辆 轮胎 动力学 数学模型 车辆的充气轮胎具有支承车辆质量、在车辆驶过不平地面时进行缓冲、为驱动和制动提供足够附着力、提供足够的转向操纵与方向稳定性的作用。
除空气的作用力和重力外,几乎其他影响地面车辆运动的力和力矩皆由轮胎与地面接触而产生。
因此,轮胎动力学特性的研究,对研究车辆性能来说是非常必要的[1]。
车辆运动依赖于轮胎所受的力,如纵向制动力和驱动力、侧向力和侧倾力、回正力矩和侧翻力矩等。
所有这些力都是滑转率、侧偏角、外倾角、垂直载荷、道路摩擦系数和车辆运动速度的函数,如何有效地表达这种函数关系,即建立精确的轮胎动力学数学模型,一直是轮胎动力学研究人员所关心的问题。
轮胎的动力学特性对车辆的动力学特性起着至关重要的作用,特别是对车辆的操纵稳定性、制动安全性、行驶平顺性具有重要的影响。
现代车辆动力学的发展不仅需要建立能反映物理实际的精确轮胎模型,而且需要建立的轮胎数学模型能满足车辆不同方面研究,如多自由度仿真、先进车辆控制系统的需要[2]。
1 轮胎动力学建模方法及研究现状轮胎动力学建模方法有理论方法、经验和半经验方法,建立的模型有理论模型、经验和半经验模型。
1.1 理论模型由于轮胎的结构十分复杂,在侧偏和纵滑时其受力和变形难于确定,另外,轮胎和路面之间的摩擦耦合特性也具有不稳定的多变性。
在目前阶段,很难根据轮胎的物理特性和真实的边界条件来精确地计算轮胎的偏滑特性。
在车辆操纵动力学模型中轮胎模型的研究一、轮胎力学特性和建模的研究历史与现状轮胎动态特性的研究可以追溯到上个世纪三十年代,Bradly和Allen(1931)为了研究汽车的动态特性,开始涉及到轮胎的动态特性。
接着又有很多科学家致力于轮胎动态特性的研究,德国的Fromm(1941)对轮胎结构进行了简化,推导出了描述轮胎侧偏特性的简单理论模型,第一次对轮胎的侧偏特性进行了理论研究。
Fiala(1954)在弹性“梁”模型的基础上,建立了侧向力,回正力矩与侧偏角和外倾角的关系。
在以后的几十年中,Fiala的理论模型得到了进一步的研究和改进。
Frank(1965)在Fiala理论模型的基础上,把胎体看作一个受弯曲的梁,研究了胎体弯曲对轮胎特性的影响。
从六十年代开始,Pacejka将胎体的变形简化为受拉的“弦”,对轮胎的静态和动态特性进行了大量的理论和试验研究。
并在后来(1989,1991)对模型进行了进一步的改进和发展,形成了著名的“Magic Formula”模型。
Sharp(1986)提出了轮辐式轮胎模型,将轮胎看作完全由相同的径向轮辐组成,这些轮辐与轮毂连接在一起,而且具有弹性。
轮辐的周期性变化会导致迟滞损失。
建立了与实际相当吻合的轮胎模型。
九十年代初,随着汽车先进底盘控制技术,虚拟原型设计以及计算机辅助工程等先进技术的飞速发展,轮胎的动态力学特性研究受到了广泛的重视。
有很多科学家致力于动态特性的研究,也得到了飞速的发展。
我国郭孔辉教授领导的科研小组二十几年来一直致力于轮胎力学特性的理论和试验研究,自行开发了具有多种功能的轮胎力学特性试验台,并利用该试验台在试验研究和理论研究上取得了重大突破。
郭孔辉教授(1986)建立了具有任意印迹压力分布的轮船侧偏特性简化理论模型。
并在该模型基础上先后推导出了纵滑侧偏特性简化理论模刑(1986),用于汽车转向,制动与驱动动态仿真的统一模型(1986),并在大量试验和理论研究的基础上提出了一种适用于较大载荷和侧偏角变化范围的轮胎侧偏特性半经验模型(1986)。
车辆轮胎模型“MagicFormula”的范式作用探讨
徐志新
【期刊名称】《上海汽车》
【年(卷),期】1998(000)005
【摘要】范式是一种具有示范意义的特殊的科学成果。
本文从范式作用的角度探讨了目前在轮胎领域具有重要影响的轮有台模型“MagicFormula”。
试图为科研成果的深入和推广提供一条思路。
【总页数】3页(P4-6)
【作者】徐志新
【作者单位】同济大学机械工程系
【正文语种】中文
【中图分类】U463.341
【相关文献】
1.碳纤维与工程车辆翻新轮胎复合强化模型及增强机理 [J], 王强;齐晓杰;王云龙;王国田
2.胶轮轻轨车辆的轮胎力学模型及其仿真分析 [J], 李东宇;李芾
3.面向车辆平顺性的轮胎面内刚性环模型研究 [J], 程洪杰;刘准;刘志浩;王旭
4.基于复合滑移轮胎模型的车辆横纵协同优化控制 [J], 李梓涵; 陈虹; 王萍
5.基于Dugoff轮胎模型对车辆质心侧偏角估计 [J], 张亮;石沛林;周龙辉;蒋军锡;梁明磊;侯建伟
因版权原因,仅展示原文概要,查看原文内容请购买。
2.3.3“魔术公式”轮胎模型“魔术公式”轮胎模型用三角函数的组合公式拟合实验轮胎数据,用一套形式相同的公式就能完整的表达纵向力、侧向力、回正力矩以及纵向力、侧向力联合作用的工况。
该模型统一性强,能描述轮胎所有稳态力学特性,编程方便;可从实际轮胎实验获得,且需拟合的参数少,有实际的物理意义;简单实用,模拟精度高,并能最大限度地反映出车辆的实际运作状况。
故本文采用“魔术公式”轮胎模型一起建立整车系统动力学模型[14]。
“魔术公式”的一般表达式为:SY=Dsin(Carctan(Bφ))+v(2.17)φ=(1-E)(X+h S)+(E/B)arctan(B(X+h S))(2.18)其中,D—峰值因子,表示曲线的最大值;B—刚度因子,B=BCD/(CD);E—曲线曲率因子,决定曲线最大值附近的形状;C—曲线形状因子,决定曲线的形状特性,即曲线是表示侧向力、纵向力还是回正力矩;S—水平方向漂移;hS—垂直方向漂移;v而Y表示侧向力、纵向力或回正力矩,X表示侧偏角α或滑移率λ。
F和侧倾角γ的函除曲线的形状因子C外,其余每一个参数都是垂直载荷z数用参数拟合的方法得到,一般选代数多项式进行拟合。
曲线零点的水平漂移和垂直漂移用来描述由于轮胎制造误差而造成的轮胎圆锥效应和帘布层转向效应。
一般地,曲线零点的水平方向漂移和垂直方向漂移与轮胎侧倾角有关,本文将不考虑轮胎力特性曲线的水平方向漂移和垂直方向漂移,主要从纯滑移及纯侧偏两方面考虑:①纯滑移条件下纵向力公式为:F(λ)=x D sin(x C arctan(x Bλ-x E(x Bλ-arctan(x Bλ))))x0(2.19)式中,x C =1.65;x D =z z F a F a 221+;x B =)exp()5425z z z F a F a F a -+(/(x C x D );x E =8726a F a F a z z ++;λ—车轮滑移率;x0F (λ)—由纯滑移条件下计算出的纵向力的值。