汽车动力学 轮胎动力学
- 格式:pptx
- 大小:5.63 MB
- 文档页数:34
前轮驱动横摆力矩计算公式在汽车动力学中,轮驱动横摆力矩是一个重要的参数,用于描述车辆在转弯过程中轮胎与地面之间的摩擦力。
它对车辆的操控性能和稳定性有着重要影响。
本文将介绍轮驱动横摆力矩的计算公式及其应用。
轮驱动横摆力矩是指由于车辆转弯时,驱动轮产生的横向力矩。
它的大小与驱动轮的横向力、轮胎的侧向摩擦力以及驱动轮的几何参数等因素有关。
在理想情况下,驱动轮产生的横向力矩应该与转弯半径成正比,即横向力矩等于转弯半径乘以一个常数。
然而,在实际情况下,横向力矩与转弯半径之间的关系是复杂的,需要通过计算公式来进行准确计算。
轮驱动横摆力矩的计算公式可以分为两部分:驱动轮侧向力的计算和横摆力矩的计算。
计算驱动轮的侧向力。
驱动轮的侧向力可以通过下面的公式计算:Fy = Fz * (1 - Fy0/Fz0) * (1 - Fy1/Fz1) * (1 - Fy2/Fz2)其中,Fy为驱动轮的侧向力,Fz为驱动轮的垂向力,Fy0、Fz0为静止情况下的侧向力和垂向力,Fy1、Fz1为车辆加速情况下的侧向力和垂向力,Fy2、Fz2为车辆制动情况下的侧向力和垂向力。
该公式考虑了驱动轮在不同工况下的侧向力变化。
然后,根据驱动轮的侧向力计算轮驱动横摆力矩。
轮驱动横摆力矩可以通过下面的公式计算:Mz = Fy * b其中,Mz为轮驱动横摆力矩,Fy为驱动轮的侧向力,b为驱动轮的轴距。
该公式表示,轮驱动横摆力矩等于驱动轮的侧向力乘以轮轴距。
通过以上的计算公式,可以准确计算出轮驱动横摆力矩的大小。
这对于评估车辆的操控性能和稳定性非常重要。
在实际应用中,可以通过对驱动轮的力学性能和几何参数进行测量和测试,然后代入计算公式进行计算。
通过不断优化驱动轮的设计和调整,可以提高车辆的操控性能和稳定性。
总结起来,轮驱动横摆力矩是描述车辆在转弯过程中驱动轮产生的横向力矩。
它的计算公式包括驱动轮侧向力的计算和横摆力矩的计算。
通过准确计算轮驱动横摆力矩的大小,可以评估车辆的操控性能和稳定性,并优化驱动轮的设计和调整。
汽车底盘系统的动力学仿真分析随着汽车工业的发展,汽车底盘系统的动力学设计变得日益重要。
在实际车辆使用中,底盘系统的动力学性能直接关系到车辆行驶的舒适性以及安全性。
因此,对汽车底盘系统的动力学仿真分析变得至关重要。
本文将从汽车底盘系统的动力学模型入手,探讨汽车底盘系统的动力学仿真分析方法。
一、汽车底盘系统的动力学模型汽车底盘系统包括弹性元件、阻尼器、非线性元件以及刚性部件等多种组成部分。
在底盘系统中,车轮、车轮悬挂系统以及车身的运动均需要综合考虑。
为了对底盘系统进行动力学仿真分析,需要对底盘系统建立动力学模型。
根据底盘系统的力学特性,可以将底盘系统建立为运动学模型、动力学模型或者系统模型。
在本文中,我们将建立汽车底盘系统的动力学模型。
该模型主要包括刚性部件、悬挂系统、轮胎以及弹性元件。
其中,刚性部件主要包括车身、车轮、驱动轴等,其作用是通过传递力和运动以维持底盘系统的稳定。
悬挂系统主要包括车轮悬挂和车体悬挂两部分,其作用是消除路面不平的冲击和震动,保证车辆行驶的舒适性和稳定性。
轮胎是车辆和地面之间唯一的接触点,其负责为车辆提供支撑力和摩擦力。
弹性元件主要通过变形吸收能量,并且在底盘系统的运动过程中存储和释放能量。
在建立汽车底盘系统的动力学模型时,需要制定一系列假设和条件。
首先,假设底盘系统的分析范畴为平面运动问题,忽略其在垂直于地面方向的运动。
其次,假设车辆的运动是弹性变形和刚性变形的叠加。
最后,假设底盘系统的运动是连续的,每一个时刻其状态是唯一确定的。
二、汽车底盘系统的动力学仿真分析方法建立好汽车底盘系统的动力学模型后,就可以进行动力学仿真分析了。
在本文中,我们将介绍几种常用的汽车底盘系统动力学仿真分析方法,包括有限元法、多体系统动力学方法、驱动力控制方法以及拓扑优化方法。
1、有限元法有限元法是一种基于离散化原理的数值计算方法,主要用于解决复杂结构的静力学和动力学问题。
其基本思想是将复杂结构离散为一系列小单元,并对每个单元制定有限元失配的符号,从而获得一组逐个时刻的动力学方程。
几种进行汽车轮胎滚动半径自由半径静力半径的常规算法在进行汽车轮胎相关计算时,常见的算法包括车轮滚动半径、自由半径和静力半径的计算。
本文将详细介绍这几种常规算法,以加深对它们的了解。
车轮滚动半径是指车轮相对于车辆的滚动半径,通常用于计算车辆的距离、速度等相关参数。
计算车轮滚动半径的常规算法如下:1.轮胎直径法:根据车辆实际轮胎直径和单位负荷面长度计算,即滚动半径等于轮胎半径减去负荷半径。
2.起始点与终点坐标法:根据车辆行驶的起始点和终点坐标,通过勾股定理计算走过的距离,再将距离除以车辆转过的角度即可得到滚动半径。
3.轮胎外园定位点法:根据车轮在行驶过程中,外侧胎面与路面碰触的地点来计算滚动半径,该方法需要根据车辆行驶的路线进行详细的计算,比较繁琐。
自由半径是指车轮在没有外力作用下沿着水平面滚动产生的倾斜角度半径,通常用于计算车辆的静力稳定性。
计算自由半径的常规算法如下:1.几何法:根据车轮滚动时,车轮外侧点的坐标及其对车轮中心的距离,通过勾股定理计算半径。
2.数学建模法:根据车车轮的形状、轴向行走速度、自由运动条件建立微分方程并求解得到自由半径。
静力半径是指车轮在受到垂直方向的力作用后,产生的倾斜角度所对应的半径,通常用于计算悬架系统的设计参数。
1.几何法:通过车轮半径与静摩擦系数的乘积,根据车辆通过倾斜角度的正切值计算静力半径。
2.动力学法:根据车轮受力平衡方程,结合车辆的车速、质量分布和弯道力等力的作用下,通过求解方程组的方法得到静力半径。
总结起来,以上是几种进行汽车轮胎滚动半径、自由半径、静力半径计算的常规算法。
不同的算法适用于不同的场景和需求,根据实际情况选择合适的算法有助于准确计算和设计车辆轮胎相关参数,提高车辆的性能和安全性。
车辆轮胎动力学仿真模型分析田顺;何海浪;赵建宁;刘卓凡【摘要】分析了各种常用轮胎模型的特点和利用范围,介绍了ADAMS中轮胎试验台(tire testing)这一轮胎参数可视化工具,利用这一工具分析比较一种物理轮胎模型与一种经验-半经验轮胎模型间关于侧向力与纵向力、纵向力与纵向滑移率、回正力矩与纵向滑移率的力学特性,针对一种魔术公式轮胎模型验证了侧向力和纵向滑移率、纵向力和纵向滑移率在不同载荷下的力学关系特性.【期刊名称】《汽车实用技术》【年(卷),期】2014(000)006【总页数】4页(P47-50)【关键词】轮胎;tire testing;力学仿真【作者】田顺;何海浪;赵建宁;刘卓凡【作者单位】长安大学,陕西西安710064;长安大学,陕西西安710064;长安大学,陕西西安710064;长安大学,陕西西安710064【正文语种】中文【中图分类】U463.341CLC NO.:U463.341Document Code:A A rticle ID: 1671-7988(2014)06-47-04 轮胎是车辆与与地面之间力传递的媒介,轮胎的力学特性直接关系到汽车的行驶稳定性及转向性能。
轮胎是一个非线性力学部件,轮胎的侧偏特性在很大程度上决定着车辆的操纵稳定性,行驶过程中轮胎所受的回正力矩、纵向力、侧向力与轮胎侧偏角、横向滑移率、纵向滑移率之间的力学关系都是需要研究的对象。
因此,对轮胎动力学模型的研究对汽车整车动力学性能的分析以及轮胎新产品的开发都有实际意义。
轮胎试验台(tire testing)是ADAMS2007版本开始新增的一个轮胎特性参数可视化工具,常用于轮胎特性的研究以及不同模型间的比较。
建立轮胎模型的方法分为三种:(1)物理模型在分析轮胎的力学特点后,通过合理的物理简化,轮胎结构被近似看成由若干物理结构组成的模型,并且用该物理模型的变形代替轮胎的变形。
此类轮胎物理模型的特点是比较复杂,优点是此类模型具有明确的解析表达式,可用于轮胎常规特性的探讨,但由于轮胎的实际结构很难用物理模型精确表示,所以此类模型精度较差,且计算繁复。
汽车系统动⼒学习题答案1.汽车系统动⼒学发展趋势随着汽车⼯业的飞速发展,⼈们对汽车的舒适性、可靠性以及安全性也提出越来越⾼的要求,这些要求的实现都与汽车系统动⼒学相关。
汽车系统动⼒学是研究所有与汽车系统运动有关的学科,它涉及的范围较⼴,除了影响车辆纵向运动及其⼦系统的动⼒学响应,还有车辆在垂向和横向两个⽅⾯的动⼒学内容,随着多体动⼒学的发展及计算机技术的发展,使汽车系统动⼒学成为汽车CAE技术的重要组成部分,并逐渐朝着与电⼦和液压控制、有限元分析技术集成的⽅向发展,主要有三个⼤的发展⽅向:(1)车辆主动控制车辆控制系统的构成都将包括三⼤组成部分,即控制算法、传感器技术和执⾏机构的开发。
⽽控制系统的关键,控制律则需要控制理论与车辆动⼒学的紧密结合。
(2)多体系统动⼒学多体系统动⼒学的基本⽅法是,⾸先对⼀个由不同质量和⼏何尺⼨组成的系统施加⼀些不同类型的连接元件,从⽽建⽴起⼀个具有合适⾃由度的模型;然后,软件包会⾃动产⽣相应的时域⾮线性⽅程,并在给定的系统输⼊下进⾏求解。
汽车是⼀个⾮常庞⼤的⾮线性系统,其动⼒学的分析研究需要依靠多体动⼒学的辅助。
(3)“⼈—车—路”闭环系统和主观与客观的评价采⽤⼈—车闭环系统是未来汽车系统动⼒学研究的趋势。
作为驾驶者,⼈既起着控制器的作⽤,⼜是汽车系统品质的最终评价者。
假如表达驾驶员驾驶特性的驾驶员模型问题得到解决后,“开环评价”与“闭环评价”的价值差别也许就不存在了。
因此,在⼈—车闭环系统中的驾驶员模型研究,也是今后汽车系统动⼒学研究的难题和挑战之⼀。
除驾驶员模型的不确定因素外,就车辆本⾝的⼀些动⼒学问题也未必能完全通过建模来解决。
⽬前,⼈们对车辆性能的客观测量和主观之间的复杂关系还缺乏了解,⽽车辆的最终⽤户是⼈。
因此,对车辆系统动⼒学研究者⽽⾔,今后⼀个重要的研究领域可能会是对主观评价与客观评价关系的认识2.⽬前汽车系统动⼒学的研究现状汽车系统动⼒学研究内容范围很⼴,包括车辆纵向运动及其⼦系统的动⼒学响应,还有车辆垂向和横向动⼒学内容。
汽车高等动力学讲解-CAL-FENGHAI.-(YICAI)-Company One1侧偏力:汽车在行驶过程中,由于路面的侧向倾斜、侧向风、或者曲线行驶时的离心力等的作用,车轮中心沿Y轴方向将作用有侧向力F y,相应地在地面上产生地面侧向反作用力F Y,F Y即侧偏力。
侧偏现象:当车轮有侧向弹性时,即使F Y没有达到附着极限,车轮行驶方向也将偏离车轮平面cc,这就是轮胎的侧偏现象。
侧偏角:车轮与地面接触印迹的中心线与车轮平面错开一定距离,而且不再与车轮平面平行,车轮印迹中心线跟车轮平面的夹角即为侧偏角。
高宽比:以百分数表示的轮胎断面高H与轮胎断面宽B 之比 H/B×100% 叫高宽比.附着椭圆:它确定了在一定附着条件下切向力与侧偏力合力的极限值。
转向灵敏度:汽车等速行驶时,在前轮角阶跃输入下进入的稳态响应就是等速圆周行驶。
常用输出与输入的比值,如稳态的横摆角速度与前轮转角之比来评价稳态响应,这个比值称为稳态横摆角速度增益,也就是转向灵敏度。
(即稳态的横摆角速度与前轮转角之比)稳定性因数:稳定性因数单位为s2/m2,是表征汽车稳态响应的一个重要参数。
侧倾轴线:车厢相对于地面转动时的瞬时轴线称为车厢侧倾轴线。
侧倾中心:车厢侧倾轴线通过车厢在前,后轴处横断面上的瞬时转动中心,这两个瞬时中心称为侧倾中心。
悬架的侧倾角刚度:悬架的侧倾角刚度是指侧倾时(车轮保持在地面上),单位车厢转角下,悬架系统给车厢总的弹性恢复力偶矩。
转向盘力特性:转向盘力随汽车运动状况而变化的规律称为转向盘力特性。
切向反作用力控制的三种类型:总切向反作用力控制,前后轮间切向力分配比例的控制,内外侧车轮间切向力分配的控制。
侧翻阈值:汽车开始侧翻时所受的侧向加速度称为侧翻阈值。
汽车的平顺性:汽车的平顺性主要是保持汽车在行驶过程中产生的振动和冲击环境对乘员舒适性的影响在一定界限之内,主要根据乘员的主观感觉的舒适性来评价。
1.汽车的操纵稳定性:是指在驾驶者不感到过分紧张、疲劳的情况下,汽车能遵循驾驶者通过转向系统及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。
轮胎动力学协同创新联盟(以下简称轮学盟) 是在自愿、平等、互利、合作的基础上,由来自汽车、飞机、轮胎、高校、行业管理单位及技术服务单位等多方力量组成的跨行业、开放性、非营利性的联合体,并为轮学盟理事单位、轮学盟成员提供一个专业、诚信、可靠的资源共享和技术交流的服务平台。
轮学盟致力于在汽车、轮胎、飞机等行业及上下游产业之间建立有效运行的产学研合作新机制,实现轮学盟成员的共同发展。
轮学盟的宗旨是:协同创新、集聚资源、战略合作、共策共力、突破瓶颈、互赢共荣。
轮学盟接受国家相关部委指导。
贯彻落实《中国创造 2025》战略,坚持创新驱动,以提升产业技术创新能力为目标,以集成优化创新资源配置为核心,以建立健全政产学研用协同创新机制为手段,汇聚整合汽车、飞机、轮胎等相关行业资源及优势,突出协同配合,加强国际合作,联合开展轮胎动力学共性关键技术的研究和应用,探索建立以企业为主体,市场化、多元化投融资和成果转化的有效机制,打造政产学研用多赢的创新平台。
第六条轮学盟主要在以下几个方面开展工作:(一)政策和战略研究。
为推动行业良性快速发展,明确发展战略和路径规划,环绕轮胎动力学发展重点领域和关键问题,加强统筹协调,开展行业发展政策和战略研究,为政府和行业提供战略规划和政策措施等方面的咨询服务。
(二)关键共性技术研发。
环绕轮胎动力学共性关键技术开展联合攻关,积极推动轮学盟单位研发具有自主知识产权、对行业有重大影响的共性技术,形成轮胎动力学共性技术研究平台和持续技术研发能力。
(三)标准法规。
组织轮学盟成员单位参加制定轮胎动力学国家标准及团体标准和规范,加强技术标准基础研究,支撑国家和行业标准制修订工作;开展轮胎动力学相关法律法规研究,本着循序渐进和有利于创新的原则,提出相关法律法规制订及修订建议。
(四)测试评价。
组织开展轮胎动力学测试技术及评价方法研究,提出评价指标,编制轮胎动力学测试评价标准,建立完整的测试评价技术体系,推动我国轮胎动力学测试评价相关标准和规范与国际的合作与联动。
《汽车动力学》试题一、名词解释(每题3分)1.回正力矩答:在轮胎发生侧偏时,产生作用于轮胎绕OZ轴(轮胎坐标系)的力矩,即为回正力矩。
2.轮胎侧偏现彖答:半车轮冇侧向弹性时,即使侧向力没有达到附着极限,车轮行驶方向亦将偏离车轮平面,这就是轮胎的侧偏现彖。
3.同步附着系数答:对丁-前后制动器制动力为固定比值的汽车,车辆制动时使得车辆前后轮同时抱死的路而附着系数即为同步附着系数。
(或采用卩线与I线交点说明也可以,但是必须交代卩线与I线的具体含义)4.旋转质量换算系数答:汽车的质量分为平移质量和旋转质量两部分。
汽车加速时,不仅平移质量产生惯性力,旋转质量也要产生惯性力偶矩。
为了便于计算,-•般把旋转质量的惯性力偶矩转化为平移质最的惯性力,对于固定传动比的汽车,常以常数6作为计入旋转质鼠惯性力偶矩后的汽车旋转质量换算系数。
5.理想的制动力分配特性答:汽车制动时,前、后车轮同时抱死时前、后轮制动器制动力的分配特性。
二、简答题(每题5分)1.汽车的驱动附着条件是什么?答:汽车驱动条件:F t>F^x汽车附着条件:尸心< 伦护:上式中,听表示驱动力,心I表示行驶阻力,代匸表示作用在驱动轮上的转矩引起的地面切向反作用力,F, 示驱动轮法向反作用力(亦可以直接指定驱动轮后进行描述),0为附着系数。
2.汽车制动性能主要由哪几个方面评价?答:主要由以卜三个方面评价:1)制动效能,及制动距离与制动减速度;2)制动效能的恒定性,即抗热衰退性能。
3)制动时汽车的方向稳定性,即制动时汽车不发生览偏、测滑以及市区专项能力的性能。
3.汽车制动跑偏的原因主要有哪些?答:制动时汽车跑偏的原因有两个:1)汽车左、右车轮,特别是前轴左、右车轮(转向轮)制动器的制动力不相等。
2)制动时悬架导向杆与转向系在运动学上的不协调(互相干涉)•4.汽车的稳态转向特性有几种类型?实际的汽车应貝有哪种稳态转向特性,简述理由。
答:汽车的稳态转向特性分为三种类型:不足转向、中性转向和过多转向。
2006.61.简要按形成原因汽车空气阻力怎么分类?简单概述各种阻力的形成。
(P82)汽车空气阻力分为形状阻力、干扰阻力、内循环阻力、诱导阻力以及摩擦阻力;1)形状阻力占压差阻力的大部分,主要与边界层流态和车身后的流体分离产生的尾涡有关;2)干扰阻力是由于车身表面凸起物、凹坑和车轮等局部的影响着气流的流动而引起的空气阻力;3)内循环阻力是流经车身内部的气流对通道的作用以及流动中的能量损耗产生的;4)诱导阻力是在侧面由下向上的气流形成的涡流的作用下,车顶上面的气流在后背向下偏转,产生的实际升力中一向后的水平分力;5)摩擦阻力是由于空气粘性使其在车身表面产生的切向力.2.简述汽车的楔形造型在空气动力特性方面的特点。
1)前端低矮,进入底部的空气量少,底部产生的空气阻力小;2)发动机罩与前风窗交接处转折平缓,产生的空气阻力小;3)后端上缘的尖棱,使得诱导阻力较小;4)前低后高,‘翼形’迎角小,使空气升力小;5)侧视轮廓图前小后大,气压中心偏后,空气动力稳定性好。
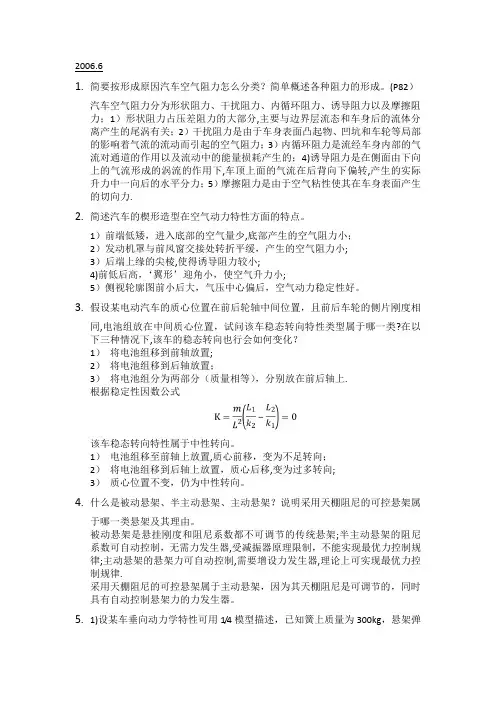
3.假设某电动汽车的质心位置在前后轮轴中间位置,且前后车轮的侧片刚度相同,电池组放在中间质心位置,试问该车稳态转向特性类型属于哪一类?在以下三种情况下,该车的稳态转向也行会如何变化?1)将电池组移到前轴放置;2)将电池组移到后轴放置;3)将电池组分为两部分(质量相等),分别放在前后轴上.根据稳定性因数公式该车稳态转向特性属于中性转向。
1)电池组移至前轴上放置,质心前移,变为不足转向;2)将电池组移到后轴上放置,质心后移,变为过多转向;3)质心位置不变,仍为中性转向。
4.什么是被动悬架、半主动悬架、主动悬架?说明采用天棚阻尼的可控悬架属于哪一类悬架及其理由。
被动悬架是悬挂刚度和阻尼系数都不可调节的传统悬架;半主动悬架的阻尼系数可自动控制,无需力发生器,受减振器原理限制,不能实现最优力控制规律;主动悬架的悬架力可自动控制,需要增设力发生器,理论上可实现最优力控制规律.采用天棚阻尼的可控悬架属于主动悬架,因为其天棚阻尼是可调节的,同时具有自动控制悬架力的力发生器。
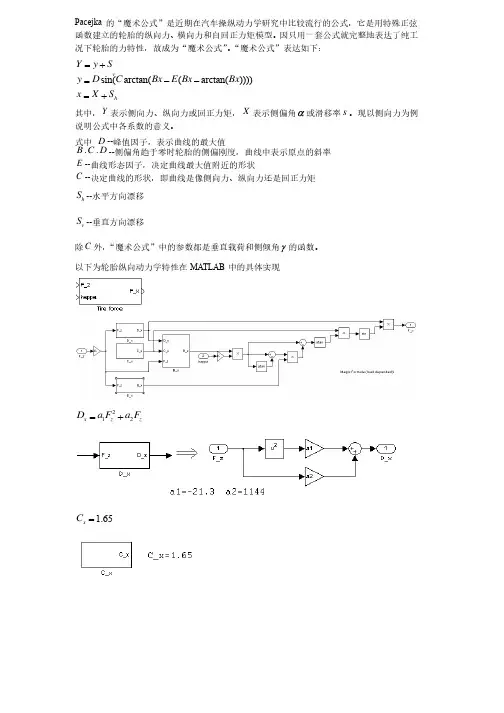
Pacejka 的“魔术公式”是近期在汽车操纵动力学研究中比较流行的公式,它是用特殊正弦函数建立的轮胎的纵向力、横向力和自回正力矩模型。
因只用一套公式就完整地表达了纯工况下轮胎的力特性,故成为“魔术公式”。
“魔术公式”表达如下:sin(arctan((arctan())))vhY y Sy D C Bx E Bx Bx x X S =+=--=+其中,Y 表示侧向力、纵向力或回正力矩,X 表示侧偏角a 或滑移率s 。
现以侧向力为例说明公式中各系数的意义。
式中D --峰值因子,表示曲线的最大值B C D ××--侧偏角趋于零时轮胎的侧偏刚度,曲线中表示原点的斜率E --曲线形态因子,决定曲线最大值附近的形状C --决定曲线的形状,即曲线是像侧向力、纵向力还是回正力矩h S --水平方向漂移v S --垂直方向漂移除C 外,“魔术公式”中的参数都是垂直载荷和侧倾角g 的函数。
以下为轮胎纵向动力学特性在MA TLAB中的具体实现212x z zD a F a F =+1.65x C=2678x zz E a F a F a =++5234()///za F x z z x x B a F a F e C D =+52342122678sin(arctan((arctan())))()///1.65zx x x x x x x a F x z z x xx xz zxzz F D C B E B B B a F a F e C D C D a F a F E a F a F a k k k =--=+==+=++sin(arctan((arctan())))(arctan((arctan())))cos(arctan((arctan())))x xx x x x x z zx x x x xxxxxxxzdF dD C B E B B dF dF d B E B B D C B E B B CdF k k k k k k k k k =--+----2(arctan((arctan())))(arctan())1((arctan()))1((arctan()))x x x x z x x x x x x xx x x x z z z d B E B B dF dB dE d B B B B E B E B B dFdF dF k k k k k k k k k k k --=----+--222(arctan())()11()1()xx xxxx zz x z x z d B B dB dB B dB dF dF B dF B dFk k k k k k k k -=-=++ 555522343422234345(()///)()///(()///)(()///)zzzza F a F xzzx x z z xxz zza F a F x z z x x z z x x zdBd a F a F eC D d a F a F eC D dF dF dF dD a F a F eC D a F a F eC D a dF ++==-+-+sin(arctan((arctan())))x x x x x x x F D C B E B B k k k =--22cos(arctan((arctan())))(())1()1((arctan())x xxxxxxxxxxxxx x x x B D C BE BB C B E B dF B d B E B B kkkk kk k k ----+=+--车辆防抱死制动系统的控制技术研究车辆防抱死制动系统的控制技术研究 东大,侯光钰,张为公东大,侯光钰,张为公2.3.1 H.B.Pacejka 的魔术公式的魔术公式Pacejka 的“魔术公式”是汽车操纵动力学研究中应用比较广泛的轮胎力学模型,它用特殊的正弦函数建立轮胎的纵向力、横向力和回正力矩的函数表达式。
车辆行驶动力学模块计算车辆实际行驶过程中车辆行驶阻力,该阻力由 滚动阻力、空气阻力、加速阻力及坡度阻力四部分组成。
车辆行驶阻力经过车轮半径r 、主减速器传动比i0及变速器传动比ig 变换,得到对电机的需 求转矩。
1.滚动阻力由轮胎的弹性迟滞损失产生:f F W f =g式中:f F 为滚动阻力,N ;f 为滚动阻力系数;W 为车轮负荷,N 。
2.空气阻力指汽车直线行驶时收到的空气作用力在车辆行驶方向上的分力:212w D r F C A u ρ= 式中:w F 为空气阻力,N ;D C 为空气阻力系数;A 为车辆行驶方向的迎风面积,m2;ρ为空气密度,常取1.225824N s m -g g ;r u 为空气相对车辆的运动速度,m/s 。
x f w i j F F F F F =+++ 2221 1.2258=2 3.621.15D r r W D r r C A u F C A u ⨯⨯= 3.坡度阻力为车辆重力在平行于坡道方向上的分力:i sin tan F G G G i αα=≈=g g g式中:i F 为坡度阻力,N ;G 为整车重力,N ;α为坡道角度,rad ;i 为道路坡度。
4.加速阻力,为车辆加速/减速行驶时的惯性力:j =m du F dtδg g 式中:j F 为加速阻力,N ;m 为汽车质量,kg ;du dt为汽车行驶加速度,m/s2;δ为计入旋转质量惯性力矩后的汽车旋转质量换算系数。
5.车辆传动系到驱动轮的输出转矩柴油机输出转矩经过主减速器、变速器后到达车辆的驱动轮,然后由驱动轮车辆前进。
从柴油机到车辆驱动轮的输出转矩经过下式:0j e g T T T i i η=g g g式中:j T :车辆驱动轮端转矩,N m g ;e T : 柴油机曲轴输出有效转矩,N m g ;g i :变速器传送比;0i :主减速传动比;T η:传动系机械效率。
6.车辆行驶平衡方程假定车辆为后轮驱动,则其行驶平衡方程:x f w i j F F F F F =+++式中:x F :地面作用于车辆驱动轮的切向反向作用力,N 。
一、动力学的发展过程分为三个阶段:阶段一(20世纪30年代)1.对车辆动态性能的经验性的观察2.开始注意到车轮摆振的问题3.认识到车辆舒适性是车辆性能的一个重要方面阶段二(30年代—50年代)1.了解了简单的轮胎力学,给出了轮胎侧偏角的定义2.定义不足转向和过度转向3.建立了简单的两自由度操纵动力学方程4.开展了行驶平顺性研究,建立了K2实验台,5.引入前独立悬架阶段三(1952年以后)1.通过试验结果和建模,加深了对轮胎特性的了解2.在两自由度操纵模型的基础上,建立了包括侧倾的三自由度操纵动力学方程3.扩展了对操纵动力学的分析,包括稳定性和转向响应特性分析4.开始采用随机振动理论对行驶平顺性进行性能预测二、1.定义:汽车系统动力学就是把汽车看作是一个动态系统,对其行为进行研究,讨论其数学模型和响应。
2.目的:是研究汽车受的力及其与汽车运动之间的相互关系,找出汽车主要性能的内在规律和联系,提出汽车设计参数选取的原则和依据动力学:包括一切与车辆运动系统有关的方面,包括轮胎力学、驱动特性(动力性能)、制动特性、空气力学特性、操纵稳定性、平顺性、驾驶员—汽车—环境闭环系统特性等内容。
而最核心的是行驶动力学(平顺性)和操纵动力学(操纵稳定性)两大领域。
3.重要性:①阐述汽车运动规律的理论基础②汽车动态设计的必要手段③当今汽车技术发展的四大主题(安全、节能、降低污染、舒适)都与汽车动力学密切相关4.内容:研究内容范围很广,包括车辆纵向运动及其子系统的动力学响应,还有车辆垂向和横向动力学内容。
及行驶动力学和操纵动力学。
行驶动力学研究路面不平激励,悬架和轮胎垂向力引起的车身跳动和俯仰运动;操纵动力学研究车辆的操纵稳定性,主要是轮胎侧向力有关,引起的车辆侧滑、横摆、和侧倾运动。
三、汽车系统动力学的研究方法和理论基础1.研究方法把实际问题抽象并转化为简化的模型,即建模。
①物理模型:物理本质相同,形状尺寸有别模型的分类:②力学模型:经过简化后的物体实际受力模型③数学等效模型:动态行为的数学形式是相同的,可用等效的常系数微分方程来描述数学模型有理论建模和试验建模两类:a.理论建模是指从机械结构的设计图样出发,作出必要的假定和简化,根据力学原理建模。
汽车四轮转向四自由度动力学模型一、引言汽车作为现代交通工具的重要组成部分,其行驶稳定性和操控性能成为人们关注的焦点。
为了更好地理解汽车转向过程,研究者提出了汽车四轮转向四自由度动力学模型。
本文将对该模型进行介绍和分析。
二、汽车四轮转向四自由度动力学模型汽车四轮转向四自由度动力学模型是一种理论框架,用于描述汽车在转向过程中的运动规律。
该模型将汽车视为一个具有四个自由度的系统,包括纵向运动、横向运动、横摆运动和侧滑运动。
1. 纵向运动自由度纵向运动自由度是指汽车在纵向方向上的运动。
它受到引擎输出的动力和制动系统的制动力的影响。
在转向过程中,纵向运动自由度的变化可以影响汽车的加速度和制动效果。
2. 横向运动自由度横向运动自由度是指汽车在横向方向上的运动。
它受到转向系统的影响,包括前轮转向角度和转向系统的响应特性。
横向运动自由度的变化会影响汽车的横向加速度和侧向稳定性。
3. 横摆运动自由度横摆运动自由度是指汽车绕垂直轴线旋转的运动。
它受到转向系统和车身结构的影响,包括转向系统的转向角速度和车身的转动惯量。
横摆运动自由度的变化会影响汽车的横摆角度和横摆稳定性。
4. 侧滑运动自由度侧滑运动自由度是指汽车的轮胎与地面之间的相对滑动。
它受到横向运动和横摆运动的影响,包括车轮滑动角度和侧向力的变化。
侧滑运动自由度的变化会影响汽车的侧向力和侧滑稳定性。
三、应用与研究进展汽车四轮转向四自由度动力学模型在汽车工程领域具有广泛的应用价值。
它可以用于汽车设计和操控性能评估,帮助工程师改进汽车的转向系统和悬挂系统,提高汽车的稳定性和操控性能。
研究者们在汽车四轮转向四自由度动力学模型的基础上进行了许多深入的研究。
他们通过理论模拟和实验验证,对汽车转向过程中的动力学特性进行了深入分析,为汽车操控性能的提升提供了重要的理论支持。
随着自动驾驶技术的发展,汽车四轮转向四自由度动力学模型也得到了进一步的应用。
研究者们通过建立更加精确的模型,优化汽车的自动驾驶算法,提高汽车的驾驶安全性和舒适性。
汽车横向动力学模型推导过程
汽车横向动力学模型是研究汽车在行驶过程中的侧向运动特性的数学模型。
它通过描述车辆的侧向运动方程,来分析车辆在转弯、横向加速等情况下的行驶性能。
下面将从车辆的侧向力、横向加速度和车辆的稳定性等方面,来介绍汽车横向动力学模型的推导过程。
一、车辆的侧向力
车辆在转弯或横向加速时,轮胎与地面之间会产生侧向力。
侧向力可以分为横向力和法向力两个分量。
横向力是垂直于车辆的运动方向的力,它使车辆产生侧向加速度;法向力是垂直于地面的力,它支撑着车辆的重力。
二、横向加速度
横向加速度是描述车辆在横向运动时的加速度大小,它与车辆的侧向力和车辆的质量有关。
根据牛顿第二定律,车辆的横向加速度等于车辆的侧向力除以车辆的质量。
三、车辆的稳定性
车辆的稳定性是指车辆在转弯或横向加速时保持平衡的能力。
车辆的稳定性与车辆的质心高度、轴距、重心位置等因素有关。
当车辆的质心高度较低、轴距较大、重心位置较低时,车辆的稳定性较好。
四、车辆的横向动力学模型
汽车横向动力学模型是基于上述车辆的侧向力、横向加速度和车辆
的稳定性等因素建立起来的数学模型。
它可以描述车辆在转弯或横向加速时的运动特性。
汽车横向动力学模型是通过分析车辆的侧向力、横向加速度和车辆的稳定性等因素,来推导出车辆在转弯或横向加速时的运动特性的数学模型。
这个模型可以帮助我们更好地理解车辆的横向运动特性,为汽车设计和操控提供参考。
车辆动力学的建模与仿真研究作为一种机械装置,汽车的动态特性是其重要的性能之一。
而车辆动力学的研究就是评估车辆在不同路况、不同外界因素的影响下运动过程所表现出来的物理特征,并进一步探究车辆的操纵性、稳定性、安全性等方面的问题。
本文将介绍车辆动力学建模与仿真的基本概念及方法。
1. 车辆动力学模型车辆动力学模型是指描述汽车在运动过程中受到的外界力和热力学效应的一组数学方程,可以通过对不同因素如路况、车速、气温影响的分析,进行预测汽车在特定情况下的行驶特性。
一般情况下,车辆动力学模型包括整车模型、轮胎模型和路面模型三部分。
1.1 整车模型整车模型是车辆动力学模型的基础,主要包括车辆质量、发动机参数、车辆动力学变量等。
其中,车辆重量、车轮半径等物理量是最基本的整车模型参数。
此外,车辆的悬挂系统、转向系统和传动系统也可以在整车模型中考虑,以使模拟效果更为精确。
1.2 轮胎模型轮胎模型描述了轮胎在地面上所受的力和变形等特性。
轮胎的物理参数不同,对车速、车辆稳定性、制动距离等方面的影响也不同。
轮胎模型的建立主要考虑轮胎的纵向力、侧向力和滚转阻力等因素。
1.3 路面模型路面模型描述了车辆在路面上所受的阻力和摩擦等特性。
道路的不同纹理和材质对于车辆运动状态的影响是十分显著的。
路面模型的建立不仅需要考虑路面形状、材质等因素,还需要考虑气温、降雨等实际环境影响因素。
2. 车辆动力学仿真车辆动力学仿真是指利用计算机软件对车辆动力学模型进行算法模拟,以预测车辆在运行过程中的动态特性。
车辆动力学仿真是一种非常重要的手段,它可以用于评估车辆的操纵稳定性、驾驶员的驾驶技能水平、车辆零部件的设计优化等方面。
车辆动力学仿真的流程如下:第一步,选择车辆动力学模型、配备路面模型,设定仿真环境参数和运行路线,确定模拟致动方式。
第二步,设定车辆初始化信息,包括车速、转向角、初始位置等实际情况下的信息。
第三步,对车辆整车、轮胎和路面进行建模和仿真,并预测车辆在运动过程中的动态特性和行驶轨迹等。