汽车断开式转向梯形机构的优化设计_张立国
- 格式:pdf
- 大小:510.12 KB
- 文档页数:3
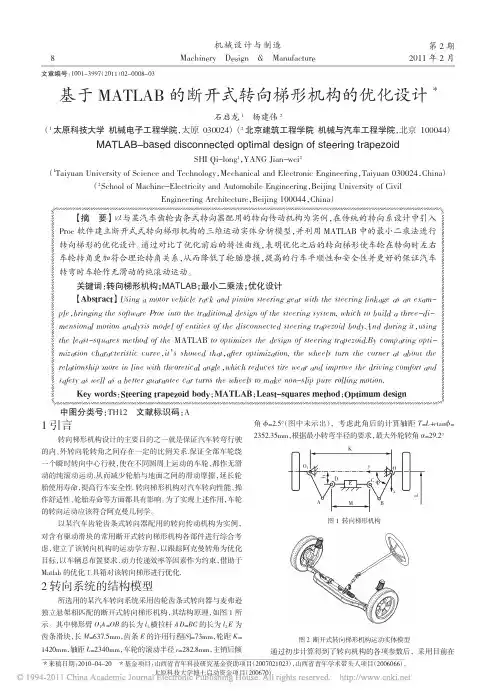
10.16638/ki.1671-7988.2020.05.027分段式转向梯形断开点的优化设计王成玲,刘富强,张勇,李玉(中国北方车辆研究所,北京100072)摘要:文章建立了某轮式车辆的前独立悬架和转向系统的参数化模型,阐述了分段式梯形断开点设计需要遵循的两点原则,分析了断开点三个方向坐标对阿克曼转向特性以及车轮跳动过程中前束角变化的影响,以实际外轮转角与理论外轮转角差值最小以及前束角变化最小为优化目标,对断开点位置进行了优化分析。
研究结果表明,断开点坐标的优化可以改善车辆转向特性,同时提高转向系统与悬架系统的运动协调性,为轮式车辆转向梯形的设计提出了较为合理的优化方案。
关键词:转向梯形;断开点;优化设计中图分类号:U461.6 文献标识码:A 文章编号:1671-7988(2020)05-93-03Optimization Design of Splitting Point of Steering TrapeziumWang Chengling, Liu Fuqiang, Zhang Yong, Li Yu( China North Vehicle Research Institute, Beijing 100072 )Abstract:The parametric analysis model of the suspension and steering system of certain wheeled vehicle has been established. Two design principle for Splitting Point of steering trapezium has been expounded. The effect of splitting point on Ackerman steering characteristics and toe angle has been studied. Taking minimum deviation between actual wheel turning angle from the angle and theoretical turning angle, the minimum variation of the toe angle as the optimal object, Optimization Design of Splitting Point has been studied. The results indicated that, the wheeled vehicle steering characteri -stics and the correspond between steering system and suspension has been improved by Optimization Design of Splitting Point. A reasonable optimization program for the optimize and design of vehicle is proposed in this paper.Keywords: Steering trapezium; Splitting point; Optimization designCLC NO.: U461.6 Document Code: A Article ID: 1671-7988(2020)05-93-03引言轮式车辆分段式转向梯形机构断开点的确定是转向梯形设计的难点[1-3]。
附件一毕业设计任务书设计(论文)题目FSAE赛车转向系统设计及性能分析学院名称汽车与交通工程学院专业(班级)车辆工程姓名(学号)胡嗣林指导教师张代胜系(教研室)负责人卢剑伟一、毕业设计(论文)的主要内容及要求(任务及背景、工具环境、成果形式、着重培养的能力)背景:中国汽车工业已处于大国地位,但还不是强国。
从制造业大国迈向产业强国已成为中国汽车人的首要目标,而人才的培养是实现产业强国目标的基础保障之一。
中国大学生方程式汽车大赛(以下简称"FSAE")是中国汽车工程学会及其合作会员单位,在学习和总结美、日、德等国家相关经验的基础上,结合中国国情,精心打造的一项全新赛事。
FSAE活动由各高等院校汽车工程或与汽车相关专业的在校学生组队参加。
FSAE要求各参赛队按照赛事规则和赛车制造标准,自行设计和制造方程式类型的小型单人座休闲赛车,并携该车参加全部或部分赛事环节。
比赛过程中,参赛队不仅要阐述设计理念,还要由评审裁判对该车进行若干项性能测试项目。
在比赛过程中,参赛队员能充分将所学的理论知识运用于实践中。
同时,还学习到组织管理、市场营销、物流运输、汽车运动等多方面知识,培养了良好的人际沟通能力和团队合作精神,成为符合社会需求的全面人才。
大学生方程式赛车活动将以院校为单位组织学生参与,赛事组织的目的主要有:一是重点培养学生的设计、制造能力、成本控制能力和团队沟通协作能力,使学生能够尽快适应企业需求,为企业挑选优秀适用人才提供平台;二是通过活动创造学术竞争氛围,为院校间提供交流平台,进而推动学科建设的提升;大赛在提高和检验汽车行业院校学生的综合素质,为汽车工业健康、快速和可持续发展积蓄人才,增进产、学、研三方的交流与互动合作等方面具有十分广泛的意义。
任务:调研国内外赛车转向系统结构及原理,遵循FSAE竞赛规则完成赛车转向系统设计,转向梯形优化,系统建模与转向性能分析。
工具环境:CATIA/UG AutoCAD ADAMS Visio MATLAB Office办公软件等成果形式:①翻译相关外文文献不少于5000字②优化设计说明书一份③赛车转向系统三维模型一份能力培养:培养和锻炼学生搜集相关资料,综合运用所学汽车设计知识解决实际问题的能力、提高学生软件应用能力、独立完成赛车转向系统设计及相关问题的能力,为从事本专业有关工作打下坚实基础。
矿用自卸车断开式转向梯形机构影响参数分析摘要|以某矿用自卸车转向梯形机构断裂为例,从几何结构出发,推导出左右转向轮实际角度关系。
详细分析了断裂式转向梯形机构的影响因素对转向盘转角误差曲线的影响规律,揭示了转向梯形机构设计过程中需要优化的关键参数。
影响左右方向盘实际角度关系的参数有:主销中心距K、梯形臂a臂长、梯形底角、铰链点G与前轮轴的距离s、铰链点G与连接线C、D的距离h,分析结果表明:当H、a、E、s四个值变化量相同时,方向盘转角误差变化曲线由大到小的影响程度为H、E、a、s值,s值的变化对方向盘转角影响不大误差变化曲线。
θ值的变化对方向盘转角误差曲线的影响最大。
关键词:断开式转向梯形;轮转角误差;优化设计转向梯形机构设计的主要任务之一是根据给定的条件,通过选择相关参数来设计转向梯形机构。
梯形是为了保证车辆转弯时内外方向盘角度有一定的比例关系,以保证所有的车轮都绕着一个瞬时的转向中心运动,使在不同圆周上运动的车轮做纯滚动运动而不打滑,从而减小车轮与地面之间的滑动摩擦,延长轮胎的使用寿命,提高行车安全性[1]。
然而,受转向梯形机构特性的限制,在所有可行的转向角范围内,实际转向机构的转向角与理论转向曲线的关系曲线并不完全一致。
因此,优化方法只能使两者之间的差异(角度误差)最小化,并在整个转向角范围内合理分配[2]。
在矿用自卸车前轮采用独立悬架的情况下,要求一侧方向盘的上下跳动不影响另一侧方向盘的运动,转向梯形必须采用断开式梯形机构[3]。
在实际应用中,不同的模型具有不同的梯形结构,其影响因素也不同。
以某矿用自卸车断裂式转向梯形机构为例,根据四连杆的几何关系,推导出了左右转向轮的实际角度关系,分析了影响方向盘转角误差变化曲线的因素。
1转向机构的主要结构矿用自卸车转向机构由转向臂、转向横拉杆、转向摇臂和转向液压缸组成。
直线行驶时,转向液压缸两个腔室的油压相等。
左转向时,高压油进入左转向液压缸有杆腔和右转向液压缸无杆腔;右转向时,高压油进入左转向液压缸无杆腔和右转向液压缸杆腔转向液压缸在高压油的推动下使车轮转动。
整体式转向梯形机构的优化设计随着机械设备的不断发展,对于机构的优化设计也变得越来越重要。
其中,整体式转向梯形机构是一种常见的机构类型,它在工业领域中具有重要的应用价值。
本文将探讨整体式转向梯形机构的优化设计。
整体式转向梯形机构是一种通过摆动约束框架来实现转向功能的机构。
目前,其主要应用领域为车辆转向系统。
通常情况下,该机构由主动轮、从动轮、转向架以及梯形连杆等部件组成。
其中,主动轮和从动轮通过梯形连杆相互连接,转向架则通过约束框架连接至主动轮和从动轮上,以实现车轮的转向功能。
整体式转向梯形机构的优化设计主要从以下几个方面展开:首先,对于梯形连杆的设计要求。
梯形连杆是整个机构的核心部件,其尺寸和形状对机构的性能起着至关重要的作用。
因此,在进行设计时,应根据机构的具体使用环境和转向要求,合理确定梯形连杆的尺寸和形状,以保证机构的工作稳定性和可靠性。
其次,对于转向架的设计要求。
转向架主要起到连接主动轮和从动轮的作用。
在优化设计中,应考虑到转向架的稳定性、刚度以及连接方式等因素,以确保转向架的性能达到要求。
再次,对于摆动约束框架的设计要求。
摆动约束框架用于约束转向架的转向运动,使车轮能够良好的适应路面的起伏和承受各种路况下的压力。
因此,在设计时,应考虑到摆动约束框架所承受的载荷和力矩的大小,以提高机构的适应性和稳定性。
最后,对于轮胎的选择要求。
整体式转向梯形机构的性能也受到轮胎的影响,因此,在进行优化设计时,应选择具有优良性能的轮胎,以提高车辆的使用寿命和行驶安全性。
综上所述,整体式转向梯形机构的优化设计应从多个方面展开,在具体应用中,根据不同情况灵活调整优化方案。
相信通过更加精细的优化,整体式转向梯形机构将能更好地满足工业生产和社会发展的需求,为推动机械设备的高质量发展做出更大的贡献。
数据分析是对大量数据进行分析和解释的过程,以发现潜在的模式、预测趋势或寻找关联性。
在现代社会,数据分析已经成为各个领域的重要部分。
汽车转向梯形机构图解解析(总6页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除轮式车辆转向梯形结构的图解解析常州工业技术学院钨华芝常州市政工程管理处魏晓静摘要介绍几种简单实用的车辆转向梯形结构的图解解析设计法。
通过事先设定内、外转向轮实际特性曲线与理论特性的交点位置来控制转角偏差的方法,选择转向梯形机构参数,可以大大减少图次数,提高工作效率,减小转角误差。
关键词:转向梯形机构解析图解1 引言轮式车辆一般都是依靠转向车轮偏转一个角度来实现转弯或曲线行驶。
转向是的基本要求是保证所有车轮滚动而不发生滑动,这一要求通常由平面四杆机构来达到。
传统的设计都采用图解转向梯形的方法。
这种方法需要按经验数据选择机构的几何参数,然后作图校核该梯形机构在运动过程中转向轮的转角偏差是否大于允许偏差,若大于允许偏差,则重新选择或调整几何参数,再校核图,直至转角偏转小于允许偏差为止。
这实际上是一种试凑的方法,带有较大的盲目性,工作量大。
随着计算机的发展,解析法得到了较好的应用,但是传统的图解法仍有它直观、方便的优点,因此仍然被工程设计人员广泛采用。
本文介绍一种简单高效且实用的图解解析设计法,可以大大减少作图校核的次数,提高工作效率。
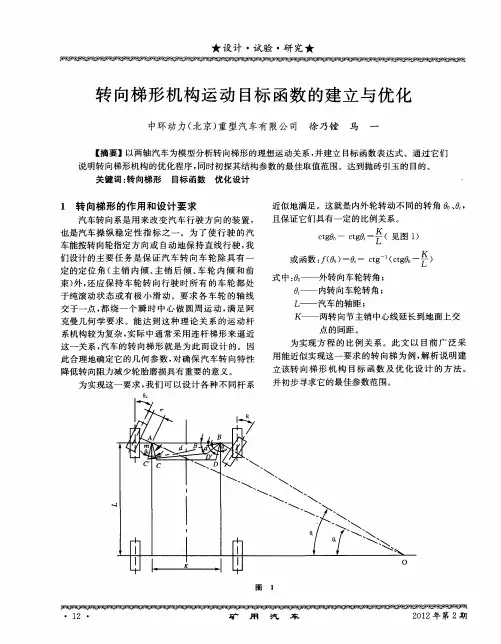
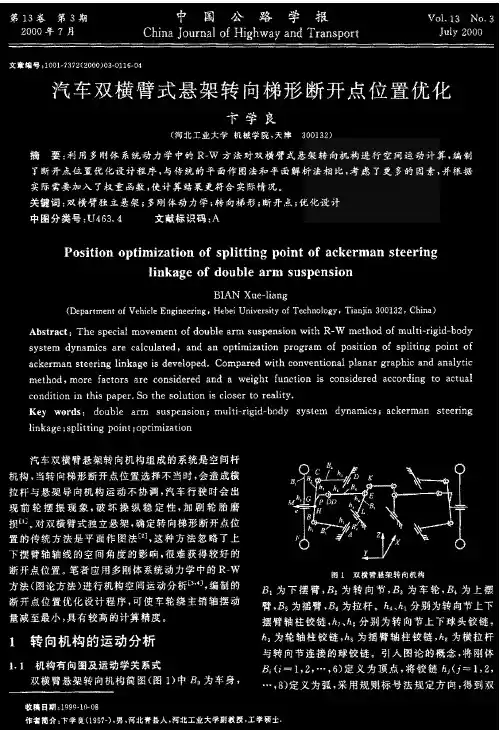
2 转向理论特性机动车辆或装卸搬运车辆的转向大多采用双轴线式转向方式,见图1。
为了满足纯滚动条件,转向时所有车轮必须以不同的半径围绕同一转向中心滚动,各个车轮的轴线交于瞬时转向中心O点。
虽然两个转向轮偏转的角度不同,但是两个转角之间应满足下列几何关系:ctg-ctga=M/L (1)式中 -外轮转角 a-内轮转角 M-转向轴两主销中心距 L-车辆前后轴轴距为了满足运动学上的这一几何关系,一般都是通过设计转向梯形机构来实现的。
式(1)称为转向理论特性。
3 转向梯形的图解设计及其转角误差转向梯形四杆机构中,固定件长度(两主销中心距)M是由车辆总体设计给出的,两梯形臂长相等。
汽车断开式转向梯形机构的优化设计1. 断开式转向梯形数学模型推导 理想的左右转向轮转角关系图1为汽车前轮转向示意图。
为了避免在汽车转向时产生的路面对汽车行驶的附加阻力和轮胎磨损过快,要求转向系统即可能保证在汽车转向时,所有的车轮均作纯滚动。
显然,这只有在所有车轮的轴线都相交于一点时方能实现。
此交点被称为转向中心。
如图所示,汽车左转弯时,内侧转向轮转角α应大于外侧车轮的转角β。
当车轮被视为绝对刚体的假设条件下,左右转向轮转角α和β应满足Ackermann 转向几何学要求,如式(1)所示。
LB-=βαcot cot (1)其中:α-内侧转向轮转角; β-外侧转向轮转角;B -两侧主销轴线与地面相交点之间的距离; L -汽车前后轴距; R -转弯半径。
根据式(1)可得理想的右轮转角,如式(2)。
0tan arctan 1tan BLαβα=+⨯(2)同理,当汽车右转向时,Ackermann 转角关系如式(3)所示。
LB+=βαcot cot (3)根据式(3)可得理想的右轮转角,如式4所示。
0tan arctan1tan BLαβα=-⨯(4)实际的左右转向轮转角关系图2是一种含有驱动滑块的常用断开式转向梯形机构。
轮齿条转向机构将方向盘的旋转运动转化成齿条(滑块)的直线运动,继而驱动转向梯形机构实现左右前轮转向。
vαββαBLR图1 汽车转向示意图图2 由齿轮齿条转向机驱动的断开式转向梯形机构图中:1L -转向机齿条左右球铰中心的距离; 2L -左右横拉杆的长度; 3L -左右转向节臂的长度; w L -车轮中心至转向主销的距离;1S -转向齿条从中心位置向左的位移量; 2S -转向齿条从中心位置向左的位移量;y -转向齿条左右球铰中心连线与左右转向主销中心连线之偏距,图示位置取正值,反之取负值; 0S -直线行驶时,转向齿条左球铰中心和左转向主销的水平距离;0α-转向节臂与汽车纵轴线的夹角。
运用余弦定理和三角函数变换公式,经推导可得:222223cos cos()2()Cy S A B C AOB BOY L S y α--+-=∠+∠=+A 点的坐标值为:2222222222()2()C S y A B C BXa y S C y S A B C Ya y S ⎧⨯-⨯+-=⎪⎪⨯+⎨⨯+⨯+-⎪=⎪⨯+⎩其中:32A L S =-⨯,32B L y =-⨯,222223C L L y S =---;S -表示转向齿条左球铰中心和左转向主销中心的实际距离, 对于直线行驶时,0S S =;转向时,对于左转向轮:0S S S =-右转向轮:0S S S =+。