《现代控制理论基础》ch2第二章线性控制系统的运动分析
- 格式:ppt
- 大小:920.00 KB
- 文档页数:43
《现代控制理论基础》课程教学大纲课程编号:课程名称:现代控制理论英文名称: Modern Control Theory课程性质: 考试学时: 42学时(讲授36学时+6学时实验)适用对象: 工业自动化先修课程:自动控制理论,线性代数,工程数学一、编写说明(一)本课程的性质、地位和作用现代控制理论是自动化专业的主干技术基础课,它是在经典控制理论的基础上建立和发展起来的。
本课程是以状态空间理论为核心,对动态系统进行分析和研究。
它不但可以解决单变量线性定常系统,还可以解决多变量、时变、非线性系统的问题。
通过本门课程的学习,使学生掌握线性控制系统的状态空间描述,能够对线性系统的几种模型进行互相转化; 掌握线性控制系统的运动规律及连续系统的离散化;熟悉线性控制系统的能控性与能观测性概念及其判定准则;了解控制系统的李亚普诺夫稳定性理论; 掌握线性控制系统的状态反馈与状态观测器的设计方法。
通过对本课程的学习,要求学生系统地获得现代控制理论的基本知识,切实掌握所涉及的基本概念、基本理论和基本方法,为后继课程的学习奠定良好的理论基础.(二)教学基本要求1. 掌握现代控制理论的基本知识及其分析方法,能够用状态空间表达式来描述系统,并根据系统的微分方程建立其状态空间表达式的方法。
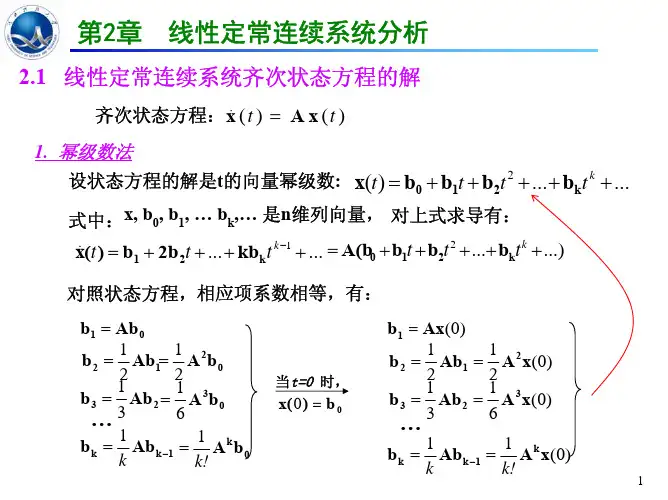
2. 掌握系统特征值的求取方法,掌握线性定常系统非齐次方程的解和线性时变系统的解的求取方法,以及离散时间系统状态方程的两种解法。
3. 掌握能控性、能观性的定义及各自的判别准则。
4.掌握用李雅普诺夫第一法和第二法分析系统的稳定性的方法。
5. 对线性系统理论的新发展有所了解。
6. 为学生进一步的学习打下必要的基础。
(三)课程教学方法与手段以课堂讲授为主,辅以习题、实验等环节。
(四)实践环节通过计算机仿真,主要运用Matlab软件使学生能初步掌握MATLAB工具包,并用它在计算机环境中进行控制‘实验’,对控制系统进行分析与综合,以提高学生的系统分析和综合能力。
《现代控制理论》课程教学大纲课程名称:现代控制理论课程类别:任意选修课适用专业:电子信息工程考核方式:考查总学时、学分:24学时1.5学分一、课程性质、教学目标《现代控制理论》是在“古典控制理论”的基础上,基于“线性代数”理论发展起来的一种自动控制系统性能分析与设计的新方法。
它由“古典控制理论”中的对单输入单输出系统的描述过渡到对多输入多输出系统的描述、由“古典控制理论”中对系统的外部性能分析过渡到内部性能分析、由“古典控制理论”中便于手工求解的数学模型过渡到便于计算机求解的数学模型。
为学生后续深造的课程《线性系统理论及应用》、《智能控制系统及应用》的学习打下必要的理论知识和实践基础。
其具体的课程教学目标为:课程教学目标1:掌握控制系统数学模型含义,系统数学模型的类型及相互关系,并能够建立常用线性系统的数学模型。
课程教学目标2:掌握线性控制系统状态方程的求解方法。
课程教学目标3:掌握控制系统的能控性和能观测性判据,并利用判据判断系统的能控性和能观测性。
通过本课程的学习,使学生掌握有关运用状态空间分析法定量和定性分析及综合控制系统的基本理论、基本方法,为学习后续课程打下基础。
三、先修课程高等数学、大学物理、电路分析、模拟电路、数字电路、高频电路、信号与系统、线性代数、自动控制原理。
四、课程教学重、难点教学重点:控制系统数学模型的建立,线性控制系统的运动能控性与能观测性和稳定性分析,线性定常系统的综合;教学难点:线性定常系统的综合。
五、课程教学方法与教学手段教学方法:讲授式教学方法、讨论式教学方法、导学式教学方法;教学手段:多媒体辅助教学。
六、课程教学内容绪论(1学时)1.教学内容(1) 自动控制与控制理论;(2) 控制理论发展简况;(3) 现代控制理论的基本内容;(4) 本课程的基本任务。
2.重、难点提示(1) 重点是控制理论的基本内容、本课程的基本任务;(2) 难点是控制理论的基本内容。
第一章控制系统的数学模型(5学时)1.教学内容(1) 状态空间表达式;(2) 由微分方程求状态空间表达式;(3) 传递函数矩阵;(4) 离散系统的数学描述;(5) 线性变换;(6) 组合系统的数学描述;(7) 利用MATLAB进行模型的转换。
《现代控制理论》课程教学大纲学分:3 理论学时:48适合专业:机械制造及自动化课程性质:学位课大纲执笔人:大纲审定人:课程编号:M041001一、说明1.课程的性质、地位和任务《现代控制理论》是机械制造及自动化专业研究生的学位课。
通过本课程的教学,应当使学生了解现代控制理论的体系结构,掌握线性控制系统的状态空间描述、时域分析与离散化等方法,掌握利用状态空间模型分析系统和校正系统及实现最优控制的方法。
2.课程教学基本要求先修课程:《高等数学》、《矩阵理论》、《普通物理》、《电路原理》、《电子技术》、《电机原理及拖动基础》、《自动控制原理》等。
本课程教学应力求使学生掌握现代控制理论的基本概念、系统分析与设计方法,重在提高学生提出问题、分析问题、解决问题的能力和创新意识。
讲授时应及时补充本学科的最新发展成果,使学生了解本学科的重要进展及发展动向。
本课程的教学包括课堂讲授、课外作业和仿真实验等,重点培养学生应用现代控制理论分析和设计控制系统的实际能力。
3.课程教学改革为解决授课学时少授课内容多的矛盾,在有限的教学时间里较好地完成授课任务,授课时应借助多媒体尽量做到突出重点、精讲多练,必要时组织学生进行课堂讨论,调动学生的学习主动性;适当设置一些MATLAB实践课时,提高学生的学习兴趣和拓宽知识面。
二、教学内容绪论(2学时)(1)控制理论的发展(2) 现代控制理论的基本内容学习要求:明确本课程的内容、性质和任务以及学习本课程的意义,了解控制理论的发展概况及现代控制理论的主要特点、内容和研究方法。
第一章控制系统的状态空间数学模型(9学时)(1)状态变量、状态空间表达式(2)系统的一般时域描述化为状态空间描述(3)系统的频域描述化为状态空间描述(4)根据状态变量图列写线性系统的状态空间描述(5)根据系统方框图导出状态空间描述(6)将状态方程化为规范形式学习要求:正确理解线性系统的状态空间数学描述的基本概念,熟练掌握状态空间的表达式,线性变换,线性定常系统状态方程的建立方法。