FPΣ高速脉冲输出功能(上)
- 格式:doc
- 大小:207.00 KB
- 文档页数:13
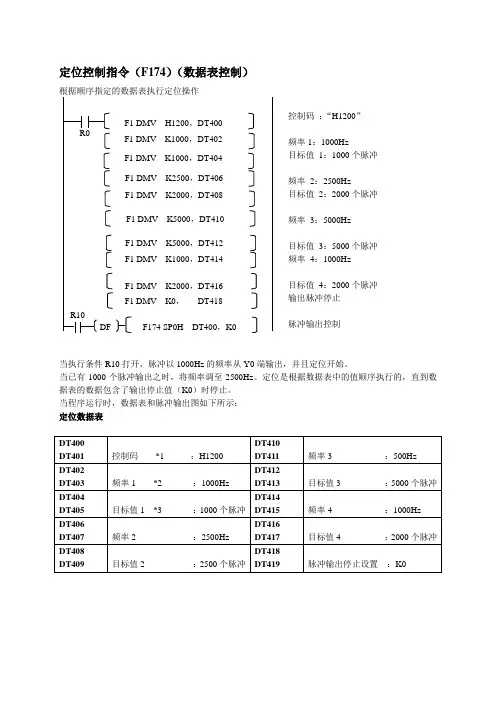
定位控制指令(F174)(数据表控制)当执行条件R10打开,脉冲以1000Hz 的频率从Y0端输出,并且定位开始。
当已有1000个脉冲输出之时,将频率调至2500Hz 。
定位是根据数据表中的值顺序执行的,直到数据表的数据包含了输出停止值(K0)时停止。
当程序运行时,数据表和脉冲输出图如下所示: 定位数据表(*2): 频率(Hz)“K 常数”1.5Hz到9.8kHz [K1 到K9800(单位:Hz)](接近9.8kHz的最大误差大约为-0.9kHz)*设定“K1”表示1.5Hz48Hz到100kHz[K48 到K100000(单位:Hz)](接近100kHz的最大误差大约为-3kHz)191Hz到100kHz[K191 到K100000(单位:Hz)](接近100kHz的最大误差大约为-0.8kHz)(*3): 目标值(K214783648—K214783647)设定的32位数据的目标值应该在下表所示范围之内。
脉冲输出图频率(速度)(Hz)500025001000高速计数器经过值(脉冲数)0 1000 3000 8000 10000开关:R10R903A(R903C)当指令F174(SP0H)的执行条件(开关)打开时,高速计数器控制标志R903A(R903C)打开,当经历值达到10000且脉冲输出停止时,R903A(R903C)关闭。
脉冲输出指令(F175)(直线插补)脉冲从X 轴(CH0)和Y 轴(CH2)输出,这样矢量速度就是初速度,值为500Hz ,最大速度为5000Hz ,加/减速时间为300ms ,控制两个轴的直线插补以达到目标位置。
当程序运行时,定位数据表和定位路径如下所示:定位路径Y轴(CH2)20005000X轴(CH0)(*2)矢量速度(初速度,最大速度)(Hz)(K常数)1.5Hz到1000kHz [K1到K100000]1.5Hz只用来表示0°或90°的角,并且用K1表示1.5Hz。

三菱PLC高速输出(1),初涉定位指令,脉冲输出PLSY的讲解。
对于伺服或步进电机使用的脉冲输出控制指令,需要根据不同功能选择需要的指令,三菱PLC中的高速脉冲输出指令主要有16位的PLSY、PLSR、PLSV,32的DPLSY、DPLSR、DPLSV,今天就来说说基本的PLSY指令的介绍。
1、三种指令(PLSY、PLSR、PLSV)的区别1)简单介绍下这几个的区别,PLSY是基本的脉冲输出,功能是发送指定频率和指定数量脉冲的指令;2)PLSR是带有加减速功能的脉冲输出指令,功能是发送指定频率和制动数量脉冲的指令,同时能指定从0到指定频率的时间或从指令频率到0的时间。
如果这个加减速时间设置为0则与PLSY指令一样;3)PLSV是输出带有旋转方向的可变速脉冲指令,功能是输出指定方向和指令频率的脉冲,它与PLSR区别是可在指令运行中改变频率,PLSR则是即使改变操作数运行中也不反映,在下一次指令驱动时更改内容有效。
2、PLSY指令说明PLSY指令说明其中S1是指定脉冲频率,S2是发送的脉冲数量,D是脉冲输出Y端子,其中16位指令PLSY的频率范围0~32676Hz,脉冲数量32676(2^15)P,32位指令S1脉冲频率采用基本单元0~100000Hz,采用高速输出适配器0~200000Hz,输出脉冲数量S2范围是0~2147483647(2^31)P。
脉冲输出端子目前FX3系列只支持Y0和Y1。
3、需掌握的相关软元件1)特殊辅助继电器M8029M8029是指令完成标志,意思就是指令发送完成后会置位ON状态,脉冲未发送完毕或者中断、停止则处于OFF状态,使用多个M8029需要注意其位置,一定将其放在监视指令的正下方:M8029放置位置下面我们在三菱FX3g型PLC中看下指令的使用,XY双轴采用PLSY指令,X轴频率200p/s,脉冲数量2000p,Y轴脉冲频率500p/s,脉冲数量2500p,可以算出,X轴10s完成,Y轴5s完成,下面观察M8029的变化:M8029的变化从上图看出,Y轴脉冲发送完成后,M8029闭合,但只用Y轴下方的M8029有输出M201,X轴没有,等到X轴脉冲指令完成,M200才闭合,所以在放置M8029标志一定要注意位置。
FP0高速脉冲输出功能FP0是松下公司推出的一款微型可编程控制器,具有高速脉冲输出功能。
高速脉冲输出是指在短时间内产生多个脉冲信号的功能,常用于控制步进电机、伺服电机、工控设备等。
下面将详细介绍FP0高速脉冲输出功能的特点和应用。
1.FP0高速脉冲输出的特点1.1高速性能:FP0高速脉冲输出支持最高100kHz的输出频率,能够满足大多数高速控制需求。
1.2多通道输出:FP0高速脉冲输出模块通常具有4路或8路输出通道,可以同时控制多个设备,提高系统的灵活性和控制能力。
1.3高精度:FP0高速脉冲输出能够实现微秒级的精确脉冲输出,保证了精准控制的需求。
1.4可编程性:FP0高速脉冲输出可以通过编程来控制输出频率、脉冲宽度、脉冲数量等参数,灵活适应不同的应用场景。
2.FP0高速脉冲输出的应用2.1步进电机控制:FP0高速脉冲输出能够精确控制步进电机的步进角度和转速,广泛应用于CNC机床、印刷设备、纺织设备等。
2.2伺服电机控制:FP0高速脉冲输出可以控制伺服电机的位置和速度,应用于机器人、数字仪表、自动化生产线等。
2.3工控设备:FP0高速脉冲输出可以用于控制各种工控设备,如输送带、分拣机、包装机等,实现精准的控制和调度功能。
3.FP0高速脉冲输出的编程实现3.1设置输出参数:包括输出通道、输出频率、脉冲宽度等参数的设置,一般通过特定的指令实现。
3.2编写运动控制程序:根据具体的应用需求,编写相应的运动控制程序,实现脉冲输出的逻辑和控制。
3.3监控和调试:通过监控输出信号,并进行相应的调试和优化,确保脉冲输出的准确性和稳定性。
4.FP0高速脉冲输出的优势相比于传统的脉冲输出方式,FP0高速脉冲输出具有以下优势:4.1灵活性:FP0高速脉冲输出可以通过编程实现各种复杂的控制逻辑和算法,满足不同的应用需求。
4.2精确性:FP0高速脉冲输出可以实现高精度的脉冲输出,保证了控制的准确性和稳定性。
4.3易扩展性:FP0高速脉冲输出模块可以和其他模块进行灵活组合,实现更复杂的控制功能。
19高速脉冲输出指令一高速脉冲输出功能是指在可编程序控制器的某些输出端产生高速脉冲,用来驱动负载实现精确控制。
这在运动控制中具有广泛应用。
使用高速脉冲输出功能时,PLC主机应选用晶体管输出型,以满足高速输出的频率要求。
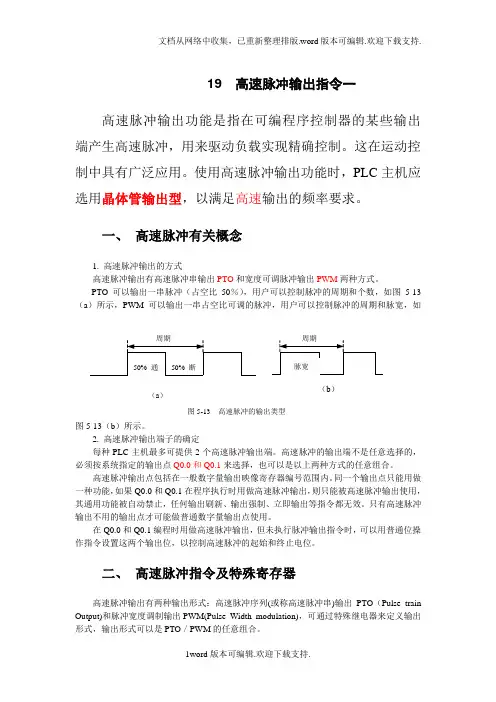
一、高速脉冲有关概念1. 高速脉冲输出的方式高速脉冲输出有高速脉冲串输出PTO和宽度可调脉冲输出PWM两种方式。
PTO可以输出一串脉冲(占空比50%),用户可以控制脉冲的周期和个数,如图5-13(a)所示,PWM可以输出一串占空比可调的脉冲,用户可以控制脉冲的周期和脉宽,如图5-13(b)所示。
2. 高速脉冲输出端子的确定每种PLC主机最多可提供2个高速脉冲输出端。
高速脉冲的输出端不是任意选择的,必须按系统指定的输出点Q0.0和Q0.1来选择,也可以是以上两种方式的任意组合。
高速脉冲输出点包括在一般数字量输出映像寄存器编号范围内。
同一个输出点只能用做一种功能,如果Q0.0和Q0.1在程序执行时用做高速脉冲输出,则只能被高速脉冲输出使用,其通用功能被自动禁止,任何输出刷新、输出强制、立即输出等指令都无效。
只有高速脉冲输出不用的输出点才可能做普通数字量输出点使用。
在Q0.0和Q0.1编程时用做高速脉冲输出,但未执行脉冲输出指令时,可以用普通位操作指令设置这两个输出位,以控制高速脉冲的起始和终止电位。
二、高速脉冲指令及特殊寄存器高速脉冲输出有两种输出形式:高速脉冲序列(或称高速脉冲串)输出PTO(Pulse train Output)和脉冲宽度调制输出PWM(Pulse Width modulation),可通过特殊继电器来定义输出形式,输出形式可以是PTO/PWM的任意组合。
1. LADSTL作用PLS Q0.X检测各个相关特殊继电器的状态,激活由控制位定义的脉冲操作,从Q0.0或Q0.1输出高速脉冲。
高速脉冲串输出PTO 和宽度可调脉冲输出PWM 都由PLS 指令激活输出。
2. 特殊标志寄存器每个高速脉冲发生器对应一定数量的特殊寄存器,这些寄存器包括控制字节寄存器、状态字节寄存器和参数数值寄存器。
最专业的PLC知识讲解:PLC高速脉冲输出指令基本指令和顺序控制指令是PLC最常用的指令,为了适应现代工业自动控制需要,PLC制造商开始逐步为PLC增加很多功能指令,功能指令使PLC具有强大的数据运算和特殊处理功能,从而大大扩展了PLC的使用范围。
S7-200 PLC 内部有两个高速脉冲发生器,通过设置可让它们产生占空比为50%、周期可调的方波脉冲(即PTO脉冲),或者产生占空比及周期均可调节的脉宽调制脉冲(即PWM脉冲)。
占空比是指高电平时间与周期时间的比值。
PTO脉冲和PWM脉冲如图1所示。
图1 PTO脉冲和PWM脉冲说明在使用脉冲发生器功能时,其产生的脉冲从Q0.0和Q0.1端子输出,当指定一个发生器输出端为Q0.0时,另一个发生器的输出端自动为Q0.1,若不使用脉冲发生器,这两个端子恢复普通端子功能。
要使用高速脉冲发生器功能,PLC应选择晶体管输出型,以满足高速输出要求。
一、指令说明高速脉冲输出指令说明如下:二、高速脉冲输出的控制字节、参数设置和状态位要让高速脉冲发生器产生合符要求的脉冲,须对其进行有关控制及参数设置,另外,通过读取其工作状态可触发需要的操作。
1.控制字节高速脉冲发生器的控制采用一个SM 控制字节(8位),用来设置脉冲输出类型(PTO或PWM)、脉冲时间单位等内容。
高速脉冲发生器的控制字节说明见表5-14,例如当SM67.6=0时,让Q0.0端子输出PTO脉冲;当SM77.3=1时,让Q0.1端子输出时间单位为ms的脉冲。
表1 速脉冲发生器的控制字节2.参数设置高速脉冲发生器采用SM存储器来设置脉冲的有关参数。
脉冲参数设置存储器说明见表2,例如SM67.3=1,SMW68=25,则将脉冲周期设为25ms。
表2 脉冲参数设置存储器3. 状态位高速脉冲发生器的状态采用SM位来显示,通过读取状态位信息可触发需要的操作。
高速脉冲发生器的状态位说明见表3,例如SM66.7=1表示Q0.0端子脉冲输出完成。

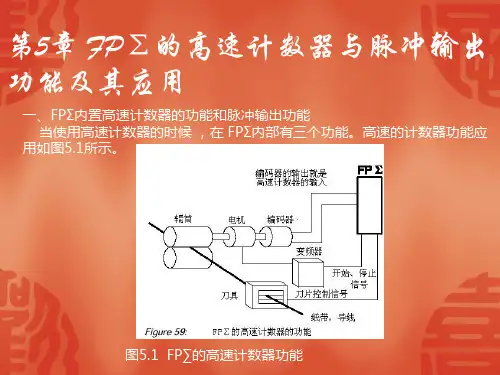
6.4 脉冲输出功能本章节是对有关FP∑输出功能作了介绍6.4.1 脉冲输出功能的概述用到的指令和控制器●利用FP∑的脉冲输出功能,可以控制脉冲串输入形式的电机驱动器,来实现定位控制。
●专用指令F171(SPDH)能够根据设置的初始速度、最大速度、加/减速时间以及目标值,自动输出所要求的脉冲,实现梯形升降速的定位控制。
●专用指令F171(SPDH)还能实现自动回原点功能。
●专用指令F172(PLSH),可以实现点动(JOG)的脉冲输出。
目标值也可以被设置,以便脉冲输出能在目标值匹配时停下来。
●专用指令F174(PL0H),能实现脉冲输出和数据表一致,以便定位控制依照数据表来工作。
●专用指令F175(SPSH),能实现线性插补控制。
通过指定合成速度,加/减速时间以及目标值,这条指令使用线性插补控制实现脉冲输出。
●专用指令F176(SPCH),能实现圆弧插补控制。
用户可以从两种形成圆弧的方法中选择其一。
一种是指定经过的位置,另一种是指定一个圆心位置。
通过指定不同的参数,脉冲使用圆弧插补实现输出。
注意:直线插补控制指令F175(SPSH)和圆弧插补控制指令F176(SPCH)只能和C32T2控制单元配合使用。
设置系统寄存器当使用脉冲输出功能时,应将相应通道的系统寄存器No.400和No.401设置为“不使用高速计数器”。
6.4.2 几种脉冲输出方式正/反向脉冲 输出方式在这种方法中,控制器使用双向脉冲工作,一个为正向旋转脉冲,另一个为反向旋转脉冲图84:FP ∑脉冲输出功能—CW/CCW 输出方式脉冲+方向 输出方式(正向:关/反向:开)在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转方向。
在这种模式下,当旋转方向信号为“关”的时候正向脉冲工作。
图85:FP ∑脉冲输出—脉冲+方向输出方式1脉冲+方向在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转方向。
在这种模式下,当旋转方向信号为“开”的时候正向脉冲工作。
6.4 脉冲输出功能
本章节是对有关FP∑输出功能作了介绍
6.4.1 脉冲输出功能的概述
用到的指令和控制器
●利用FP∑的脉冲输出功能,可以控制脉冲串输入形式的电机驱动器,来实现定位控制。
●专用指令F171(SPDH)能够根据设置的初始速度、最大速度、加/减速时间以及目标值,自动
输出所要求的脉冲,实现梯形升降速的定位控制。
●专用指令F171(SPDH)还能实现自动回原点功能。
●专用指令F172(PLSH),可以实现点动(JOG)的脉冲输出。
目标值也可以被设置,以便脉冲
输出能在目标值匹配时停下来。
●专用指令F174(PL0H),能实现脉冲输出和数据表一致,以便定位控制依照数据表来工作。
●专用指令F175(SPSH),能实现线性插补控制。
通过指定合成速度,加/减速时间以及目标值,
这条指令使用线性插补控制实现脉冲输出。
●专用指令F176(SPCH),能实现圆弧插补控制。
用户可以从两种形成圆弧的方法中选择其一。
一种是指定经过的位置,另一种是指定一个圆心位置。
通过指定不同的参数,脉冲使用圆弧插补实现输出。
注意:
直线插补控制指令F175(SPSH)和圆弧插补控制指令F176(SPCH)只能和C32T2控制单元配合使用。
设置系统寄存器
当使用脉冲输出功能时,应将相应通道的系统寄存器No.400和No.401设置为“不使用高速计数器”。
6.4.2 几种脉冲输出方式
正/反向脉冲 输出方式
在这种方法中,控制器使用双向脉冲工作,一个为正向旋转脉冲,
另一个为反向旋转脉冲
图84:FP ∑脉冲输出功能—CW/CCW 输出方式
脉冲+方向 输出方式(正向:关/反向:开)
在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转
方向。
在这种模式下,当旋转方向信号为“关”的时候正向脉冲工作。
图85:FP ∑脉冲输出—脉冲+方向输出方式1
脉冲+方向
在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转方向。
在这种模式下,当旋转方向信号为“开”的时候正向脉冲工作。
图86:FP ∑脉冲输出—脉冲+方向输出方式2
6.4.3 I/O 口分配
对于双冲输入的驱动器(对于正/反向脉冲输入方式)
:
● 对于“正向+反向的脉冲”双输出的触点作为一个脉冲输出使用。
●
脉冲输出点、方向输出点、以及原点输入点的I/O 分配,由所选定的通道来确定。
(参见书6-6上的详述表格。
)
设置控制编码F171(SPDH )指令为“正/反向脉冲”方式
单脉冲输入驱动器(脉冲+方向开关输入方式)
●
一个输出点用作单脉冲输出,而另一个用作方向输出;
● 脉冲输出点、方向输出点、以及原点输入点的I/O 分配,由所选定的通道来确定。
(参见书6-6上的详述表格。
)
●
原点接近输入端可以通过专门的数据寄存器“DT90052”的位设置来自由选择。
可以扩展到两个驱动系统的联接
6.4.4 控制模式说明
增量模式<相对值控制>
绝对模式<绝对值控制>
根据当前值和目标值的设置不同,输出脉冲(当前值与目标值之差为输出的脉冲数)。
回原点方式
●脉冲是连续输出的,直到执行指令F171(SPDH)使原点定位输入。
●为了在接近原点时对运动减速,使用接近原点输入对DT90052专用数据寄存器中相对应的位进
行设置为:OFF ON OFF。
●当返回原点动作执行完毕时,微分计数器清零输出。
点动方式
●当触发器因指令F172(PLSH)处于“开”状态时,脉冲从指定的通道输出。
同样,当指定的
目标值被获得时,脉冲输出将停止。
●脉冲方向输出和输出频率将根据指令F172(PLSH)来指定。
6.4.5 脉冲输出功能中用到的指令
定位控制指令(F171)(梯形速度控制)
根据指定的数据表可以进行自动的梯形速度控制。
从Y0输出端产生一个脉冲,设置初速度为500Hz ,最大速度为5000Hz ,加/减速时间为300ms ,10000个脉冲数的运动。
当程序运行时,定位数据表和脉冲输出图如下所示
定位数据表 脉冲输出图
(*2): 频率(Hz)“K 常数”
1.5Hz到9.8kHz [K1 到K9800(单位:Hz)](接近9.8kHz的最大误差大约为-0.9kHz)
*设定“K1”表示1.5Hz
48Hz到100kHz[K48 到K100000(单位:Hz)](接近100kHz的最大误差大约为-3kHz)191Hz到100kHz[K191 到K100000(单位:Hz)](接近100kHz的最大误差大约为-0.8kHz)(*3): 加减速时间(ms)“K 常数”
走30步:K30到K32767
走60步:K36到K32767
(*4): 目标值“K 常数”
K—2147483648 到K—21473647
图93:FP∑指令“F171”的控制码
定位控制指令(F171)(原点返回)根据指定的数据表执行原点返回。
设置初速度为100Hz,最大速度为2000Hz,加/
减速时间为150ms。
图
94:FP∑定位控制指令“F171”编程
当程序运行时,定位数据表和脉冲输出图如下所示
脉冲输出图(原点接近信号未用)脉冲输出图(原点接近信号已用)
150ms 150ms 150ms
图95:指令“F171”脉冲输出编程
1.5Hz到9.8kHz [K1 到K9800(单位:Hz)](接近9.8kHz的最大误差大约为-0.9kHz)
*设定“K1”表示1.5Hz
48Hz到100kHz[K48 到K100000(单位:Hz)](接近100kHz的最大误差大约为-3kHz)191Hz到100kHz[K191 到K100000(单位:Hz)](接近100kHz的最大误差大约为-0.8kHz)(*3): 加减速时间(ms)“K 常数”
走30步:K30到K32767
走60步:K36到K32767
(*4): 偏差计数器清零标志“K 常数”
0.5ms到100ms[K0到K100] 设置值和偏差(0.5ms或更小)
不使用或使用0.5ms时设置为K0。
如果写入的值超出偏差计数器清零标志的范围,在范围内取一个修正的值
图93:FP∑指令“F171”的控制码
提示技巧
回原点操作模式
使用FP∑回原点有两种操作模式,类型Ⅰ回原点和类型Ⅱ回原点。
类型Ⅰ回原点
无论是否有接近原点输入,无论减速是否发生还是完成,原点返回输入都是有效的。
在这种模式下,原点接近输入未用。
原点接近输入未用时当原点接近输入使用时
如何时候原点输入有效
原点在原点接近输入为减速时输入
类型Ⅱ回原点
在这种模式下,回原点输入只有在基于原点接近输入的减速完成之后才有效。
原点输入有效
图97:FP∑原点返回操作模式
脉冲输出指令(F172)(点动操作,目标值设置)
这条指令是用来进行点动操作的,当执行状态(开关)处于打开的时从期望输出得到一个脉冲,以此来进行点动操作。
的脉冲
当程序运行时,数据表和脉冲输出图如下所示。
数据表
脉冲输出图
XB (JOG 命令) ON
OFF
Y0(脉冲) 300Hz
0Hz
图99:FP ∑指令“F172”的脉冲输出图
(*2): 频率(Hz)“K 常数”
1.5Hz到9.8kHz [K1 到K9800(单位:Hz)](接近9.8kHz的最大误差大约为-0.9kHz)
*设定“K1”表示1.5Hz
48Hz到100kHz[K48 到K100000(单位:Hz)](接近100kHz的最大误差大约为-3kHz)191Hz到100kHz[K191 到K100000(单位:Hz)](接近100kHz的最大误差大约为-0.8kHz)(*3): 目标值(绝对值)(只能在2.0版本或其后的版本中指定)
这个值只有在设定的目标值符合停止模式时使用(惟独绝对值)。
按下图显示的设定范围指定目标值。
如果指定的目标值超出设定范围,输出的脉冲数将与设定的值不同。
在不计数模式下目标值设置将不起作用。
图100:FP∑指令“F172”的控制码
提示技巧
使用FP∑在执行点动进给时有两种操作模式,一种是没有指定目标值,另一种是当达到目标值时停止进给。
一般的点动进给(没有指定目标值的模式)
只要状态设置为“开”,脉冲就会按照数据表的状态设置输出。
数据表
脉冲输出图
XB ON
(JOG命令) OFF
300Hz
0Hz
达到目标值脉冲输出停止模式(只支持2.0版本或其后的版本)
使用FP∑(C32T2)的2.0版本或其后的版本,在执行点动时可以为目标值设置“达到目标值脉冲输出停止”的操作模式。
如下所示,控制码设置为此模式,然后在数据表中选定目标值。
数据表
脉冲输出图
XB
Y0
脉冲停止时目标。