FPΣ高速脉冲输出功能上
- 格式:doc
- 大小:159.00 KB
- 文档页数:13
6.4 脉冲输出功能本章节是对有关FP∑输出功能作了介绍6.4.1 脉冲输出功能的概述用到的指令和控制器●利用FP∑的脉冲输出功能,可以控制脉冲串输入形式的电机驱动器,来实现定位控制。
●专用指令F171(SPDH)能够根据设置的初始速度、最大速度、加/减速时间以及目标值,自动输出所要求的脉冲,实现梯形升降速的定位控制。
●专用指令F171(SPDH)还能实现自动回原点功能。
●专用指令F172(PLSH),可以实现点动(JOG)的脉冲输出。
目标值也可以被设置,以便脉冲输出能在目标值匹配时停下来。
●专用指令F174(PL0H),能实现脉冲输出和数据表一致,以便定位控制依照数据表来工作。
●专用指令F175(SPSH),能实现线性插补控制。
通过指定合成速度,加/减速时间以及目标值,这条指令使用线性插补控制实现脉冲输出。
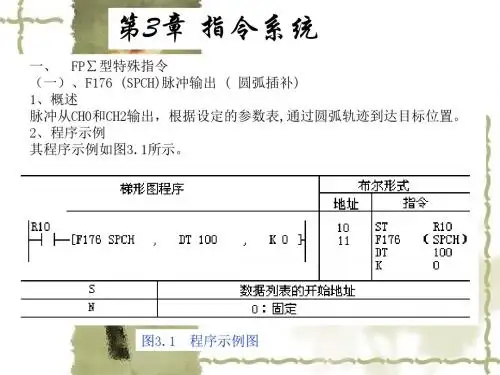
●专用指令F176(SPCH),能实现圆弧插补控制。
用户可以从两种形成圆弧的方法中选择其一。
一种是指定经过的位置,另一种是指定一个圆心位置。
通过指定不同的参数,脉冲使用圆弧插补实现输出。
注意:直线插补控制指令F175(SPSH)和圆弧插补控制指令F176(SPCH)只能和C32T2控制单元配合使用。
设置系统寄存器当使用脉冲输出功能时,应将相应通道的系统寄存器No.400和No.401设置为“不使用高速计数器”。
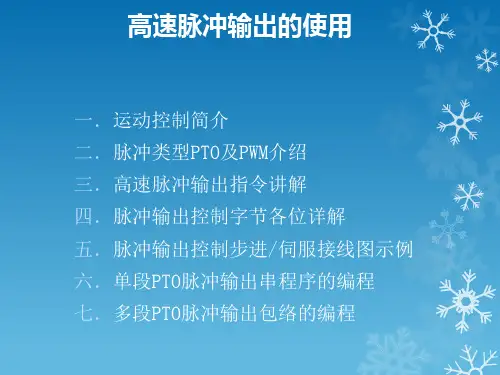
6.4.2 几种脉冲输出方式正/反向脉冲 输出方式在这种方法中,控制器使用双向脉冲工作,一个为正向旋转脉冲,另一个为反向旋转脉冲图84:FP ∑脉冲输出功能—CW/CCW 输出方式脉冲+方向 输出方式(正向:关/反向:开)在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转方向。
在这种模式下,当旋转方向信号为“关”的时候正向脉冲工作。
图85:FP ∑脉冲输出—脉冲+方向输出方式1脉冲+方向在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转方向。
在这种模式下,当旋转方向信号为“开”的时候正向脉冲工作。
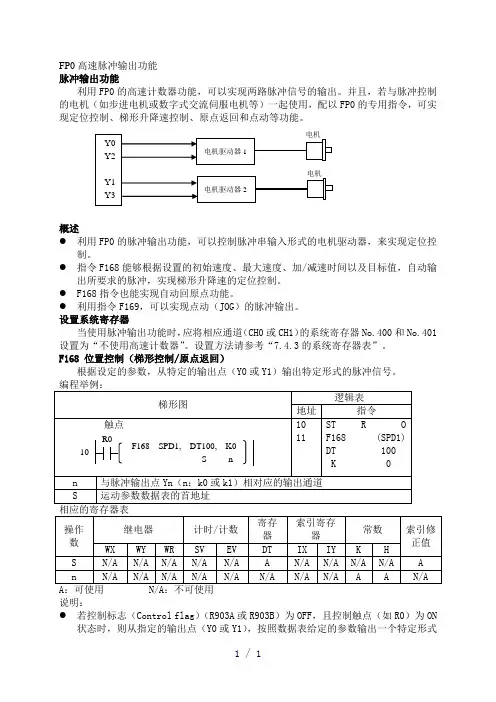
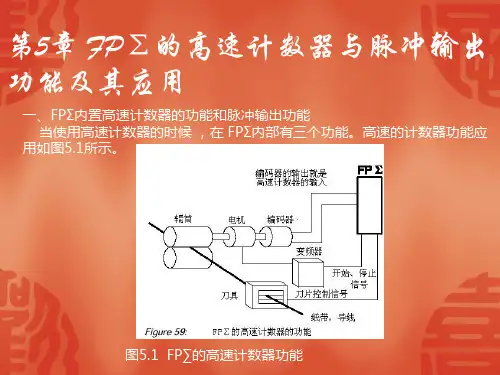
FP0高速脉冲输出功能脉冲输出功能利用FP0的高速计数器功能,可以实现两路脉冲信号的输出。
并且,若与脉冲控制的电机(如步进电机或数字式交流伺服电机等)一起使用,配以FP0的专用指令,可实现定位控制、梯形升降速控制、原点返回和点动等功能。
概述●利用FP0的脉冲输出功能,可以控制脉冲串输入形式的电机驱动器,来实现定位控制。
●指令F168能够根据设置的初始速度、最大速度、加/减速时间以及目标值,自动输出所要求的脉冲,实现梯形升降速的定位控制。
●F168指令也能实现自动回原点功能。
●利用指令F169,可以实现点动(JOG)的脉冲输出。
设置系统寄存器当使用脉冲输出功能时,应将相应通道(CH0或CH1)的系统寄存器No.400和No.401设置为“不使用高速计数器”。
设置方法请参考“7.4.3的系统寄存器表”。
F168 位置控制(梯形控制/原点返回)根据设定的参数,从特定的输出点(Y0或Y1)输出特定形式的脉冲信号。
说明:●若控制标志(Control flag)(R903A或R903B)为OFF,且控制触点(如R0)为ON状态时,则从指定的输出点(Y0或Y1),按照数据表给定的参数输出一个特定形式的脉冲串。
● 数据表用于指定位控运动的控制码、起始速度、最大速度、加速/减速时间或目标值等。
● 根据加/减速时间,输出频率从起始速度升到最大速度。
通道 控制标志 当前值 目标值 方向输出 原点接近原点输入CH0 R903A DT9044,9045 DT9046,9047 Y2 DT9052,bit2 X0CH1 R903B DT9048,9049 DT9050,9051 Y3 DT9052,bit6X1运行模式说明:● 增量模式<相对值控制>根据目标的设置设定值,来输出相应脉冲数的脉冲。
将控制码(Control code )设置为H02(即:增量模式;正向:OFF ;反向:ON ),当目标值为正时,方向信号输出为OFF ,同时高速计数器的当前值增加。
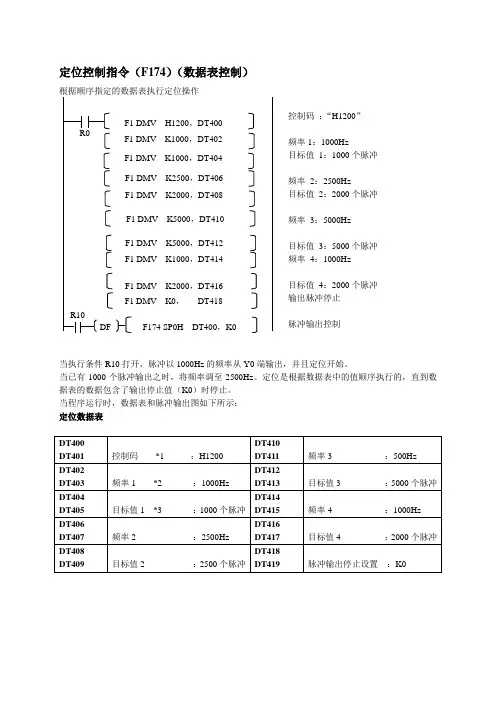
定位控制指令(F174)(数据表控制)当执行条件R10打开,脉冲以1000Hz 的频率从Y0端输出,并且定位开始。
当已有1000个脉冲输出之时,将频率调至2500Hz 。
定位是根据数据表中的值顺序执行的,直到数据表的数据包含了输出停止值(K0)时停止。
当程序运行时,数据表和脉冲输出图如下所示: 定位数据表(*2): 频率(Hz)“K 常数”1.5Hz到9.8kHz [K1 到K9800(单位:Hz)](接近9.8kHz的最大误差大约为-0.9kHz)*设定“K1”表示1.5Hz48Hz到100kHz[K48 到K100000(单位:Hz)](接近100kHz的最大误差大约为-3kHz)191Hz到100kHz[K191 到K100000(单位:Hz)](接近100kHz的最大误差大约为-0.8kHz)(*3): 目标值(K214783648—K214783647)设定的32位数据的目标值应该在下表所示范围之内。
脉冲输出图频率(速度)(Hz)500025001000高速计数器经过值(脉冲数)0 1000 3000 8000 10000开关:R10R903A(R903C)当指令F174(SP0H)的执行条件(开关)打开时,高速计数器控制标志R903A(R903C)打开,当经历值达到10000且脉冲输出停止时,R903A(R903C)关闭。
脉冲输出指令(F175)(直线插补)脉冲从X 轴(CH0)和Y 轴(CH2)输出,这样矢量速度就是初速度,值为500Hz ,最大速度为5000Hz ,加/减速时间为300ms ,控制两个轴的直线插补以达到目标位置。
当程序运行时,定位数据表和定位路径如下所示:定位路径Y轴(CH2)20005000X轴(CH0)(*2)矢量速度(初速度,最大速度)(Hz)(K常数)1.5Hz到1000kHz [K1到K100000]1.5Hz只用来表示0°或90°的角,并且用K1表示1.5Hz。

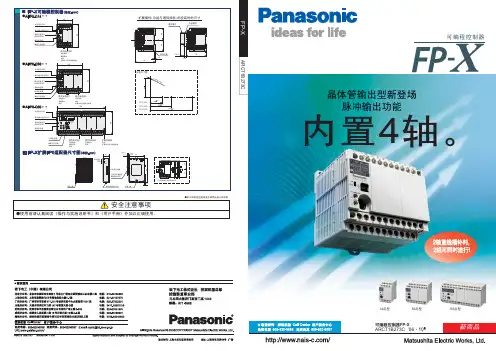
可编程控制器晶体管输出型新登场脉冲输出功能内置4轴。
2轴直线插补时,2组可同时进行!●本目录的监控器画面全部是由嵌入合成的。
AFPX-C60(已安装扩展插件的状态)AFPX-C30(已安装扩展插件的状态)AFPX-C14(已安装扩展插件的状态)小型PLC内,通过高速处理速度0.32μsec,也可对应要求高速扫描的用途。
※1 基本指令占35%和高级指令(数据转送、四则运算)占65%组合而成的5K步的程序。
小型机身内置了4轴高速脉冲输出功能。
2轴直线插补时,2组可同时进行。
凸轮的电子化控制、单元化生产设备及液晶定位的XY平台+Z轴控制、纸箱及热交换导管的立体弯曲加工、小型线圈的高密度绕线机等生产设备中所需的伺服电机、步进电机等的款式将越来越丰富,并趋向于多轴化设计。
其中的FP-X把4轴脉冲输出功能内置于小型机身中,成为既可节省空间又可降低成本又可进行多轴控制,且适用于小型设备控制的小型通用PLC。
超高速处理简单温度控制指令(F356 EZPID)MEWTOCOL主站功能追加Ethernet插件(近期销售)跟踪功能基本指令只需0.32μs,可快速扫描。
(例:5K步※1时,为1.9ms)可靠的安全性通过8位密码和禁止上传功能,有效保护程序。
配备USB端口※3通过普通USB电缆(AB型),可与计算机实现简便连接。
※3 C14型未具备此功能(C14为3轴)新功能晶体管输出型新登场通过超过小型PLC范畴的高程序容量32K步,可对应随着将来设备扩展而产生的范围广泛的各种应用。
※2 C14型为16k步充裕的大容量充裕的程序容量达到32K步。
注释区域也可以充分保证。
※2针对客户的“逐步扩展”的要求,可通过扩展插件,轻松地提高性能。
也可控制成本。
还有,利用扩展FP0适配器,最多可连接3台现有的FP0扩展单元。
广泛的扩展性I/O最多300点。
可通过功能扩展插件,使扩展范围更进一步扩大。
商品新阵容控制单元(样机:30点继电器输出型AFPX-C30R )I/O 状态监控LED扩展单元(样机:16点继电器输出型AFPX-E16R )功能扩展插件(样机:模拟量输入插件AFPX-AD2)扩展插件接口部盖扩展插件连接用连接器电池连接用连接器输入端子电源端子输出端子RUN/PROG.模式切换开关可调电位器输入RS232C 编程口(DC 电源型时无辅助电源输出)24VDC 辅助电源输出端子 C14:0.15A C30,C60:0.4AUSB 通信端口(C14R 除外)I/O 状态监控LED扩展单元连接用连接器固定用螺钉孔扩展单元连接用连接器扩展单元连接用连接器扩展单元连接用连接器2层安装用连接器※通信插件可在第2层安装输入输出端子或通信用信号端子输入端子输出端子具有优良扩展性的产品系列,能满足各种各样的要求。
永宏(FATEK)PLC高速脉冲输出指令应用 2008-11-16 16:51:46 来源:528工控网浏览次数:676VB与三菱FX系列PLC编程口通信源码VB与西门子S7-200PLC(PPI协议)通讯源码VB与松下PLC(FP系列)通讯源码永宏PLC(FATEK)的VB通讯源码VB编制的欧姆龙PLC通讯源码VB与FX系列PLC通过RS-232BD(RS-485BD)通讯源码台达PLC的MODBUS_ASCII通讯VB源码台达PLC的MODBUS_RTU通讯VB源码VB与三菱变频器485通讯源码VB与西门子S7-200的MODBUS_RTU通讯DELPHI与松下PLC的编程口通讯源码DELPHI与FX系列PLC通过RS-232(485)BD通讯源码DELPHI编制的三菱FX系列PLC编程口通信程序DELPHI与台达PLC的MODBUS_RTU 通讯源码DELPHI与台达PLC的MODBUS_ASCII通讯源码DELPHI与永宏PLC(FATEK)编程口通讯源码DELPHI与西门子S7-200的PPI协议通讯源码DELPHI与西门子S7-200的MODBUS_RTU 通讯本文以图例的方式,用一个简单的伺服电机寸动控制程序来说明永宏(FATEK)PLC高速脉冲输出指令(F140)HSPSO的应用方法永宏FATEK的高速脉冲输出指令(F140)HSPSO的定位程序是以文字的程序书写方式来编辑。
每一个定位点称之为一步,一个F140指令最多可编精辟250步定位点,第一步定位点占用九个寄存器。
要搞清楚的一个问题是,定位寄存器区、指令动作寄存器区无需要您去写值,您只需要在应用F140指令时指定这个区域的起始地址即可。
**定位寄存器区、指令动作寄存器区必须应用掉电保持寄存器**程序范例:当寸动按钮被按时间小于0.5秒时,只输出一个脉冲当寸动按钮被按时间大于0.5秒时,以10K的脉冲频率连续输出脉冲当寸动按钮放开时,停止输出脉冲图一寸动按钮按下时,清除指令动作寄存器,令F140指令从第一步定位点程序开始运行,F140的PS操作数设为0,指定脉冲输出端口为Y0与Y1;SR操作数指定定位命令表格起始地址为R5000;WR操作数指定指令动作起始寄存器地址为R2000;图二新增伺服命令表格图三编辑伺服命令表格将伺服命令表格的起始寄存器地址设定与F140指令中的SR操作数一样图四编辑第一步定位点程序第一步定位程序实现的功能为,以1K的频率发出一个脉冲后,等待0.5秒,如果在0.5秒的时间内,M0没有断开则执行下一步定位程序。
FP0高速脉冲输出功能FP0是松下公司推出的一款微型可编程控制器,具有高速脉冲输出功能。
高速脉冲输出是指在短时间内产生多个脉冲信号的功能,常用于控制步进电机、伺服电机、工控设备等。
下面将详细介绍FP0高速脉冲输出功能的特点和应用。
1.FP0高速脉冲输出的特点1.1高速性能:FP0高速脉冲输出支持最高100kHz的输出频率,能够满足大多数高速控制需求。
1.2多通道输出:FP0高速脉冲输出模块通常具有4路或8路输出通道,可以同时控制多个设备,提高系统的灵活性和控制能力。
1.3高精度:FP0高速脉冲输出能够实现微秒级的精确脉冲输出,保证了精准控制的需求。
1.4可编程性:FP0高速脉冲输出可以通过编程来控制输出频率、脉冲宽度、脉冲数量等参数,灵活适应不同的应用场景。
2.FP0高速脉冲输出的应用2.1步进电机控制:FP0高速脉冲输出能够精确控制步进电机的步进角度和转速,广泛应用于CNC机床、印刷设备、纺织设备等。
2.2伺服电机控制:FP0高速脉冲输出可以控制伺服电机的位置和速度,应用于机器人、数字仪表、自动化生产线等。
2.3工控设备:FP0高速脉冲输出可以用于控制各种工控设备,如输送带、分拣机、包装机等,实现精准的控制和调度功能。
3.FP0高速脉冲输出的编程实现3.1设置输出参数:包括输出通道、输出频率、脉冲宽度等参数的设置,一般通过特定的指令实现。
3.2编写运动控制程序:根据具体的应用需求,编写相应的运动控制程序,实现脉冲输出的逻辑和控制。
3.3监控和调试:通过监控输出信号,并进行相应的调试和优化,确保脉冲输出的准确性和稳定性。
4.FP0高速脉冲输出的优势相比于传统的脉冲输出方式,FP0高速脉冲输出具有以下优势:4.1灵活性:FP0高速脉冲输出可以通过编程实现各种复杂的控制逻辑和算法,满足不同的应用需求。
4.2精确性:FP0高速脉冲输出可以实现高精度的脉冲输出,保证了控制的准确性和稳定性。
4.3易扩展性:FP0高速脉冲输出模块可以和其他模块进行灵活组合,实现更复杂的控制功能。
19高速脉冲输出指令一高速脉冲输出功能是指在可编程序控制器的某些输出端产生高速脉冲,用来驱动负载实现精确控制。
这在运动控制中具有广泛应用。
使用高速脉冲输出功能时,PLC主机应选用晶体管输出型,以满足高速输出的频率要求。
一、高速脉冲有关概念1. 高速脉冲输出的方式高速脉冲输出有高速脉冲串输出PTO和宽度可调脉冲输出PWM两种方式。
PTO可以输出一串脉冲(占空比50%),用户可以控制脉冲的周期和个数,如图5-13(a)所示,PWM可以输出一串占空比可调的脉冲,用户可以控制脉冲的周期和脉宽,如图5-13(b)所示。
2. 高速脉冲输出端子的确定每种PLC主机最多可提供2个高速脉冲输出端。
高速脉冲的输出端不是任意选择的,必须按系统指定的输出点Q0.0和Q0.1来选择,也可以是以上两种方式的任意组合。
高速脉冲输出点包括在一般数字量输出映像寄存器编号范围内。
同一个输出点只能用做一种功能,如果Q0.0和Q0.1在程序执行时用做高速脉冲输出,则只能被高速脉冲输出使用,其通用功能被自动禁止,任何输出刷新、输出强制、立即输出等指令都无效。
只有高速脉冲输出不用的输出点才可能做普通数字量输出点使用。
在Q0.0和Q0.1编程时用做高速脉冲输出,但未执行脉冲输出指令时,可以用普通位操作指令设置这两个输出位,以控制高速脉冲的起始和终止电位。
二、高速脉冲指令及特殊寄存器高速脉冲输出有两种输出形式:高速脉冲序列(或称高速脉冲串)输出PTO(Pulse train Output)和脉冲宽度调制输出PWM(Pulse Width modulation),可通过特殊继电器来定义输出形式,输出形式可以是PTO/PWM的任意组合。
1. LADSTL作用PLS Q0.X检测各个相关特殊继电器的状态,激活由控制位定义的脉冲操作,从Q0.0或Q0.1输出高速脉冲。
高速脉冲串输出PTO 和宽度可调脉冲输出PWM 都由PLS 指令激活输出。
2. 特殊标志寄存器每个高速脉冲发生器对应一定数量的特殊寄存器,这些寄存器包括控制字节寄存器、状态字节寄存器和参数数值寄存器。
可编程控制器晶体管输出型新登场脉冲输出功能内置4轴。
2轴直线插补时,2组可同时进行!●本目录的监控器画面全部是由嵌入合成的。
AFPX-C60(已安装扩展插件的状态)AFPX-C30(已安装扩展插件的状态)AFPX-C14(已安装扩展插件的状态)小型PLC内,通过高速处理速度0.32μsec,也可对应要求高速扫描的用途。
※1 基本指令占35%和高级指令(数据转送、四则运算)占65%组合而成的5K步的程序。
小型机身内置了4轴高速脉冲输出功能。
2轴直线插补时,2组可同时进行。
凸轮的电子化控制、单元化生产设备及液晶定位的XY平台+Z轴控制、纸箱及热交换导管的立体弯曲加工、小型线圈的高密度绕线机等生产设备中所需的伺服电机、步进电机等的款式将越来越丰富,并趋向于多轴化设计。
其中的FP-X把4轴脉冲输出功能内置于小型机身中,成为既可节省空间又可降低成本又可进行多轴控制,且适用于小型设备控制的小型通用PLC。
超高速处理简单温度控制指令(F356 EZPID)MEWTOCOL主站功能追加Ethernet插件(近期销售)跟踪功能基本指令只需0.32μs,可快速扫描。
(例:5K步※1时,为1.9ms)可靠的安全性通过8位密码和禁止上传功能,有效保护程序。
配备USB端口※3通过普通USB电缆(AB型),可与计算机实现简便连接。
※3 C14型未具备此功能(C14为3轴)新功能晶体管输出型新登场通过超过小型PLC范畴的高程序容量32K步,可对应随着将来设备扩展而产生的范围广泛的各种应用。
※2 C14型为16k步充裕的大容量充裕的程序容量达到32K步。
注释区域也可以充分保证。
※2针对客户的“逐步扩展”的要求,可通过扩展插件,轻松地提高性能。
也可控制成本。
还有,利用扩展FP0适配器,最多可连接3台现有的FP0扩展单元。
广泛的扩展性I/O最多300点。
可通过功能扩展插件,使扩展范围更进一步扩大。
商品新阵容控制单元(样机:30点继电器输出型AFPX-C30R )I/O 状态监控LED扩展单元(样机:16点继电器输出型AFPX-E16R )功能扩展插件(样机:模拟量输入插件AFPX-AD2)扩展插件接口部盖扩展插件连接用连接器电池连接用连接器输入端子电源端子输出端子RUN/PROG.模式切换开关可调电位器输入RS232C 编程口(DC 电源型时无辅助电源输出)24VDC 辅助电源输出端子 C14:0.15A C30,C60:0.4AUSB 通信端口(C14R 除外)I/O 状态监控LED扩展单元连接用连接器固定用螺钉孔扩展单元连接用连接器扩展单元连接用连接器扩展单元连接用连接器2层安装用连接器※通信插件可在第2层安装输入输出端子或通信用信号端子输入端子输出端子具有优良扩展性的产品系列,能满足各种各样的要求。
6.4 脉冲输出功能本章节是对有关FP∑输出功能作了介绍6.4.1 脉冲输出功能的概述用到的指令和控制器●利用FP∑的脉冲输出功能,可以控制脉冲串输入形式的电机驱动器,来实现定位控制。
●专用指令F171(SPDH)能够根据设置的初始速度、最大速度、加/减速时间以及目标值,自动输出所要求的脉冲,实现梯形升降速的定位控制。
●专用指令F171(SPDH)还能实现自动回原点功能。
●专用指令F172(PLSH),可以实现点动(JOG)的脉冲输出。
目标值也可以被设置,以便脉冲输出能在目标值匹配时停下来。
●专用指令F174(PL0H),能实现脉冲输出和数据表一致,以便定位控制依照数据表来工作。
●专用指令F175(SPSH),能实现线性插补控制。
通过指定合成速度,加/减速时间以及目标值,这条指令使用线性插补控制实现脉冲输出。
●专用指令F176(SPCH),能实现圆弧插补控制。
用户可以从两种形成圆弧的方法中选择其一。
一种是指定经过的位置,另一种是指定一个圆心位置。
通过指定不同的参数,脉冲使用圆弧插补实现输出。
注意:直线插补控制指令F175(SPSH)和圆弧插补控制指令F176(SPCH)只能和C32T2控制单元配合使用。
设置系统寄存器当使用脉冲输出功能时,应将相应通道的系统寄存器No.400和No.401设置为“不使用高速计数器”。
6.4.2 几种脉冲输出方式正/反向脉冲 输出方式在这种方法中,控制器使用双向脉冲工作,一个为正向旋转脉冲,另一个为反向旋转脉冲图84:FP ∑脉冲输出功能—CW/CCW 输出方式脉冲+方向 输出方式(正向:关/反向:开)在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转方向。
在这种模式下,当旋转方向信号为“关”的时候正向脉冲工作。
图85:FP ∑脉冲输出—脉冲+方向输出方式1脉冲+方向在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转方向。
在这种模式下,当旋转方向信号为“开”的时候正向脉冲工作。
脉冲输出功能
本章节是对有关FP∑输出功能作了介绍
6.4.1 脉冲输出功能的概述
用到的指令和控制器
●利用FP∑的脉冲输出功能,可以控制脉冲串输入形式的电机驱动器,来实现定位控制。
●专用指令F171(SPDH)能够根据设置的初始速度、最大速度、加/减速时间以及目标值,自动
输出所要求的脉冲,实现梯形升降速的定位控制。
●专用指令F171(SPDH)还能实现自动回原点功能。
●专用指令F172(PLSH),可以实现点动(JOG)的脉冲输出。
目标值也可以被设置,以便脉冲
输出能在目标值匹配时停下来。
●专用指令F174(PL0H),能实现脉冲输出和数据表一致,以便定位控制依照数据表来工作。
●专用指令F175(SPSH),能实现线性插补控制。
通过指定合成速度,加/减速时间以及目标值,
这条指令使用线性插补控制实现脉冲输出。
●专用指令F176(SPCH),能实现圆弧插补控制。
用户可以从两种形成圆弧的方法中选择其一。
一种是指定经过的位置,另一种是指定一个圆心位置。
通过指定不同的参数,脉冲使用圆弧插补实现输出。
注意:
直线插补控制指令F175(SPSH)和圆弧插补控制指令F176(SPCH)只能和C32T2控制单元配合使用。
设置系统寄存器
当使用脉冲输出功能时,应将相应通道的系统寄存器和设置为“不使用高速计数器”。
6.4.2 几种脉冲输出方式
正/反向脉冲 输出方式
在这种方法中,控制器使用双向脉冲工作,一个为正向旋转脉冲,
另一个为反向旋转脉冲
图84:FP ∑脉冲输出功能—CW/CCW 输出方式
脉冲+方向 输出方式(正向:关/反向:开)
在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转
方向。
在这种模式下,当旋转方向信号为“关”的时候正向脉冲工作。
图85:FP ∑脉冲输出—脉冲+方向输出方式1
脉冲+方向
在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转方向。
在这种模式下,当旋转方向信号为“开”的时候正向脉冲工作。
图86:FP ∑脉冲输出—脉冲+方向输出方式2
6.4.3 I/O 口分配
对于双冲输入的驱动器(对于正/反向脉冲输入方式)
:
● 对于“正向+反向的脉冲”双输出的触点作为一个脉冲输出使用。
● 脉冲输出点、方向输出点、以及原点输入点的I/O 分配,由所选定的通道来确定。
(参见书6-6
上的详述表格。
)
设置控制编码F171(SPDH )指令为“正/反向脉冲”方式
单脉冲输入驱动器(脉冲+方向开关输入方式)
●
一个输出点用作单脉冲输出,而另一个用作方向输出;
● 脉冲输出点、方向输出点、以及原点输入点的I/O 分配,由所选定的通道来确定。
(参见书6-6
上的详述表格。
) ● 原点接近输入端可以通过专门的数据寄存器“DT90052”的位设置来自由选择。
可以扩展到两个驱动系统的联接
6.4.4 控制模式说明
增量模式<相对值控制>
根据目标的设置设定值,来输出相应脉冲数的脉冲。
绝对模式<绝对值控制>
回原点方式
●脉冲是连续输出的,直到执行指令F171(SPDH)使原点定位输入。
●为了在接近原点时对运动减速,使用接近原点输入对DT90052专用数据寄存器中相对应的位进
行设置为:OFF ON OFF。
●当返回原点动作执行完毕时,微分计数器清零输出。
点动方式
●当触发器因指令F172(PLSH)处于“开”状态时,脉冲从指定的通道输出。
同样,当指定的
目标值被获得时,脉冲输出将停止。
●脉冲方向输出和输出频率将根据指令F172(PLSH)来指定。
6.4.5 脉冲输出功能中用到的指令
定位控制指令(F171)(梯形速度控制)
根据指定的数据表可以进行自动的梯形速度控制。
从Y0输出端产生一个脉冲,设置初速度为500Hz ,最大速度为5000Hz ,加/减速时间为300ms ,10000个脉冲数的运动。
当程序运行时,定位数据表和脉冲输出图如下所示
定位数据表 脉冲输出图
(*2): 频率(Hz)“K 常数”
到[K1 到K9800(单位:Hz)](接近的最大误差大约为)
*设定“K1”表示
48Hz到100kHz[K48 到K100000(单位:Hz)](接近100kHz的最大误差大约为-3kHz)191Hz到100kHz[K191 到K100000(单位:Hz)](接近100kHz的最大误差大约为)(*3): 加减速时间(ms)“K 常数”
走30步:K30到K32767
走60步:K36到K32767
(*4): 目标值“K 常数”
K—48 到K—
图93:FP∑指令“F171”的控制码
定位控制指令(F171)(原点返回)
根据指定的数据表执行原点返回。
从Y1端输出脉冲并执行原点返回。
设置初速度为100Hz,最大速度为2000Hz,加/减速时间为150ms。
图94:FP∑定位控制指令“F171”编程
当程序运行时,定位数据表和脉冲输出图如下所示
定位数据表
脉冲输出图(原点接近信号未用)脉冲输出图(原点接近信号已用)
150ms 150ms 150ms
图95:指令“F171”脉冲输出编程
到[K1 到K9800(单位:Hz)](接近的最大误差大约为)
*设定“K1”表示
48Hz到100kHz[K48 到K100000(单位:Hz)](接近100kHz的最大误差大约为-3kHz)191Hz到100kHz[K191 到K100000(单位:Hz)](接近100kHz的最大误差大约为)(*3): 加减速时间(ms)“K 常数”
走30步:K30到K32767
走60步:K36到K32767
(*4): 偏差计数器清零标志“K 常数”
到100ms[K0到K100] 设置值和偏差(或更小)
不使用或使用时设置为K0。
如果写入的值超出偏差计数器清零标志的范围,在范围内取一个修正的值
图93:FP∑指令“F171”的控制码
提示技巧
回原点操作模式
使用FP∑回原点有两种操作模式,类型Ⅰ回原点和类型Ⅱ回原点。
类型Ⅰ回原点
无论是否有接近原点输入,无论减速是否发生还是完成,原点返回输入都是有效的。
在这种模式下,原点接近输入未用。
原点接近输入未用时当原点接近输入使用时
如何时候原点输入有效
原点在原点接近输入为减速时输入
类型Ⅱ回原点
在这种模式下,回原点输入只有在基于原点接近输入的减速完成之后才有效。
原点输入有效
图97:FP∑原点返回操作模式
脉冲输出指令(F172)(点动操作,目标值设置)
这条指令是用来进行点动操作的,当执行状态(开关)处于打开的时从期望输出得到一个脉冲,以此来进行点动操作。
的脉冲
当程序运行时,数据表和脉冲输出图如下所示。
数据表
脉冲输出图
XB (JOG 命令) ON
OFF
Y0(脉冲) 300Hz
0Hz
图99:FP ∑指令“F172”的脉冲输出图
到[K1 到K9800(单位:Hz)](接近的最大误差大约为)
*设定“K1”表示
48Hz到100kHz[K48 到K100000(单位:Hz)](接近100kHz的最大误差大约为-3kHz)191Hz到100kHz[K191 到K100000(单位:Hz)](接近100kHz的最大误差大约为)
(*3): 目标值(绝对值)(只能在版本或其后的版本中指定)
这个值只有在设定的目标值符合停止模式时使用(惟独绝对值)。
按下图显示的设定范围指定目标值。
如果指定的目标值超出设定范围,输出的脉冲数将与设定的值不同。
在不计数模式下目标值设置将不起作用。
图100:FP∑指令“F172”的控制码
提示技巧
使用FP∑在执行点动进给时有两种操作模式,一种是没有指定目标值,另一种是当达到目标值时停止进给。
一般的点动进给(没有指定目标值的模式)
只要状态设置为“开”,脉冲就会按照数据表的状态设置输出。
数据表
脉冲输出图
XB ON
(JOG命令) OFF
300Hz
0Hz
达到目标值脉冲输出停止模式(只支持版本或其后的版本)
使用FP∑(C32T2)的版本或其后的版本,在执行点动时可以为目标值设置“达到目标值脉冲输出停止”的操作模式。
如下所示,控制码设置为此模式,然后在数据表中选定目标值。
脉冲输出图
XB
Y0
脉冲停止时目标。