PLC高速脉冲指令
- 格式:ppt
- 大小:177.50 KB
- 文档页数:17
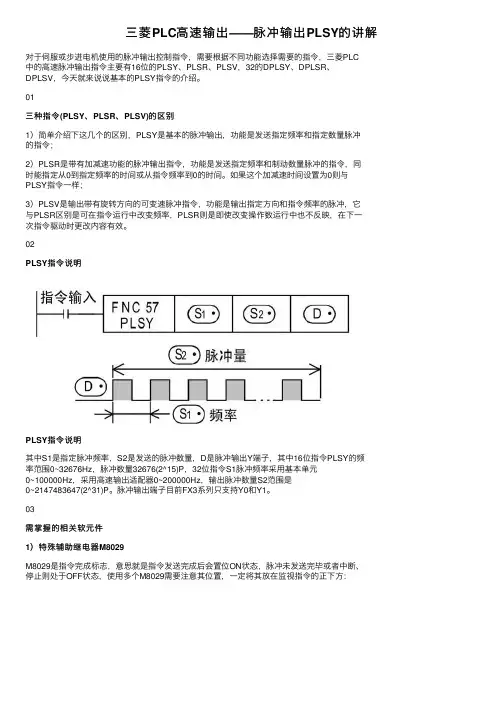
三菱PLC⾼速输出——脉冲输出PLSY的讲解对于伺服或步进电机使⽤的脉冲输出控制指令,需要根据不同功能选择需要的指令,三菱PLC中的⾼速脉冲输出指令主要有16位的PLSY、PLSR、PLSV,32的DPLSY、DPLSR、DPLSV,今天就来说说基本的PLSY指令的介绍。
01三种指令(PLSY、PLSR、PLSV)的区别1)简单介绍下这⼏个的区别,PLSY是基本的脉冲输出,功能是发送指定频率和指定数量脉冲的指令;2)PLSR是带有加减速功能的脉冲输出指令,功能是发送指定频率和制动数量脉冲的指令,同时能指定从0到指定频率的时间或从指令频率到0的时间。
如果这个加减速时间设置为0则与PLSY指令⼀样;3)PLSV是输出带有旋转⽅向的可变速脉冲指令,功能是输出指定⽅向和指令频率的脉冲,它与PLSR区别是可在指令运⾏中改变频率,PLSR则是即使改变操作数运⾏中也不反映,在下⼀次指令驱动时更改内容有效。
02PLSY指令说明PLSY指令说明其中S1是指定脉冲频率,S2是发送的脉冲数量,D是脉冲输出Y端⼦,其中16位指令PLSY的频率范围0~32676Hz,脉冲数量32676(2^15)P,32位指令S1脉冲频率采⽤基本单元0~100000Hz,采⽤⾼速输出适配器0~200000Hz,输出脉冲数量S2范围是0~2147483647(2^31)P。
脉冲输出端⼦⽬前FX3系列只⽀持Y0和Y1。
03需掌握的相关软元件1)特殊辅助继电器M8029M8029是指令完成标志,意思就是指令发送完成后会置位ON状态,脉冲未发送完毕或者中断、停⽌则处于OFF状态,使⽤多个M8029需要注意其位置,⼀定将其放在监视指令的正下⽅:M8029放置位置下⾯我们在三菱FX3g型PLC中看下指令的使⽤,XY双轴采⽤PLSY指令,X轴频率200p/s,脉冲数量2000p,Y轴脉冲频率500p/s,脉冲数量2500p,可以算出,X轴10s完成,Y轴5s完成,下⾯观察M8029的变化:M8029的变化从上图看出,Y轴脉冲发送完成后,M8029闭合,但只⽤Y轴下⽅的M8029有输出M201,X轴没有,等到X轴脉冲指令完成,M200才闭合,所以在放置M8029标志⼀定要注意位置。
最专业的PLC知识讲解:PLC高速脉冲输出指令基本指令和顺序控制指令是PLC最常用的指令,为了适应现代工业自动控制需要,PLC制造商开始逐步为PLC增加很多功能指令,功能指令使PLC具有强大的数据运算和特殊处理功能,从而大大扩展了PLC的使用范围。
S7-200 PLC 内部有两个高速脉冲发生器,通过设置可让它们产生占空比为50%、周期可调的方波脉冲(即PTO脉冲),或者产生占空比及周期均可调节的脉宽调制脉冲(即PWM脉冲)。
占空比是指高电平时间与周期时间的比值。
PTO脉冲和PWM脉冲如图1所示。
图1 PTO脉冲和PWM脉冲说明在使用脉冲发生器功能时,其产生的脉冲从Q0.0和Q0.1端子输出,当指定一个发生器输出端为Q0.0时,另一个发生器的输出端自动为Q0.1,若不使用脉冲发生器,这两个端子恢复普通端子功能。
要使用高速脉冲发生器功能,PLC应选择晶体管输出型,以满足高速输出要求。
一、指令说明高速脉冲输出指令说明如下:二、高速脉冲输出的控制字节、参数设置和状态位要让高速脉冲发生器产生合符要求的脉冲,须对其进行有关控制及参数设置,另外,通过读取其工作状态可触发需要的操作。
1.控制字节高速脉冲发生器的控制采用一个SM 控制字节(8位),用来设置脉冲输出类型(PTO或PWM)、脉冲时间单位等内容。
高速脉冲发生器的控制字节说明见表5-14,例如当SM67.6=0时,让Q0.0端子输出PTO脉冲;当SM77.3=1时,让Q0.1端子输出时间单位为ms的脉冲。
表1 速脉冲发生器的控制字节2.参数设置高速脉冲发生器采用SM存储器来设置脉冲的有关参数。
脉冲参数设置存储器说明见表2,例如SM67.3=1,SMW68=25,则将脉冲周期设为25ms。
表2 脉冲参数设置存储器3. 状态位高速脉冲发生器的状态采用SM位来显示,通过读取状态位信息可触发需要的操作。
高速脉冲发生器的状态位说明见表3,例如SM66.7=1表示Q0.0端子脉冲输出完成。
欧姆龙高速脉冲指令
摘要:
1.欧姆龙CPH 型PLC 简介
2.高速脉冲输出指令的作用
3.高速脉冲输出指令的应用实例
4.总结
正文:
一、欧姆龙CPH 型PLC 简介
欧姆龙CPH 型PLC 是日本欧姆龙公司推出的一款可编程逻辑控制器,广泛应用于各种工业自动化控制场合。
其具有高速、高性能、多功能、易编程等特点,能够满足不同场合的控制需求。
二、高速脉冲输出指令的作用
高速脉冲输出指令是欧姆龙CPH 型PLC 中的一种指令,主要用于控制步进电机或伺服电机等高速脉冲驱动设备。
通过高速脉冲输出指令,可以实现对驱动设备的精确控制和调速,从而满足各种工业自动化控制场合的要求。
三、高速脉冲输出指令的应用实例
1.控制步进电机
步进电机是一种将电脉冲转换为角位移的电机,其工作原理是通过接收脉冲信号,驱动电机转动一定的角度。
欧姆龙CPH 型PLC 通过高速脉冲输出指令,可以精确控制步进电机的转速、位置和转向,实现对步进电机的精确控制。
2.控制伺服电机
伺服电机是一种通过接收脉冲信号实现角位移控制的电机。
与步进电机不同,伺服电机具有更高的控制精度和更低的转速波动。
欧姆龙CPH 型PLC 通过高速脉冲输出指令,可以实现对伺服电机的精确控制和调速,提高控制精度和运动平稳性。
四、总结
欧姆龙CPH 型PLC 的高速脉冲输出指令在工业自动化控制领域具有广泛的应用,可以实现对步进电机和伺服电机等高速脉冲驱动设备的精确控制和调速。
欧姆龙高速脉冲指令摘要::欧姆龙高速脉冲指令1.欧姆龙CPH 型PLC 简介2.高速脉冲指令的应用3.高速脉冲指令的使用方法4.高速脉冲指令的优势和局限5.欧姆龙高速脉冲指令在工业自动化领域的应用案例正文:欧姆龙高速脉冲指令欧姆龙CPH 型PLC 是一种广泛应用于工业自动化领域的可编程逻辑控制器。
它具有强大的控制功能和稳定的性能,可以满足各种复杂的控制需求。
在欧姆龙CPH 型PLC 中,高速脉冲指令是一种重要的控制指令,主要用于控制步进电机、伺服电机等高速运动设备。
高速脉冲指令的应用非常广泛,主要涉及到印刷、包装、纺织、机床、机器人等众多领域。
例如,在印刷行业中,高速脉冲指令可以用于控制印刷机的滚筒旋转;在包装行业中,可以用于控制包装机的封口装置;在纺织行业中,可以用于控制纺织机的纱锭旋转等。
高速脉冲指令的使用方法相对简单,可以通过编写程序实现对设备的控制。
在编写程序时,需要根据设备的具体参数和控制要求,设置适当的脉冲频率、脉冲数量等参数。
此外,还需要注意避免脉冲信号的干扰,确保控制信号的稳定性和可靠性。
欧姆龙高速脉冲指令具有以下优势:1.高速:高速脉冲指令可以实现快速、精确的控制,提高设备的运行效率和精度;2.稳定:高速脉冲指令具有较强的抗干扰能力,可以保证控制信号的稳定性和可靠性;3.灵活:高速脉冲指令可以适应不同设备的控制需求,具有较强的灵活性。
然而,欧姆龙高速脉冲指令也存在一定的局限性,如对脉冲信号的频率、幅值等参数有一定的要求,需要根据具体的设备参数进行调整。
在工业自动化领域,欧姆龙高速脉冲指令的应用案例众多。
例如,在印刷行业中,可以用于控制印刷机的滚筒旋转,实现高速、精确的印刷;在包装行业中,可以用于控制包装机的封口装置,实现高速、精确的包装;在纺织行业中,可以用于控制纺织机的纱锭旋转,实现高速、精确的纺织等。
1、概述S7-200 有两个置PTO/PWM 发生器,用以建立高速脉冲串(PTO)或脉宽调节(PWM)信号波形。
当组态一个输出为PTO 操作时,生成一个50%占空比脉冲串用于步进电机或伺服电机的速度和位置的开环控制。
置PTO功能提供了脉冲串输出,脉冲周期和数量可由用户控制。
但应用程序必须通过PLC内置I/O 提供方向和限位控制。
为了简化用户应用程序中位控功能的使用,STEP7--Micro/WIN 提供的位控向导可以帮助您在几分钟内全部完成PWM,PTO或位控模块的组态。
向导可以生成位置指令,用户可以用这些指令在其应用程序中为速度和位置提供动态控制。
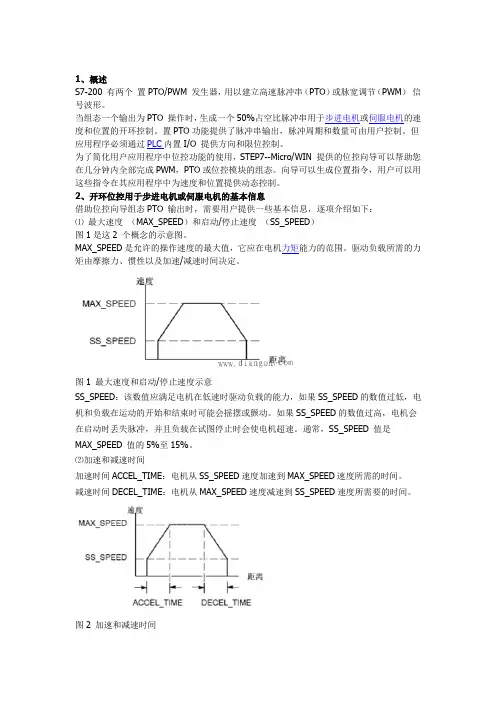
2、开环位控用于步进电机或伺服电机的基本信息借助位控向导组态PTO 输出时,需要用户提供一些基本信息,逐项介绍如下:⑴最大速度(MAX_SPEED)和启动/停止速度(SS_SPEED)图1是这2 个概念的示意图。
MAX_SPEED是允许的操作速度的最大值,它应在电机力矩能力的范围。
驱动负载所需的力矩由摩擦力、惯性以及加速/减速时间决定。
图1 最大速度和启动/停止速度示意SS_SPEED:该数值应满足电机在低速时驱动负载的能力,如果SS_SPEED的数值过低,电机和负载在运动的开始和结束时可能会摇摆或颤动。
如果SS_SPEED的数值过高,电机会在启动时丢失脉冲,并且负载在试图停止时会使电机超速。
通常,SS_SPEED 值是MAX_SPEED 值的5%至15%。
⑵加速和减速时间加速时间ACCEL_TIME:电机从SS_SPEED速度加速到MAX_SPEED速度所需的时间。
减速时间DECEL_TIME:电机从MAX_SPEED速度减速到SS_SPEED速度所需要的时间。
图2 加速和减速时间加速时间和减速时间的缺省设置都是1000毫秒。
通常电机可在小于1000 毫秒的时间工作。
参见图2。
这2个值设定时要以毫秒为单位。
注意:电机的加速和失速时间要过测试来确定。
这五个指令虽然都是脉冲输出型,但可以分为两大类:一、脉冲输出指令(包括PLSY,PLSR和PLSR):可以应用高速点和普通点1、PLSY指令使用中可以设置单个输出点以一定的频率发出目标值个脉冲,在指令中可以设置脉冲频率、脉冲总数、和发出脉冲的输出点;但只能控制脉冲,如果是脉冲加方向的脉冲模式,那方向点要另选一个普通开关点另外控制。
2、PLSR为设置匀加减速指令,在指令中可以设置脉冲的最大频率、脉冲总数、加减速时间和脉冲输出点。
通过设置加减速时间来实现匀加速。
如果脉冲加方向的脉冲模式也需要另外控制方向点。
3、PLSV指令,为任意时间可变速指令,可以实时改变脉冲频率的指令,在指令中可以设置脉冲的实时频率、发出脉冲的输出点,和方向点。
但是不能设置发出脉冲的总数,也就是不能通过指令定位,如果需要不是很精准的定位可以在使用高速点的时候用脉冲计数器和目标值做一个比较,但是会在PLC的每个扫描周期比较一次,所以会超出一些脉冲。
二、定位指令:(包括DRVA和DRVI)他们都是为定位指令服务的,因此只能应用于高速点。
他们的指令表现形式基本一致,因此不做单一说明;在他们指令中可以设置脉冲总数、脉冲频率、脉冲的发出点和方向点。
高速脉冲点的特点就是他们有自己的脉冲计数寄存器,也就是不管通过上述几个指令发出脉冲,高速点会有以个特定的寄存器记录所发出的脉冲数,包括正向的和反向的,可作为运动控制中每个轴的坐标。
以上两个指令不同之处就是:DRVA是绝对记录脉冲式的,他的脉冲总数实际是他要到达的目标值,也就是和各高速点的计数寄存器相匹配,例如,当你输入脉冲目标值为20000,而你高速点的计数寄存器中是30000,这是他回朝着反向发出10000个脉冲;而DRVI指令却不同,他不管高速点计数器中的脉冲坐标值,他会向正方向运行20000个脉冲,因而成为相对脉冲指令。
以上说明比较混乱,语言组织不是很好,如果你哪个细节不明白再问我2:。
干货:三菱FX3U控制伺服的高速脉冲指令,跟我一起做,马上就会三菱FX3U做为一款入门级PLC,应用很广泛,其实学习PLC就几点,开关量的输入、输出,就是我们平常所说的IO、伺服(或者步进电机)的控制、Modbus通信、模拟量输入输出,掌握了这些,基本可以做80%的项目了,小编今天主要来和大家说一下伺服电机(或者步进电机)的控制方法。
其实伺服电机就是高级一点的步进,其自带编码器,驱动器功能更加强大,支持位置模式、速度模式和转矩模式三种类型,因为伺服电机可以精确定位,所以通常我们用到的是位置模式。
位置模式需要PLC发送高速脉冲串给伺服驱动器,伺服驱动器再驱动伺服电机按照一定的角度和速度来旋转,从而达到位置控制的模式三菱FX3U这款PLC控制伺服电机有两种方法,一种是高速脉冲模式,一种是定位模式,其指令是不一样的,同时,FX3U只支持三路高速脉冲的发送,分别是Y0、Y1、Y2,所以最多只能控制三台伺服电机,如果想控制超三台伺服电机,可以选择加装定位模块或者几台PLC组网来实现。
一、高速脉冲模式1、PLSY指令PLSY是高速脉冲输出指令,可以指定Y0、Y1或者Y2发送高速脉冲,其指令格式如下如上图所示,分别是16位高速脉冲输出和32位高速脉冲输出,16位高速脉冲输出可以发送最大频率为32767的数据,而32位高速脉冲输出可以发送最大频率为200,000Hz的脉冲串,各位同学可以根据实际需要进行选择,不过这里小编建议大家养成一个好习惯,就是坚持用32位运算进行程序处理,可以有效防止程序溢出。
熟悉了相关指令,我们看下详细用法。
比如我们想接通M0的同时,让Y0输出频率为10000,数量为25000的脉冲串,那么就这样来写程序其中:频率为每秒钟发送的脉冲数,表示到伺服电机就是速度发送脉冲数即为一共发送多少个脉冲给驱动器,转换到伺服电机就是走过的距离或者角度Y0为输出通道,接线到驱动侧的高速脉冲输入点。
这里M0只要保持接通,就会以当前速度发送25000个脉冲,中间如果M0断开,则停止发送脉冲,再次接通M0则重新发送25000个脉冲直到完成。
在Structured Control Language (SCL)中,高速脉冲指令通常用于控制脉冲的产生和分配。
这些指令可以用于实现运动控制、过程控制和逻辑控制等应用。
在SCL中,高速脉冲指令通常通过PLC(可编程逻辑控制器)或运动控制器来执行。
具体的指令和实现方式可能会因不同的PLC 和运动控制器而有所不同,但一般来说,以下是一些常见的高速脉冲指令:
1. PULSE:生成一个指定数量和频率的脉冲信号,可以用于驱动伺服电机或其他设备。
2. PULSECLR:清除脉冲信号的计数器,通常用于在需要重新生成脉冲信号时使用。
3. PULSEPLS:在脉冲信号的上升沿或下降沿时,将指定的脉冲数量添加到脉冲信号的计数器中。
4. PULSESET:设置脉冲信号的计数器为指定的值,通常用于初始化脉冲信号的计数器。
5. PULSEW AIT:等待指定的脉冲数量被消耗完,然后继续执行后续的指令。
这些高速脉冲指令可以通过编写SCL程序来控制脉冲的产生和分配。
具体的实现方式需要根据具体的PLC和运动控制器进行相应
的编程和调试。
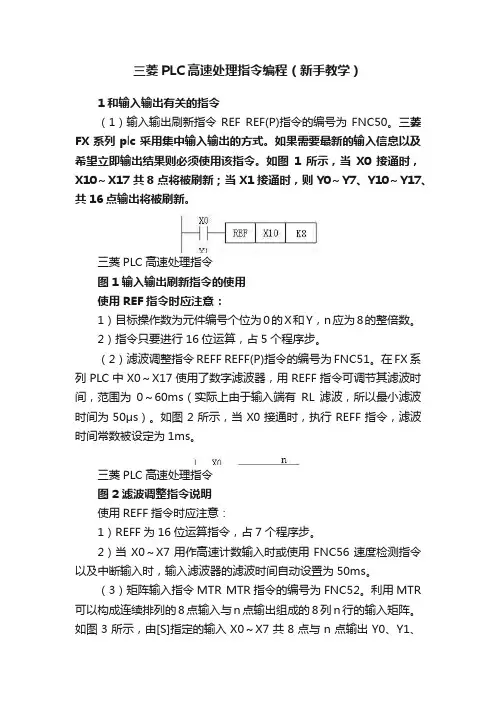
三菱PLC高速处理指令编程(新手教学)1和输入输出有关的指令(1)输入输出刷新指令REF REF(P)指令的编号为FNC50。
三菱FX系列plc采用集中输入输出的方式。
如果需要最新的输入信息以及希望立即输出结果则必须使用该指令。
如图1所示,当X0接通时,X10~X17共8点将被刷新;当X1接通时,则Y0~Y7、Y10~Y17、共16点输出将被刷新。
三菱PLC高速处理指令图1 输入输出刷新指令的使用使用REF指令时应注意:1)目标操作数为元件编号个位为0的X和Y,n应为8的整倍数。
2)指令只要进行16位运算,占5个程序步。
(2)滤波调整指令REFF REFF(P)指令的编号为FNC51。
在FX系列PLC中X0~X17使用了数字滤波器,用REFF指令可调节其滤波时间,范围为0~60ms(实际上由于输入端有RL滤波,所以最小滤波时间为50μs)。
如图2所示,当X0接通时,执行REFF指令,滤波时间常数被设定为1ms。
三菱PLC高速处理指令图2 滤波调整指令说明使用REFF指令时应注意:1)REFF为16位运算指令,占7个程序步。
2)当X0~X7用作高速计数输入时或使用FNC56速度检测指令以及中断输入时,输入滤波器的滤波时间自动设置为50ms。
(3)矩阵输入指令MTR MTR指令的编号为FNC52。
利用MTR 可以构成连续排列的8点输入与n点输出组成的8列n行的输入矩阵。
如图3所示,由[S]指定的输入X0~X7共8点与n点输出Y0、Y1、Y2(n=3)组成一个输入矩阵。
PLC在运行时执行MTR指令,当Y0为ON时,读入第一行的输入数据,存入M30~M37中;Y1为ON 时读入第二行的输入状态,存入M40~M47。
其余类推,反复执行。
三菱PLC高速处理指令图3 矩阵输入指令的使用使用MTR指令时应注意:1)源操作数[S]是元件编号个位为0的X,目标操作数[D1] 是元件编号个位为0的Y,目标操作数[D2] 是元件编号个位为0的Y、M 和S,n的取值范围是2~8。