能量原理与变分法
- 格式:ppt
- 大小:1.29 MB
- 文档页数:31
能量转化的原理和计算知识点总结能量在我们的生活中起着至关重要的作用,它不断地转化和传递,给予我们生活所需的动力和热量。
了解能量转化的原理以及相关的计算知识点,可以帮助我们更好地理解和应用能量在日常生活和科学研究中的重要性。
下面将对能量转化的原理和计算知识点进行总结。
一、能量转化的原理1. 能量守恒定律能量守恒定律是能量转化的基本原理之一。
根据能量守恒定律,能量在一个封闭系统中不能被创造或者消失,只能从一种形式转化为另一种形式。
例如,当物体从静止状态下滑落时,其势能不断转化为动能,从而使物体具有运动能力。
能量守恒定律的应用帮助我们分析和解决各种能量转化过程中的问题。
2. 能量转化的形式能量可以以多种不同的形式存在和转化。
常见的能量形式包括:机械能(动能和势能)、热能、光能、电能、化学能等。
不同形式的能量之间可以相互转化。
例如,太阳光中的光能可以通过光伏电池转化为电能,人体中食物中的化学能可以转化为身体的机械能和热能。
3. 能量转化过程中的损耗在能量转化过程中,总是会存在能量的损耗。
能量的损耗主要是由于摩擦力、空气阻力、热量的散失等因素引起的。
这意味着在能量转化过程中,一部分能量总是会转化为无用的形式,无法再继续利用。
能量转化过程中的损耗是我们需要考虑和减少的问题。
二、能量的计算知识点1. 动能的计算动能是物体由于运动而具备的能量。
其计算公式为:动能 = 1/2 ×质量 ×速度²。
其中,质量的单位为千克,速度的单位为米/秒。
通过动能的计算,我们可以评估物体的运动状态以及所具有的能量大小。
2. 势能的计算势能是物体由于位置或状态而具备的能量。
常见的势能有重力势能和弹性势能。
重力势能的计算公式为:重力势能 = 质量 ×重力加速度×高度。
弹性势能的计算公式为:弹性势能 = 1/2 ×弹性常数 ×形变²。
通过势能的计算,我们可以理解物体在不同位置或状态下所具有的能量大小。
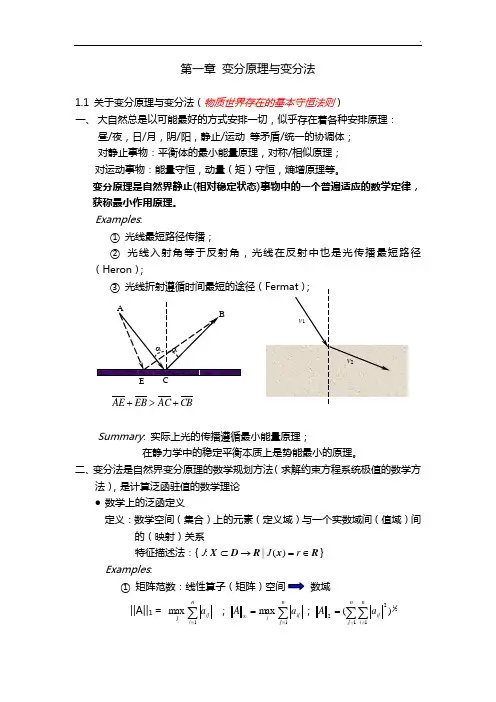
第一章 变分原理与变分法1.1 关于变分原理与变分法(物质世界存在的基本守恒法则)一、 大自然总是以可能最好的方式安排一切,似乎存在着各种安排原理:昼/夜,日/月,阴/阳,静止/运动 等矛盾/统一的协调体; 对静止事物:平衡体的最小能量原理,对称/相似原理;对运动事物:能量守恒,动量(矩)守恒,熵增原理等。
变分原理是自然界静止(相对稳定状态)事物中的一个普遍适应的数学定律,获称最小作用原理。
Examples :① 光线最短路径传播;② 光线入射角等于反射角,光线在反射中也是光传播最短路径(Heron );③CB AC EB AE +>+Summary : 实际上光的传播遵循最小能量原理;在静力学中的稳定平衡本质上是势能最小的原理。
二、变分法是自然界变分原理的数学规划方法(求解约束方程系统极值的数学方法),是计算泛函驻值的数学理论数学上的泛函定义定义:数学空间(集合)上的元素(定义域)与一个实数域间(值域)间的(映射)关系特征描述法:{ J :R x R D X ∈=→⊂r J )(|}Examples :① 矩阵范数:线性算子(矩阵)空间 数域‖A ‖1 = ∑=ni ij ja 1max ;∑=∞=nj ij ia A 1max;21)(1122∑∑===n j ni ij a A② 函数的积分: 函数空间数域 D ⊂=⎰n ba n f dxx f J )(Note : 泛函的自变量是集合中的元素(定义域);值域是实数域。
Discussion :① 判定下列那些是泛函:)(max x f f b x a <<=;x y x f ∂∂),(; 3x+5y=2; ⎰+∞∞-=-)()()(00x f dx x f x x δ ② 试举另一泛函例子。
物理问题中的泛函举例① 弹性地基梁的系统势能i. 梁的弯曲应变能: ⎰=∏l b dx dxw d EJ 0222)(21ii. 弹性地基贮存的能量: dx kw l f ⎰=∏0221 iii. 外力位能: ⎰-=∏l l qwdx 0iv. 系统总的势能:000;})({221222021===-+=∏⎰dxdww x dx qw kw dxw d EJ l泛函的提法:有一种梁的挠度函数(与载荷无关),就会有一个对应的系统势能。
第一章 变分原理与变分法1.1 关于变分原理与变分法(物质世界存在的基本守恒法则)一、 大自然总是以可能最好的方式安排一切,似乎存在着各种安排原理:昼/夜,日/月,阴/阳,静止/运动 等矛盾/统一的协调体; 对静止事物:平衡体的最小能量原理,对称/相似原理;对运动事物:能量守恒,动量(矩)守恒,熵增原理等。
变分原理是自然界静止(相对稳定状态)事物中的一个普遍适应的数学定律,获称最小作用原理。
Examples :① 光线最短路径传播;② 光线入射角等于反射角,光线在反射中也是光传播最短路径(Heron );③CB AC EB AE +>+Summary : 实际上光的传播遵循最小能量原理;在静力学中的稳定平衡本质上是势能最小的原理。
二、变分法是自然界变分原理的数学规划方法(求解约束方程系统极值的数学方法),是计算泛函驻值的数学理论数学上的泛函定义定义:数学空间(集合)上的元素(定义域)与一个实数域间(值域)间的(映射)关系特征描述法:{ J :R x R D X ∈=→⊂r J )(|}Examples :① 矩阵范数:线性算子(矩阵)空间 数域‖A ‖1 = ∑=ni ij ja 1max ;∑=∞=nj ij ia A 1max;21)(1122∑∑===n j ni ij a A② 函数的积分: 函数空间数域 D ⊂=⎰n ba n f dxx f J )(Note : 泛函的自变量是集合中的元素(定义域);值域是实数域。
Discussion :① 判定下列那些是泛函:)(max x f f b x a <<=;x y x f ∂∂),(; 3x+5y=2; ⎰+∞∞-=-)()()(00x f dx x f x x δ ② 试举另一泛函例子。
物理问题中的泛函举例① 弹性地基梁的系统势能i. 梁的弯曲应变能: ⎰=∏l b dx dxw d EJ 0222)(21ii. 弹性地基贮存的能量: dx kw l f ⎰=∏0221 iii. 外力位能: ⎰-=∏l l qwdx 0iv. 系统总的势能:000;})({221222021===-+=∏⎰dxdww x dx qw kw dxw d EJ l泛函的提法:有一种梁的挠度函数(与载荷无关),就会有一个对应的系统势能。

四、多电子体系线性变分法小结波函数的线性变分展开给我们的计算提供了一种高度可控波函数的线性变分展开给我们的计算提供了种高度可控性。
在一系列变化矢量空间中进行的变分计算中,我们可以得到一系列单调下降的能量,它们是精确能量的上限。
并且在m 维空间中计算的个本征能量是相应的个最低精确能量的近m m似。
非线性展开在非线性变分方法中,会出现变分参数的非线性项。
这时,变分能量仍然是基态能量的上限,但是变分确定的激发态能量不定是精确激发态能量的上界一定是精确激发态能量的上界。
另一方面,非线性变分方法得到的非线性波函数不再是正交另方面非线性变分方法得到的非线性波函数不再是正交的,因而不再是哈密顿算符的对角表象的基矢。
因此在非线性情况下,不同的解之间不再存在一个简单关系,甚至解的数目通常也是不知道的。
因此,计算的每个稳定点必须小心地判断它是也是不知道的。
因此,计算的每一个稳定点必须小心地判断它是否是薛定谔方程的一个可以接受的解。
精确波函数和能量的大小一致性:A A =AB BψψψAB A BE E E =+波函数是分离可乘的(multiplicatively separable ),能量是分离可加(additively separable )的。
线性变分的大小致性线性变分的大小一致性前已述及,对于精确波函数大小一致性是自然满足的。
但是对于线性变分波函数,需要仔细考察大小一致性问题。
大小一致性也是满足的但对于某些截断的对于FCI,大小致性也是满足的,但对于某些截断的Fock空间问题,大小一致性要求是不满足的。
相应的这些近似线性变分方法就不适合应用于研究大体系。
正则哈特里‐福克理论我们可以通过变分方法求解HF方程。
利用变分方法求解闭壳层HF方程得到的多电子状态称为HF态。
HF态是一个变分优化的行列式,这样的波函数代表电子作为独立粒子运动分优化的行列式这样的波函数代表电子作为独立粒子运动的状态。
这样的一个状态可以通过求解有效单电子薛定谔方程得到一组单电子波函数,然后对N个独立的有效哈密顿量的本征函数反对称化得到。