清华大学弹性力学-有限元法1
- 格式:pdf
- 大小:5.75 MB
- 文档页数:32
通俗地说,有限元法就是一种计算机模拟技术,使人们能够在计算机上用软件模拟一个工程问题的发生过程而无需把东西真的做出来。
这项技术带来的好处就是,在图纸设计阶段就能够让人们在计算机上观察到设计出的产品将来在使用中可能会出现什么问题,不用把样机做出来在实验中检验会出现什么问题,可以有效降低产品开发的成本,缩短产品设计的周期。
有限元法也叫有限单元法(finite element m ethod, FEM),是随着电子计算机的发展而迅速发展起来的一种弹性力学问题的数值求解方法。
五十年代初,它首先应用于连续体力学领域—飞机结构静、动态特性分析中,用以求得结构的变形、应力、固有频率以及振型。
由于这种方法的有效性,有限单元法的应用已从线性问题扩展到非线性问题,分析的对象从弹性材料扩展到塑性、粘弹性、粘塑性和复合材料,从连续体扩展到非连续体。
有限元法最初的思想是把一个大的结构划分为有限个称为单元的小区域,在每一个小区域里,假定结构的变形和应力都是简单的,小区域内的变形和应力都容易通过计算机求解出来,进而可以获得整个结构的变形和应力。
事实上,当划分的区域足够小,每个区域内的变形和应力总是趋于简单,计算的结果也就越接近真实情况。
理论上可以证明,当单元数目足够多时,有限单元解将收敛于问题的精确解,但是计算量相应增大。
为此,实际工作中总是要在计算量和计算精度之间找到一个平衡点。
有限元法中的相邻的小区域通过边界上的结点联接起来,可以用一个简单的插值函数描述每个小区域内的变形和应力,求解过程只需要计算出结点处的应力或者变形,非结点处的应力或者变形是通过函数插值获得的,换句话说,有限元法并不求解区域内任意一点的变形或者应力。
大多数有限元程序都是以结点位移作为基本变量,求出结点位移后再计算单元内的应力,这种方法称为位移法。
有限元法本质上是一种微分方程的数值求解方法,认识到这一点以后,从70年代开始,有限元法的应用领域逐渐从固体力学领域扩展到其它需要求解微分方程的领域,如流体力学、传热学、电磁学、声学等。

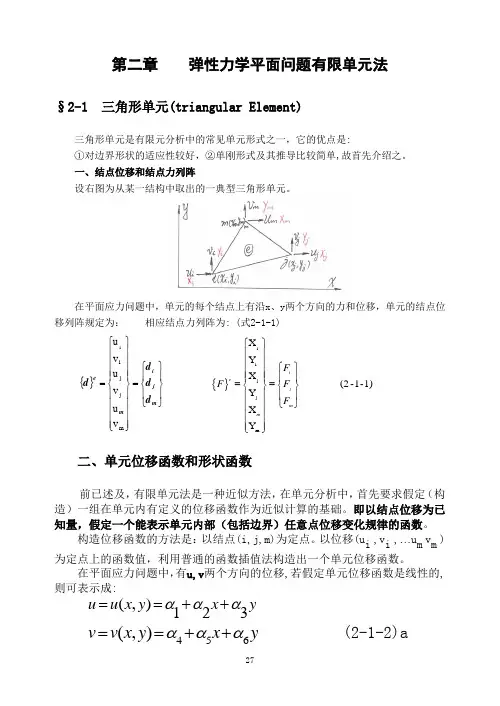
第二章 弹性力学平面问题有限单元法§2-1 三角形单元(triangular Element)三角形单元是有限元分析中的常见单元形式之一,它的优点是:①对边界形状的适应性较好,②单刚形式及其推导比较简单,故首先介绍之。
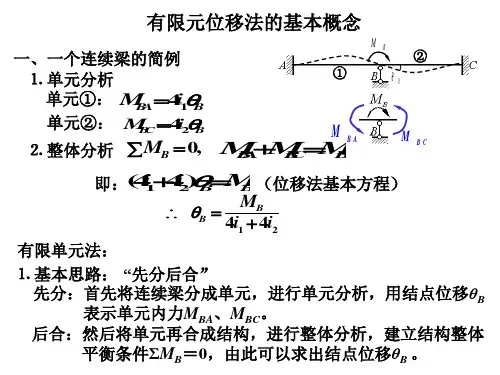
一、结点位移和结点力列阵设右图为从某一结构中取出的一典型三角形单元。
在平面应力问题中,单元的每个结点上有沿x 、y 两个方向的力和位移,单元的结点位移列阵规定为: 相应结点力列阵为: (式2-1-1)二、单元位移函数和形状函数前已述及,有限单元法是一种近似方法,在单元分析中,首先要求假定(构造)一组在单元内有定义的位移函数作为近似计算的基础。
即以结点位移为已知量,假定一个能表示单元内部(包括边界)任意点位移变化规律的函数。
构造位移函数的方法是:以结点(i,j,m)为定点。
以位移(u i ,v i ,…u m v m )为定点上的函数值,利用普通的函数插值法构造出一个单元位移函数。
在平面应力问题中,有u,v 两个方向的位移,若假定单元位移函数是线性的,则可表示成:(,)123u u x y x y ααα==++546(,)v v x y x y ααα==++ (2-1-2)a{}⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=m j i m ed d d d m j j i v u v u v u i {}ii j j m X Y X (2-1-1)Y X Y iej m m F F F F ⎧⎫⎪⎪⎪⎪⎧⎫⎪⎪⎪⎪⎪⎪==⎨⎬⎨⎬⎪⎪⎪⎪⎩⎭⎪⎪⎪⎪⎪⎪⎩⎭式中的6个待定常数α1 ,…, α6 可由已知的6个结点位移分量(3个结点的坐标)确定。
将3个结点坐标(x i,y i ),(x j,y j ),(x m,y m )代入上式得如下两组线性方程:123i i i u x y ααα=++123j j j u x y ααα=++ (a)123m m m u x y ααα=++和546i i i v x y ααα=++546j j j v x y ααα=++ (b)546m m m v x y ααα=++利用线性代数中解方程组的克来姆法则,由(a)可解出待定常数1α 、2α 、3α :11A Aα=22A Aα=33A Aα=式中行列式:1i i i j j j m m m u x y A u x y u x y =2111i i j j m mu y A u y u y =3111i i j jm mx u A x u x u =2111i i j j m mAx y A x y x y ==A 为△ijm 的面积,只要A 不为0,则可由上式解出:11()2m m i ij j a u a u a u A α=++ 21()2m m i ij j bu b u b u A α=++ (C )31()2m mi i j j c u c u c u A α=++式中:m m i j j a x y x y =- m m j i i a x y x y =- m i j j i a x y x y =-m i j b y y =- m j i b y y =- m i j b y y =- (d )m i j c x x =- m j i c x x =- m j i c x x =-为了书写方便,可将上式记为:m m i j i a x y x y =-m ij by y =- (,,)i j mm i jc x x =-(,,)i j m表示按顺序调换下标,即代表采用i,j,m 作轮换的方式便可得到(d)式。