混合驱动踝足假肢阻抗控制方法
- 格式:pdf
- 大小:767.43 KB
- 文档页数:5
毕业设计说明书系(专业):自动化专业题目:智能下肢假肢膝踝协调控制方法研究目录1 引言 (1)1.1 选题的目的和意义 (1)1.2 智能假肢国内外发展现状 (1)1.3 课题研究内容 (2)2 膝踝协调控制器的硬件设计 (3)2.1 控制芯片MSP430简介 (3)2.2 硬件电路分析与设计 (4)2.3 小结 (8)3 膝、踝关节针阀开度曲线的测定 (8)3.1 测试方案设计 (8)3.2 MFC测试程序设计 (9)3.3 小结 (12)4 膝踝协调控制算法设计 (12)4.1 控制策略的选择 (12)4.2 控制系统软件设计 (14)4.3 小结 (17)结论 (18)参考文献 (19)致谢 (21)附录A 部分软件程序 (22)图1 膝踝协调控制器原理图 (28)1 引言1.1 选题的目的和意义假肢是为了恢复人体的形态和功能,补偿截肢造成的缺损而制作和装配的人工肢体。
为了提高残疾人特别是肢体残疾者的生活水平,假肢的研究显得尤为重要。
其中下肢截肢者丧失了最基本的行走能力,安装假肢是补偿其运动功能的最佳途径。
智能假肢的出现对于帮助残疾人回归到正常生活、学习和工作中,对于减轻社会负担无疑都具有重要的意义。
1.2 智能假肢国内外发展状况1.2.1 国外发展状况在很早的时候,各国都产生过木头制成的假肢。
但从真正意义上现代的假肢来说,国外假肢技术发展的较早。
早在19世纪60年代,欧洲人就发明了首个人工假肢。
到了20世纪初期,由于世界大战的爆发欧美国家都开始研究假肢,但是这时其发展主要是为了那些肢体伤残的军人。
战争结束以后,假肢行业得到了很大发展,西方发达国家纷纷成立了假肢研究所,掀起了假肢技术发展的小高潮。
这一时期的假肢均为纯机械式假肢,通过弹簧、液压缸、气压缸提供阻尼,根据残疾人的日常行走习惯再通过手动调节阻尼。
这种假肢步态不协调,路况适应能力差,不具有步速跟随功能。
随着各国的研究发展,到了九十年代左右,出现了智能假肢。
主被动踝关节假肢与控制方法试验研究踝关节假肢是生物工程学和康复机器人领域中的热点课题,这种假肢可以有效的为小腿截肢患者补偿运动能力。
在国家自然科学基金(91748110)和(51275170)的支持下,进行了对踝关节假肢的研究。
为了使假肢具有正常人踝关节的行走特性,本课题开展了对人体行走过程中踝关节生物力学特性的分析,和对步态周期合理划分的研究,采用串联弹性执行器(SEA)和并联弹簧共同驱动的结构设计,研制了一种主被动混合驱动的踝关节假肢试验样机。
根据人体踝关节的运动特性,提出了一种基于有限状态机和模糊PID的控制方案。
通过对假肢的运动学分析,在MATLAB的Simulink环境中分别建立了角度与力矩控制仿真系统。
在此基础上,研制了一套基于STM32F103单片机的控制器硬件结构与软件系统,实现了传感器信号的采集,控制算法的编程和电机的伺服控制。
试验结果表明,试验样机的角度控制和有限状态机控制可以得到类似人体踝关节运动的角度曲线,并且根据传感器信息可以实现不同运动阶段之间的切换,基本满足截肢患者的运动需求。
控制系统的仿真结果与样机的试验验证了样机结构设计的合理性和控制方案的可行性,为进一步实现样机的应用提供了依据。
基于神经肌肉模型的动力脚踝假肢控制方略摘要在脚踝假肢的发展过程中,人们希望假肢能够拥有与人类脚踝相似的动力系统。
实现这一目的的一个简单方法是轨迹跟踪,当知道具体期望的力矩时,控制器发出命令使得假肢尽可能的接近步行轨迹。
然而,若不能够及时获取更新所期望的力矩,这种方法就有其局限性,因为它不能适应外部地形的变化。
适应性在假肢领域至关重要。
假肢必须能够适应地形和穿戴者的行为的变化。
5. 控制系统的设计为了对第三章中详细介绍的肌肉反射模型进行客观的评价,首先有必要确保机械系统能够尽可能的跟踪期望的轨迹。
越来越清晰的是,经过开环阶跃响应实验,图4—19所示的传动系统中内部摩擦在没有误差补偿的情况下可能影响控制系统扭矩控制精度。
为了抑制干扰,我们也需要一个扭矩反馈控制器。
因此,我们设计了一个控制系统,此控制系统集成了标准的反馈控制,前馈校正,最后还有一个专门的力矩反馈装置来校正摩擦带来的影响。
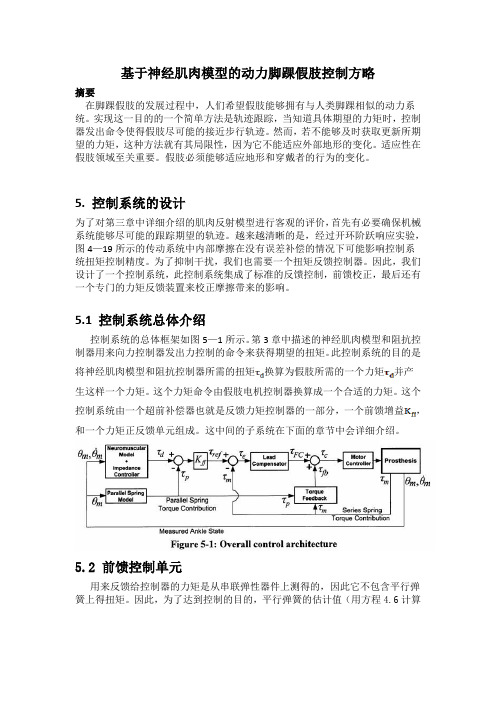
5.1 控制系统总体介绍控制系统的总体框架如图5—1所示。
第3章中描述的神经肌肉模型和阻抗控制器用来向力控制器发出力控制的命令来获得期望的扭矩。
此控制系统的目的是将神经肌肉模型和阻抗控制器所需的扭矩换算为假肢所需的一个力矩并产生这样一个力矩。
这个力矩命令由假肢电机控制器换算成一个合适的力矩。
这个控制系统由一个超前补偿器也就是反馈力矩控制器的一部分,一个前馈增益,和一个力矩正反馈单元组成。
这中间的子系统在下面的章节中会详细介绍。
5.2 前馈控制单元用来反馈给控制器的力矩是从串联弹性器件上测得的,因此它不包含平行弹簧上得扭矩。
因此,为了达到控制的目的,平行弹簧的估计值(用方程4.6计算得到)是从神经肌肉模型所需的力矩中减去执行器产生的力矩,利用假肢上霍尔传感器测得的脚踝角度。
然后前馈增益应用于执行器最终的力矩信号来获得——反馈控制器的参考力矩。
的值通过图5-3中所示的闭环阶跃响应试验的稳态增益的倒数来确定。
结果是,我们用代替积分器和滞后补偿器来降低稳态误差。

下肢假肢的使用训练方法
下肢假肢是一种帮助失去下肢的人恢复正常生活功能的设备。
然而,使用下肢假肢需要进行一些训练和适应,以确保使用者能够控制和支撑假肢,并避免不必要的压力和疲劳。
下肢假肢的使用训练方法如下:
1. 了解假肢的组成和结构
在使用假肢前,使用者应该了解假肢的组成和结构,以便更好地理解如何使用假肢,并更有效地进行训练。
2. 学习正确的姿势和步态
使用者应该学习正确的姿势和步态,以确保假肢的支撑和平衡。
这包括站立、行走和爬楼梯等行动。
3. 逐步增加使用时间和活动范围
使用者应该逐步增加假肢的使用时间和活动范围,以适应假肢的重量和运动。
开始时,使用者可以进行简单的活动,如坐立转移和短距离行走,逐渐增加到长距离行走和运动。
4. 进行平衡和稳定性训练
使用者需要进行平衡和稳定性训练,以确保假肢的支撑和平衡。
这可以通过站立、单脚站立和转身等练习来实现。
5. 进行力量和耐力训练
使用者需要进行力量和耐力训练,以适应假肢的运动和活动。
这可以通过走路、爬楼梯和慢跑等练习来实现。
总之,使用下肢假肢需要进行适当的训练和适应,以确保使用者能够正确地控制和支撑假肢,并避免不必要的压力和疲劳。
这些训练方法可以帮助使用者更好地适应下肢假肢,并恢复正常生活功能。

假肢运动控制系统的设计与实现第一章绪论假肢作为一种替代人体肢体功能的医疗工程产品,拥有着广阔的市场空间。
近年来,随着人工智能、机器视觉等技术的不断发展,假肢智能化已经成为了假肢技术的主要发展方向之一。
而假肢运动控制系统作为假肢智能化的核心技术,也受到了越来越多的重视。
本文将详细介绍假肢运动控制系统的设计与实现。
第二章假肢运动学和动力学模型假肢运动学和动力学模型是假肢运动控制的基础。
假肢运动学模型主要研究关节运动规律和关节角度的计算,动力学模型则研究假肢的力学特性、角速度、角加速度、力矩等相关参数。
根据假肢使用者的身体特征,可以建立相应的运动学和动力学模型,并据此设计假肢运动控制系统。
第三章传感器采集技术假肢运动控制系统需要对使用者的肌肉信号、运动姿态、环境信息等进行实时采集。
传感器采用技术是实现假肢运动控制系统的关键技术之一。
传感器的种类包括肌电传感器、陀螺仪、加速度计和力传感器等。
通过采集传感器信号,可以计算出肢体的运动状态,并据此控制假肢的运动。
第四章控制算法设计假肢运动控制系统的核心在于控制算法的设计。
传统的控制算法包括PID控制算法、模糊控制算法等。
现代控制算法则包括神经网络控制算法、遗传算法、粒子群优化算法等。
根据假肢的运动学和动力学模型,可以设计出相应的控制算法,并利用传感器对假肢的运动进行实时调整和优化。
此外,控制算法的实现过程中需要考虑到实时性和稳定性的问题,以保证假肢运动控制的准确和稳定。
第五章硬件系统设计假肢运动控制系统的硬件系统包括电机、减速器、控制器等,这些硬件设备必须能够与控制算法进行有效的协调和配合。
电机和减速器的选择需要根据假肢的运动特性和力学特性进行考虑,控制器则需要具备较高的计算处理能力和实时性。
除此之外,还需要考虑硬件系统的可靠性和安全性,以确保假肢在使用过程中安全可靠。
第六章实验结果分析通过实验验证假肢运动控制系统的性能表现和稳定性,并进行测试和数据分析。
实验结果对于假肢运动控制算法的优化和系统的后续改进都具有重要意义。
假肢关节的控制技术假肢关节的控制技术①简单机械装置在组件式假肢出现的早期膝关节一般以单轴为主。
这种关节结构简单,制造容易,成本低廉。
但是人体生理膝关节是一个复合关节。
它转动的同时还具有水平运动。
所以这种关节逐步被多轴膝关节所取代②连杆结构这种关节就是在研究人体生理关节的复合运动的基础上设计出来的。
这种设计使得患者在足跟着地时能保持稳定,在离地时,残肢较小的力量就能使关节屈曲。
坐下时也不会在外观上发生问题。
通常这种关节在膝关节中应用最多的就是四连杆结构,随科技的发展,德林的五连杆机构及奥索的七连杆结构关节相继问世,更好的模仿了人体的膝关节功能。
摆动期控制装置液压控制装置它利用液压油的特性,通过对油路进行调节来控制活塞运动。
以达到理想的小腿运动。
但是液压装置的油路特性影响膝关节的响应速度。
当患者调整步态,想加快行走速度,用力迈出大腿时,膝关节的屈曲速度增加,油路中油反向运动的速度也增加。
所受阻力也增大,从而限制了膝关节的屈曲。
受温差影响大!温度低时,液体变稠,摆动阻力增大,迈腿费力,短残肢很难踢动。
气压控制装置气压控制装置与液压控制装置原理相同。
改变了液压装置在调整步态时限制膝关节屈曲的缺点,而且与液压膝关节相比,减轻了重量,减少了故障率。
膝关节的机械控制方法自动锁定式(直立自锁膝关节)这种关节在摆动期结束、膝关节完全伸直后自动锁定。
支撑期结束后关节锁定自动解除。
它具有支撑期锁定,摆动期可自由屈膝的特点。
直立自锁膝关节承重自锁式在承重的情况下,大腿向小腿部分加压,轴承加紧膝轴。
膝轴不能转动。
在免荷状态下,轴承松开,膝关节可自由旋转。
——每款关节都应具备的功能支撑期控制小结支撑期控制方式基本上是利用肌力进行随意控制(残肢压接受腔后壁)除了自动锁定装置的膝关节之外,其它结构的关节多少都需要肌力来控制。
也就是说完全不用担心打软腿的安全膝关节只有自动锁定式(直立自锁膝关节)膝关节一种。
与单轴膝关节相比,多轴膝关节在支撑期稳定,且易于向摆动期过度。
第44卷第1期2020年2月南京理工大学学报JournalofNanjingUniversityofScienceandTechnologyVol.44No.1Feb.2020㊀收稿日期:2019-07-26㊀㊀修回日期:2019-10-09㊀基金项目:河南省科技厅项目(142102310226)ꎻ河南省教育厅科学技术研究重点项目(13B460962)㊀作者简介:彭二宝(1982-)ꎬ男ꎬ博士生ꎬ副教授ꎬ主要研究方向:机械电子工程㊁CAD/CAM等控制与应用ꎬE ̄mail:ying1001@163.comꎻ通讯作者:陈昌铎(1987-)ꎬ男ꎬ助教ꎬ主要研究方向:机器人㊁电气控制与应用ꎬE ̄mail:ccd1987@163.comꎮ㊀引文格式:彭二宝ꎬ陈昌铎.基于阻抗的下肢康复外骨骼力与位置控制研究[J].南京理工大学学报ꎬ2020ꎬ44(1):21-25.㊀投稿网址:http://zrxuebao.njust.edu.cn基于阻抗的下肢康复外骨骼力与位置控制研究彭二宝1ꎬ2ꎬ陈昌铎2(1.武汉理工大学机电工程学院ꎬ湖北武汉430000ꎻ2.河南工业职业技术学院河南南阳473000)摘㊀要:为了提升下肢功能损伤患者舒适性和康复效果ꎬ弥补常规位置控制的不足ꎬ研究了一种基于力与位置阻抗控制的下肢康复外骨骼ꎮ利用气体的柔顺性和安全性ꎬ采用气动比例技术ꎬ以标准步态曲线为参考ꎬ以人机交互力矩为约束ꎬ实时控制ꎮ建立人机动力学模型ꎬ搭建实验平台ꎬ实现机构仿人步态行走ꎮ实验表明ꎬ该系统控制效果好ꎬ跟踪精度高ꎮ人机交互力矩得到有效调整ꎬ进一步提升系统安全性㊁舒适性和稳定性ꎮ关键词:下肢康复外骨骼ꎻ力与位置控制ꎻ阻抗控制ꎻ气压驱动ꎻ仿人步态中图分类号:TP242ꎻTP273㊀㊀文章编号:1005-9830(2020)01-0021-05DOI:10.14177/j.cnki.32-1397n.2020.44.01.004ForceandpositioncontrolforlowerlimbrehabilitationexoskeletonbasedonimpedancePengErbao1ꎬ2ꎬChenChangduo2(1.SchoolofMechanicalandElectricalEngineeringꎬWuhanUniversityofTechnologyꎬWuhan430000ꎬChinaꎻ2.HenanPolytechnicInstituteꎬNanyang473000ꎬChina)Abstract:Inordertoimprovethecomfortandrehabilitationeffectofpatientswithlowerlimbfunc ̄tionalinjuryꎬandmakeupfortheconventionalpositioncontrolꎬalowerlimbrehabilitationexoskeletonbasedonforceandpositionimpedancecontrolisdesigned.Usingtheflexibilityandsafetyofgasandbasedonpneumaticproportionaltechnologyꎬitcanbecontrolledreal ̄timeꎬwhichtakesstandardgaitcurveasreferenceandhuman ̄computerinteractionmomentasconstraint.Thehuman ̄machinedynamicmodelisestablishedꎬtheexperimentalplatformwasbuiltꎬandthehumanoidwalkingwasrealized.Theexperimentalresultsshowthatthecontroleffectisgoodꎬthetrackingpreci ̄sionishighꎬtheman ̄machineinteractiontorqueiseffectivelyadjustedꎬandthesystemsafetyꎬcomfort南京理工大学学报第44卷第1期andstabilityarefurtherimproved.Keywords:lowerlimbrehabilitationexoskeletonꎻforceandpositioncontrolꎻimpedancecontrolꎻpneumaticdriveꎻhumanoidgait㊀㊀中国逐步进入老龄化社会ꎬ脑卒中风患者日益增多ꎮ公安部交通管理局官方微博发布统计数据截止2018年12月31日机动车保有量已达3.27亿辆ꎬ交通事故等意外因素也进一步加剧此类患者的人数ꎮ步态康复训练是一种专门治疗由脑卒㊁中风或者交通事故等而引起的下肢损伤临床康复疗法ꎮ国内外康复医学研究和临床实验表明步态康复训练可以有效恢复患者的机能ꎬ提升步行能力和生活质量[1]ꎮ在保持患者自身平衡的前提下ꎬ借助自动化设备ꎬ通过正常人的步态轨迹引导患者行走ꎬ从而改善步态和恢复下肢机能ꎮ传统的治疗是医疗师依靠经验指导和辅助患者运动ꎬ治疗效果参差不齐ꎮ融合机器人技术与康复医学的下肢康复外骨骼的出现ꎬ既降低了医疗师的劳动强度ꎬ又能改善医疗资源不足的困境ꎮ下肢康复外骨骼目前主要采用由电机和气动两种驱动方式ꎮ目前国外已经出现投入市场的下肢外骨骼ꎬ典型代表是瑞士的Lokomat采用电机驱动ꎬ基于阻抗原理ꎬ采用双闭环控制ꎬ内外环实现力和轨迹跟踪ꎬ但是需要患者去适应外骨骼的轨迹[2]ꎮ位置控制满足一定场合ꎬ例如搬运㊁焊接和喷漆机器人ꎮ当机器人与外界接触或输出力时ꎬ单靠末端运动位置控制是不够的ꎬ这需要考虑机器人与环境的相互作用ꎮ阻抗控制常用来实现位置与力的控制ꎬHongan[3]提出机械手阻抗控制方法ꎬ通过控制机械手的位移ꎬ达到控制机械手与外界作用力的目的ꎮJamwal等[4]开发了一种基于阻抗控制的踝关节康复机器人ꎮAyas等[5]研究了一种两自由度冗余踝关节康复外骨骼ꎬ采用自适应导纳控制ꎬ减少外部干扰对轨迹跟踪的影响ꎮ目前国内下肢外骨骼研究也取得了一定的成果ꎬ但基本还在实验室阶段ꎬ没有通过临床试验和投放市场ꎮ由于气体的柔顺性和安全性ꎬ可以有效地克服电机驱动的不足ꎬ因此本文以基于气动比例技术的下肢康复外骨骼为平台ꎬ采用阻抗控制策略ꎬ实时控制下肢康复训练中的力与位置ꎬ有效地调整人机交互力的大小ꎬ提高康复训练效果ꎬ恢复下肢步行能力ꎮ1㊀下肢外骨骼系统设计人体正常步态行走主要是依靠髋关节㊁膝关节和踝关节3个关节完成ꎮ研究的下肢康复外骨骼机构原理如图1所示ꎮ图1㊀下肢康复外骨骼机构图人体的髋关节和踝关节都具有伸屈和内收外展两个自由度ꎬ膝关节只有伸屈一个自由度[6]ꎮ设计将髋关节和膝关节的伸屈为主动自由度ꎬ运动角度大采用气缸驱动ꎬ内收外展为被动自由度使用关节轴承连接ꎬ保证随动ꎬ降低摩擦ꎬ踝关节采用人工肌肉驱动ꎮ外骨骼与下肢之间通过医用绑带固定ꎬ既能够传递力矩ꎬ同时又缓对解患者腿部的压迫ꎮ系统主要包括气缸㊁气动比例方向阀㊁PLC㊁计算机㊁位移和力传感器ꎬ原理如图2所示ꎮ计算机作为上位机ꎬPLC作为下位机ꎬ两者共同组成控制器ꎮ采用西门子S7 ̄1200型号的PLCꎬ自带A/D和D/Aꎬ具有强大的运动控制模块和功能ꎬ选用FESTO的比例方向阀ꎬ可将输入信号转换成阀开口大小ꎬ与外部的力和位移传感器组合ꎬ形成一个精确的气动控制系统ꎬ实现快速精确控制ꎬ同时又增强系统的安全性和稳定性ꎮ系统基本满足仿人步态行走训练要求ꎬ提升了系统的安全性㊁舒适性㊁柔顺性和康复效果ꎮ22总第230期彭二宝㊀陈昌铎㊀基于阻抗的下肢康复外骨骼力与位置控制研究㊀㊀图2㊀下肢外骨骼髋膝关节控制原理2㊀人机动力学模型与控制策略基于标准步态轨迹的下肢康复外骨骼往往采用被动康复模式ꎬ将人体与外骨骼当做一体ꎬ忽视了人体与外骨骼之间力的交互耦合ꎬ大大减弱了肌肉锻炼的效果ꎮ阻抗中ꎬ系统通过运动变化来实现接触力的控制ꎮ人机交互力Fe与关节角度误差θd-θ有关ꎬ因此人机交互阻抗控制模型[7]为㊀Md(㊆θd-㊆θ)+Bd(̇θd-̇θ)+Kd(θd-θ)=Fe(1)式中:Md㊁Bd㊁Kd分别为人机交互期望惯量对角矩阵㊁阻尼对角矩阵和刚度对角矩阵ꎬθd和θ分别为期望和实际的关节角度值ꎬFe为人机交互力ꎮ令θf=θd-θꎬ并对式(1)进行拉氏变换[8]ꎬ得㊀Θf(s)=Fe(s)Mds2+Bds+Kd(2)由于阻尼控制是在笛卡尔坐标系实现ꎬ结合机器人动力学方程ꎬ得出人机交互作用下的下肢外骨骼动力学方程[9]为㊀D(θ)㊆θ+H(θꎬ̇θ)+G(θ)=Fd(3)式中:D为惯性矩阵ꎬH为离心力和科氏力矢量ꎬG为重力矢量ꎬFd为外骨骼期望驱动力ꎮ关节空间机器人关节力矩与力F函数关系为[8]㊀=JTF㊀(4)式中:JT是机器人力雅克比矩阵ꎬ为速度雅克比矩阵的转置ꎬ与下肢康复外骨骼的几何参数有关ꎬ通过式(4)ꎬ可以求解各个关节力矩ꎮ控制主要由两部分组成ꎬ内环采用增量式PID控制角度ꎬ通过TIAPortalV15软件整定功能整定PID参数[9]ꎬ外环为力控制ꎬ下肢外骨骼力与位置阻抗控制原理[11-12]ꎬ如图3所示ꎮ给定期望关节角度值ꎬ通过两自由度的外骨骼逆动力学方程可以求出期望的驱动力Fdꎮ将力传感器反馈的信息ꎬ通过阻抗控制器转化为角度修正量θfꎬ与期望值θd作为内环的输入ꎬ控制气缸运动ꎬ智能调节标准步态曲线ꎬ以适应不同患者的需求ꎬ从而提高康复效果ꎮ图3㊀下肢外骨骼力与位置阻抗控制原理通过中国科学院自动化研究所提供CASIA步态数据库和上海大学OptotrakCertus主动式光学运动捕捉系统捕捉的角度曲线[13]ꎬ获得一个行走步态周期髋膝踝3个关节的标准步态曲线ꎬ如图4所示ꎮ图4中ꎬT为一个步态周期ꎮ32南京理工大学学报第44卷第1期图4㊀标准步态曲线3㊀下肢康复外骨骼实验与数据分析依据系统设计ꎬ搭建实验平台ꎬ如图5所示ꎮ系统主要通过控制双腿髋膝4个关节的运动ꎬ实现机构仿人步态行走ꎮ下肢康复外骨骼应用对象是下肢机能功能损伤的患者ꎬ因此试验设定的步态周期为7sꎬ连续采集两个周期的信息ꎮ实验样本是选取的身高175cmꎬ体重70kg的男性ꎮ数据采集和处理主要是借助西门子PLC1200硬件中A/D和D/A模块以及博途TIPV15软件编程进行数据采集和分析ꎮ图5㊀实验平台位置控制的轨迹曲线如图6所示ꎬ力与位置控制轨迹曲线如图7所示ꎮ同一个时间内ꎬ右腿采用常规的PID位置控制ꎬ左腿采用力与位置的阻抗控制ꎮ由于气体的可压缩性和空气压缩机作为气源存气量有限ꎬ实际的关节角度曲线与目标曲线相比ꎬ存在一定的滞后ꎬ但提高康复的安全性和柔顺性ꎬ整体曲线满足康复需求ꎮ采用力与位置的阻抗控制曲线更加柔滑ꎬ在关节最大角度处ꎬ跟踪效果好ꎬ跟踪最大误差为ʃ3ʎꎮ两种控制方式下膝和髋关节人机交互的力矩分别如图8和9所示ꎮ人机交互力矩均有所下降ꎬ下降约40%ꎮ髋关节与膝关节存在一定耦合ꎬ在第一个步态周期人机交互过程有一个适应的过程ꎬ力矩曲线存在轻微震荡ꎬ在第二个步态周期力矩曲线趋于平衡柔顺ꎮ图6㊀右腿双关节角度曲线图7㊀左腿双关节角度曲线图8㊀膝关节力矩对比图9㊀髋关节力矩对比4㊀结束语本文针对下肢机能功能损伤的患者ꎬ以气动为平台ꎬ基于力与位置阻抗控制ꎬ以标准步态曲线42总第230期彭二宝㊀陈昌铎㊀基于阻抗的下肢康复外骨骼力与位置控制研究㊀㊀位置控制为参考ꎬ以人机相互力矩为约束ꎬ实现机构仿人步态行走ꎬ相对于常规的位置控制ꎬ跟踪精度得到提升ꎬ人机交互力矩得到降低ꎬ系统的安全性㊁舒适性和稳定性得到提高ꎬ从而加快患者肢体的康复进程ꎮ参考文献:[1]㊀DzahirMAM.Recenttrendsinlower ̄limbroboticrehabilitationorthosis:Controlschemeandstrategyforpneumaticmuscleactuatedgaittrainers[J].Roboticsꎬ2014ꎬ3(1):120-148.[2]JezernikSꎬColomboGꎬMorariM.Automaticgait ̄patternadaptationalgorithmsforrehabilitationwitha4 ̄DOFroboticorthosis[J].IEEETransactionsonRoboticsandAutomation2004ꎬ20(3):574-582. [3]HoganN.Impedancecontrol:Anapproachtomanipu ̄lation[C]//AmericanControlConference.SanDiegoꎬUSA:IEEEꎬ1984:304-313.[4]JamwalPKꎬHussainSꎬGhayeshMHꎬetal.Impedancecontrolofanintrinsicallycompliantparallelanklerehabilitationrobot[J].IEEETransactionsonIndustrialElectronicsꎬ2016ꎬ63(6):3638-3647. [5]AyasMSꎬAltasIH.Fuzzylogicbasedadaptiveadmittancecontrolofaredundantlyactuatedanklerehabilitationrobot[J].ControlEngineeringPracticeꎬ2017ꎬ59:44-54.[6]李杨ꎬ管小荣ꎬ徐诚.基于人体步态的下肢外骨骼动力学仿真研究[J].南京理工大学学报ꎬ2015ꎬ39(3):353-357.LiYangꎬGuanXiaorongꎬXuCheng.Dynamicssimulationoflowerextremityexoskeletonbasedonhumangait[J].JournalofNanjingUniversityofScienceandTechnologyꎬ2015ꎬ39(3):353-357. [7]GeSSꎬLeeTHꎬHarrisCJ.Adaptiveneuralnetworkcontrolofroboticmanipulators[M].London:WorldScientificꎬ1998.[8]丁润泽.基于阻抗控制的机器人力控制技术研究[D].哈尔滨:哈尔滨工业大学航天学院ꎬ2018. [9]韩建海.工业机器人技术[M].武汉:华中科技大学出版社ꎬ2019.[10]张丽香ꎬ王晓伟ꎬ降爱琴.二自由度模型驱动PID控制系统参数整定方法及应用[J].南京理工大学学报ꎬ2014ꎬ38(4):476-480.ZhangLixiangꎬWangXiaoweiꎬJiangAiqin.ParametertuningmethodfortwodegreeoffreedommodeldrivenPIDcontrolanditsapplication[J].JournalofNanjingUniversityofScienceandTechnologyꎬ2014ꎬ38(4):476-480.[11]李洪梅ꎬ高媛ꎬ陈向坚.基于二型模糊神经网络的不确定混沌系统鲁棒性自适应控制[J].南京理工大学学报ꎬ2019ꎬ43(4):432-438.LiHongmeiꎬGaoYuanꎬChenXiangjian.IntervaltypeⅡfuzzyneuralnetworkcontrolbasedrobustadaptiveforthesynchronizationofuncertainchaoticsystems[J].JournalofNanjingUniversityofScienceandTechnologyꎬ2019ꎬ43(4):432-438.[12]王纪伟ꎬ陈刚ꎬ汪俊.基于模糊免疫PID的驾驶机器人车辆路径及速度跟踪控制[J].南京理工大学学报ꎬ2017ꎬ41(6):686-692.WangJiweiꎬChenGangꎬWangJun.VehiclepathandspeedtrackingcontrolofrobotdriverbasedonfuzzyimmunePID[J].JournalofNanjingUniversityofScienceandTechnologyꎬ2017ꎬ41(6):686-692. [13]王企远.步态康复训练机器人助行腿的步态规划与运动控制设计[D].上海:上海大学机电工程与自动化学院ꎬ2011.52。