阻抗控制介绍
- 格式:ppt
- 大小:1.76 MB
- 文档页数:20

随着 PCB 信号切换速度不断增长,当今的 PCB 设计厂商需要理解和控制 PCB 迹线的阻抗。
相应于现代数字电路较短的信号传输时间和较高的时钟速率,PCB 迹线不再是简单的连接,而是传输线。
在实际情况中,需要在数字边际速度高于1ns 或模拟频率超过300Mhz时控制迹线阻抗。
PCB 迹线的关键参数之一是其特性阻抗(即波沿信号传输线路传送时电压与电流的比值)。
印制电路板上导线的特性阻抗是电路板设计的一个重要指标,特别是在高频电路的PCB 设计中,必须考虑导线的特性阻抗和器件或信号所要求的特性阻抗是否一致,是否匹配。
这就涉及到两个概念:阻抗控制与阻抗匹配,本文重点讨论阻抗控制和叠层设计的问题。
阻抗控制阻抗控制(eImpedance Controling),线路板中的导体中会有各种信号的传递,为提高其传输速率而必须提高其频率,线路本身若因蚀刻,叠层厚度,导线宽度等不同因素,将会造成阻抗值得变化,使其信号失真。
故在高速线路板上的导体,其阻抗值应控制在某一范围之内,称为“阻抗控制”。
PCB 迹线的阻抗将由其感应和电容性电感、电阻和电导系数确定。
影响PCB走线的阻抗的因素主要有: 铜线的宽度、铜线的厚度、介质的介电常数、介质的厚度、焊盘的厚度、地线的路径、走线周边的走线等。
PCB 阻抗的范围是 25 至120 欧姆。
在实际情况下,PCB 传输线路通常由一个导线迹线、一个或多个参考层和绝缘材质组成。
迹线和板层构成了控制阻抗。
PCB 将常常采用多层结构,并且控制阻抗也可以采用各种方式来构建。
但是,无论使用什么方式,阻抗值都将由其物理结构和绝缘材料的电子特性决定:信号迹线的宽度和厚度迹线两侧的内核或预填材质的高度迹线和板层的配置内核和预填材质的绝缘常数PCB传输线主要有两种形式:微带线(Microstrip)与带状线(Stripline)。
微带线(Microstrip):微带线是一根带状导线,指只有一边存在参考平面的传输线,顶部和侧边都曝置于空气中(也可上敷涂覆层),位于绝缘常数 Er 线路板的表面之上,以电源或接地层为参考。

PCB阻抗PCB阻抗控制,在PCB设计中经常遇到阻抗计算,但是我不明白阻抗计算是计算整板PCB的阻抗还是几个部分的阻抗PCB阻抗,在PCB设计中经常遇到阻抗计算,但是我不明白阻抗计算是计算整板PCB的阻抗还是几个部分的阻抗:如我有差分阻抗,单线阻抗。
那到底该采用哪些数值呢?可能几个部分的阻抗都不一样在同一PCB板上?这样的话该计算哪个阻抗来作为PCB的阻抗呢!完整性最佳。
是不是每个地方阻抗不一样,我得告诉PCB厂商,这个地方阻抗做多少,哪个地方阻抗做多少啊,比如:USB2.0差分做成90欧姆,DDR与DSP连接线做成多少欧姆,和时钟线做成多少欧姆等等啊?这样的话是不是要详细说明多处的阻抗要求。
关键布线部分是要给出详细的设计要求的,设计时的阻抗大小,是通过仿真软件,使信号完整性达到最好状态下,得到的。
根据仿真结果,可以得到该信号线的线长,线宽,线间距,在那层布线,串接多大的匹配电阻等要求,然后仿真设计人员将此仿真结果交给PCB LAUOUT设计人员,PCB LAUOUT设计人员会根据此要求进行PCB布线设计,设计完毕后的PCB文件生成为GERBER文件,送给PCB制造厂商即可制造出相应的PCB。
1.阻抗控制是控制信号线的阻抗,不是整板PCB的阻抗2.差分阻抗是两条差分信号的阻抗,单线阻抗是单一信号的阻抗。
如USB 2.0要做差分90欧姆,射频信号线一般做单线50欧姆等等。
哪些线要做阻抗控制,控制为多少,一般每个硬件平台都有自己的要求。
3.没有PCB阻抗这种说法,只有信号的阻抗。
电路设计中,差分信号的两条差分线能不能交换顺序?题目说的有些笼统,主要是想知道哪些是可以交换的,为什么,哪些是不可以交换的,又是为什么?还有差分线之间跨加100ohm或12 0ohm的电阻的作用是什么,是阻抗匹配还是将电流转换为电压?各位大牛,ths了会变小。
差分信号实际传输是电压还是电流,什么差分信号,说的通俗一点,差分信号时属于数字信号吗进一步看是以电压为的标准的能量信号,若内阻小,就可以带多个负载(电流大)。
环测威官网:/阻抗控制技术在高速数字电路设计中非常重要,其中必须采用有效的方法来确保高速PCB 的优异性能。
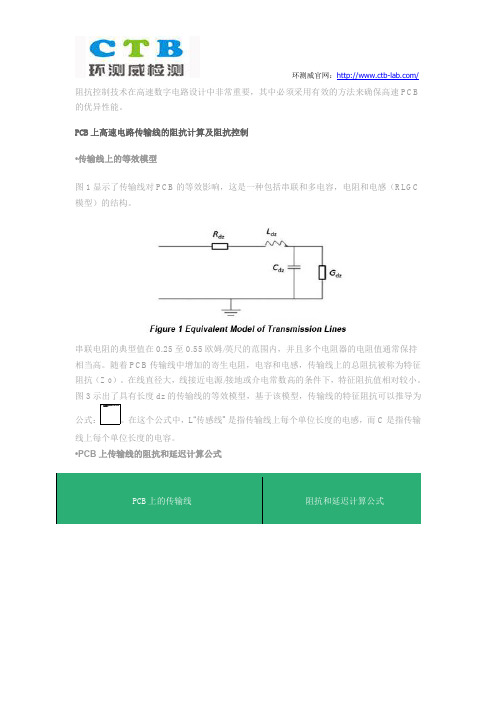
PCB上高速电路传输线的阻抗计算及阻抗控制•传输线上的等效模型图1显示了传输线对PCB的等效影响,这是一种包括串联和多电容,电阻和电感(RLGC 模型)的结构。
串联电阻的典型值在0.25至0.55欧姆/英尺的范围内,并且多个电阻器的电阻值通常保持相当高。
随着PCB传输线中增加的寄生电阻,电容和电感,传输线上的总阻抗被称为特征阻抗(Z 0)。
在线直径大,线接近电源/接地或介电常数高的条件下,特征阻抗值相对较小。
图3示出了具有长度dz的传输线的等效模型,基于该模型,传输线的特征阻抗可以推导为公式:。
在这个公式中,L“传感线”是指传输线上每个单位长度的电感,而C是指传输线上每个单位长度的电容。
环测威官网:/在上面的公式中,Z 0表示阻抗(欧姆),W表示线的宽度(英寸),T表示线的粗细(英寸),H表示到地面的距离(英寸),是指衬底的相对介电常数,t PD是指延迟时间(ps / inch)。
•传输线的阻抗控制布局规则基于上述分析,阻抗和信号的单位延迟与信号频率无关,但与电路板结构,电路板材料的相对介电常数和布线的物理属性有关。
这一结论对于理解高速PCB和高速PCB设计非常重要。
而且,外层信号传输线的传输速度比内层传输速度快得多,因此关键线布局的排列必须考虑这些因素。
阻抗控制是实现信号传输的重要前提。
但是,根据传输线的电路板结构和阻抗计算公式,阻抗仅取决于PCB材料和PCB层结构,同一线路的线宽和布线特性不变。
因此,线路的阻抗在PCB的不同层上不会改变,这在高速电路设计中是不允许的。
本文设计了一种高密度高速PCB,板上大多数信号都有阻抗要求。
例如,CPCI信号线的阻抗应为650欧姆,差分信号为100欧姆,其他信号均为50欧姆。
根据PCB布线空间,必须使用至少十层布线,并确定16层PCB设计方案。
由于电路板的整体厚度不能超过2mm,因此在堆叠方面存在一些困难,需要考虑以下问题:1)。

什么情况下需要做阻抗控制
什幺情况下需要做阻抗控制?
高速传输、高频讯号传输的传输线,在质量上要比传输导线严格得多。
不再是“开路/短路”测试过关,或者缺口、毛刺未超过线宽的20%,就能接收。
必须要求测定特性阻抗值,这个阻抗也要控制在公差以内,否则,只有报废,不得返工。
特性阻抗值控制缘由:
1、缘由一
电子设备(电脑、通信机)操作时,驱动元件(Driver)所发出的信号,将通过PCB传输线到达接收元件(Receiver)。
信号在印制板的信号线中传输时,其特性阻抗值Z0 必须与头尾元件的“电子阻抗”能够匹配,信号中的“能量”才会得到完整的传输。

PCB设计之阻抗控制的走线细节举例1.走线的宽度和间距:走线的宽度和间距会直接影响走线的阻抗。
通常情况下,走线的宽度越宽,阻抗越低。
为了控制阻抗,可以在设计软件中使用特定的规则来指定走线的宽度和间距。
例如,对于常见的50欧姆的阻抗控制要求,可以将规则设置为适当的走线宽度和间距。
2.层数的选择:在高速信号传输中,层数的选择也会影响阻抗。
较高的层数可提供更多的走线空间,有助于降低阻抗。
因此,为了阻抗控制,可以选择适当的层数。
在多层PCB设计中,内层走线的间距和宽度也需要综合考虑,以保持阻抗的一致性。
3.地平面的设计:在PCB设计中,地平面的设计是控制阻抗的关键。
地平面应尽可能地平整,并且与走线保持一定的距离。
这样可以减少地平面与走线之间的互电容和互电感,从而提高阻抗的一致性。
为了实现这一点,可以在地平面上设置一些小孔,用于连接不同地层,从而提高地层的连贯性。
4.走线的形状和拐角:走线的形状和拐角也会影响阻抗。
通常情况下,直线和圆弧形的走线对阻抗控制较好,而直角拐弯较差。
在需要进行90度拐角的情况下,可以使用斜角拐弯来减小阻抗的变化。
此外,走线的形状和转角也会对电磁兼容性(EMC)产生影响,在设计时需要综合考虑。
5.信号层和电源/地层的分离:为了阻抗控制,信号层和电源/地层应尽可能地分离。
这样可以减少信号层与电源/地层之间的互电容和互电感,从而提高阻抗的一致性。
在多层PCB设计中,可以选择在信号层之间插入电源/地层,建立一个电源平面或地平面来提供均匀的分布。
6.终端匹配:终端匹配是一种常用的阻抗控制技术。
通过在信号线的起始和终止位置添加合适的电阻、电容等元件,可以达到匹配信号线的阻抗。
例如,可以在信号线的终止位置添加电阻,以匹配信号线和负载之间的阻抗。
终端匹配可以在设计中通过网络分析软件来实现。
综上所述,PCB设计中的走线细节对于阻抗控制至关重要。
通过选择适当的走线宽度和间距、层数、设计合理的地平面、走线的形状和拐角以及合理的终端匹配,可以实现阻抗的一致性,提高信号传输的质量和稳定性。

金像電子陳佩阻抗控制(Impedance control zo)在P.C板上Lay out及製作上之研討A、阻抗≠電阻(1)導線中所傳導者為直流電(DC)時所受的阻力稱為電阻(Resistance)符號為R,單位為”歐姆”(ohm.Ω)(2)P.C板上的元件間傳輸的是訊號(signal)所遇到之阻力,我們稱之為〃阻抗〃Impedance,學名為Characteristic Impedance特性阻抗符號為ZO,單位也為〃歐姆〃(ohm.Ω)B、P.C板為何要作阻抗控(1)因此PC板上之線路必須能與板上之文件傳輸速率能匹配才能避免訊號受到干擾,一般速率到達100MHZ以上時,PC板即必須作阻抗控制,由於資訊業越來越講求速率,因此可以斷言阻抗控制的板子會越來越多,而且越來越嚴。
C、形成P.C板上阻抗之三大主體(1)大地GND或VCC(2)線路(3)介電材料(膠片prepreg)or(core中壓合好的prepreg)缺一不可D、對PC板而言,對阻抗控制之要因共有四點:1、介電常數:Dielectric constant(ξr)此常數之決定在材料,一般常用之FR4其常數大部份均在4.3±0.32、銅皮厚度:copper foil Thickness(T)一般而言內層板大部份會用1OZ之銅皮其材料之厚度為1.35±0.2mil間,經過 process後其厚度大為1.25±0.2mil,而外層銅皮大部份會用很1/2OZ其材料之厚度為0.7±0.1mil經過process後(一次銅、二次銅後)其厚度大約為2.1±0.5mil3、線路厚度:Conductor width(W)由Lay out決定4、電層厚度:Dielectric Thickness(H)由Lay out時規定或由P.C板公司配合E、將以上四種要因作運算,舉例說明:計算方式以IPC-2141為基準,雖然其準確性不佳,但為目前唯一有公式之版本方便講解用,較精準之計算必須要花錢另買精準之軟體假設四因素值ξr=4.3;T=2.1;W=5;H=4.5.假設四因素值ξr=4.3;T=1.25;W=5;H=5;H1=10例三:Strip Line假設四因素值ξr=4.3;T=1.25;W=5;H=5例四:Dual-strip line假設四因素值ξr=4.3;T=1.25;W=5;H=5;H1(C)=34由以上例子得知我們比較不能控制的(ξr)(T)影響較小,影響較大的我們必須加以控制Lay out方面請控制線寬(W)及Lay up之Design P.C.板製作方面要控制作出來之線寬(W)及介電層厚度(H)以符須求.為了符合Impedance要求,請允許P.C.板公司調整線寬(W)如有必要也請允許調整總板子厚度,但此方式只是治標,治本仍然應由線寬及lay up方面決定,否則空間就比較小甚至無法作業F.由以上說明可知要作好阻抗管控,最主要因素在如何管控好介電層及線寛變成最主要的關鍵。

富山分公司2008年技术研发报告---阻抗控制公差<+/-7%(结案报告)制作人:徐学军2008-9-25审核:核准:富山分公司2008年技术研发结案报告---阻抗控制公差<+/-7%前言:在电子产品的信号传输时,传输线路的阻抗是影响其传输速度及质量的重要因素,PCB 的特性阻抗(characteristic impedance, Z 0)的高精度控制,成为了近一、两年来世界pcb 业一个新的重要课题。
在看作展示世界PCB 及其基板材料一个前沿技术发展的窗口——日本印制电路2000年的展览会(JPCA Show 2000)上,将它与绿色型基板、封装基板其它两项列为该届盛会中的三大“中心话题”。
由此可见:特性阻抗(Z 0)的高精度控制,已成为了PCB 业内待解决的重要课题。
本文针对PCB 板阻抗的控制精度由+/-10%提高至+/-7%的方案进行研究探讨。
专用名词解释:目前我公司设计的阻抗结构主要为:微带线及嵌入状微带线两种.微带线叠构阻抗(surface microstrip ):外层为阻抗控制的信号层面。
它和相连的对照层(Power 或Ground 层)中间用PP 隔开,如下图(1),通常指外层阻抗。
带状线阻抗(offset stripline )﹕内层为阻抗线所在层次,它与顶层(或底层)及相临的参照层以介电层隔开,如下图2,H1=H2时称为对称式带状线阻抗,当H1≠H2时称为非对称式带状线阻抗。
1.国内外技术现况分析从1985开始,就出现PCB 产品的阻抗控制精度+/-15-30%的要求,随着计算机的发展,1997年针对电路800MHz 频率信号Direc Rambus 的DRAM RIMM 模块(随机存储器)提出PCB的微带线等构造设计Z 0精度±10%控制要求,为保证计算机主机和交换机的内部电路实现高速的动作,要求电子产品与基板上的电路阻抗有很好的匹配,产品阻抗已经由+/-10%而需要进一步提高。

基于力矩的阻抗控制公式推导摘要:一、引言二、力矩阻抗控制基本概念1.力矩2.阻抗控制3.力矩阻抗控制三、力矩阻抗控制公式推导1.控制目标2.动力学模型3.控制律设计四、结论正文:一、引言力矩阻抗控制作为一种广泛应用于机器人控制的方法,在提高系统性能和实现精确控制方面具有重要意义。
本文将对基于力矩的阻抗控制公式进行推导,以期加深对该方法的理解。
二、力矩阻抗控制基本概念1.力矩力矩是一种描述力作用效果的物理量,表示为M,它与力和力臂的乘积有关,即M = F * d,其中F为作用力,d为力臂。
力矩具有大小和方向,单位为牛顿米(N·m)。
2.阻抗控制阻抗控制是一种控制策略,通过设定控制目标来调节系统的输入,从而使系统的输出满足期望要求。
阻抗控制的实质是构建系统的输入输出关系,并使其具有某种性能。
3.力矩阻抗控制力矩阻抗控制是一种将力矩和阻抗控制相结合的控制方法,通过调节作用在系统上的力矩来实现系统的稳定性和性能要求。
力矩阻抗控制广泛应用于机器人控制、飞行器控制等领域。
三、力矩阻抗控制公式推导1.控制目标力矩阻抗控制的目标是使系统的输出力矩满足期望值,即M_desired。
为了实现这一目标,需要设计合适的控制律。
2.动力学模型假设系统的动力学模型为M(q) = C(q) * M_desired(q),其中q为系统的状态变量,C(q)为系统的传递函数。
3.控制律设计根据动力学模型,可以设计力矩阻抗控制律为u(t) = K * (M(q) -M_desired(q)),其中K为控制增益,需要根据系统的特性和性能要求进行调节。
四、结论本文对基于力矩的阻抗控制公式进行了推导,首先介绍了力矩、阻抗控制和力矩阻抗控制的基本概念,然后通过动力学模型和控制律设计,得出了力矩阻抗控制的实现方法。

^谈PCB的阻抗控制随着电路设计日趋复杂和高速,如何保证各种信号(特别是高速信号)完整性,也就是保证信号质量,成为难题。
此时,需要借助传输线理论进行分析,控制信号线的特征阻抗匹配成为关键,不严格的阻抗控制,将引发相当大的信号反射和信号失真,导致设计失败。
常见的信号,如PCI总线、PCI-E总线、USB、以太网、DDR内存、LVDS信号等,均需要进行阻抗控制。
阻抗控制最终需要通过PCB设计实现,对PCB板工艺也提出更高要求,经过与PCB 厂的沟通,并结合EDA软件的使用,我对这个问题有了一些粗浅的认识,愿和大家分享。
多层板的结构:为了很好地对PCB进行阻抗控制,首先要了解PCB的结构:通常我们所说的多层板是由芯板和半固化片互相层叠压合而成的,芯板是一种硬质的、有特定厚度的、两面包铜的板材,是构成印制板的基础材料。
而半固化片构成所谓的浸润层,起到粘合芯板的作用,虽然也有一定的初始厚度,但是在压制过程中其厚度会发生一些变化。
通常多层板最外面的两个介质层都是浸润层,在这两层的外面使用单独的铜箔层作为外层铜箔。
外层铜箔和内层铜箔的原始厚度规格,一般有0.5OZ、1OZ、2OZ(1OZ约为35um 或1.4mil)三种,但经过一系列表面处理后,外层铜箔的最终厚度一般会增加将近1OZ左右。
内层铜箔即为芯板两面的包铜,其最终厚度与原始厚度相差很小,但由于蚀刻的原因,一般会减少几个um。
多层板的最外层是阻焊层,就是我们常说的“绿油”,当然它也可以是黄色或者其它颜色。
阻焊层的厚度一般不太容易准确确定,在表面无铜箔的区域比有铜箔的区域要稍厚一些,但因为缺少了铜箔的厚度,所以铜箔还是显得更突出,当我们用手指触摸印制板表面时就能感觉到。
当制作某一特定厚度的印制板时,一方面要求合理地选择各种材料的参数,另一方面,半固化片最终成型厚度也会比初始厚度小一些。
下面是一个典型的6层板叠层结构:0.615.24Mm 3KPCB的参数:不同的印制板厂,PCB的参数会有细微的差异,通过与上海嘉捷通电路板厂技术支持的沟通,得到该厂的一些参数数据:表层铜箔:可以使用的表层铜箔材料厚度有三种:12um、18um和35um。

预估环境刚度阻抗控制概述说明以及解释1. 引言1.1 概述本篇文章旨在探讨预估环境刚度与阻抗控制的相关概念、方法和要点。
预估环境刚度是指对环境的物理特性进行估计或预测,这些特性包括环境的硬度、稳定性以及对外部力量的响应能力。
阻抗控制是一种机器人控制方法,它通过模拟人类肌肉和骨骼系统的阻抗特性来实现与环境的互动。
1.2 文章结构本文分为四个部分:引言、预估环境刚度、阻抗控制和结论。
其中,引言部分将对本文内容进行概述,并介绍文章结构;预估环境刚度部分将解释该概念以及两种常用的方法;阻抗控制部分将对该控制方法进行概述并介绍关键要点;最后,在结论部分将总结主要观点和论点。
1.3 目的本文的目的在于给读者提供有关预估环境刚度和阻抗控制的基础知识和理解,使其能够了解这两个领域目前所取得的进展以及应用。
通过对预估环境刚度和阻抗控制原理的深入解读,期望读者能够对这两个领域的相关研究和应用有更为全面的认知,并为未来的研究提供参考。
2. 预估环境刚度:2.1 环境刚度概念解释:在控制系统中,环境刚度是指被控制对象与环境相互作用时所表现出的刚性程度。
它反映了被控制对象对输入力或外部扰动的响应能力,即其变形或运动程度。
环境刚度可以用于描述各种物理系统,例如机械系统、电子系统和生物系统等。
2.2 预估环境刚度方法一:一种常见的预估环境刚度的方法是使用模型。
通过建立数学模型来描述被控制对象与环境之间的相互关系,可以利用这个模型来预测环境刚度。
这种方法需要对被控制对象及其周围环境进行详细分析,并考虑包括物理特性、几何形状和运动规律等因素。
2.3 预估环境刚度方法二:另一种常用的预估环境刚度的方法是使用实验测试。
在实验室或实际应用中,可以通过施加不同强度和方向的力或扰动到被控制对象上,并测量其响应来推断环境刚度。
例如,在机械系统中可以通过应用不同大小的力来测量其位移和应力的关系,从而确定环境刚度。
通过以上两种方法,我们可以预估环境刚度的大小和特性。

阻抗控制算法-概述说明以及解释1.引言1.1 概述阻抗控制算法是一种广泛应用于机器人控制和交互界面设计中的控制策略。
它通过模拟人体与环境的相互作用过程,实现对机器人的精确控制和逼真的力触感。
阻抗控制算法基于力学和控制理论,结合传感技术和执行器控制,使机器人能够对外界力的变化做出灵活而准确的反应。
该算法的核心思想是模拟人体的肌肉和骨骼系统。
类似于人体的肌肉阻抗,机器人能够根据外部施加的力或位置变化来调整自身的力输出或位置,从而实现对环境的感知和适应。
阻抗控制算法具有灵活性和适应性,能够适应不同的工作环境和任务需求。
阻抗控制算法在许多领域中得到了广泛的应用,包括机器人操作、虚拟现实、医疗康复等。
在机器人操作中,通过阻抗控制算法可以更好地实现对工件的精确操控,提高操作的稳定性和安全性。
在虚拟现实中,阻抗控制算法能够增强用户与虚拟环境之间的互动体验,使用户能够更加真实地感受到虚拟世界的存在。
在医疗康复方面,阻抗控制算法能够帮助康复机器人与患者更好地进行交互,从而实现康复训练的个性化和精确化。
然而,阻抗控制算法也存在一些局限性。
首先,算法的设计和调试需要较高的技术水平和经验,对算法设计人员的要求较高。
其次,算法的实施需要精确的力传感器和执行器,这增加了系统成本和复杂度。
此外,由于每个环境和任务的不同,阻抗控制算法的参数调整和适应性也带来了一定的挑战。
总之,阻抗控制算法作为一种先进的控制策略,在机器人控制和交互界面设计中起着重要的作用。
它能够模拟人体与环境的相互作用过程,实现精确控制和逼真的力触感。
随着技术的不断发展,阻抗控制算法在各个领域的应用前景十分广阔,有望取得进一步的突破和创新。
1.2 文章结构文章结构部分的内容可以描述整篇文章的组织结构,包括各个章节的主要内容和相互之间的关系。
为了使读者更好地理解文章的内容和逻辑,可以按照以下方式来编写文章结构部分的内容:文章结构部分的内容:本文主要分为引言、正文和结论三个部分。



阻抗控制原理解析1. 引言阻抗控制是现代控制理论和技术中的重要概念,它在机械系统、电气系统、生物系统等多个领域中发挥着重要作用。
本文将深入探讨阻抗控制的原理,并试图解析其实现的关键技术和应用前景。
2. 阻抗控制概述阻抗控制是一种基于力和位置之间相互联系的控制方法。
它通过控制系统的输出力和运动位置,以实现对系统运动特性的精确调节。
阻抗控制的目标是使系统在面对外部扰动时能够有效地改变自身的运动状态,以适应环境变化并保持稳定。
3. 阻抗控制的实现原理阻抗控制的实现原理包括两个关键方面:力/位置传感器和控制算法。
3.1 力/位置传感器在阻抗控制中,力/位置传感器起着至关重要的作用,用于实时监测系统的运动状态和外部力的作用。
位置传感器可以测量系统的位置和姿态,而力传感器可以测量作用在系统上的力和力矩。
通过将力和位置作为反馈信号,控制系统可以根据需要优化输出的力和位置。
3.2 控制算法阻抗控制的核心是控制算法,它基于传感器反馈信号和设定的控制目标来计算输出力的大小和方向。
常见的控制算法包括PID控制器、自适应控制器和模型预测控制器等。
这些算法根据系统的动力学特性和控制要求,通过调整控制参数以实现系统的阻抗调节。
4. 阻抗控制的应用案例4.1 机器人控制阻抗控制在机器人控制领域有着广泛的应用。
通过对机器人的末端执行器进行阻抗控制,可以使机器人在与人类或环境交互时更加灵活、安全和可靠。
当机器人抓取物体时,阻抗控制可以使机器人的抓握力适应不同的物体形状和材料特性,从而提高抓取成功率。
4.2 医疗领域阻抗控制在医疗领域中也有着重要的应用。
针对运动障碍患者的康复机器人系统可以通过阻抗控制来模拟理想的运动阻抗,帮助患者恢复运动功能。
阻抗控制还可以用于手术机器人系统,提高手术的准确性和稳定性。
4.3 电力系统在电力系统中,阻抗控制被广泛应用于电力线路的故障检测和抑制。
通过实时监测电力线路的阻抗变化,阻抗控制系统可以及时响应并采取措施,以确保电力系统的安全和稳定运行。


印制电路板(PCB)的阻抗控制介绍一:特性阻抗原理:传输线的定义,在国际标准IPC-2141 3.4.4说明其原则“当 信号在导线中传输时,若该导线长度大到信号波长的1/7,则该导线应被视做传输线。
如当某电磁波信号以时钟频率为900MHZ (GSM手机传输频率)在导线中传播时,则如果线路的长度大于:1/7波长=1C/7F=4.76CM 时,该线路就被定义为传输线。
众所周知,直流电路中电流传输时遇到的阻力叫电阻,交流电路中电流遇到的阻力叫阻抗而高频(》400MHZ )电路中传输信号所遇到的阻力叫特性阻抗,在高频情况下,印制板上的传输信号铜导线可以被视为由一串等效电阻及一并连电感所组合而成的传导线路,而此等效电阻在高频分析时小到可以忽略不记,因此我们在对一个印制板的信号传输进行高频分析时,则只需考虑杂散分布之串联电感及并联电容的效应,我们可以得到以下公式;Z0=R+√L/C √≈√L/C ( Z0为特性阻抗值)关于特性阻抗,有以下几原则:1、 在数字信号在板子上传输时,印制板线路的特性阻抗值必须与头尾元件的电子阻抗匹配,如果不匹配的话,所传送的信号能量将出现反射,散失,衰减,或延误,等现象,从而产生杂信,2、 由于电子元件的电子阻抗越高时,其传输速率才越快,因而电路板的特性阻抗值也要随之提高,才能与之匹配,3、射频通信用的PCB ,除强调 Z0外,有时更加强调板材本身具有低的 Er (介质常数)值及低的Df (介质损耗因子)值。
高频信号在介质中的传输速度为C/ Er,可知:Er 越小,传输速度越快,这也是为何高频要用低介质常数的高频材料。
Df 影响着信号在介质传输过程中的失真,Df 越小,失真越小。
二:特性阻抗的常见形式和计算方法:在线路板的设计中,传输信号最常见的有4种单线布线和2种差分布线方式方式:以上四种单线传输信号布线方式的阻抗计算公式见下;(差分略)1、 微带线:Z 。
=87ln 「5.98H/(0.8W+T )」Er+1.412、 埋入式微带线Z 。

混合阻抗控制-概述说明以及解释1.引言1.1 概述混合阻抗控制是一种在控制系统中广泛应用的方法。
它结合了多种控制技术,包括阻抗控制和混合控制,以实现对系统的精确控制。
混合阻抗控制在机器人、自动化系统和工业领域中得到广泛应用,并且在近年来取得了显著的发展。
混合阻抗控制的主要思想是将系统软硬特性以及环境对机器人的影响进行建模,并引入阻抗控制的概念来达到更好的控制效果。
具体而言,混合阻抗控制通过调整系统的力和位置响应来实现对机器人行为的控制。
通过在控制系统中引入虚拟阻抗元件和虚拟质量元件,可以有效地调节机器人与环境的交互力和位置。
混合阻抗控制的优势在于其灵活性和适应性。
由于混合阻抗控制可以同时调节机器人的刚度、阻尼和质量,所以可以根据不同应用场景的需求进行灵活调整。
此外,混合阻抗控制对于环境变化的适应能力也很强,具有较好的稳定性和鲁棒性。
这使得混合阻抗控制在实际应用中能够有效地解决多种复杂的控制问题。
本文将从混合阻抗控制的概念、原理和应用领域等方面进行详细介绍。
在深入探讨混合阻抗控制的基本原理和方法的基础上,我们将总结混合阻抗控制的优势,并展望其未来的发展前景。
通过这篇文章,读者将全面了解混合阻抗控制,并对其在实际应用中的潜力有一个清晰的认识。
文章结构部分的内容如下:1.2 文章结构本文主要分为以下几个部分进行讨论和阐述。
首先,在引言部分(1.引言)中,我们将对混合阻抗控制进行概述,介绍其基本概念、原理和应用领域,并明确本文的目的。
接着,在正文部分(2.正文)中,我们将详细探讨混合阻抗控制的概念,阐述其在控制系统中的运作原理,以及其在不同应用领域中的具体应用案例。
我们将深入分析混合阻抗控制的工作原理和特点,以及其与传统控制方法的异同之处。
然后,在结论部分(3.结论)中,我们将总结混合阻抗控制的优势,归纳其在实际应用中的意义和价值。
同时,我们将展望混合阻抗控制的未来发展趋势,并给出我们的结论。
通过上述结构,本文将全面介绍混合阻抗控制的相关知识,并对其进行深入分析和探讨,以期能够帮助读者更好地理解和应用混合阻抗控制技术。
