伺服电机样本
- 格式:pdf
- 大小:488.48 KB
- 文档页数:4

伺服电机样本资料1. IntroductionServo motors are electrical motors that drive the motion of a machine with precise accuracy. A servomotor is designed for accurate motion control by using feedback loops to adjust its position in response to an external signal. Servomotors are widely used in a range of industries, from robotics and imaging to factory automation and medical applications.Servomotors are available in a variety of sizes and shapes, from the smallest hobby motors to high-power, large-scale industrial models. The type of servomotor needed for a given application depends on the desired motion, the accuracy and speed required, and the amount of torque needed to move the load.2. Types of Servo MotorsDC Servo Motors: DC servo motors are the most popular typeof servomotor. They are typically used in applications that require high speed and low-to-medium torque. DC servomotors are driven by direct current (DC) motors and are typically used in applications that require position or speed control.AC Servo Motors: AC servo motors are the second most popular type of servomotor. They are typically used in applications that require high torque and low speed. AC servomotors are driven byalternating current (AC) motors and are typically used in applications that require loading and unloading force control.Stepper Motors: Stepper motors are the third most popular type of servomotor. They are typically used in applications that require accurate, high-torque motion. Stepper motors are driven by electric pulses, which cause the motor to rotate in a seriesof steps. This type of motor is typically used in applications that require precise positioning and speed control.3. Advantages and Disadvantages of Servo MotorsServomotors offer several advantages over traditional motors, including precise motion control, high power density, low noise operation, and wide speed range. Additionally, servomotors are typically smaller, lighter, and more efficient than traditional motors, making them ideal for applications that require low weight and high performance.However, servomotors also have some limitations. They can be expensive, and require precision control systems to achieve optimum performance. Additionally, servomotors are typically not suited for applications that require high power or speed.4. Applications of Servo MotorsIn machine tooling applications, servomotors are used todrive the precise motion of cutting tools, such as drills and lathes. In robotics applications, servomotors are used to powerrobotic arms and legs. In imaging systems, servomotors are used to control the position and movement of imaging equipment. In factory automation applications, servomotors are used to rapidly move large loads in precise, repeatable motions. In medical applications, servomotors are used to control the movement of medical devices, such as endoscopes and surgical instruments.5. ConclusionServo motors are a type of electrical motor designed for precise, accurate motion control. There are three primary types of servomotors: DC, AC, and stepper motors. Each type of servomotor offers its own advantages and disadvantages, depending on the application. Servomotors are widely used in machine tooling, robotics, imaging systems, factory automation, and medical applications.。
耐环境型AC伺服驱动伺服电机(耐环境型SGMJV-□D□型伺服单元(耐环境型SGDV-□002000型(普通型SGDV-□000000型1SGMJV 741+253SGMJV- 01 A D D 6S 765431+26*:与本公司以往带油封产品不同,同时适用于通常环境和油污环境。
2*1:–SGDV 100˚C 20˚C *2:40˚C SG JV -01A : 200×200×6mm SG JV -02A -04A -08A : 250×250×6mm–Å::min -1min -1min -1min -1N·m N·m N·m N·m 40003000200010000500060004000300020001000050006000400030002000100050006000400030002000100050006000::V15:DC500V 10M Ω:040˚C:::B :AC1500V 1:IP65:2080%::CCW 保持且各值为TYP.值。
(注 1 反复使用区域的特性会因电源电压而变动。
实线表示三相200V 、单相230V 输入时的特性;虚线表示单相200V 输入时的特性。
2 若有效转矩在额定转矩以内,则可在反复使用区域内使用。
3 对于超过20m 的伺服电机主回路电缆,其电压降会增大,反复使用区域会变窄,敬请注意。
3100% -12 3 DC24V40˚Cs %1000010001001010520510010 53003002J LJ M 530AC SigmaJunmaSize + http ://www.e / A.400A.320····P .339400WWlj -V ㋏㓐ḋ˄KACPS80000042˅NJ(1100W(不带制动器注1.要求油封功能时,请按照下述条件使用。


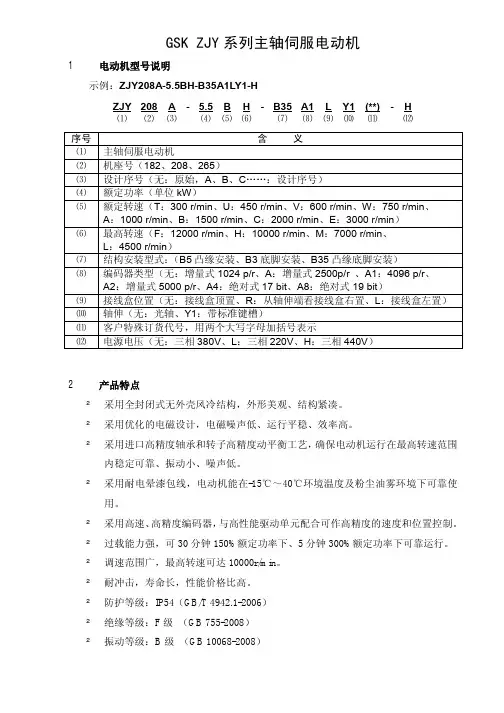
GSK ZJY系列主轴伺服电动机1电动机型号说明示例:ZJY208A-5.5BH-B35A1LY1-HZJY 208 A - 5.5 B H - B35 A1 L Y1 (**) - H⑴⑵⑶⑷⑸⑹⑺⑻⑼⑽⑾⑿序号含义⑴主轴伺服电动机⑵机座号(182、208、265)⑶设计序号(无:原始,A、B、C……:设计序号)⑷额定功率(单位kW)⑸额定转速(T:300 r/min、U:450 r/min、V:600 r/min、W:750 r/min、A:1000 r/min、B:1500 r/min、C:2000 r/min、E:3000 r/min)⑹最高转速(F:12000 r/min、H:10000 r/min、M:7000 r/min、L:4500 r/min)⑺结构安装型式:(B5凸缘安装、B3底脚安装、B35凸缘底脚安装)⑻编码器类型(无:增量式1024 p/r、A:增量式2500p/r 、A1:4096 p/r、A2:增量式5000 p/r、A4:绝对式17 bit、A8:绝对式19 bit)⑼接线盒位置(无:接线盒顶置、R:从轴伸端看接线盒右置、L:接线盒左置)⑽轴伸(无:光轴、Y1:带标准键槽)⑾客户特殊订货代号,用两个大写字母加括号表示⑿电源电压(无:三相380V、L:三相220V、H:三相440V)2产品特点²采用全封闭式无外壳风冷结构,外形美观、结构紧凑。
²采用优化的电磁设计,电磁噪声低、运行平稳、效率高。
²采用进口高精度轴承和转子高精度动平衡工艺,确保电动机运行在最高转速范围内稳定可靠、振动小、噪声低。
²采用耐电晕漆包线,电动机能在-15℃~40℃环境温度及粉尘油雾环境下可靠使用。
²采用高速、高精度编码器,与高性能驱动单元配合可作高精度的速度和位置控制。
²过载能力强,可30分钟150%额定功率下、5分钟300%额定功率下可靠运行。

C a t a l o g C o m m o n S e r v o /S p i n d l e M o t o r s F o r C N C F r o m 2007motion control上海晟锐自动化科技有限公司021-********公特長限主軸馬達 (Asynchronous Spindle motor)特長° 全系列皆具有簡潔的長度尺寸° 整合式端子合設計,體積迷你化 (SH100-SH160)° 高轉速應用到達 9000 轉 (選配可達 12000 轉)° 即使在靜止間也可以全扭力輸出應用範圍° 泛用型工具機應用° 精密複合型的切削中心機以及車床° 特殊專用機° 印刷工業應用於印刷機構驅動° 橡膠,塑膠,抽線線以及玻璃生產製造應用° 馬達繞線機以及線圈製造應用規格範圍° 安裝形式 根據 EN 60034-7 (IEC60034-7)IM B3 (IM V5,IM V6),IM B5(IM V1,IM V3,僅 1PH710 到1PH713 適用) IM B35 (IM V15,IM V36)° 線圈接點:Star° 3.7-100 kW (5-134 HP)° 最高可能轉速 12000 轉° 23.6-750 Nm (17.41-553.2 lb f -ft)° 增量式編碼器弦波 1Vpp / 絕對式編碼器 EnDat / 增量式 HTL 1024 pules (每轉) /2048 pules (每轉) ° 70-79dB° IP55,風扇 IP54° 強制氣冷° 絕緣溫度等級 F ,冷卻空氣供應溫度為 40℃ ( 104℉) 以下 (EN 60034-1/ICE 60034-1)° (選配:無煙型保護噴漆) ° (選配:整合型齒輪箱)特長° 具軸心貫通孔,切削液可穿過心軸到達刀具前端° 體積小,功率強° 最高轉速 12000 轉 (選配可達18000 轉)° 即使在靜止間,可連續全扭力輸出° 經由冷卻作用防止法蘭面產生的熱應力° 低噪音° 防護等級高° 高旋轉精度應用範圍° 可應用於較嚴苛的工作環境如高溫,粉塵,油污或其他不適合做空氣冷卻的情況° 馬達周圍環境不會受到馬達的熱傳導° 可應用在全包覆式的銑削機台° 直傳式主軸° 適用車床的動力主軸° 適用具有水冷卻設計的各式專用機規格範圍° 安裝形式 根據 EN 60034-7 (IEC60034-7)IM B35 (IM V15, IM V36)° 線圈接點:Star/Delta 切換° 3.7-27 kW (5-36.2 HP)° 最高轉速 12000 轉(選配:18000 rpm)° 24-170 Nm (17.7-125.39 lb f -ft)° 內置環形增量式編碼器弦波 1Vpp/ 256 pules/ 轉° 72dB° IP65,心軸出口 IP55° 有水冷型 (常用) 和油冷型° 絕緣溫度等級 F ,冷卻空氣供應溫度為 30℃ ( 86℉) 以下 (EN 60034-1/ICE 60034-1)無煙型保護噴漆:標準1PH7 系列 高性能主軸馬達1PM4 系列 高性能軸心貫通式水冷主軸馬達常用馬達應用特性介紹动化科技有限公司61246816馬達的特性曲線圖介紹1PM6/1PM4 系列某些馬達特別是 1P M 4/1PM6 本身具有高低轉速線圈,其特性曲線特徵如左圖,在馬達的選擇應用上必須先加以考量根據 IEC60034-1,以S1: 連續運轉負荷的最大可能S6: 以 10 分鐘內的間歇性負荷的最大能力為準。
GK6系列交流永磁伺服电机GK6系列交流伺服电动机与相应伺服驱动装置配套后构成的相互协调的系统,可广泛应用于机床、纺织、塑机、印染、印刷、建材、雷达、火炮等领域。
GK6系列交流伺服电动机由定子、转子、高精度反馈元件(如:光电编码器、旋转变压器等)组成。
采用高性能稀土永磁材料形成气隙磁场,采用无机壳定子铁芯,温度梯度大,散热效率高,具有如下优点:●结构紧凑,功率密度高;●转子惯量小,响应速度快;●超高内禀矫顽力稀土永磁材料;抗去磁能力强;●几乎在整个转速范围内可恒转矩输出;●低速转矩脉动小;平衡精度高,高速运行平稳、;●噪音低、振动小;●全密封设计;●性能价格比高。
型号说明GK6 06 1 — 6 A C 3 1 — F B Y1 Z-------特殊说明Y—非标准轴伸及安装尺寸,后面数字为顺序号,b—b型轴伸,带标准键制动器B:带制动器E:无制动器E:2000p/r F:2500p/r R:一对极旋转变压器反馈元件N:2048p/r正余弦编码器安装方式1:IMB5 2:IMV1 3:IMV3 4:IMB3 6:IMB35适配直流母线电压2:210V 3:300V 6:600V额定转速A:1200 r/min B:1500r/min C:2000r/min F:3000r/min ……冷却方式A:自然冷却S:强迫冷却电机极数:4:4极6:6极8:8极电机规格代码中心高(用中心高除以10的整数部分表示)GK6系列交流伺服电动机.技术规范插接件连接位号●四芯电源插座●六芯电源插座伺服电机外形尺寸图轴伸键槽及键推荐标准轴伸C型中心孔推荐标准标准技术数据(与3相220V输入驱动器匹配)标准技术数据(与3相380V输入驱动器匹配)强迫冷却GA16系列全数字交流伺服驱动装置●采用最新运动控制专用数字信号处理器(DSP)、大规模现场可编程逻辑阵列(FPGA)和智能化功率块(IPM)等当今最新技术设计,操作简单、可靠性高、体积小巧,易于安装●控制简单、灵活:通过修改伺服驱动单元参数、可对伺服驱动系统的工作方式、内部参数进行设置、以适以不同应用环境和要求● 状态显示齐全:GA16设置了一系列状态显示信息,方便用户在调试、使用过程中观察伺服驱动单元的相关状态参数;同时也提供了一系列的故障诊断信息 ● 宽调速比(与电机及反馈元件有关):GA 16伺服驱动单元的最高转速可设置为6000转/分,最低转速为0.5转/分;调速比为1:6000● 体积小巧,易于安装:GA 16伺服驱动单元结构紧凑、体积小巧、非常易于安装、拆卸驱动器规格型号说明:GA16 - XX伺服驱动单元安装尺寸驱动器规格技术参数GA270系列全数字交流伺服驱动装置●采用DSP(数字信号处理器)芯片,大大加快了数据的采集与处理速度,使电机运行性能良好●应用大规模门阵列电路,使产品具有很高的可靠性●使用最新的功率器件IPM,使驱动器体积大为减小●操作简便,仅四键就能很方便地进行试运行、监视及参数设置●监视功能允许显示17个参数状态,包括电机回转速度、反馈脉冲、指令脉冲、输入\输出端口电平及电机电流等●具有脉冲位置及模拟速度二种输入控制方式,系统配置更加灵活●位置/速度二种控制模式●外观简洁,结构紧凑型号说明GA270 S -XX X驱动器规格型号电机技术数据及适配驱动器型号。
MOTECMOTEC 故障信息、故障原因及处理措施MOTEC 监视模式代码Err- 21Err- 22Err- 23Err- 24Err- 25Err- 26Err- 27Err- 30Err- 33Err- 36Err- 37Err- 38Err- 39Err- 44Err- 45Err- 46Err- 47说明编码器通信数据错误(此错误只有采用通信方式反馈形式时才生效未检测到编码器编码器信号异常位置偏差过大速度偏差过大超速报警输入脉冲频率过高缺相报警功率模块故障初始化参数错误EEPROM故障CWL正转限位保护CCWL反转限位保护电流检测存在错误如电流传感器损坏电机过热电机电流异常软件过流保护故障原因编码器通信数据受到干扰导致通信校验码不正确1编码器没有与驱动器连接2编码器与驱动器之间接触不良3编码器损坏1编码器信号受到干扰2编码器接收到异常信息1位置模式下指令脉冲频率过高2电机轴卡死,造成电机堵转3脉冲输入端子受到严重干扰4位置偏差报警值太小1电机速度运行异常 2电机被堵转3电机U,V,W接线错误,导致电机无法正常启动1电机速度超过最高限制值2电机运行速度异常1位置控制模式下输入脉冲频率过高2脉冲输入受到干扰1检测到电机缺相不转2电机运转异常模块出现保护动作检测到参数错误内部EEPROM损坏在设置为正转限位报警状态下,电机在正转时驱动器检测到CWL有信号在设置为反转限位报警状态下,电机在反转时驱动器检测到CCWL有信号检测到电流零点异常电机过热保护器动作长时间检测到电机运行在预警电流状态下(常用于监测电机保持制动器异常。
对于不带电机保持制动器的电机也可以用于监测负载运行是否正常1负载惯量突变,如电机从高速状态下急停到02电机连线或电机内部故障3电机对地短路处理措施1检测驱动器与电机连接的FG端子是否接线正确2编码器电缆布线是否合理3编码器电缆长度是否太长1接上编码器2检查编码器与驱动器之间的连线是否可靠3检查编码器电缆与驱动器之间的连接是否可靠、或定位螺丝拧得太松或太紧4若是通信方式编码器,则重点检查编码器电缆布线是否受到强干扰1检查编码器接线是否良好可靠2检查编码器电缆布线是否合理(如与电机电源线或其它大电流电缆捆绑在一起3电机编码器损坏1降低指令脉冲频率2检测电机是否堵转3减小脉冲干扰,采用差分输入4增大PA6A位置偏差报警值1检查电机接线是否正确2检查负载是否正常1检查超速限制值PA66参数值是否太小2检查PA6B参数值是否太小3检测电机U,V,W相序对应驱动器定义是否正确4若在位置模式则检测输入脉冲是否受到干扰5若在速度模式则检查输入速度指令值是否太大1检查输入脉冲频率是否过高2检查输入脉冲是否受到干扰3电子齿轮比值太大1检查电机接线是否可靠2检测电机U,V,W相序对应驱动器定义是否正确3重新连接编码器电缆和电机U,V,W接线若重新上电后仍无法清除该故障,请送厂家维修1重新上电后系统执行自动修复2执行导入缺省参数进行修复3若连续重新上电均出现此报警超过3次则应返回厂家维修若重新上电后仍无法清除该故障,请送厂家维修1检查CWL输入逻辑电平2检查控制回路是否无误1检查CCWL输入逻辑电平2检查控制回路是否无误1确认电流零漂是否太大2按厂家指导执行零点自动校正1电机过热,改善电机冷却散热条件2电机编码器电缆接触不良导致报警1电机保持制动器没有松开2电机保持制动器控制电源异常3电机保持制动器损坏4功率选型太小5负载太重或异常6电流异常检测参数值(PA6E、PA6F参数值设置太小1检查负载控制回路是否故障2检查电机是否故障,如接线和接地是否无误3电机是否对地短路1314MOTEC MOTEC α系列交流伺服MOTEC α系列SED 交流伺服驱动器安装尺寸图 (单位mm说明CanBus通信超时同步偏差角度太大代码Err- 50Err- 51在CanBus同步控制模式下,若在设定时间内没有检测到有效的主/从机则报警在CanBus同步控制模式下,若同步控制角度偏差脉冲超出设定值则报警处理措施1检测通信电缆是否连接可靠2检测CanBus同步模式相关参数是否设置正确,重点检测主从两机如下参数: PAll=8PA91(相同值?PA93是否正确 PA9A是否太小?3通信电缆外围是否存在强干扰1检查最大允许偏差参数值(PA9C是否太小2主从两机负载是否差别太大3主从两机PA55、PA56是否为相同值Err- 65Err- 67Err- 68Err- 69Err- 70Err- 71Err- 72Err- 73Err- 74Err- 75Err- 76Err- 77Err- 78Err- 79Err- 80绝对值编码器过速报警绝对值编码器计数错误绝对值编码器计数溢出绝对值编码器过热绝对值编码器多圈信息错误绝对值编码器电池报警绝对值编码器电池错误配置奇偶校验错误相位误差超过锁相范围速度超过最大跟踪速率跟踪误差过大正余弦信号降级正余弦信号降级正余弦输入信号丢失正余弦信号过大信号干扰大信号干扰大信号干扰大编码器温度过高信号干扰大电池电压低没有连接电池信号干扰大信号干扰大信号干扰大信号干扰大信号干扰大信号干扰大信号干扰大信号干扰大检测编码器电缆,FN- 15可清除绝对值编码器报警检测编码器电缆检测编码器电缆检测编码器电缆更换电池正确连接电池检测编码器电缆检测编码器电缆检测编码器电缆检测编码器电缆检测编码器电缆检测编码器电缆检测编码器电缆检测编码器电缆MOTECα交流伺服系统MOTECα交流伺服系统MOTECα交流伺服系统MOTECα交流伺服系统MOTEC MOTEC α系列交流伺服4电机侧523612345管脚6驱动器侧 J P1E5V E0VPS PS/管脚定义2电机侧345112345管脚6驱动器侧 J P1E5V E0VPS PS/管脚定义3电机侧782451管脚定义管脚定义驱动器侧 J P1四线制增量式编码器接线定义40-80 规格为6PIN 塑料插头,编码器选项7旋转变压器接线定义40-80 规格为15PIN 塑料插头,120、190 规格为10PIN 航空插头,接线管脚定义相同,编码器选项2绝对值式编码器接线定义40-80 规格为9PIN 塑料插头,编码器选项6120、190 规格为7PIN 航空插头,编码器选项7增量式编码器接线定义40-80规格,电机侧为15PIN 塑料插头,编码器选项3增量式编码器接线定义120规格,电机侧为19PINF G E 5V E 0V 电池+电池-PS PS/1810191214SG E 5V E 0VPS PS/电机侧管脚定义管脚定义驱动器侧 J P1120、190 规格为7PIN 航空插头,编码器选项6 F G E 5V E 0V 电池+电池-PS PS/12367451810191214SG E 5V E 0VPS PS/电机侧管脚定义电机侧管脚管脚定义驱动器侧 J P1******* 1811、1315、176、85、71、32、4SG R1R2S1S3S2S4123681115101241491375FG +5V 0V U+U-V+V-W+W-A+A-B+B-Z+Z-电机侧管脚72389101112131617181914154561FG0V U+U-V+V-W+W-A+A-B+B-Z+Z-NC NC NC NCMOTEC α系列交流伺服驱动器电气总接线图MOTEC PPP 模式=PLC+驱动器MOTEC 网络连接NFB NF MC L非熔丝断路器(NFB用来保护电源线,过电流时切断电路噪声滤波器(NF防止外部杂波进入电源线,并减轻伺服电机产生的杂波对外界的干扰磁力接触器(MC接通/断开伺服电机的主电源,磁力接触器应与浪涌吸收联用电抗器(L减少主电源中的谐波单轴运动系统完美解决方案无需专用控制器可完成回原点、单方向定长运动、正反转定长运动、色标捕捉定长运动可选相对值、绝对值坐标内置ModBus通讯协议,可以与主流触摸屏进行连接无需编程,只需设置运动参数可通过人机界面或驱动器操作面板设置运动参数已经成功应用于切袋机、电池裁切机、抓取工件MOTEC MOTEC α系列交流伺服增量式编码器接线定义190规格,电机侧为17PIN 航空插头,编码器选项3电机动力线定义电机侧管脚定义1121367101189452316171415FG +5V 0V U+U-V+V-W+W-A+A-B+B-Z+Z-NC NC电机侧法兰规格40-- 80120190接头管脚接头类型塑料四芯插头圆形航空插头圆形航空插头U 1(红222(蓝3(黄4(黄绿散线V W FG 抱闸抱闸散线3416734167RS485最大256个轴①②③MOTEC R MOTEC α交流伺服系统MOTEC α交流伺服系统MOTEC α交流伺服系统 MOTEC 伺服参数设置软件 MOTEC 电子凸轮轨迹编辑器MOTEC α系列交流伺服 MOTEC 系列交流伺服驱动器特性项目输入电源 SED- XX23 单相220VAC 系列 SED- XX33 单 / 三相 200VAC 系列 SED- XX53 三相 380VAC 系列控制方式使用温度保存温度使用及保存湿度耐振动及耐冲击构造冷却方式最大输入脉冲频率输入信号输出信号编码器反馈信号监视输出保护机能其它面板界面监控界面再生动态制动器速度频率响应特性规格 AC200/220V[- 15~+10%],单相 50/60Hz AC200/220V[- 15%~+10%],单 / 三相 50/60Hz AC380V[- 15%~+10%], 三相 50/60Hz 单相全波整流 IGBTSVPWM 方式 0~+45℃ - 20~+85℃ <85%[ 不结霜条件 ] 0.5G/2.5G 壁挂箱体式自然冷却方式 / 风扇冷却方式 500KPPS 伺服 ON、内部速度选择、模拟指令,方向控制、制动输入伺服报警、伺服准备好、定位完成、报警清除线驱动输出(ABZ) ; 集电极开路输出(ABZ)速度监视、电流监视、位置偏差等 17 项实时数据监视过流、过负荷、过热、过速、过压、欠压、控制电源异常主电源上电后 , 延后约 2 秒,执行伺服驱动器内部初始化 6 位LED 显示, 5 个操作按键 RS232/RS485 接口可选内藏制动电阻(3KW~6KW 功率驱动器再生电阻为外置)具有动态制动功能 400Hz 基本规格控制信号机能使用条件 25 26MOTEC R MOTEC α交流伺服系统 MOTEC 家族其他成员 MOTEC 家族其他成员 ·两相/三相步进系统 ·低压智能伺服系统 ·直流空心杯伺服系统 ·直角坐标机器人 ·五轴以上数控系统 ·精密行星减速器 MOTEC 步进系统 MOTEC 步进系统分为两大类:标准型和智能型。