系统解耦控制
- 格式:doc
- 大小:1.22 MB
- 文档页数:5
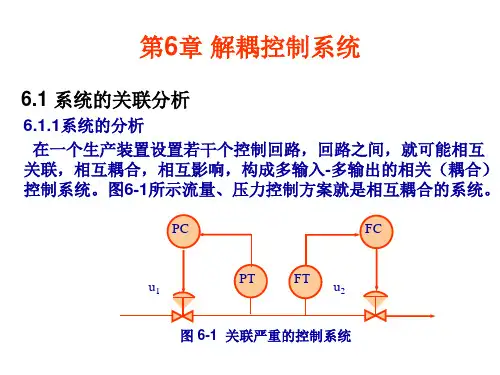
过程控制系统多变量解耦控制系统过程控制系统多变量解耦控制系统(Multivariable Decoupling Control System)是一种能够同时控制多个相关变量的控制系统。
在传统的控制系统中,通常只有一个控制回路,而多变量解耦控制系统则可以通过多个回路同时对多个变量进行控制,从而实现变量之间的解耦。
在实际的工程应用中,往往需要控制多个相关的变量。
这些变量之间可能存在交互作用,控制其中一个变量可能会对其他变量产生影响。
传统的单变量控制系统无法有效地解决这个问题,因为它们无法考虑到变量之间的相互关系。
多变量解耦控制系统通过建立多个独立的控制回路,每个回路分别控制一个相关变量,从而实现变量之间的解耦。
解耦的目标是使每个回路的输出变量不再受到其他变量的影响,即通过调整每个回路的控制器参数,使得系统变得稳定并能够达到预期的控制效果。
多变量解耦控制系统的设计一般包括两个主要步骤:解耦器设计和控制器设计。
解耦器的作用是抑制变量之间的相互干扰,从而实现变量的解耦。
解耦器通常根据系统的数学模型来设计,通过调整解耦器的参数,可以实现变量之间的解耦效果。
在解耦器设计的基础上,需要设计每个回路的控制器。
控制器的设计一般采用传统的控制方法,如PID控制器或者先进的控制算法。
控制器的目标是为每个回路选择合适的控制参数,使得系统的稳定性和控制精度得到保证。
多变量解耦控制系统在实际应用中具有广泛的应用。
例如,在化工过程中,需要控制多个过程变量,如温度、压力和流量等。
传统的单变量控制方法无法满足工艺的需求,而多变量解耦控制系统可以通过解耦变量之间的相互作用,实现高效的过程控制。
总之,多变量解耦控制系统是一种用于控制多个相关变量的控制系统。
它通过建立多个独立的控制回路,实现变量之间的解耦,并通过调整控制器参数,使得系统达到稳定和预期的控制效果。
在工程应用中,多变量解耦控制系统具有广泛的应用前景,可以提高工艺的控制精度和稳定性,从而实现更高效的过程控制。


解耦控制的名词解释解耦控制是计算机科学中一个重要概念,被广泛应用于软件设计及程序开发中。
解耦控制的含义是将单一的程序模块或对象之间的依赖性降至最低限度,从而提高软件的灵活性、可重用性和可维护性。
本文将从以下几个方面对解耦控制的定义、原则及应用进行简要解释。
一、解耦控制的定义解耦控制是一种软件设计方法,旨在降低程序模块或对象之间的相互依赖性,从而提高可维护性、可扩展性和可重用性。
通过解除模块间的强关联关系,使各模块之间的独立性增加,也便于实现模块的替换和改写。
二、解耦控制的原则1.高内聚、低耦合原则高内聚指的是一个模块或对象内部的操作之间高度相关,而与其他模块或对象的关系较少;低耦合是指各个模块或对象之间的依赖关系较少,相对独立。
这两项原则是解耦控制的核心观念,是实现代码可维护性和可扩展性的必备条件。
2.接口分离原则该原则指在设计类或对象的接口时应尽量避免出现过于复杂的接口。
应该根据调用方的需要,将类或对象的接口分成多个小的接口,以便实现多个功能之间的解耦。
3.依赖倒置原则该原则指依赖于抽象,而不是具体的实现。
在软件设计中,应该从抽象层面出发,尽量避免直接依赖于具体的实现。
三、解耦控制的应用在软件设计中,采用解耦控制的方法可以实现更好的模块化设计,促进模块化的开发和重用。
1.模块化设计通过在系统架构上采用模块化的设计思路,可以将系统中的功能模块分解为相对独立的模块。
这样可以使模块之间的耦合度降低,便于模块的调整、维护和替换。
2.代码复用通过将一些独立的功能实现为软件库或者模块,可以提高代码复用率,节省重复的开发时间。
同时,采用解耦控制的方法,也可以使复用的代码与原有的代码相对独立,从而更好地实现复用代码的维护和升级。
总之,解耦控制是一种非常重要的软件设计原则,具有实际的应用意义。
采用解耦控制的方法可以使软件更加健壮、易于维护,同时也有助于提高代码的重用率和程序的可扩展性。
解耦控制实验报告
实验目的:探究解耦控制在自动控制中的应用,并通过实验验证解耦
控制的有效性。
实验原理:
解耦控制是指将系统的输入与输出之间的耦合关系消除,使得系统能
够更加稳定地工作。
所谓输入与输出之间的耦合关系,即指系统在输入信
号作用下,输出信号会受到输入信号的一些干扰或影响。
解耦控制通过分
别对系统的输入和输出进行调节,达到解耦的效果。
在实际应用中,解耦控制可以提高系统的稳定性、可控性和响应速度,减小系统对干扰的敏感性,并且可以避免系统产生不可预测的输出。
实验设备和材料:
1.电脑
2. MatLab软件
3.控制系统实验中常用的电路组件(如电阻、电容等)
实验步骤:
1. 在MatLab中搭建解耦控制系统的数学模型。
2.根据系统模型,设计合适的控制器。
3.将控制器与系统连接起来,进行实验。
4.分别对比解耦控制和未解耦控制的结果并进行分析。
实验结果与分析:
在实验中,我们选择了一个典型的控制系统模型进行解耦控制实验。
实验结果显示,在解耦控制的情况下,系统的输出比未解耦控制的情况下更加稳定,且对干扰信号的响应更加迅速。
这说明解耦控制可以有效地降低系统的耦合性,提高系统的控制性能。
实验总结:
通过本次实验,我们深入了解了解耦控制在自动控制中的应用,并验证了解耦控制的有效性。
在实际应用中,解耦控制可以提高系统的稳定性和可控性,减小系统的不确定性和干扰影响,从而使系统能够更加稳定地工作。
因此,解耦控制在自动控制中具有广泛的应用前景。
解耦控制的基本原理解耦控制是一种通过拆分控制系统成为多个相对独立的子系统,从而实现对系统的分析、设计和调节的控制策略。
其基本原理是将控制系统分解成互不影响的几个子系统,并用相应的子控制器来单独控制每个子系统的行为。
这样做的好处是可以减少系统的复杂性,提高系统的可调节性和可靠性,同时也方便了系统的分析和优化。
1.系统拆分:将整个控制系统分解为若干个子系统,每个子系统对应一个相对独立的动态行为。
通过这种方式,将控制系统的复杂度分解为多个较简单的子系统,从而减少控制的难度。
2.子系统控制:为每个子系统设计相应的控制器,以独立地控制每个子系统的动态行为。
通过精确地控制每个子系统的输入和输出,可以实现对整个控制系统的有效控制。
3.反馈控制:每个子系统的控制器可以通过反馈控制的方式,根据系统输出与期望输出之间的差异来调整输入信号。
这样可以实时地修正系统的误差,使系统更加稳定和可靠。
4.信息交互:通过适当的信息交互,将各个子系统的状态和参数信息传递给其他子系统,以实现协同工作。
这样可以保证整个控制系统的统一性和一致性。
电力系统是一个由多个发电机、负荷和输电线路组成的复杂网络。
为了保证电力系统的稳定运行,需要对电力系统进行控制和调节。
解耦控制在电力系统中的应用主要包括两个方面:解耦发电机和解耦负荷。
解耦发电机是指将电力系统中的每个发电机视为一个独立的子系统,并为每个发电机设计相应的控制器。
这样可以实现对发电机的独立控制,使各个发电机之间的影响减小,从而提高电力系统的稳定性。
解耦负荷是指将电力系统中的每个负荷视为一个独立的子系统,并为每个负荷设计相应的控制器。
这样可以实现对负荷的独立控制,使各个负荷之间的影响减小,从而提高电力系统的可靠性。
在电力系统中,可以通过测量发电机的频率、电压和功率等参数,并基于这些测量结果进行分析和优化。
通过控制发电机的输入信号,可以调整发电机的输出功率,从而实现电力系统的稳定供电。
类似地,通过测量负荷的功率需求和电压电流等参数,并基于这些测量结果进行分析和优化。

实验三 系统解耦控制一、实验目的1、 掌握解耦控制的基本原理和实现方法。
2、 学习利用模拟电路实现解耦控制及实验分析。
二、实验仪器1、 TDN —AC/ACS 型自动控制系统实验箱一台2、 示波器3、 万用表三、实验原理与内容一般多输入多输出系统的矩阵不是对角阵,每一个输入量将影响所有输出量,而每一个输出量同样受到所有输入量的影响,这种系统称为耦合系统。
系统中引入适当的校正环节使传递矩阵对角化,实现某一输出量仅受某一输入量的控制,这种控制方式为解耦控制,其相应的系统称为解耦系统。
解耦系统输入量与输出量的维数必相同,传递矩阵为对角阵且非奇异。
1、 串联控制器()c G s 实现解耦。
图3-1用串联控制器实现解耦耦合系统引入控制器后的闭环传递矩阵为1()[()()()]()()p c p c s I G s G s H s G s G s -Φ=+ (3-1)左乘[()()()]p c I G s G s H s +,整理得1()()()[()()]p c G s G s s I H s s -=Φ-Φ (3-2)式中()s Φ为所希望的对角阵,阵中各元素与性能指标要求有关,在()H s 为对角阵的条件下,1[()()]I H s s --Φ仍为对角阵, 11()()()[()()]c p G s G s s I H s s --=Φ-Φ (3-3)设计串联控制器()c G s 可使系统解耦。
2、 用前馈补偿器实现解耦。
解耦系统如图3-2,图3-2 用前馈控制器实现解耦解耦控制器的作用是对输入进行适当变换实现解耦。
解耦系统的闭环传递函数1()[()]()()p p d s I G s G s G s -Φ=+ (3-4) 式中()s Φ为所希望的闭环对角阵,经变换得前馈控制器传递矩阵1()()[()]()d p p G s G s I G s s -=+Φ (3-5)3、 实验题目双输入双输出单位反馈耦合系统结构图如图。
解耦控制的基本原理解耦控制是一种常用的软件设计原则,旨在减少系统中各个模块之间的依赖关系,提高系统的灵活性和可维护性。
本文将介绍解耦控制的基本原理,并探讨其在软件开发中的应用。
解耦控制的基本原理是将一个复杂的系统拆分成多个相互独立的模块,各模块之间通过接口进行通信。
这样做的好处是,当一个模块发生变化时,只需要修改该模块的代码,而不会影响到其他模块。
这样可以降低系统的耦合度,使系统更易于维护和扩展。
在软件开发中,解耦控制的应用非常广泛。
首先,在模块化的架构设计中,我们可以将系统划分为多个模块,每个模块负责不同的功能。
通过定义清晰的接口和协议,各个模块之间可以独立开发和测试,最后再进行集成。
这种模块化的设计可以提高开发效率,同时也方便后续的维护和升级。
在分布式系统中,解耦控制也非常重要。
分布式系统由多个独立的节点组成,节点之间通过网络进行通信。
为了实现解耦控制,我们可以使用消息队列等中间件来实现节点之间的异步通信。
通过将消息发送到队列中,发送方和接收方之间是解耦的,可以独立进行扩展和修改。
这种解耦控制的设计可以提高系统的可伸缩性和容错性。
在前后端分离的架构中,解耦控制也是非常重要的。
通过将前端和后端拆分成独立的两个模块,前端负责用户界面的展示,后端负责逻辑处理和数据存储。
通过定义良好的接口和协议,前后端之间可以独立开发和测试,最后再进行集成。
这种解耦控制的设计可以提高开发效率,同时也方便前后端的升级和替换。
解耦控制是一种重要的软件设计原则,可以提高系统的灵活性和可维护性。
通过将系统拆分成多个相互独立的模块,并通过接口进行通信,可以降低系统的耦合度,使系统更易于维护和扩展。
在模块化的架构设计、分布式系统和前后端分离的架构中,解耦控制都有着广泛的应用。
因此,掌握解耦控制的原理和方法,对于软件开发人员来说是非常重要的。
实验二、 系统解耦控制
一、实验目的
1、 掌握解耦控制的基本原理和实现方法。
2、 学习利用模拟电路实现解耦控制及实验分析。
二、实验仪器
1、 TDN —AC/ACS 型自动控制系统实验箱一台
2、 示波器
3、 万用表
三、实验原理与内容
一般多输入多输出系统的矩阵不是对角阵,每一个输入量将影响所有输出量,而每一个输出量同样受到所有输入量的影响,这种系统称为耦合系统。
系统中引入适当的校正环节使传递矩阵对角化,实现某一输出量仅受某一输入量的控制,这种控制方式为解耦控制,其相应的系统称为解耦系统。
解耦系统输入量与输出量的维数必相同,传递矩阵为对角阵且非奇异。
1、 串联控制器()c G s 实现解耦。
图2-1用串联控制器实现解耦
耦合系统引入控制器后的闭环传递矩阵为
1
()[()()()]()()p c p c s I G s G s H s G s G s -Φ=+
左乘[()()()]p c I G s G s H s +,整理得
1()()()[()()]p c G s G s s I H s s -=Φ-Φ
式中()s Φ为所希望的对角阵,阵中各元素与性能指标要求有关,
在()H s 为对角阵的条件下,1
[()()]I H s s --Φ仍为对角阵, 1
1
()()()[()()]c p G s G s s I H s s --=Φ-Φ
设计串联控制器()c G s 可使系统解耦。
2、 用前馈补偿器实现解耦。
解耦系统如图2-2,
图2-2 用前馈控制器实现解耦
解耦控制器的作用是对输入进行适当变换实现解耦。
解耦系统的闭环传递函数
1()[()]()()p p d s I G s G s G s -Φ=+
式中()s Φ为所希望的闭环对角阵,经变换得前馈控制器传递矩阵
1()()[()]()d p p G s G s I G s s -=+Φ
3、 实验题目
双输入双输出单位反馈耦合系统结构图如图。
图2-3 系统结构图
设计解耦控制器对原系统进行解耦,使系统的闭环传递矩阵为
10
(1)
()10(51)s s s ⎡⎤⎢⎥+⎢
⎥Φ=⎢
⎥⎢⎥+⎣
⎦
通过原系统输出量(1,2y y )与偏差量(1,2e e )之间的关系
11221
0()()21
()()11
1Y s E s s Y s E s s ⎡⎤
⎢⎥
⎡⎤⎡⎤
+=⎢⎥⎢⎥
⎢⎥⎣⎦⎣⎦
⎢⎥⎢⎥+⎣
⎦
得到原系统开环传递矩阵 ()p G s
1
021
()111p s G s s ⎡⎤
⎢⎥+=⎢
⎥⎢⎥⎢⎥+⎣⎦
由输出量(1,2y y )输入量(1,2u u )个分量之间的关系为
11221
0()()2(1)
()()21
12(2)2Y s U s s Y s U s s s s ⎡⎤⎢⎥
+⎡⎤⎡⎤⎢⎥=⎢⎥
⎢⎥+⎢⎥⎣⎦⎣⎦⎢⎥++⎣
⎦ 原系统闭环传递矩阵
'
1
02(1)()2112(2)2s s s s s ⎡⎤⎢⎥+⎢
⎥Φ=+⎢⎥⎢⎥++⎣
⎦
1)设计的串联控制器为:由于()H s I = 1
1
()()()[()]c p G s G s s I s --=Φ-Φ
1
1
1
1000(1)(1)211151001(51)(51)s s s s s s s s --⎡⎤⎡⎤
⎡⎤
⎢⎥⎢
⎥
⎢⎥+++⎢⎥⎢⎥=⎢⎥⎢⎥⎢
⎥⎢⎥⎢⎥⎢⎥⎢⎥+++⎣⎦
⎣⎦⎣⎦
210(21)(1)15s s s s s s s +⎡⎤
⎢⎥=⎢
⎥+++⎢⎥-⎢⎥⎣⎦
反馈控制器实现系统解耦的结构图
图2-4用串联控制器实现解耦的系统结构图
2)设计的前馈控制器为:
'
1
1
()()[()]()()()d p p G s G s I G s s S s --=+Φ=ΦΦ 带入参数得:2
02(21)51s s s ⎡⎤⎢⎥+⎢⎥
-+⎢⎥+⎣⎦
前馈控制器实现系统解耦的结构图
图2-5用前馈控制器实现解耦的系统结构图
四、实验步骤
1、 根据实验题目采用串联控制器或前馈控制器,在实验板上设计解
耦系统的模拟实验线路并搭接实验电路。
2、1U 单元11S 置阶跃档,12S 置下档,调节11W 和12W 使端输出幅值
为1周期为5s 的方波信号。
3、时1()01()(),(),()01()1()t t U t U t U t t t ⎡⎤⎡⎤⎡⎤
===⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦
分别作用于系统时,
用示波器观察两路的输出,并记录波形。
五、实验报告
1、 画出闭环解耦系统方框图及实验模拟电路图。
2、 用示波器观测并记录解耦前后系统的输出波形。
3、 利用MATLAB 的SIMULINK 建原系统模型及解耦控制系统模型,
按实验步骤3进行仿真,得出实验结果。
4、 将仿真结果与实验结果做比较分析。
5、 叙述解耦控制的意义。
六、实验预习
1、 阅读实验原理与内容,并对相关公式进行推导。
2、 利用MATLAB 的SIMULINK 建原系统模型及解耦控制系统模型,
按实验步骤3进行仿真,体会解耦控制的意义。