3一维优化方法
- 格式:ppt
- 大小:894.50 KB
- 文档页数:34
最优化方法归纳总结最优化方法归纳总结篇一:最优化方法综述最优化方法综述1.引论1.1应用介绍最优化理论与算法是一个重要的数学分支,它所研究的问题是讨论在众多的方案中什么样的方案最优以及怎样找出最优方案。
这类问题普遍存在。
例如,工程设计中怎样选择设计参数,使得设计方案满足设计要求,又能降低成本;资源分配中,怎样分配有限资源,使得分配方案既能满足各方面的基本要求,又能获得好的经济效益;生产评价安排中,选择怎样的计划方案才能提高产值和利润;原料配比问题中,怎样确定各种成分的比例,才能提高质量,降低成本;城建规划中,怎样安排工厂、机关、学校、商店、医院、住户和其他单位的合理布局,才能方便群众,有利于城市各行各业的发展;农田规划中,怎样安排各种农作物的合理布局,才能保持高产稳产,发挥地区优势;军事指挥中,怎样确定最佳作战方案,才能有效地消灭敌人,保存自己,有利于战争的全局;在人类活动的各个领域中,诸如此类,不胜枚举。
最优化这一数学分支,正是为这些问题的解决,提供理论基础和求解方法,它是一门应用广泛、实用性强的学科。
1.2优化的问题的基本概念工程设计问题一般都可以用数学模型来描述,即转化为数学模型。
优化设计的数学模型通常包括设计变量、目标函数和约束条件。
三个基本要素。
设计变量的个数决定了设计空间的维数。
确定设计变量的原则是:在满足设计基本要求的前提下,将那些对设计目标影响交大的而参数选为设计变量,而将那些对设计目标影响不大的参数作为设计变量,并根据具体情况,赋以定值,以减少设计变量的个数。
用来评价和追求最优化设计方案的函数就称为目标函数,目标函数的一般表达式为f?x??f?x1,x2,?xn?。
优化设计的目的,就是要求所选择的设计变量使目标函数达到最佳值。
所谓最佳值就是极大值或极小值。
在设计空间中,虽然有无数个设计点,即可能的设计方案,但是一般工程实际问题对设计变量的取值总是有一些限制的,这些限制条件显然是设计变量的函数,一般称之为优化设计问题的约束条件或约束函数。
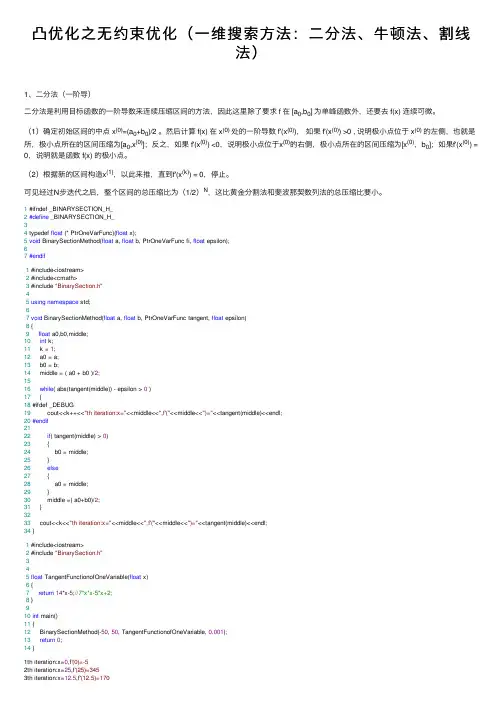
凸优化之⽆约束优化(⼀维搜索⽅法:⼆分法、⽜顿法、割线法)1、⼆分法(⼀阶导)⼆分法是利⽤⽬标函数的⼀阶导数来连续压缩区间的⽅法,因此这⾥除了要求 f 在 [a0,b0] 为单峰函数外,还要去 f(x) 连续可微。
(1)确定初始区间的中点 x(0)=(a0+b0)/2 。
然后计算 f(x) 在 x(0) 处的⼀阶导数 f'(x(0)),如果 f'(x(0)) >0 , 说明极⼩点位于 x(0)的左侧,也就是所,极⼩点所在的区间压缩为[a0,x(0)];反之,如果 f'(x(0)) <0,说明极⼩点位于x(0)的右侧,极⼩点所在的区间压缩为[x(0),b0];如果f'(x(0)) = 0,说明就是函数 f(x) 的极⼩点。
(2)根据新的区间构造x(1),以此来推,直到f'(x(k)) = 0,停⽌。
可见经过N步迭代之后,整个区间的总压缩⽐为(1/2)N,这⽐黄⾦分割法和斐波那契数列法的总压缩⽐要⼩。
1 #ifndef _BINARYSECTION_H_2#define _BINARYSECTION_H_34 typedef float (* PtrOneVarFunc)(float x);5void BinarySectionMethod(float a, float b, PtrOneVarFunc fi, float epsilon);67#endif1 #include<iostream>2 #include<cmath>3 #include "BinarySection.h"45using namespace std;67void BinarySectionMethod(float a, float b, PtrOneVarFunc tangent, float epsilon)8 {9float a0,b0,middle;10int k;11 k = 1;12 a0 = a;13 b0 = b;14 middle = ( a0 + b0 )/2;1516while( abs(tangent(middle)) - epsilon > 0 )17 {18 #ifdef _DEBUG19 cout<<k++<<"th iteration:x="<<middle<<",f'("<<middle<<")="<<tangent(middle)<<endl;20#endif2122if( tangent(middle) > 0)23 {24 b0 = middle;25 }26else27 {28 a0 = middle;29 }30 middle =( a0+b0)/2;31 }3233 cout<<k<<"th iteration:x="<<middle<<",f'("<<middle<<")="<<tangent(middle)<<endl;34 }1 #include<iostream>2 #include "BinarySection.h"345float TangentFunctionofOneVariable(float x)6 {7return14*x-5;//7*x*x-5*x+2;8 }910int main()11 {12 BinarySectionMethod(-50, 50, TangentFunctionofOneVariable, 0.001);13return0;14 }1th iteration:x=0,f'(0)=-52th iteration:x=25,f'(25)=3453th iteration:x=12.5,f'(12.5)=1704th iteration:x=6.25,f'(6.25)=82.55th iteration:x=3.125,f'(3.125)=38.756th iteration:x=1.5625,f'(1.5625)=16.8757th iteration:x=0.78125,f'(0.78125)=5.93758th iteration:x=0.390625,f'(0.390625)=0.468759th iteration:x=0.195312,f'(0.195312)=-2.2656210th iteration:x=0.292969,f'(0.292969)=-0.89843811th iteration:x=0.341797,f'(0.341797)=-0.21484412th iteration:x=0.366211,f'(0.366211)=0.12695313th iteration:x=0.354004,f'(0.354004)=-0.043945314th iteration:x=0.360107,f'(0.360107)=0.041503915th iteration:x=0.357056,f'(0.357056)=-0.001220716th iteration:x=0.358582,f'(0.358582)=0.020141617th iteration:x=0.357819,f'(0.357819)=0.0094604518th iteration:x=0.357437,f'(0.357437)=0.0041198719th iteration:x=0.357246,f'(0.357246)=0.0014495820th iteration:x=0.357151,f'(0.357151)=0.0001144412、⽜顿法(⼆阶导)前提:f 在 [a0,b0] 为单峰函数,且[a0,b0] 在极⼩点附近,不能离的太远否则可能⽆法收敛。

无约束优化:不对定义域或值域做任何限制的情况下,求解目标函数的最小值。
这是因为实际应用中,许多情形被抽象为函数形式后均为凸函数,对于凸函数来说局部最小值点即为全局最小值点,因此只要能求得这类函数的一个最小值点,该点一定为全局最小值。
(直接法:又称数值方法,它只需计算目标函数驻点的函数数值,而不是求其倒数,如坐标轮换法,单纯型法等。
间接法:又称解析法,是应用数学极值理论的解析方法。
首先计算出目标函数的一阶或一阶、二阶导数,然后根据梯度及海赛矩阵提供的信息,构造何种算法,从而间接地求出目标函数的最优解,如牛顿法、最速下降法共轭梯度法及变尺度法。
)在优化算法中保证整体收敛的重要方法就是线搜索法与信赖域法,这两种算法既相似又有所不同。
根据不同的线搜索准则就延伸出不同的线搜索算法,譬如比较常见和经典的最速下降法,牛顿法,拟牛顿法以及共辄梯度法等。
一维搜索又称线性搜索(Line Search),就是指单变量函数的最优化,它是多变量函数最优化的基础,是求解无约束非线性规划问题的基本方法之一。
一维搜索技术既可独立的用于求解单变量最优化问题,同时又是求解多变量最优化问题常用的手段,虽然求解单变量最优化问题相对比较简单,但其中也贯穿了求解最优化问题的基本思想。
由于一维搜索的使用频率较高,因此努力提高求解单变量问题算法的计算效率具有重要的实际意义。
在多变量函数的最优化中,迭代格式X k+1=X k+a k d k其关键就是构造搜索方向d k和步长因子a k设Φ(a)=f(x k+ad k)这样从凡出发,沿搜索方向d k,确定步长因子a k,使Φ(a)<Φ(0)的问题就是关于步长因子a的一维搜索问题。
其主要结构可作如下概括:首先确定包含问题最优解的搜索区间,然后采用某种分割技术或插值方法缩小这个区间,进行搜索求解。
一维搜索通常分为精确的和不精确的两类。
如果求得a k使目标函数沿方向d k达到极小,即使得f (x k+a k d k)=min f (x k+ ad k) ( a>0)则称这样的一维搜索为最优一维搜索,或精确一维搜索,a k叫最优步长因子;如果选取a k使目标函数f得到可接受的下降量,即使得下降量f (x k)一f (x k+a k d k)>0是用户可接受的,则称这样的一维搜索为近似一维搜索,或不精确一维搜索,或可接受一维搜索。
第3章一维优化方法一维优化方法是数学中用于求解最优化问题的一种重要技术。
在实际问题中,往往需要找到一个函数的最小值或最大值点,一维优化方法就是这样一种方法,可以找到函数在一些区间内的最小值或最大值点。
一维优化方法有很多种,常见的有穷举法、黄金分割法、斐波那契法、抛物线法、割线法、牛顿法等。
不同的方法有不同的适用范围和求解效率,我们可以根据具体问题的特点选择合适的方法进行求解。
穷举法是一种最简单的一维优化方法,它通过遍历函数在给定区间内的所有可能取值,找到其中的最小值或最大值。
穷举法的缺点是计算量大,当问题规模较大时,不适用。
但是它的优点是简单易懂,适用于初学者入门。
黄金分割法是一种较为常用的一维优化方法,它通过划分给定区间,选择区间内一些点进行迭代,不断缩小区间范围,直到找到最优解。
黄金分割法的优点是收敛速度较快,适用于一些比较复杂的问题。
斐波那契法是一种基于斐波那契数列的一维优化方法,它可以在一定程度上提高黄金分割法的效率。
斐波那契法的关键在于选择合适的斐波那契数列作为迭代次数,通过比较函数在斐波那契数列中两个相邻点的取值,确定新的区间范围。
抛物线法是一种通过拟合函数的抛物线来求解最优解的一维优化方法。
它通过选择合适的三个点,构造一个简单的二次函数,找到该函数的极小值点作为最优解。
抛物线法的优点是计算量相对较小,但是在一些复杂的问题中可能不适用。
割线法是一种通过逐步逼近函数极值点的一维优化方法。
它通过选择给定区间上两个初始点,不断用割线近似替代切线,找到极小值点。
割线法的优点是收敛速度快,但是需要在迭代过程中进行导数计算,对于一些无法求导的函数不适用。
牛顿法是一种通过利用函数在一些点处的一阶导数来逼近极值点的一维优化方法。
它通过选择给定区间上一个初始点,利用导数的概念找到极小值点。
牛顿法的优点是收敛速度非常快,但是对于一些无法求导的函数不适用。
综上所述,一维优化方法是数学中用于求解最优化问题的一种重要技术。
一维搜索方法:(方法比较)“成功—失败”法、二分法、0.618法(黄金分割法)、牛顿法、二次插值法、D.S.C法、Powell法、D.S.C—Powell组合法。
1、“成功—失败”法:主要思想:从一点出发,按一定的步长搜索新点,若成功,加大步长继续搜索,否则,缩短步长小步后退。
此方法可以求最优解所在区间,称为“搜索区间”。
2、二分法:主要思想:区间[a,b]的中间值x0,判断f(x)的导数在三个点处的值,舍去一部分区间再求f(x)的极小值。
3、0.618法:等比例收缩原则,每次留下来的区间长度是上次留下来的区间长度的w倍。
以及对称原则、去坏留好原则。
W=0.6184、牛顿法:基本思想:在极小值点附近用目标函数的二阶泰勒多项式近似代替目标函数,从而求得目标函数的极小值点的近似值。
5、二次插值法:牛顿法是在x k附近的目标函数用泰勒多项式近似代替,而此法是将f(x)用二次插值多项式p(x)近似代替。
把p(x)的极小值点作为f(x)极小值点的代替,从来求得函数的极小值。
6、D.S.C法:主要思想:利用成功—失败法寻找靠近极小值点的三点,进行二次插值。
优点是:收敛速度快,且不要求函数可微。
7、Powell法:基本思想:在搜索方向开始得到三点x0,x1,x2后,作二次插值,求得最小值x,在四点中去坏留好,在余下的三点中再作二次插值……8、D.S.C—Powell组合法:几种方法比较:D.S.C—Powell组合法是非常好的一种方法,它比任何一个单个方法都好D.S.C—Powell组合法与0.618法比较:D.S.C—Powell法中函数值的计算要比黄金分割法少得多,一般来讲它优于黄金分割法。
但:D.S.C—Powell法不一定能收敛到最优解。
最速下降法与修正牛顿法:对于正定二次函数,牛顿法一步可以求得最优解,对于非二次函数,牛顿法并不能保证有限次求得其最优解,但由于目标函数在极小值的附近近似于二次函数,故当初始点靠近极小值时,牛顿法收敛的速度比较快。