建筑力学静定结构位移计算
- 格式:pptx
- 大小:3.39 MB
- 文档页数:19


第十七章位移法求解超静定结构的两种最基本的方法力法适用性广泛,解题灵活性较大。
(可选用各种各样的基本结构)。
位移法在解题上比较规范,具有通用性,因而计算机易于实现。
位移法可分为:手算——位移法电算——矩阵位移法力法位移法力法与位移法最基本的区别:基本未知量不同力法:以多余未知力基本未知量位移法:以某些结点位移基本未知量F PϕBϕB在忽略杆轴向变形和剪切变形的条件下,结点B 只发生角位移ϕB 。
由于结点B 是一刚结点,故汇交于结点B 的两杆的杆端在变形后将发生与结点相同的角位移。
位移法计算时就是以这样的结点角位移作为基本未知量的。
第一节位移法的基本概念BAClhEI 1EI 2首先,附加一个约束使结点B 不能转动,此时结构变为两个单跨超静定梁。
称为位移法的基本结构。
在荷载作用下,可用力法求得两根杆的弯矩图。
由于附加约束阻止结点B 的转动,故在附加约束上会产生一个约束力矩1631l F F P P -=C BAF P316Fl 532FlCAB然后,为了使变形符合原来的实际情况,必须转动附加约束以恢复ϕB 。
两个单跨超静梁在B 端有角位移时的弯矩图,同样可由力法求得。
此时在附加约束上产生约束力矩Bh EI lEI F ϕ⎪⎭⎫ ⎝⎛+=211143ϕB ϕBBA CB lEI ϕ13B h EI ϕ24B hEI ϕ22F PBAC求基本未知量,可分两步完成:1)在可动结点上附加约束,限制其位移,在荷载作用下,附加约束上产生附加约束力;2)转动附加约束使结点产生角位移ϕB ,使结构发生与原结构一致的结点位移。
ϕBϕB附加刚臂经过上述两个步骤,附加约束上产生约束力矩应为F 11和F 1P 之和。
由于结构无论是变形,还是受力都应与原结构保持一致,而原结构在B 处无附加约束,亦无约束力矩,故有F 11+F 1P =001634321=-⎪⎭⎫⎝⎛+Fl h EI lEI B ϕ解方程可得出ϕB 。
位移法典型方程将求出后ϕB ,代回图22-1c ,将所得的结果再与图22-1b 叠加,即得原结构(图22-1a )的解。

第9章位移法用计算机进行结构分析时通常以位移法原理为基础。
位移法是求解超静定结构的另一基本方法。
9.1 等截面单跨超静定梁的杆端内力位移法中用加约束的办法将结构中的各杆件均变成单跨超静定梁。
在不计轴向变形的情况下,单跨超静定梁有图9-1中所示的二种形式。
它们分别为:两端固定梁;一端固定另端链杆(铰)支座梁。
9.1.1 杆端力与杆端位移的正、负号规定1.杆端力的正、负号规定杆端弯矩:顺时针转向为正,逆时针转向为负。
对结点而言,则逆时针转向为正,顺时针转向为负。
杆端剪力:使所研究的分离体有顺时针转动趋势为正,有逆时针转动趋势为负。
2.杆端位移的正、负号规定杆端转角:顺时针方向转动为正,逆时针方向转动为负。
杆端相对线位移:两杆端连线发生顺时针方向转动时,相对线位移Δ为正,反之为负。
9.1.2 荷载作用下等截面单跨超静定梁的杆端力———载常数荷载所引起的杆端弯矩和杆端剪力分别称为固端弯矩和固端剪力,统称为载常数。
9.1.3杆端单位位移所引起的等截面单跨超静定梁的杆端力—刚度系数(形常数)杆端单位位移所引起的杆端力称为刚度系数或称形常数。
§9.2 位移法的基本概念1.基本未知量当不计轴向变形时,刚结点1不发生线位移,只发生角位移Z1,且A1和杆B1的1端发生相同的转角Z1。
刚结点1的角位移Z1就是求解该刚架的位移法基本未知量。
图9 -72.基本结构 在刚结点1上加一限制转动(不限制线位移)的约束,称之为附加刚臂,如图9-7(b)所示。
因不计轴向变形,杆A1变成一端固定一端铰支梁,杆B1变成两端固定梁。
原刚架则变成单跨超静定梁系,称为位移法基本结构。
3.荷载在附加刚臂中产生的反力矩R 1F在基本结构图9-7(b)上施加原结构的荷载,得到的结构,称为位移法基本体系,杆B1发生虚线所示的变形,但杆端1截面被刚臂制约,不产生角位移,使得刚臂中出现了反力矩R 1F 。
4.刚臂转动引起的刚臂反力矩R 11为使基本结构与原结构一致,需将刚臂(连同刚结点1)转动一角度Z 1,使得基本结构的结点1 转角与原结构虚线所示自然变形状态刚结点转角相同。

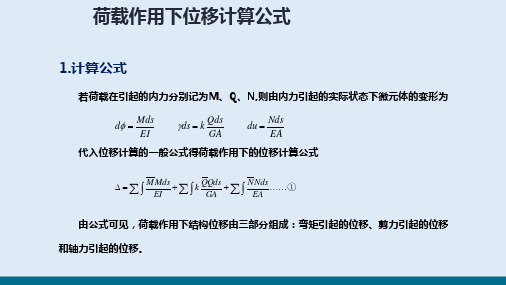
建筑力学第五章_静定结构位移计算静定结构位移计算是建筑力学中的重要内容,通过位移计算可以得到结构在荷载作用下的变形情况,从而评估结构的稳定性和安全性。
本文将介绍静定结构位移计算的基本原理和具体步骤。
首先,我们需要明确什么是静定结构。
静定结构指的是结构所有部件之间的变形由完全互相嵌入融合而不产生相对变动,这样的结构称为静定结构。
而非静定结构则是指结构所有部件之间的变形不会由于完全互相嵌入而互相制约的结构。
静定结构位移计算的基本原理是根据平衡条件和变形约束条件进行计算。
具体步骤如下:1.建立结构模型:根据实际情况,建立结构的几何形状和支撑条件的数学模型。
可以采用杆件模型、面单元模型等方法进行简化。
2.确定荷载:根据设计要求和实际情况确定结构所受的荷载,包括重力荷载、风荷载、地震荷载等。
3.建立方程:根据平衡条件,建立结构的受力平衡方程。
在平衡方程中,包括结构的受力平衡方程和变形约束条件等。
4.求解方程:根据建立的方程进行求解。
可以通过解析方法、数值方法或者计算机模拟等方式进行求解。
5.分析结果:得到结构在荷载作用下的位移情况。
根据计算结果进行分析,评估结构的稳定性和安全性。
如果结果超出了允许的范围,则需要对结构进行调整或优化重新计算。
静定结构位移计算过程中需要注意的是,要考虑结构的边界条件和材料的性质等因素。
边界条件包括支座的约束条件和结构的支承情况等,材料的性质包括刚度、强度等。
静定结构位移计算是建筑力学中的重要内容,对于结构的安全性和稳定性评估非常关键。
通过位移计算,可以得到结构的变形情况,为结构设计和优化提供重要的参考依据。
但需要注意的是,位移计算只能适用于静定结构,对于非静定结构需要采用其他方法进行分析和计算。
总之,静定结构位移计算是建筑力学中的重要内容,通过建立结构模型、确定荷载、建立方程、求解方程和分析结果等步骤,可以得到结构在荷载作用下的位移情况。
这对于评估结构的稳定性和安全性非常有帮助。