机械原理第二章
- 格式:ppt
- 大小:5.03 MB
- 文档页数:28
第2章机构的结构分析1.判断题(1)机构能够运动的基本条件是其自由度必须大于零。
(错误 )(2)在平面机构中,一个高副引入两个约束。
(错误 )(3)移动副和转动副所引入的约束数目相等。
(正确 )(4)一切自由度不为一的机构都不可能有确定的运动。
(错误 )(5)一个作平面运动的自由构件有六个自由度。
(错误 )2.选择题(1) 两构件构成运动副的主要特征是( D )。
A .两构件以点线面相接触B .两构件能作相对运动C .两构件相连接D .两构件既连接又能作一定的相对运动(2) 机构的运动简图与( D )无关。
A .构件数目B .运动副的类型C .运动副的相对位置D .构件和运动副的结构(3) 有一构件的实际长度0.5m L =,画在机构运动简图中的长度为20mm ,则画此机构运动简图时所取的长度比例尺l μ是( D )。
A .25B .25mm/mC .1:25D .0.025m/mm(4) 用一个平面低副连接两个做平面运动的构件所形成的运动链共有(B )个自由度。
A .3B .4C .5D .6(5) 在机构中,某些不影响机构运动传递的重复部分所带入的约束为(A )。
A .虚约束B .局部自由度C .复合铰链D .真约束(6) 机构具有确定运动的条件是( D )。
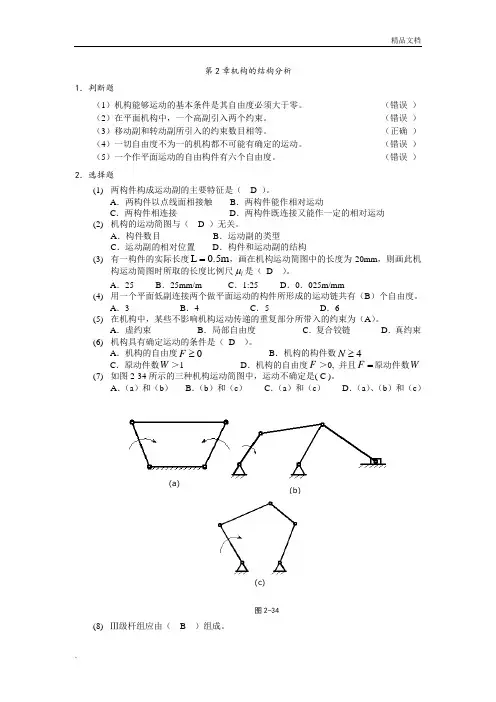
A .机构的自由度0≥FB .机构的构件数4≥NC .原动件数W >1D .机构的自由度F >0, 并且=F 原动件数W(7) 如图2-34所示的三种机构运动简图中,运动不确定是( C )。
A .(a )和(b )B .(b )和(c )C .(a )和(c )D .(a )、(b )和(c )(8) Ⅲ级杆组应由( B )组成。
(a) (c)(b)图2-34A.三个构件和六个低副 B.四个构件和六个低副C.二个构件和三个低副D.机架和原动件(9)有两个平面机构的自由度都等于1,现用一个有两铰链的运动构件将它们串成一个平面机构,这时自由度等于( B )。
机械原理第二章下面是机械原理第二章的内容,但是不包含标题和重复的文字:1. 引言机械原理是研究机械系统运动和相互作用的科学。
本章将介绍机械原理的基本概念和原理。
2. 平面运动问题2.1 定义和分类机械系统的平面运动可以分为直线运动和曲线运动两类。
本节介绍了这两种运动的定义和分类。
2.2 直线运动直线运动是指物体沿着直线路径移动的运动。
本节讲解了直线运动的基本特点和相关的运动学原理。
2.3 曲线运动曲线运动是指物体沿着曲线路径移动的运动。
本节介绍了曲线运动的特点以及与曲线运动相关的运动学原理。
3. 旋转运动问题3.1 定义和分类机械系统的旋转运动可以分为平面旋转和空间旋转两类。
本节讲解了这两种运动的定义和分类。
3.2 平面旋转平面旋转是指物体围绕一个轴线在平面内旋转的运动。
本节介绍了平面旋转的基本特点和相关的运动学原理。
3.3 空间旋转空间旋转是指物体在三维空间中绕一个轴线旋转的运动。
本节讲解了空间旋转的特点以及与空间旋转相关的运动学原理。
4. 速度和加速度分析4.1 速度分析速度是描述机械系统运动状态的重要参数。
本节介绍了速度的计算方法和分析技巧。
4.2 加速度分析加速度是描述机械系统运动加速度的参数。
本节讲解了加速度的计算方法和分析技巧。
5. 音速和减速控制5.1 音速控制音速控制是调节机械系统的运动速度的一种方法。
本节介绍了音速控制的基本原理和应用。
5.2 减速控制减速控制是调节机械系统的运动速度的另一种方法。
本节讲解了减速控制的基本原理和应用。
6. 总结本章总结了机械原理第二章的内容,并提出了进一步研究的方向和建议。
注意:本文中可能没有具体章节标题,因为要求文中不能有重复的文字。