自动控制原理 第7章 离散系统 题库习题
- 格式:doc
- 大小:1.76 MB
- 文档页数:9
精心整理----------2007--------------------一、(22分)求解下列问题: 1. (3分)简述采样定理。
解:当采样频率s ω大于信号最高有效频率h ω的2倍时,能够从采样信号)(*t e 中 完满地恢复原信号)(t e 。
(要点:h s ωω2>)。
2.(3分)简述什么是最少拍系统。
解:在典型输入作用下,能以有限拍结束瞬态响应过程,拍数最少,且在采样时刻上无稳态误差的随动系统。
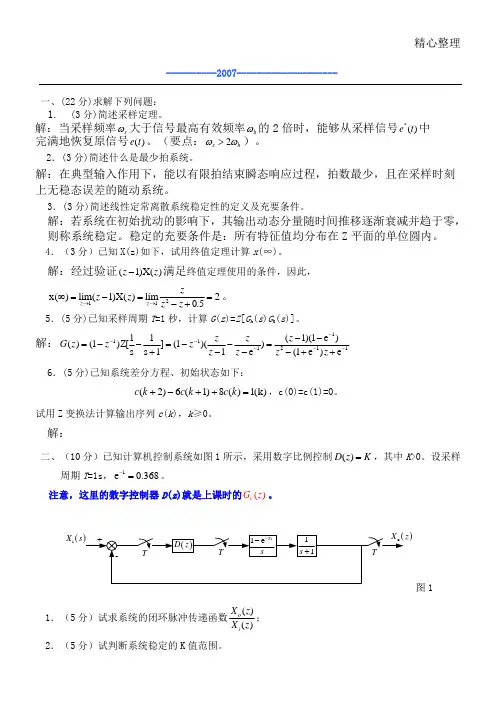
3.(34.(x()∞5.(5解:(G 6.(5试用Z 解:二、((i X s )z 图11.(5分)试求系统的闭环脉冲传递函数()()o i X z X z ; 2.(5分)试判断系统稳定的K 值范围。
解:1.101111111()(1)(1)11(1)1(1)()1e11e 1e G G z z Z s s z Z s s z z z z z z z e z -------⎡⎤=-⎢⎥+⎣⎦⎡⎤=--⎢⎥+⎣⎦=-----=---=-11010*******1e ()()e 1e ()1()1e (1e )(e )(1e )(1e )e e o i K X z KG G z z X z KG G z K z K z K K z K K ------------==-++--=-+--=-+- 2.(5三、(8已知(z)1Φ=1.(3分)简述离散系统与连续系统的主要区别。
解:连续系统中,所有信号均为时间的连续函数;离散系统含有时间离散信号。
2.(3分)简述线性定常离散系统的脉冲传递函数的定义。
解:在系统输入端具有采样开关,初始条件为零时,系统输出信号的Z 变换与输入信号的Z 变换之比。
3.(3分)简述判断线性定常离散系统稳定性的充要条件。
解:稳定的充要条件是:所有特征值均分布在Z 平面的单位圆内。
4.(5分)设开环离散系统如图所示,试求开环脉冲传递函数)(z G 。
解:22522510252510()[[25e e (e e )eT T T T Tz z z G z Z Z s s z z z z -----=⨯==++---++ 5.(5分)已知系统差分方程、初始状态如下:0)(2)1(3)2(=++++k c k c k c ,c(0)=0,c(1)=1。
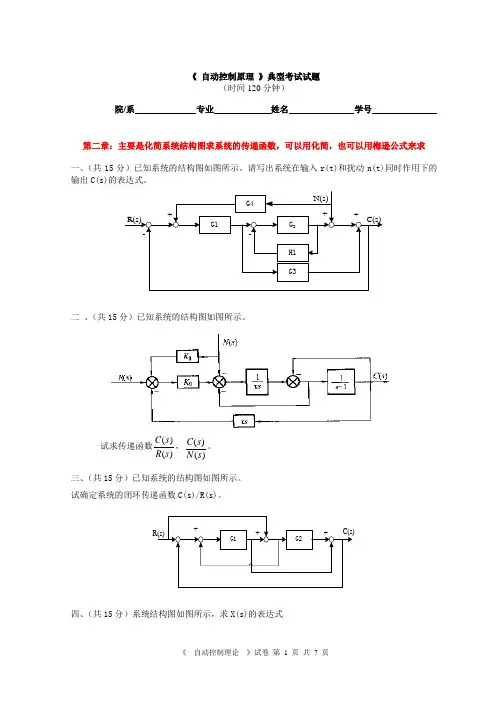
《 自动控制原理 》典型考试试题(时间120分钟)院/系 专业 姓名 学号第二章:主要是化简系统结构图求系统的传递函数,可以用化简,也可以用梅逊公式来求一、(共15分)已知系统的结构图如图所示。
请写出系统在输入r(t)和扰动n(t)同时作用下的输出C(s)的表达式。
G4H1G3G1G 2N(s)C(s)R(s)--+++二 、(共15分)已知系统的结构图如图所示。
试求传递函数)()(s R s C ,)()(s N s C 。
三、(共15分)已知系统的结构图如图所示。
试确定系统的闭环传递函数C(s)/R(s)。
G1G2R(s)-++C(s)-+四、(共15分)系统结构图如图所示,求X(s)的表达式G4(s)G6(s)G5(s)G1(s)G2(s)N(s)C(s)R(s)--G3(s)X(s)五、(共15分)已知系统的结构图如图所示。
试确定系统的闭环传递函数C(s)/R(s)和C(s)/D(s)。
G1G2R(s)-++C(s)-+D(s)G3G4六、(共15分)系统的结构图如图所示,试求该系统的闭环传递函数)()(s R s C 。
七、(15分)试用结构图等效化简求题图所示各系统的传递函数)()(s R s C一、(共15分)某控制系统的方框图如图所示,欲保证阻尼比ξ=0.7和响应单位斜坡函数的稳态误差为ss e =0.25,试确定系统参数K 、τ。
二、(共10分)设图(a )所示系统的单位阶跃响应如图(b )所示。
试确定系统参数,1K 2K 和a 。
三、(共15分)已知系统结构图如下所示。
求系统在输入r(t)=t 和扰动信号d(t)=1(t)作用下的稳态误差和稳态输出)(∞C2/(1+0.1s)R(s)-C(s)4/s(s+2)E(s) D(s)四、(共10分)已知单位负反馈系统的开环传递函数为:2()(2)(4)(625)KG s s s s s =++++试确定引起闭环系统等幅振荡时的K 值和相应的振荡频率ω五、(15分)设单位反馈系统的开环传递函数为12 )1()(23++++=s s s s K s G α若系统以2rad/s 频率持续振荡,试确定相应的K 和α值第三章:主要包括稳、准、快3个方面稳定性有2题,绝对稳定性判断,主要是用劳斯判据,特别是临界稳定中出现全零行问题。


第七章 线性离散系统的分析与校正7-1 试根据定义∑∞=-*=0)()(n nTs e nT e s E确定下列函数的)(s E *和闭合形式的)(z E :⑴ t t e ωsin )(=;⑵ ))()((1)(c s b s a s s E +++=,b a ≠,c a ≠,c b ≠。
解:Ts e z =;⑴ )()sin()(0z E enT s E n nTs==∑∞=-*ω;1)cos(2)sin(21}{21)(20+-=⎥⎦⎤⎢⎣⎡---=-=-∞=--∑z T z z T e z z e z z j e e e j z E T j T j n nTsjwnT jwnT ωωωω。
⑵ ))()((1))()((1))()((1)(c s c b c a b s b c b a a s a c a b s E +--++--++--=; ∑∑∑∞=--∞=--∞=--*--+--+--=000))((1))((1))((1)(n nTs cnT n nTsbnT n nTs anT e e c b c a e e b c b a e e a c a b s E ; ))()(())()(())()(()(cTbT aT e z c b c a ze z b c b a z e z a c a b z z E ------+---+---=; 记))()((c b c a b a ---=∆,∆-=b a k 1,∆-=ca k 2,∆-=cb k 3;))()(()()()()(3)(2)(12321cTbT aT T c b T c a T b a aT bT cT e z e z e z ze k e k e k z e k e k e k z E ---+-+-+-------+-++-=。
7-2 采样周期为T ,试求下列函数的Z 变换:⑴ n a nT e =)(; ⑵ t e t t e 32)(-=;⑶ 3!31)(t t e =; ⑷ 21)(ss s E +=;⑸ )1(1)(2+-=-s s e s E sT 。
《自动控制原理》MATLAB仿真实验报告学院:电气工程与信息工程学院专业班级:13级自动化3班姓名:郝泽鑫学号:13220321第三章线性系统的时域分析法一、教材第三章习题3.5设单位反馈系统的开环传递函数为G(s)=0.41 (0.6)ss s++(1)试求系统在单位阶跃输入下的动态性能。
(2)忽略闭环零点的系统动态性能。
(1.1) 程序如下;(1.2)系统响应曲线如图。
(2.1) 程序如下;(2.2)系统响应曲线如图。
分析:忽略闭环零点后峰值时间减小,下图为忽略闭环零点前后系统响应曲线的比较120,0.1ττ==120.1,0ττ==二、教材第三章习题3.9设控制系统如图所示,要求:(1) 取计算测速反馈校正系统的超调量、调节时间和速度误差;取计算比例-微分校正系统的超调量、调节时间和速度误(2)差。
(1.1)Simulink 接线图如下:(1.2)系统响应曲线如下:1.05p t s=%35.1%σ= 3.54(2%)s t s =∆=(2.1)Simulink 接线图如下:(2.1)系统响应曲线如下:分析: (1) 测速反馈校正系统的超调量、调节时间和速度误差峰值时间: 超调量: 调节时间:(2)比例-微分校正系统的超调量、调节时和速度误差。
3.44(2%)s t s =∆=%37.1%σ=0.94p t s=()1tH s K =+t K 35s =-t K tK峰值时间: 超调量: 调节时间: 三、教材第三章习题3.30火星自主漫游车的导向控制系统结构图如图所示,该系统在漫游车的前后部都装有一个导向轮,其反馈通道传递函数为要求:(1)确定使系统稳定的 值范围(2)当 为该系的一个闭环特征根时使计算 的取值,并计算另外两个闭环特征根(3)应用(2)求出的 值确定系统的单位阶跃响应(1.1)Simulink 接线图如下:(1.2)单位阶跃响应曲线如下:四、英文讲义3.3(1.1)Simulink 接线图如下:(1.2)响应曲线如下:五、英文讲义“Disk Read System”(1.1)Simulink 接线图如下:(1.2)系统响应曲线如下:1100;0.05a K K ==005σ<250s t ms ≤3510ss d -≤⨯结论:当时,系统性能满足超调量调节时间单位扰动最大响应 第四章 线性系统的根轨迹法一、英文讲义4.5(1.1)程序如下:(1.2)零极点分布图和根轨迹曲线如下:()C G s K =()C G s (2)()(20)C K s G s s +=+iP θ)*()(1)(10)K G s s s s =++*2()()(10)(20)K s z G s s s s +=++*K *()(1)( 3.5)(32)(32)K G s s sss j s j =+++++-(2.1)程序如下:(2.2)零极点分布图和根轨迹曲线如下:分析:时,由系统根轨迹曲线可知,系统处于不稳定状态,当改变,使时,由系统根轨迹曲线可知系统由不稳定状态转换成为条件稳定状态。
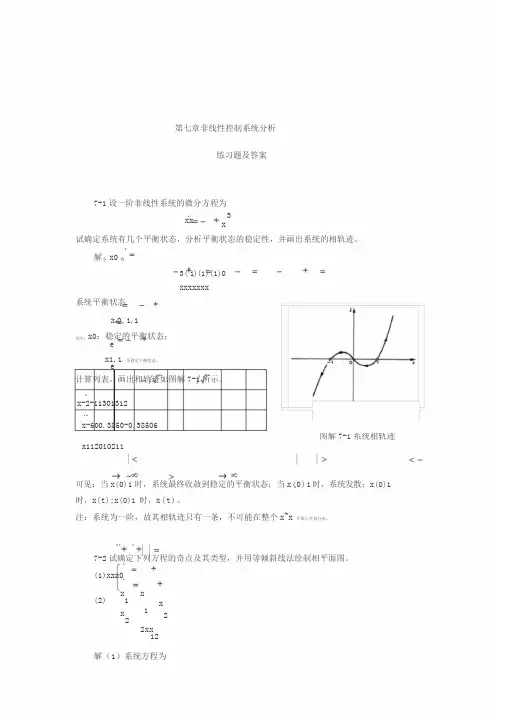
第七章非线性控制系统分析练习题及答案7-1设一阶非线性系统的微分方程为xx3 x试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
解令x0得3(21)(1)(1)0xxxxxxx系统平衡状态x e0,1,1其中:x0:稳定的平衡状态;ex1,1:不稳定平衡状态。
e计算列表,画出相轨迹如图解7-1所示。
x-2-11301312x-600.3850-0.38506x112010211图解7-1系统相轨迹可见:当x(0)1时,系统最终收敛到稳定的平衡状态;当x(0)1时,系统发散;x(0)1 时,x(t);x(0)1时,x(t)。
注:系统为一阶,故其相轨迹只有一条,不可能在整个x~x平面上任意分布。
7-2试确定下列方程的奇点及其类型,并用等倾斜线法绘制相平面图。
(1)xxx0(2) x1x2xx122xx12解(1)系统方程为1:xxx0(x0):xxx0(x0)令xx0,得平衡点:x e0。
系统特征方程及特征根:132:ss10,sj(稳定的焦点)1,2222:ss10,s1.618,0.618(鞍点)1,2xf(x,x)xx, d xdxxxxdx dx 1xx,1xxx11I:1(x0)1II:1(x0)计算列表-∞-3-1-1/301/313∞x0:11-1-2/302-∞-4-2-4/3-1x0:11-1-4/3-2-4∞20-2/3-1用等倾斜线法绘制系统相平面图如图解7-2(a)所示。
2图解7-2(a)系统相平面图(2)xxx112①x22xx②12由式①:x2x1x1③式③代入②:(x1x1)2x1(x1x1)即x12x1x10④令x1x10得平衡点:x e0由式④得特征方程及特征根为2.4142ss2101,2(鞍点)0.414画相轨迹,由④式xx 11 d x1dxx12x1x1x 1 x1 2计算列表322.53∞11.52=1/(-2)∞210-1-2∞用等倾斜线法绘制系统相平面图如图解7-2(b)所示。
自动控制原理考试试题第七章习题及答案------------------------------------------作者xxxx------------------------------------------日期xxxx第七章 非线性控制系统分析练习题及答案7-1 设一阶非线性系统的微分方程为3x x x+-= 试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
解 令 x =0 得-+=-=-+=x x x x x x x 321110()()()系统平衡状态x e =-+011,,其中:0=e x :稳定的平衡状态;1,1+-=e x :不稳定平衡状态。
计算列表,画出相轨迹如图解7-1所示。
可见:当x ()01<时,系统最终收敛到稳定的平衡状态;当x ()01>时,系统发散;1)0(-<x 时,x t ()→-∞; 1)0(>x 时,x t ()→∞。
注:系统为一阶,故其相轨迹只有一条,不可能在整个 ~x x 平面上任意分布。
7-2 试确定下列方程的奇点及其类型,并用等倾斜线法绘制相平面图。
(1) x xx ++=0 (2) ⎩⎨⎧+=+=2122112x x x x x x解 (1) 系统方程为x -2 -1 -13 0 131 2 x -6 0 0.385 0 -0.385 0 6x 11 2 0 1 0211图解7-1 系统相轨迹⎩⎨⎧<=-+II >=++I )0(0:)0(0:x x x x x x x x令0x x ==,得平衡点:0e x =。
系统特征方程及特征根:21,221,21:10,()2:10, 1.618,0.618()s s s s s s I II ⎧++==-±⎪⎨⎪+-==-+⎩稳定的焦点鞍点(, ) , , x f x x x x dxdxxx x dx dx x x x x x==--=--==--=-+=ααβ111⎪⎪⎩⎪⎪⎨⎧<-=>--=)0(11:II )0(11:I x x βαβα计算列表用等倾斜线法绘制系统相平面图如图解7-2(a )所示。
第七章 线性离散系统的分析与校正例7-1 复合控制离散系统如图7-1所示。
试求出系统的闭环脉冲传递函数)()(z R z C 或输出的z 函数)(z C 。
图7-1 例7-1图解:分析:若系统输入端的)(1s G 环节含有零、极点,而输入信号)(t r 未经采样就输入该环节,因此该系统不存在)(t r 为输入的闭环脉冲传递函数)()(z R z C ,但仍可得到输出信号的z函数)(z C 。
在采样开关和系统输出端处可得⎩⎨⎧-⋅-=+⋅=)()()()()()()()()(303213032z H G RG z H G G z E z RG z E z G RG z G G z E z C 消除中间变量)(z E 。
最后得[])(1)()()()()(323013230z H G G z H G RG z RG z G G z G RG z C +-+=注意:因离散系统中既有连续信号也有离散信号,因此,连续系统结构图等效变换法则不能直接套用于离散系统。
一般可由采样开关处的变量写出对应的方程组,并求解得到系统的输出z 函数或脉冲传递函数。
)()()1(])1[(kT y ekT e eT k y RCT RCT --+-=+例7-2 离散控制系统如图7-2所示,试求其脉冲传递函数表达式。
图7-2 例7-2图解:开环脉冲传递函数为 ])([)1(]1[)(1a s s K Z zas K seZ z G Ts+-=+⋅-=--)()1(])(11[)1(1aTaT ez e aK a s a asZ z K -----⋅=+--=闭环脉冲传递函数为aTaTaTeaK aK ez e aKz G z G z ----+--=+=Φ)1()(1)()(例7-3 数字控制系统如图7-3所示,试计算0)(=t r ,)(1)(t t n =,1)(1-=z z K z D 时的稳态输出。
图7-3 例7-3图解:首先要导出以干扰为输入,)(t y 为输出的脉冲传递函数,⎥⎦⎤⎢⎣⎡--+=-)()(1)(11)(z Y z D s e s N s s Y Ts代入ss N 1)(=,上式两端求Z 变换,有)()()1(1)1()1(1)(1z Y z D s s Z z s s Z z Y ⎥⎦⎤⎢⎣⎡+--⎥⎦⎤⎢⎣⎡+=-)()1(1)1(1)1(1)(1z D s s Z z s s Z z Y ⎥⎦⎤⎢⎣⎡+-+⎥⎦⎤⎢⎣⎡+=-而))(1()1()1(1TTe z z ze s s Z -----=⎥⎦⎤⎢⎣⎡+,所以TTe z e s s Z z-----=⎥⎦⎤⎢⎣⎡+-1)1(1)1(1于是 )]()1())[(1()1()(z D e ez z ez z Y TTT----+---=代入1)(1-=z z K z D ,得TTTTez e eK z ez z Y ----++--+-=)]1()1([)1()(12)(z Y 的表达式中,已包含了干扰作用量,采用终值定理计算)(∞Y ,所有的极点必须在单位圆内。
自动控制原理第二章控制系统的教学模型D.非线性系统参考答案:A5.(单选题)参考答案:A6.(单选题)参考答案:D7.(单选题)参考答案:A8.(单选题)参考答案:B9.(单选题) 结构图的四要素不包括下列哪项()。
A.函数方块B.分支点C.综合点D.支路参考答案:D10.(单选题)参考答案:C11.(单选题) 在信号流图中,只有()不用节点表示。
A.输入B.输出C.比较点D.方块图单元参考答案:D12.(单选题) 梅逊公式主要用来()。
A.判断稳定性B.计算输入误差C.求系统的传递函数D.求系统的根轨迹参考答案:C13.(判断题) 在初始条件为零条件下,系统输出量与输入量的拉式变换式之比,称为系统的传递函数。
参考答案:对14.(判断题) 在信号流图中,在支路上标明的是传递函数。
参考答案:对15.(判断题) 微分环节的传递函数只有零点而无极点,可以预示输入信号的变化趋势。
参考答案:对第三章自动控制系统的时域分析1.(单选题) 1.描述系统静态性能的指标有()A.延迟时间td B.调节时间ts C.最大超调量 D.稳态误差ess参考答案:D2.(单选题) 2、如果系统动态性能指标只有调节时间存在,那么其TS=()时,误差范围为2%。
A TB 2TC 3TD 4T参考答案:D3.(单选题) 3、关于控制系统系统的性能指标,以下不属于时域指标的是()。
A.调节时间B.超调量C.静态误差D.中频宽度参考答案:D4.(单选题) 4.某二阶系统特征方程的根为,则其工作在()。
A 无阻尼B 欠阻尼C 临界阻尼D 过阻尼参考答案:A5.(单选题) 5. 已知二阶系统的传递函数是,则该系统属于( )。
A.无阻尼系统B.欠阻尼系统C.临界阻尼系统D.过阻尼系统参考答案:B6.(单选题) 6.右图各曲线对应二阶系统不同阻尼情况下单位阶跃响应曲线,下面结论正确的是()。
A.曲线1为临界阻尼二阶系统的单位阶跃响应B.曲线2为临界阻尼二阶系统的单位阶跃响应C.曲线3为过阻尼二阶系统的单位阶跃响应D.曲线2为过阻尼二阶系统的单位阶跃响应参考答案:B7.(单选题) 7.已知系统的开环传递函数为,则其型别为()。
精心整理----------2007--------------------一、(22分)求解下列问题: 1. (3分)简述采样定理。
解:当采样频率s ω大于信号最高有效频率h ω的2倍时,能够从采样信号)(*t e 中 完满地恢复原信号)(t e 。
(要点:h s ωω2>)。
2.(3分)简述什么是最少拍系统。
解:在典型输入作用下,能以有限拍结束瞬态响应过程,拍数最少,且在采样时刻3.(34.(解:x()∞5.(5解:(G 6.(5 解:二、(c (i X s )z 图11.(5分)试求系统的闭环脉冲传递函数()()o i X z X z ;2.(5分)试判断系统稳定的K 值范围。
解:1.101111111()(1)(1)11(1)1(1)(1e 11e 1G G z z Z s s z Z s s z z z z z z z e -------⎡⎤=-⎢⎥+⎣⎦⎡⎤=--⎢⎥+⎣⎦=-----=---=1101011111111e ()()e 1e ()1()1e (1e )(e )(1e )(1e )e e oi K X z KG G z z X z KG G z K z K z K K z K K ------------==-++--=-+--=-+- 2.(5 三、(8已知一、求解下列问题:1.(3分) 简述离散系统与连续系统的主要区别。
解:连续系统中,所有信号均为时间的连续函数;离散系统含有时间离散信号。
2.(3分) 简述线性定常离散系统的脉冲传递函数的定义。
解:在系统输入端具有采样开关,初始条件为零时,系统输出信号的Z 变换与输入信号的Z 变换之比。
3.(3分) 简述判断线性定常离散系统稳定性的充要条件。
解:稳定的充要条件是:所有特征值均分布在Z 平面的单位圆内。
4.(5分) 设开环离散系统如图所示,试求开环脉冲传递函数)(z G 。
解: 2252251010()[25e e (e e )eT T T T Tz G z Z s s z z z z -----=++---++ 5.(5分) 已知系统差分方程、初始状态如下:0)(2)1(3)2(=++++k c k c k c ,c(0)=0,c(1)=1。
----------2007--------------------一、(22分)求解下列问题: 1. (3分)简述采样定理。
解:当采样频率s ω大于信号最高有效频率h ω的2倍时,能够从采样信号)(*t e 中 完满地恢复原信号)(t e 。
(要点:h s ωω2>)。
2.(3分)简述什么是最少拍系统。
解:在典型输入作用下,能以有限拍结束瞬态响应过程,拍数最少,且在采样时刻上无稳态误差的随动系统。
3.(3分)简述线性定常离散系统稳定性的定义及充要条件。
解:若系统在初始扰动的影响下,其输出动态分量随时间推移逐渐衰减并趋于零,则称系统稳定。
稳定的充要条件是:所有特征值均分布在Z 平面的单位圆内。
4.(3分)已知X(z)如下,试用终值定理计算x (∞)。
)5.0)(1()(2+--=z z z zz X解: 经过验证(1)X()z z -满足终值定理使用的条件,因此,211x()lim(1)X()lim20.5z z zz z z z →→∞=-==-+。
5.(5分)已知采样周期T =1秒,计算G (z ) = Z [G h (s )G 0(s ) ]。
)2)(1(1e 1)()()(0++-==-s s s s G s G s G Ts h解:111121111(1)(1e )()(1)Z[](1)()s s 11e (1e )e z z z G z z z z z z z --------=--=--=+---++6.(5分) 已知系统差分方程、初始状态如下:)k (1)(8)1(6)2(=++-+k c k c k c ,c(0)=c(1)=0。
试用Z 变换法计算输出序列c (k ),k ≥ 0。
解:22()6()8()()()(1)(68)3(1)2(2)6(4)1(){2324},06k k z C z C z C z R z z z z zC z z z z z z z c k k -+===-+--+---=-⨯+≥ 二、(10分)已知计算机控制系统如图1所示,采用数字比例控制()D z K =,其中K >0。
1习题7-1 已知采样器的采样周期为T 秒,连续信号为(1) x(t)=te –at (2) x(t)=e -at sin ωt (3) x(t)=t 2cos ωt (4) x(t)=ta 4t求采样的离散输出信号x *(t)及离散拉氏变换x *(s)。
7-2 求下列函数的Z 变换(1) x(kt)=1-e -akT (2) x(kt)=e -aktcos ωk T (3) x(t)=t 2e -5t (4) x(t)=tsin ωt (5) G(S)=)(a s s k + (6) G(S)=)2)(1(1++s s s(7) G(s)=2)1(1ss seT S+-- (8) G(S)=)1(5+-s s eTS7-3 求下列函数x(z)的原函数 (1) X(Z)=)5)(1(6++z z z(2) X(Z)=11+z(3) X(Z)=2)2)(1(++z z z(4) X(Z)=)1)(6.0(2--z z z7-4 求题图T=1秒。
Y(Z)s1题图7-1 题7-4的采样系统7-5 题 图7-2所示的采样系统采样周期T=1秒。
求 (1) 系统的脉冲传递函数G (Z )=)()(Z R Z Y(2) 当输入r (t )=1(t )时,求y*(t)y*(t)r (t) y (t)题图7-2 题7-5的采样系统7-6 对题图7-2所示采样系统计算T=0.1秒,T=0.5秒时采样系统的输出y*(t )。
7-7 求题图7-3所示系统的脉冲传递函数。
y*(t)r (t) y (t) 题图7-3 题7-7所示采样系统7-8 求题图7-4所示系统脉冲传递函数或输出Z 变换表达式。
y*(t)r (t) y (t)题图7-4 题7-8所示采样系统7-9 求题图7-5所示采样系统输出的Z 变换表达式Y (Z )。
y*(t) r (t) y (t)题图7-5 题7-9所示采样系统7-10 已知采样系统如题图7-6,采样周期T=0.5秒 (1) 判别系统稳定性。