曲柄摇杆机构优化设计说明
- 格式:doc
- 大小:421.00 KB
- 文档页数:13
曲柄摇杆机构设计方法曲柄摇杆机构设计方法文档范本一、引言在机械设计领域中,曲柄摇杆机构是一种常见且重要的机构,它能够将旋转运动转换为往复运动。
本文档旨在提供一种详细的曲柄摇杆机构设计方法,以帮助工程师们更好地理解和应用该机构。
二、机构构成与功能1:曲柄:曲柄是机构的旋转部分,它通过旋转运动带动摇杆的往复运动。
2:摇杆:摇杆是机构的往复部分,其运动轨迹由曲柄的旋转和摇杆长度决定。
3:小端杆:小端杆连接曲柄与摇杆,使二者能够实现相对运动。
4:大端杆:大端杆连接摇杆与其他部件,传递摇杆的运动到所需位置。
三、设计步骤和考虑因素1:确定工作要求:根据实际应用,确定曲柄摇杆机构所需完成的工作和要求。
2:设计曲柄和摇杆的运动路径:根据工作要求和机构构型,确定曲柄和摇杆的运动路径,并绘制相应的示意图。
3:计算曲柄和摇杆的长度:根据运动路径以及机构的几何结构,计算曲柄和摇杆的长度,确保其能够满足工作要求。
4:确定杆长度:根据曲柄和摇杆的长度,确定小端杆和大端杆的长度,保证牢固可靠。
5:进行材料选择:根据机构的工作环境和所需承受的载荷,选择合适的材料以确保机构的强度和耐久性。
6:进行摩擦和润滑剂的选择:考虑摇杆与杆以及曲柄的接触情况,选择适当的润滑剂以减小摩擦,提高机构的效率和寿命。
7:进行强度计算:对机构的各个关键部位进行强度计算,以确保其在工作过程中不会发生破坏或变形。
8:进行运动分析和优化:利用运动学原理和模拟软件对机构的运动过程进行分析和优化,以确保其满足工作要求。
四、附件1:设计图纸:附上设计过程中所绘制的曲柄摇杆机构的设计图纸。
2:强度计算报告:附上对机构各个部件进行强度计算的报告。
五、法律名词及注释1:版权:指对于创作出来的文学、艺术和科学作品的拥有权,包括复制、分发、翻译等权利。
2:专利:指为新的技术、产品或产品的制造方法等发明所授予的专有权。
3:商标:指用于区别某个商品或服务来源的标识,具有独立性、显著性和可辨识性等特点。
曲柄摇杆机构的最优设计[摘要] 图解法设计曲柄摇杆机构时为了满足传力性能,往往需要重复进行,结果也不唯一。
本文采用0.618法,在给定行程速比系数k、摇杆摆角φ、长度l4等前提下,采用机械最优设计,使γmin最大,得到了设计最优解。
并讨论了行程速比系数k、摇杆摆角φ的取值范围。
[关键词] 曲柄摇杆机构机械最优设计0.618法1 引言机械最优设计是在给定的载荷或环境条件下,在机械产品的性态、几何尺寸关系或其他因素的限制范围内,选取设计变量,建立目标函数并使其获得最优值的一种新的设计方法。
设计变量、目标函数和约束条件这三者在设计空间(以设计变量为坐标轴组成的实空间)的几何表示中构成设计问题[1]。
最优设计是保证设计合理性、提高设计效率的一种有效方法。
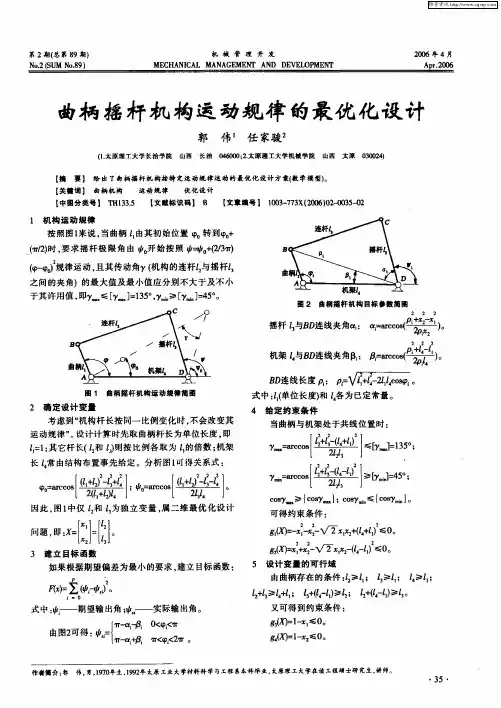
曲柄摇杆机构中,传动角γ越大,对机构的传力愈有利,故常用传动角的大小及变化情况来衡量机构传力性能的好坏。
考虑到机构运动过程中传动角γ是变化的,为了保证机构传力性能良好,必须使最小传动角γmin≥[γ]。
传统的图解设计方法往往需要重复进行,结果也不唯一。
本文采用0.618法,在给定行程速比系数k、摇杆摆角φ、长度l4等前提下,运用机械最优设计,使γmin最大,得到了设计最优解。
并讨论了行程速比系数k、摇杆摆角φ的取值范围。
在实现过程中,本文采用C 语言实现优化过程编程,从而使结果更加精确、直观。
2 曲柄摇杆机构的最优设计(1)寻优目标函数的确定曲柄摇杆机构γmin出现在主动曲柄与机架共线的两位置之一处[2]。
以γmin 最大为寻优目标函数,即:maxf(x)=γmin=(γ1, γ3)min其中,γ1=arccosγ2= arccos(2)设计变量的选择如图1所示,考虑到一旦曲柄支点A确定,则机架l1=AD,其他设计参数l2、l3也随之确定。
因此,只需取曲柄为设计变量即可,即x=l2。
图1设计参数间的几何关系(3)设计参数间的几何关系若已知曲柄x时,有:l3=l1=其中,C1C2=2l4sin(Φ/2)∠AC2D=90°-arcsin+Φ/2(4)设计变量的取值范围根据文献[3]所述,寻优区间起始点xmin= C1C2(1-cosθ)/2sinθ;寻优区间终点xmax= C1C2/2。
优化设计-曲柄摇杆机构优化设计优化设计-曲柄摇杆机构优化设计1:引言1.1 背景在机械工程中,曲柄摇杆机构是常用的传动机构之一,具有转动-直线运动转换的功能。
然而,由于曲柄摇杆机构的结构复杂性以及不同工况下的性能要求,如何对曲柄摇杆机构进行优化设计成为一项重要的工作。
1.2 目的本文旨在对曲柄摇杆机构进行优化设计,以提高其运动精度、工作效率和使用寿命。
2:功能需求分析2.1 运动要求根据使用场景和应用需求,分析曲柄摇杆机构需要实现的运动要求,包括速度、加速度、行程等方面的要求。
2.2 负载要求确定曲柄摇杆机构在工作过程中所承受的负载要求,包括静载荷和动载荷。
2.3 精度要求根据实际应用场景,分析曲柄摇杆机构需要达到的运动精度要求,如定位精度、重复定位精度等。
3:结构设计优化3.1 曲柄摇杆机构的结构形式选择根据运动要求和负载要求,结合现有的曲柄摇杆机构结构形式,选择合适的结构形式来满足设计要求。
3.2 关键部件的优化设计对曲柄摇杆机构的关键部件进行优化设计,如曲柄轴、摇杆、连杆等,提高其强度和刚度,减小重量和惯性。
4:润滑与密封设计4.1 润滑系统设计根据工作条件和运动要求,设计曲柄摇杆机构的润滑系统,确保关键部件的摩擦副有足够的润滑。
4.2 密封设计对曲柄摇杆机构的关键部位进行密封设计,防止润滑剂泄漏或外界杂质进入,保证机构的工作正常。
5:动力学分析与优化5.1 运动学分析通过运动学分析,研究曲柄摇杆机构的运动规律和轨迹,为后续的动力学分析提供基础。
5.2 动力学分析根据负载要求和运动要求,进行曲柄摇杆机构的动力学分析,考虑受力分布和扭矩传递,优化曲柄摇杆机构的结构参数和材料选择。
6:工艺制造优化6.1 工艺优化针对曲柄摇杆机构的结构特点和制造工艺要求,进行工艺优化,提高制造精度和工艺可行性。
6.2 制造工艺选择根据实际情况,选择适合曲柄摇杆机构的制造工艺,如铸造、锻造、加工等。
7:仿真与试验验证7.1 仿真分析使用计算机辅助工程技术,对曲柄摇杆机构进行有限元分析、动力学仿真等,验证优化设计方案的可行性。
设计实践设计计算说明书题目:学院:机电工程学院班号:08401学号:1050840124姓名:林飞跃日期:2007年10月04号设计实践任务书题目:设计任务及要求:已知曲柄摇杆机构中摇杆CD的长度c和摆角Ψ,以及行程速度变化系数K,要求设计该四杆机构原始信息:摆角Ψ=30°行程速比系数K=1.2极位夹角θ=16.364°摇杆长度C=60mmψ0=60°一.机构简图:二.设计过程:1.由下图:计算得:a=12.00982mmb=70.20893mmd=56.21308mmγmin=38.698°2.画图法 :1) 任选转动副D 的位置,并按CD 之长和摆角Ψ121C C NFOC ME 作摇杆的两个极限位置1DC 和2DC 。
2) 作∠12C C O =∠21C C O =90°-θ,得1C O 和2C O 的交点O 。
以O 为圆心和1OC 为半径作圆h ,则圆h 上除劣弧12C C 以外的各点对弦12C C 所张的圆周角均为θ。
将两极限位置的摇杆延长使之与圆h 交于E 和F 两点。
则圆弧1C ME 或2C NF 上任一点均可作为固定铰链中心A 。
显然A 不能取在弧EF 上,否则所得机构不能满足摇杆摆角要求。
3) 当A 点位置确定后,即得机架AD 的长度d 。
同时,按极限位置曲柄与连杆共线的几何特点可得l AC1=b-a ,l AC2=b+a,由此可求得连杆BC的长度b和曲柄AB的长度a。
三.运动分析参考文献:《机械设计基础》----宋宝玉《机械设计基础网络课程》。
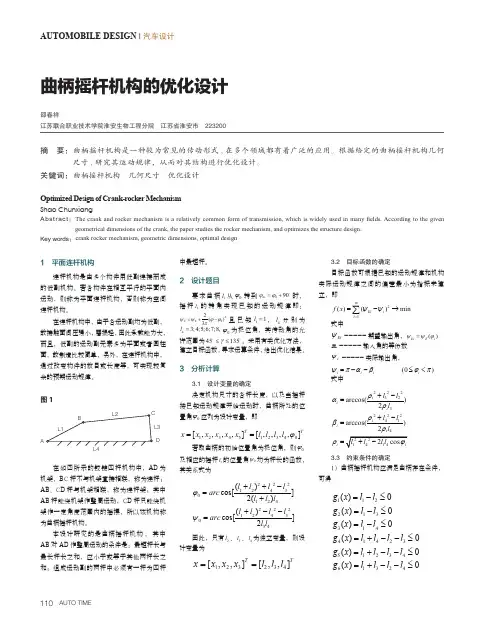
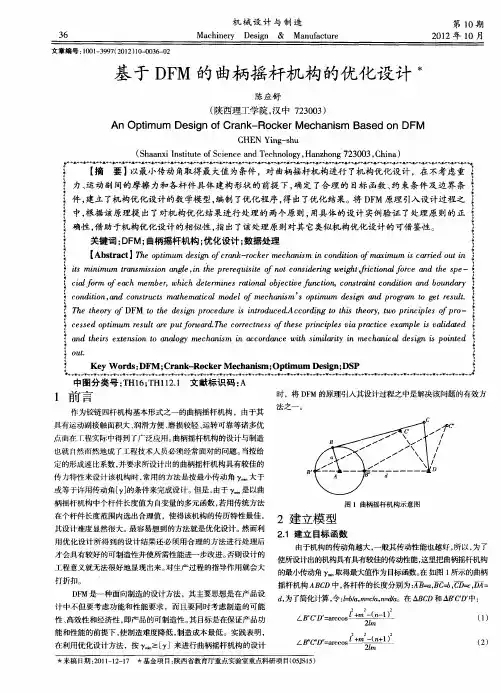
AUTOMOBILE DESIGN | 汽车设计曲柄摇杆机构的优化设计邵春祥江苏联合职业技术学院淮安生物工程分院 江苏省淮安市 223200摘 要: 曲柄摇杆机构是一种较为常见的传动形式,在多个领域都有着广泛的应用。
根据给定的曲柄摇杆机构几何尺寸,研究其运动规律,从而对其结构进行优化设计。
关键词:曲柄摇杆机构 几何尺寸 优化设计1 平面连杆机构连杆机构是由多个构件用低副连接而成的低副机构。
若各构件在相互平行的平面内运动,则称为平面连杆机构,否则称为空间连杆机构。
在连杆机构中,由于各运动副均为低副,故接触面间压强小,磨损轻,因此承载能力大,而且,低副的运动副元素多为平面或者圆柱面,故制造比较简单,另外,在连杆机构中,通过改变构件的数目或长度等,可实现较复杂的预期运动规律。
图1AL1L4L2L3DCB在如图所示的铰链四杆机构中,AD为机架,BC杆不与机架直接相联,称为连杆;AB、CD杆与机架相联,称为连杆架;其中AB杆能绕机架作整周运动,CD杆只能绕机架作一定角度范围内的摇摆,所以该机构称为曲柄摇杆机构。
本设计研究的是曲柄摇杆机构, 其中AB对AD作整周运动的条件是:最短杆长与最长杆长之和,应小于或等于其他两杆长之和;组成运动副的两杆中必须有一杆为四杆中最短杆。
2 设计题目要求曲柄1l从0ϕ转到090mϕϕ=+ 时,摇杆3l的转角实现已知的运动规律即:2002()3Eψψϕϕπ=+−且已知11l=,4l分别为43;4;5;6;7;8,l=ϕ为极位角,其传动角的允许范围为45135γ≤≤。
采用有关优化方法,建立目标函数,寻求运算条件,给出优化结果。
3 分析计算3.1 设计变量的确定决定机构尺寸的各杆长度,以及当摇杆按已知运动规律开始运动时,曲柄所处的位置角0ϕ应列为设计变量,即1234512340[,,,,][,,,,]T Tx x x x x x l l l lϕ=若取曲柄的初始位置角为极位角,则0ϕ及相应的摇杆3l的位置角0ψ均为杆长的函数,其关系式为2221243124222124334()cos[]2()()cos[]2l l l larcl l ll l l larcl lϕψ++−=++−−=因此,只有2l、3l、4l为独立变量,则设计变量为123234[,,][,,]T Tx x x x l l l=3.2 目标函数的确定目标函数可根据已知的运动规律和机构实际运动规律之间的偏差最小为指标来建立,即21()()minmEi iif xψψ==−→∑式中Eiψ-----期望输出角,()Ei E iψψϕ=m-----输入角的等份数iψ-----实际输出角,i i iψπαβ=−− (0)iϕπ≤<式中222323222414221414arccos()2arccos()22cosiiiiiii il lll lll l l lραρρβρρϕ+−=+−=+−3.3 约束条件的确定1)曲柄摇杆机构应满足曲柄存在条件,可得112213314414235123461324()0()0()0()0()0()0g x l lg x l lg x l lg x l l l lg x l l l lg x l l l l=−≤=−≤=−≤=+−−≤=+−−≤=+−−≤Optimized Design of Crank-rocker MechanismShao ChunxiangAbstract: T he crank and rocker mechanism is a relatively common form of transmission, which is widely used in many fi elds. According to the given geometrical dimensions of the crank, the paper studies the rocker mechanism, and optimizes the structure design.Key words:crank rocker mechanism, geometric dimensions, optimal design110AUTO TIMEAUTO TIME111AUTOMOBILE DESIGN | 汽车设计时代汽车 2)曲柄摇杆机构的传动角应在min γ和max γ之间,可得22223147max 2322223418min 23()()arccos()02()()arccos()02l l l l g x l l l l l l g x l l γγ+−+=−≤+−−=−≤计算时分别将1l 、4l 的数值代入即可,其中,2132,l x l x ==。

曲柄摇杆机构摇杆输出角的优化设计姓名:朱朝钰班级:机械本143学号:2014211212指导老师:马齐江二0一七年四月目录一、问题描述 (3)二、优化分析 (3)1.约束提取 (3)2.目标函数 (4)3.标准形式 (5)三、优化求解 (6)四、结论 (7)一、问题描述作业:设计曲柄摇杆机构。
要求:曲柄从0ϕ转到20πϕ+时,摇杆的输出角最优地实现一个给定的运动规律;()()πϕϕψϕψ3200-+==--f 曲柄与机架共线位置时的转角满足:︒≥︒≤45,135min max γγ图1二、优化分析1.约束提取a.杆长条件:最长杆与最短杆之和小于等于其他两杆之和{}0,,m ax 21432432≤+---l l l l l l lb.曲柄机构存在条件:任意三杆长之和必须大于另一杆长{}0,,,m ax 214324321<----l l l l l l l lc.曲柄摇杆条件:曲柄最短10132≤-≤-l ld.传动角⎪⎪⎩⎪⎪⎨⎧︒≤-+=+-+=︒≥-+=--+=1352362)(arccos 452162)(arccos322322322142322max 322322322142322min l l l l l l l l l l r l l l l l l l l l l r 2.目标函数首先根据已知的运动规律与机构实际运动规律之间的最小偏差指标来建立目标函数:21)(min ∑=-⎪⎭⎫⎝⎛-=ni i i x F ψψ设置初始位置如下图图2其中:⎩⎨⎧︒=︒=→⎭⎬⎫==090350032ϕψl l 对于任意位置,如下图所示图3根据几何关系可得出一下公式:ii i ii i i i i i l l l ϕϕβϕϕαπϕαβπψcos 1026cos 5arccoscos 10262cos 1026arccos0;32223--=--+-=≤≤--= 3.标准形式目标函数:21)(min ∑=-⎪⎭⎫⎝⎛-=ni i i x F ψψ约束条件:{}{}⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧≤---=≤--+=≤---=≤---=≤-=≤-=====0414.1360414.116065,,,1max 2045,,max 2010151..32232263223225323243232332214211l l l l g l l l l g l l l l g l l l l g l g l g l h l h t s三、优化求解根据以上条件,使用Excel进行优化分析,得知结果如下。
曲柄摇杆机构设计方法曲柄摇杆机构设计方法1·引言曲柄摇杆机构是一种常用的机械传动机构,其将旋转运动转化为直线运动或者其他形式的运动,广泛应用于各种机械设备中。
本文介绍了曲柄摇杆机构的设计方法,包括设计原则、构造选择、受力分析等。
2·设计原则曲柄摇杆机构的设计需要遵循以下原则:2·1 功能需求:明确机构的功能需求,如转速、载荷、行程等。
2·2 空间限制:考虑机构的整体尺寸、布局,以满足设备的安装和使用要求。
2·3 运动平稳性:通过合理的几何参数设计,使得曲柄摇杆机构运动平稳,减小振动和冲击。
2·4 功率损失:通过合理的材料选择和润滑方式设计,减小机械传动过程中的能量损失。
2·5 制造和装配:考虑机构的可制造性和可装配性,选择适合的加工工艺和装配工艺。
3·构造选择曲柄摇杆机构的构造选择包括曲柄类型、摇杆类型和连接方式。
3·1 曲柄类型:根据实际需求选择合适的曲柄类型,如直线型曲柄、圆弧型曲柄等。
3·2 摇杆类型:根据运动要求和空间限制选择合适的摇杆类型,如单摇杆、双摇杆等。
3·3 连接方式:根据构造要求选择合适的连接方式,如销轴连接、铆接连接等。
4·受力分析曲柄摇杆机构的受力分析是设计的重要环节,包括静态受力分析和动态受力分析。
4·1 静态受力分析:通过受力平衡条件,分析曲柄摇杆机构各部件的受力情况,确保各部件强度不超过材料的承载能力。
4·2 动态受力分析:根据机构运动过程中的惯性力、离心力等,分析曲柄摇杆机构的动态受力情况,确保机构运动平稳和安全。
5·参数设计曲柄摇杆机构的参数设计包括曲柄长度、摇杆长度、曲柄角度等。
5·1 曲柄长度:根据机构要求和受力分析结果,确定合适的曲柄长度,以满足运动要求和载荷要求。
5·2 摇杆长度:根据机构要求和受力分析结果,确定合适的摇杆长度,以满足运动要求和载荷要求。
优化设计-曲柄摇杆机构优化设计1. 引言曲柄摇杆机构被广泛应用于机械工程中,它具有转换旋转运动为往复直线运动的功能。
随着技术的发展,对曲柄摇杆机构的性能要求也越来越高。
为了满足这些要求,需要对曲柄摇杆机构进行优化设计,以提高其工作效率、减小体积和降低功耗。
本文将通过优化设计的方法,对曲柄摇杆机构进行改进,以期达到更好的性能。
2. 优化目标优化设计的目标是在保持曲柄摇杆机构原有功能的基础上,提高其工作效率、减小体积和降低功耗。
具体目标如下:1. 提高工作效率:通过优化设计,减小摩擦阻力和能量损失,提高能量传递效率。
2. 减小体积:通过优化结构,减小曲柄摇杆机构的整体体积,使其更适用于空间有限的应用场景。
3. 降低功耗:通过优化设计,减小机构的运动阻力,达到减少功耗的效果。
3. 优化方法为了实现上述优化目标,可以采用以下方法:优化材料选择:选择适合曲柄摇杆机构的高强度、低摩擦系数的材料,减小摩擦阻力和能量损失。
优化结构设计:通过对曲柄摇杆机构的结构进行改进,减小机构的摩擦面积和摩擦阻力,提高运动效率。
优化润滑方式:采用适当的润滑方式,减小曲柄摇杆机构的摩擦和磨损,以达到降低功耗的效果。
优化运动轨迹:通过对曲柄摇杆机构的运动轨迹进行优化设计,减小运动阻力和摩擦损失,提高能量传递效率。
优化配合间隙:适当调整曲柄摇杆机构的配合间隙,减小摩擦和磨损,提高工作效率。
4. 优化设计实施方案基于以上优化方法,可以实施以下具体的优化设计方案:1. 材料选择:选择高强度、低摩擦系数的材料,如高强度钢材和涂有低摩擦涂层的表面。
2. 结构设计:减小曲柄摇杆机构的摩擦面积,采用滚动轴承等减小摩擦阻力的结构设计。
3. 润滑方式:采用润滑油或固体润滑剂等适当的润滑方式,减小摩擦和磨损。
4. 运动轨迹优化:分析曲柄摇杆机构的运动特点,优化运动轨迹,减小摩擦阻力和能量损失。
5. 配合间隙优化:通过调整曲柄摇杆机构的配合间隙,减小摩擦和磨损,提高工作效率。
优化设计-曲柄摇杆机构优化设计优化设计-曲柄摇杆机构优化设计引言曲柄摇杆机构是一种常见的工程设备,常用于转换旋转运动为往复运动。
在实际应用中,为了提高机构的性能和效率,需要进行优化设计。
本文将详细介绍曲柄摇杆机构的优化设计方法和步骤。
1. 优化设计的背景和目标曲柄摇杆机构在工程应用中具有广泛的应用,例如内燃机、泵浦系统、机械手和纺织机械等。
在实际应用中,曲柄摇杆机构存在一些问题,例如能量损失、噪音和振动等。
进行优化设计,以改善机构的性能和效率,是非常必要和重要的。
2. 优化设计的方法和步骤2.1. 问题分析和需求定义,需要对已有的曲柄摇杆机构进行问题分析,确定需要改进的性能指标和需求。
例如,可以考虑降低摇杆机构的能耗、减少振动、提高工作效率和稳定性等。
2.2. 理论分析和模拟仿真在优化设计的初期阶段,可以使用理论分析和模拟仿真的方法,对曲柄摇杆机构进行分析和评估。
通过建立模型,计算和模拟机构的运动学和动力学特性,可以快速评估不同设计参数对机构性能的影响。
2.3. 设计参数的选择和优化根据理论分析和模拟仿真的结果,可以选择关键的设计参数进行优化。
例如,可以考虑曲柄长度、连杆长度和转动角度等。
通过改变这些参数的值,可以对机构的性能进行改善。
2.4. 结构改进和优化在选择和优化设计参数的基础上,可以对曲柄摇杆机构的结构进行改进和优化。
例如,可以改变曲柄和连杆的形状和材料,以提高机构的刚度和耐久性。
还可以考虑添加减振装置和降噪措施等。
2.5. 实验验证和性能评估完成结构改进和优化后,需要进行实验验证和性能评估。
通过在实际工作环境中和评估机构的性能和效果,可以验证优化设计的有效性和可行性。
根据实验结果,可以进一步优化设计,以达到最佳性能。
3. 优化设计的挑战和注意事项在进行曲柄摇杆机构的优化设计时,需要注意以下挑战和注意事项:- 保持设计的可靠性和稳定性,避免引入新的故障点。
- 在优化设计中,需要考虑材料成本、制造成本和可维护性等因素。
课程作业曲柄摇杆优化设计姓名:仇引生学号:2012105330班级:20121053三峡大学机械与动力学院目录摘要 (1)一、曲柄摇杆机构优化题目 (1)二、曲柄摇杆机构优化的问题分析 (1)三、曲柄摇杆机构的优化设计 (2)(一)最小传动角的确定 (2)(二)设计变量的确定 (2)(三)建立目标函数 (3)(四)约束条件 (4)四、运用MATLAB进行优化问题的解决 (4)1、目标函数程序的建立 (3)2、约束函数程序的建立 (5)3、运行的主程序 (5)4、运行结果 (6)5、运行程序中错误问题的解决 (6)五、对MATLAB运行的结果进行分析 (7)六、小结 (8)参考文献 (9)附录 (10)摘要:最后把MATLAB 关键字:的函数关系:0ψψ+=式中0ϕ和0ψ045,即:≥[min γγ以适当预选机架杆的长度,现取45l =。
二、曲柄摇杆机构优化的问题分析:根据题目及设计要求可归纳为以下三点:(1)满足预定的运动规律要求;(2)满足预定的各个杆的长度要求;(3)满足预定的轨迹要求。
如果在问题(1)里利用期望函数的思想来设计的话,那么就要求曲柄摇杆机构的曲柄与摇杆转角之间要按()fφϕ=(期望函数)的关系实现运动,但是因为机构的待定参数比较少,所以就不能准确的实现该期望函数,则必须设定实际的函数为()F φϕ=,而该函数与期望函数是不一致的,因此在设计时应使机构的实际函数()F φϕ=尽可能逼近所要求的期望函数()fφϕ=。
这时就需要按机械优化设计方法来设计曲柄连杆,建立优化数学模型,研究并提出其优化求解算法,并应用于优化模型的求解,求解得到更优的设计参数。
三、曲柄摇杆机构的优化设计:在图 2 所示的曲柄摇杆机构中,1l 、2l 、3l 、 4l 分别是曲柄AB 、连杆BC 、摇杆CD 和机架AD 的长度。
这里规定0ϕ为摇杆在右极限位置0φ时的曲柄起始位置角,它们由1l 、2l 、3l 和4l 确定。
基于MATLAB的曲柄摇杆机构的机械优化设计以曲柄摇杆机构为例,建立了运动分析数学模型。
以曲柄摇杆机构对应位置实际输出值与期望函数值的平方偏差之和的最小值作为实际目标进行优化。
应用MATLAB软件进行了优化设计和仿真分析,为机构优化设计提供了一种高效、直观的仿真手段,提高了对平面四连杆机构的分析设计能力。
标签:MATLAB;曲柄摇杆机构;优化设计前言平面四连杆机构虽然结构简单,但能有效地实现给定的运动规律或运动轨迹,很好地完成预定的动作,因而在工程实践中得到了广泛应用[1]。
传统的设计方法主要是图解法或分析法,对连杆机构设计,无论设计精度还是设计效率都相对低下,不能满足现代机械高速高精度的要求。
随着计算机技术的不断发展,为机构运用运动仿真实现优化设计提供了有效的手段。
MATLAB是一套功能强大的科学计算软件[2],被广泛应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
其具有强大的数值计算能力和高效的工具箱函数,高效求解复杂庞大的实际工程问题,并可以根据需要,实现计算结果的可视化效果。
首先构建四连杆机构的数学模型,再利用MATLAB 软件强大的数值计算能力和高效的工具箱函数,以某规定期望函数的平面四连杆机构(机构运动简图如图1 所示)为例进行优化设计并进行了仿真计算,实现了机构运动仿真的可视化。
1 曲柄摇杆机构的数学模型1.1 设计变量机构的基本变量为各杆杆长及曲柄转角,根据曲柄摇杆机构各杆长度间的关系,独立的杆长变量有三个,分别为L2,L3,L4取杆长L1=1。
故曲柄摇杆机构的设计变量可以表示为:1.2 目标函数1.3 约束条件该机构的约束条件有两个方面:一是最小传动角约束条件[3];二是保证四杆机构满足曲柄存在的条件。
(1)最小传动角约束或对应的约束函数为:(2)曲柄存在的条件按曲柄存在条件,由机械原理可知:2 结果比较文章的算例是四连杆机构的一个经典案例,常被研究四连杆机构的学者进行引用,但是很多人研究的都是已知曲柄和机架的参数优化设计,而把机架也作为未知量求解的程序较少,也就是研究的多是两参数的问题,一般把曲柄设置为1,机架设置为5,然后编程进行优化,结果如表1。
优化设计-曲柄摇杆机构优化设计
[文档标题]
[摘要]
本文档旨在对曲柄摇杆机构进行优化设计,提高其性能和效率。
文档详细介绍了曲柄摇杆机构的原理和结构,分析了优化设计的必要性和目标,展示了具体的优化方案和实施过程。
通过本文档的阅读,读者将对曲柄摇杆机构的优化设计有一个深入的了解,并能够根据实际需求进行相应的设计和改进。
[目录]
1.引言
1.1 研究背景
1.2 研究目的
1.3 研究内容
2.曲柄摇杆机构原理和结构
2.1 曲柄摇杆机构的定义
2.2 曲柄摇杆机构的工作原理
2.3 曲柄摇杆机构的结构组成
3.优化设计的必要性
3.1 现有曲柄摇杆机构存在的问题
3.2 优化设计的目标
4.优化设计方案
4.1 参数分析和优化目标的确定
4.2 设计方案的制定
4.3 仿真分析和评估
5.优化设计的实施过程
5.1 实施步骤和流程
5.2 设计实验和数据分析
5.3 结果和效果评估
6.结论
6.1 实施结果总结
6.2 存在的问题和进一步改进方向[附件]
- 附件1:曲柄摇杆机构优化设计报告- 附件2:仿真分析数据表格
- 附件3:设计实验原始数据
[法律名词及注释]
1.专利法:指国家对某项新的技术或技术方案所给予的一种专
门的权利保护。
2.商标法:指用于表示特定商品来源的某种标志的法律规定和
制度。
3.著作权法:指对于某种独立的创作作品,其作者取得的权利。
4.侵权:指在未取得相应权利人同意的情况下,侵犯他人在专利、商标、著作权等方面的合法权益的行为。
[全文结束]。
课程作业曲柄摇杆优化设计:宋*学号:2012138229班级:20121057三峡大学机械与动力学院目录1.曲柄摇杆机构优化设计题目要求 (1)2.课题描述 (2)3.数学模型的建立 (3)3.1设计变量的确定 (3)3.2约束条件的建立 (3)3.3目标函数的建立 (6)4.数学模型的建立 (8)5.用matlab优化计算程序及分析讨论 (8)5.1讨论及结果分析 (9)5.2.程序代码过程 (11)6.参考文献 (10)小结 (12)1. 0(3πψψ+=式中0ϕ和0ψ得小于45 ≥[min γγl 1=1l 4 =5。
2.在曲柄输入角从0ϕ到20πϕ+的过程中,使摇杆输出角尽量满足一个给定的函数)(0ϕf 即公式(1)。
对此我将0ϕ到20πϕ+等分为m 分,当然输出角也将对应的分为m 分,然后我将输出角对应的数值与期望函数进行拟合,如果误差降到最小,那么得到的结果将会是优化的解,这是将连续型函数转化为离散型的问题,利用matalab 编程计算,从而求解。
运动模型如图(1)所示图(1)曲柄摇杆机构运动模型图3.数学模型的建立3.1设计变量的确定定义:设计变量是除设计常数之外的基本参数,在优化设计过程中不断地进行修改、调整、一直处于变化的状态,这些基本参数都叫做设计变量。
对于本课题,设计常量为21,l l 长度,分别为1和5。
决定机构部分杆长尺寸32,l l ,以及摇杆按照已知运动规律开始运动时曲柄所处的位置角0ϕ应该列为设计变量即为 X=[]Tx x x 321=[]Tl l 032ϕ由于整个机构的杆长都是按比例来设计的,他们都是1的倍数,按照题目要求曲柄的初始位置为极位角,即0ϕ。
则可以根据曲柄摇杆机构各杆长度关系得到0ϕ和相应的摇杆3l 位置角0ψ的函数,关系式为⎥⎦⎤⎢⎣⎡+-++=42123242210)(2)(arccos l l l l l l l ϕ (2)⎥⎦⎤⎢⎣⎡--+=43232422102)(arccos l l l l l l ψ (3)由已知条件可知21,l l 长度分别为1和5,而根据公式(2)(3)可知,0ϕ0ψ 是由32,l l 的长度来决定,所以32,l l 为独立变量,则可以确定本课题的设计变量 X=[][]TTl l x x 3221=,这是一个二维优化问题。
3.2约束条件的建立定义:如果一个设计满足所有对它提出的要求,成为可行设计;一个可行设计必须满足某些设计限制条件,这些限制条件做为约束条件。
对本题分析可知机构要满足两个约束条件即①杆长条件满足曲柄摇杆机构存在条件②传动角满足最小传动角大于45度︒=≥45][min γγ(1)杆长条件满足曲柄摇杆机构存在条件则有a.最短杆与最长杆长度之和应小于或等于其余两杆之和b.连架杆与机架中至少有一杆是最短杆当最短杆为曲柄时即满足曲柄摇杆存在条件,得到以下约束条件00)(121≤-=≥=x l x g (4)00)(232≤-=≥=x l x g (5)060)(2132413≤--=≤--+=x x l l l l x g (6) 040)(2143124≤--=≤--+=x x l l l l x g (7) 040)(1242135≤--=≤--+=x x l l l l x g (8)(1)传动角满足最小传动角大于45度︒=≥45][min γγ(注:以本机构为例,传动角为32,l l 之间所夹的锐角;机械原理,西工大版) ①当曲柄在),0[π时,如图(2)所示图(2)左极限最小传动角示意图相应的传动角约束条件为[]02)(arccos 180)(32241232206≤-+-+-=γl l l l l l x g (9)②当曲柄在]2,(ππ区间上运动时,相应的传动角约束条件为,如图(3)图(3)右极限最小传动角示意图[]02)(arccos )(3221423227≤⎥⎦⎤⎢⎣⎡--+-=l l l l l l x g γ (10)这是一个具有2个设计变量,7个不等式约束条件的优化设计问题,可以选用约束优化方程成语来计算。
3.3目标函数的建立定义:满足所有约束条件的设计方案是可行设计方案,优化设计的任务就是要对各个设计方案进行比较,从而找出那个最佳的设计方案。
而对设计方案进行优劣比较的标准就是目标函数,或称为评价指标、评价函数。
针对本课题,目标函数可根据已知的运动规律和机构实际运动规律之间的偏差最小作为指标来建立,即取机构的期望输出角)(00ϕψf =和实际输出角)(0ϕψi i f =的平方误差积分最小作为目标函数,表达式为ϕψψπϕϕd i Ei 22)(00-⎰+,而这时一个连续型函数,为了方便计算,我们将这个问题转化为离散型的问题。
把输入角度ϕ取m 个点进行数值计算,它可以化约(4)表达式最小来求解。
2121)(),()(i mi Ei x x f x f ψψ-==∑= (11)Ei ψ--------期望输出角,Ei ψ=)(i E ϕψ;m--------输入角的等分数;i ψ-------实际输出角,由公式(1)可知;由曲柄的运动情况,可以分成三种运动模型,一种是在曲柄在机架之上运动,另一种是曲柄在机架下面运动,最后一种是二者都满足。
我将分别对此讨论,写出相应的目标函数并分析前两种结果对最终结果的影响。
(1)当πϕ≤≤i 0时,如图(4)图(4)曲柄在πϕ≤≤i 0区间模型图实际输出角为i i i βαπψ--= )0(πϕ≤≤i (12)⎥⎦⎤⎢⎣⎡-+=⎥⎦⎤⎢⎣⎡-+=221223222322arccos 2arccos x x x l l l i i i i i ρρρρα (13)⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡-+=i i i i i l l l ρρρρβ1024arccos 2arccos 2421242 (14)i i i l l l l ϕϕρcos 1026cos 2412421-=-+= (15)由于我们将2~00πϕϕ+等分为m 分,则实际的输入角i ϕ可以用函数表示出来为mi i 20πϕϕ+= 这里我将输出角的等分数设置成30,则 可以表示出实际输入角的函数为600πϕϕi i += (16)(2)当πϕπ2≤≤i 时,如图(5)图(5)曲柄在πϕπ2≤≤i 区间运动模型图实际输出角为i i i βαπψ+-= )2[πϕπ≤≤i (17)i i i i ϕρβα,,,表达式如(13)(14)(15)(16)所示。
(3)当(1)(2)两种情况都综合考虑进去时,则应该表示为⎩⎨⎧≤≤+-=≤≤--=)2[)0[πϕπβαπψπϕβαπψi i i ii i i i (18) i i i i ϕρβα,,,表达式如(13)(14)(15)(16)所示。
4.数学模型的建立通过上面的分析后,将输入角分成 30 等分(m=30),经过转化为标准形式得到曲柄摇杆机构优化设计标准数学模型为目标函数:min )(),()(2121→-==∑=i mi Ei x x f x f ψψ设计变量:[][]TTl l x x 3221=约束条件:见公式(4)(5)(6)(7)(8)(9)(10)机械优化设计中的问题,大多数属于约束优化问题,此为非线性约束优化问题,运用 MATLAB 优化工具箱的命令函数 fmincon 来处理有约束的非线性多元函数最小化优化问题。
5.用matlab 优化计算程序及分析讨论5.1讨论及结果分析(1)当曲柄在πϕ≤≤i 0运动时猜想 1.由于曲柄的实际输出角i ψ的围不完整,会使)0(πϕ≤≤i 结果拉长到整个π2区间,从而产生较大偏差。
连杆机构实现函数优化设计最优解 连杆相对长度a=4.1286 摇杆相对长度b=2.3226输出角平方误差之和f*=0.0076 最优点的性能约束函数值最小BCD 夹角约束函数值g1*=-7.1214 最大BCD 夹角约束函数值g2*=-0.0000图(6)当)0(πϕ≤≤i 时迭代拟合图结论:通过对比第三种情况,发现二者结果相同,猜想不成立。
(2)当曲柄πϕπ2≤≤i 运动时猜想 2.由于第一种情况下得到的结论对第三种没有影响,可以猜测在区间)2[πϕπ≤≤i 不存在,或者和第三种结果一样。
结论:Matlab 显示结果运行错误。
则可以说,第二种情况是不存在的,对结果不产生影响。
(3)当(1)(2)两种情况都综合考虑进去时 连杆机构实现函数优化设计最优解 连杆相对长度a=4.1286 摇杆相对长度b=2.3226输出角平方误差之和f*=0.0076最优点的性能约束函数值最小BCD 夹角约束函数值g1*=-7.1214 最大BCD 夹角约束函数值g2*=-0.0000图(7)πϕ20≤≤i 时迭代你拟合图将连杆长度带入计算,则可以得到传动角的变化规律图(8)传动角随输入角变化的规律图结论:经过matlab 优化的曲线跟期望曲线存在细微的差别,输出角平方误差之和f*=0.0076 ,传动角波动围符合要求,所以此优化方程的解符合要求。
5.2.程序代码过程(1)优化设计主程序M文件clc;clear;% 铰链四杆机构实现函数的优化设计的主程序% 调用目标函数optimfun和非线性约束函数confunx0 = [6;4]; %设计变量的初始值qb = 1;jj = 5;% 设计变量的下界与上界lb = [1;1];ub = [];a = [-1 -1;1 -1;-1 1];b = [-6;4;4];% 使用多维约束优化命令fmincon[x,fn] = fmincon(optimfun,x0,a,b,[],[],lb,ub,confun);disp '连杆机构实现函数优化设计最优解'fprintf('连杆相对长度a=%3.4f \n',x(1))fprintf('摇杆相对长度b=%3.4f \n',x(2))fprintf('输出角平方误差之和f*=%3.4f \n',fn)% 计算最优点x*的性能约束函数值g = confun(x);disp '最优点的性能约束函数值'fprintf('最小BCD夹角约束函数值g1*=%3.4f\n',g(1))%fprintf('最大BCD夹角约束函数值g2*=%3.4f\n',g(2))(2)调用目标函数及画图function f=optimfun(x)s=30;qb=1;jj=5;fx=0;fa0=acos(((qb+x(1))^2-x(2)^2+jj^2)/(2*(qb+x(1))*jj));%曲柄初始角pu0=acos(((qb+x(1))^2-x(2)^2-jj^2)/(2*x(2)*jj));%摇杆初始角for i=1:sfai=fa0+0.5*pi*i/s;pu(i)=pu0+2*(fai-fa0)^2/(3*pi);%摇杆期望角ri=sqrt(qb^2+jj^2-2*qb*jj*cos(fai));alfi=acos((ri^2+x(2)^2-x(1)^2)/(2*ri*x(2)));bati=acos((ri^2+jj^2-qb^2)/(2*ri*jj));if fai>0 & fai<=pips(i)=pi-alfi-bati;%elseif fai>pi & fai<=2pi%ps(i)=pi-alfi+bati;endfx=fx+(pu(i)-ps(i))^2;endi=1:30;f=fx;%输出角平分误差之和plot(i,ps(i),'r-.',i,pu(i),'b-*');legend('期望曲线','实际曲线');grid on(3)调用约束条件function [c,ceq]=confun(x)qb=1;jj=5;m=45*pi/180;n=135*pi/180;%c(1)=x(1)^2+x(2)^2-(jj-qb)^2-2*x(1)*x(2)*cos(m);%最小BCD夹角传动角约束c(2)=-x(1)^2-x(2)^2+(jj+qb)^2+2*x(1)*x(2)*cos(n);%最大BCD夹角约束ceq=[];(4)传动角与输入角关系代码%曲柄摇杆机构运动过程中传动角变化曲线图源代码l2=4.0483 ;l3=2.6550;l4=5;a1=acos(((1+l2)^2+l4^2-l3^2)/(2*l4*(1+l2)));a2=pi-acos((l3^2+l4^2-(1+l2)^2)/(2*l4*l3));for i=1:360;fai(i)=a1+(pi/2)*(i/360);rou(i)=sqrt(1+l4^2-2*l4*cos(fai(i)));if rad2deg(acos((l2^2+l3^2-rou(i)^2)/(2*l2*l3)))<=90CDJ(i)=acos((l2^2+l3^2-rou(i)^2)/(2*l2*l3));elseCDJ(i)=pi-acos((l2^2+l3^2-rou(i)^2)/(2*l2*l3));endendx=fai;y=CDJ;plot(x,y)xlabel('曲柄输入角/rad','fontsize',12,'fontname','宋体');ylabel('传动角/rad','fontsize',12,'fontname','宋体');title('给定区间的传动角变化曲线图','fontsize',12,'fontname','宋体');grid on6.参考文献【1】机械原理第七版;西北工业大学机械原理及机械零件教研室编;主编桓做模文杰【2】机械优化设计;工业大学靖民主编7.小结通过对《工程优化与matlab实现》的学习,我初步了解了matlab软件的的使用方法,接触了相关的规准则及设计方法,最主要的,我学习了一种新的思维方式,对我产生了不小的影响。