基于MATLAB的曲柄摇杆机构的机械优化设计
- 格式:doc
- 大小:24.00 KB
- 文档页数:3
利用MATLAB求解机械设计优化问题的分析周婷婷(能源与动力学院,油气0701>摘要:MATLAB是目前国际上最流行的科学与工程计算的软件工具,它具有强大的数值分析、矩阵运算、信号处理、图形显示、模拟仿真和最优化设计等功能。
本文浅谈MATLAB在机械设计优化问题的几点应用。
关键词:MATLAB 约束条件机械设计优化引言:在线性规划和非线性规划等领域经常遇到求函数极值等最优化问题,当函数或约束条件复杂到一定程度时就无法求解,而只能求助于极值分析算法,如果借助计算器进行手工计算的话,计算量会很大,如果要求遇到求解极值问题的每个人都去用BASIC,C和FORTRAN之类的高级语言编写一套程序的话,那是非一朝一日可以解决的,但如用MATLAB语言实现极值问题的数值解算,就可以避免计算量过大和编程难的两大难题,可以轻松高效地得到极值问题的数值解,而且可以达到足够的精度。
1无约束条件的极值问题的解算方法设有Rosenbrock函数如下:f(X1,X2>=100(X2-X1*X1>2+(1-X1>2求向量X取何值时,F(x>的值最小及最小值是多少?先用MATLAB语言的编辑器编写求解该问题的程序如下:%把函数写成MATLAB语言表达式fun=’100*(X(2>-X(1>*X(1>2+(1-X(1>>2%猜自变量的初值X0=[-1 2]。
%所有选项取默认值options=[ ];%调用最优化函数进行计算。
%函数最小值存放在数组元素options(8>中%与极值点对应的自变量值存放在向量X里%计算步数存放在数组元素options(10>中[X,options]=fmins(fun,X0,options>;%显示与极值点对应的自变向量X的值。
%显示函数最小值options(8>%显示函数计算步数options(10>把上面这段程序保存为m文件,然后用“Tools”菜单中的“Run”命令行这段程序,就可以轻松的得到如下结果:X=9.999908938395383e-0019.99982742178110e-001ans=1.706171071794760e-001ans=195显然,计算结果与理论结果的误差小到e-10级,这里调用了MATLAB的最优化函数fmins(>,它采用Nelder-Mead的单纯形算法,就是因为这个函数的采用,使最小值问题的解算变得非常简单。
课程设计报告班级:机0801姓名:徐勤秀学号:081101225指导老师:边义祥日期:2012.2.17基于MATLAB算法的机械优化设计摘要:将MA TLAB算法应用于机械优化设计,提出了MATLAB算法的优化原理及其数学模型的建立,给出求解方法,最后结合实例,求解机械优化设计的最优化问题。
关键词:MATLAB;优化设计;非线性约束最小化1.概论自MathWorks公司1984年推出MA TLAB以来,历经20多年的发展和竞争,MATLAB 语言就成为最具吸引力、应用最为广泛的数值科学计算语言。
随着其功能的不断完善,可以说,MATLAB已成为集数值计算功能、符号计算功能和计算可视化为一身的强大的科学计算语言。
本文运用MA TLAB6.5的优化工具求解机械工程设计中的最优化问题。
在国民经济各部门和科学技术的各个领域中普遍存在着最优化问题,最优化问题就是从所有可能的方案中选择出最合理的、达到最优目标的方案,即最优方案,搜索最优方案的方法就是最优化方法。
将MATLAB运用于最优化方法,使得机械优化设计更趋于科学性,同时MATLAB不用编写复杂的运算程序和各种难于掌握的优化算法,而且通俗易学,从而使优化问题更通俗化。
MATLAB的最优化技术主要包括以下两个方面的内容:(1)建立数学模型。
即用数学方法来描述最优化问题。
模型中的数学关系反映了最优化问题所要达到的目标和各种约束条件。
(2)数学求解。
数学模型建好以后,选择合理的优化方法进行求解。
2.MA TLAB优化算法的几何描述由于机械优化设计多数是非线性约束最小优化问题,通常要将问题转换为更简单的子问题,这些子问题可以求解并作为迭代过程的基础。
早期的方法通常是通过构造惩罚函数等来将有约束的最优化问题转换为无约束最优化问题进行求解。
现在,这些方法已经被更有效的基于K-T(Kuhh-Tucker)方程解的方法所取代。
K-T方程是有约束最优化问题求解的必要条件,是非线性规划算法的基础,这些算法直接计算拉格朗日乘子,通过拟牛顿法更新过程,给K-T方程积累二阶信息,可以保证有约束拟牛顿法的线性收敛。
基于MATLAB 工具箱的机械优化设计长江大学机械1:程学院机械11005班刘刚 摘 要:机械优化设计是一种非常重要的现代设计方法,能从众多的设计方案中 找出最佳方案,从而大大提高设计效率和质量。
本文系统介绍了机械优化设计的 研究内容及常规数学模型建立的方法,同时本文通过应用实例列举出了 MATLAB 在工程上的应用。
关键词:机械优化设计;应用实例:MATLAB 工具箱;优化目标优化设计是20世纪60年代随计算机技术发展起来的一门新学科,是构成和 推进现代设计方法产生与发展的重要内容。
机械优化设计是综合性和实用性都很 强的理论和技术,为机械设计提供了一种可靠、高效的科学设计方法,使设计者 由被动地分析、校核进入主动设计,能节约原材料,降低成本,缩短设计周期, 提高设计效率和水平,提升企业竞争力、经济效益与社会效益。
国内外相关学者 和科研人员对优化设计理论方法及其应用研究十分觅视,并开展了大最工作, 其基本理论和求解手段己逐渐成熟。
国内优化设计起步较晚,但在众多学者和科研人员的不懈努力下,机械优 化设计发展迅猛,在理论上和工程应用中都取得了很大进步和丰硕成果,但与 国外先进优化技术相比还存在一定差距,在实际工程中发挥效益的优化设计方 案或设计结果所占比例不大。
计算机等辅助设备性能的提高、科技与市场的双重 驱动,使得优化技术在机械设计和制造中的应用得到了长足发展,遗传算法、神 经网络、粒子群法等智能优化方法也在优化设计中得到了成功应用。
目前,优化 设计已成为航空航天、汽午制造等很多行业生产过程的一个必须且至关重要的环 节。
一、机械优化设计研究内容概述机械优化设计是一种现代、科学的设计方法,集思考、绘图、计算、实验于 一体,其结果不仅“可行”,而且“最优S 该“最优”是相对的,随着科技的 发展以及设计条件的改变,最优标准也将发生变化。
优化设计反映了人们对客观 世界认识的深化,要求人们根据事物的客观规律,在一定的物质基和技术条件 下充分发挥人的主观能动性,得出最优的设计方案a优化设计的思想是最优设计,利用数学手段建立满足设计要求优化模型, 方法是优化方法,使方案参数沿着方案更好的方向自动调整,以从众多可行设 计方案中选出最优方案,手段是计算机,计算机运算速度极快,能够从大量方 案中选出“最优方案“。
机械优化设计MATLAB程序1.引言本文档旨在提供机械优化设计的MATLAB程序的详细说明。
机械优化设计是通过数学建模和优化算法,对机械结构进行优化设计,以达到设计要求和最佳性能。
MATLAB是一种强大的数学建模和仿真软件,可用于机械优化设计。
2.前期准备2.1 问题定义在机械优化设计中,首先需要明确问题的定义,包括设计要求、约束条件等。
对于每个具体的机械结构,需要明确其目标函数和设计变量。
2.2 建立数学模型在机械优化设计中,需要建立数学模型来描述机械结构的性能和约束条件。
数学模型可以是线性或非线性的,根据具体问题选择适当的模型。
3.优化算法选择根据机械优化设计的特点,选择适合的优化算法进行优化。
常用的优化算法有遗传算法、粒子群优化算法、模拟退火算法等。
4.MATLAB程序设计4.1 数据处理在进行机械优化设计时,需要对输入数据进行处理,包括导入数据、数据清洗和预处理等。
4.2 模型建立根据前期准备中建立的数学模型,使用MATLAB进行模型建立,其中包括目标函数和约束条件的定义。
4.3 优化算法应用根据选择的优化算法,使用MATLAB进行优化算法的应用。
需要注意的是,在应用优化算法之前,需要初始化优化算法的参数。
4.4 结果分析对优化结果进行分析和评估,包括目标函数的值、约束条件的满足程度等。
5.结果展示将优化结果用图表的形式展示出来,直观地描述机械结构的性能和优化效果。
6.结论根据优化结果和分析,对机械优化设计的效果进行总结和评价。
7.附件本文档涉及的附件包括:MATLAB程序代码、数据文件、结果输出文件等。
这些附件可以提供详细的参考和复现。
8.法律名词及注释在本文档中涉及的法律名词及其注释如下:1)版权:指对作品享有的权益,包括复制、发行、展示等权利。
2)专利:指对某种发明或技术的独占权,由国家授予。
3)商标:指用于标识某个商品或服务来源的标识,可以是名称、图形等。
4)知识产权:指人们在创造新的发明、设计、文学艺术作品等过程中所创造的财产权益。
机械优化设计MATLAB程序
1.建立目标函数和约束条件
在机械优化设计中,目标函数是需要最小化或最大化的量,可以是机械结构的重量、成本、应力等。
约束条件是指机械结构必须满足的条件,例如最大应力、最小挠度等。
在MATLAB中通过函数来定义目标函数和约束函数。
2.选择优化算法
MATLAB提供了多种优化算法,例如遗传算法、粒子群算法、模拟退火算法等。
根据实际情况选择合适的优化算法。
3.设计参数和变量范围
机械结构的优化设计通常涉及到多个参数和变量,如尺寸、材料等。
在MATLAB中通过定义参数和变量范围来限制优化过程中的空间。
4.编写优化程序
在MATLAB中,可以使用优化工具箱的相关函数来编写机械优化设计程序。
程序的基本结构包括定义目标函数、约束函数、参数和变量范围,并选择合适的优化算法进行求解。
5.运行优化程序
在编写完成程序后,可以通过运行程序来开始优化过程。
MATLAB会根据设定的目标函数和约束条件进行,并最终得到最优解。
6.分析优化结果
优化程序运行完成后,可以通过MATLAB提供的分析工具对优化结果进行评估。
可以通过绘制图表、计算相关指标等方式对结果进行分析和比较。
7.进一步优化和改进
根据优化结果,可以对机械结构进行进一步优化和改进。
可以调整参数和变量范围,重新运行优化程序,直到得到满意的结果。
总之,以上是一种用MATLAB编写机械优化设计程序的基本流程。
通过合理地利用MATLAB提供的工具和函数,可以帮助工程师进行机械结构的优化设计,提高设计效率和准确性。

曲柄连杆机构matlab课程设计一、课程目标知识目标:1. 理解曲柄连杆机构的基本原理与运动特性;2. 掌握利用MATLAB软件进行曲柄连杆机构的运动仿真与分析;3. 学会结合实际工程案例,运用所学知识解决曲柄连杆机构的相关问题。
技能目标:1. 能够运用MATLAB软件构建曲柄连杆机构的模型;2. 能够对曲柄连杆机构进行运动分析,并绘制出相应的运动轨迹图;3. 能够根据分析结果,优化曲柄连杆机构的结构参数。
情感态度价值观目标:1. 培养学生对机械原理及MATLAB软件的兴趣,激发学习热情;2. 培养学生严谨的科学态度,注重理论与实践相结合;3. 增强学生的团队协作意识,提高沟通与表达能力。
本课程针对高年级学生,结合学科特点,注重理论知识与实践技能的结合。
通过本课程的学习,使学生能够掌握曲柄连杆机构的基本原理,运用MATLAB软件进行运动仿真与分析,培养解决实际工程问题的能力。
同时,课程强调团队合作,提升学生的综合素质,为将来的学术研究和职业发展打下坚实基础。
二、教学内容1. 曲柄连杆机构基本原理:介绍曲柄连杆机构的类型、特点及其在工程中的应用,重点讲解其运动学及动力学原理。
教材章节:第二章 曲柄连杆机构2. MATLAB软件操作:讲解MATLAB软件的基本操作,包括界面、常用命令、数据类型等,为后续运动仿真打下基础。
教材章节:第一章 MATLAB基础3. 曲柄连杆机构建模与仿真:教授如何使用MATLAB软件构建曲柄连杆机构的模型,进行运动仿真,分析运动特性。
教材章节:第三章 曲柄连杆机构建模与仿真4. 结构参数优化:介绍曲柄连杆机构结构参数对运动性能的影响,教授如何运用MATLAB软件进行参数优化。
教材章节:第四章 曲柄连杆机构优化设计5. 实际工程案例:分析典型曲柄连杆机构在实际工程中的应用,结合MATLAB软件进行案例分析,提高学生解决实际问题的能力。
教材章节:第五章 曲柄连杆机构工程应用案例教学内容安排与进度:共分为五个阶段,每个阶段2学时,共计10学时。
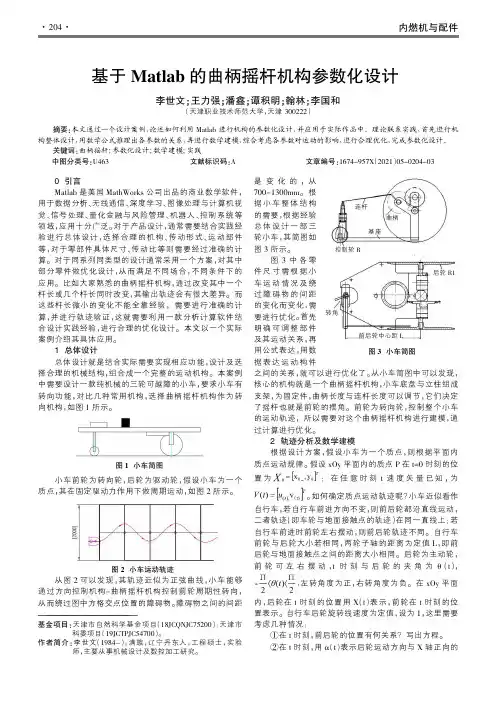
小车前轮为转向轮,后轮为驱动轮,假设小车为一个其在固定驱动力作用下做周期运动,如图从图2可以发现,其轨迹近似为正弦曲线,小车能够通过方向控制机构-曲柄摇杆机构控制前轮周期性转向,从而绕过图中方格交点位置的障碍物。
障碍物之间的间距就可以进行优化了。
从小车简图中可以发现,核心的机构就是一个曲柄摇杆机构,小车底盘与立柱组成曲柄长度与连杆长度可以调节,它们决定了摇杆也就是前轮的摆角。
前轮为转向轮,控制整个小车的运动轨迹,所以需要对这个曲柄摇杆机构进行建模,通质点运动规律。
假设为;。
如何确定质点运动轨迹呢?自行车,若自行车前进方向不变,二者轨迹(即车轮与地面接触点的轨迹)自行车前进时前轮左右摆动,前轮可左右左转角度为正,内,后轮在t 时刻的位置用置表示。
自行车后轮旋转线速度为定值,考虑几种情况:——————————————————基金项目:天津市自然科学基金项目(18JCQNJC75200);天津市图1小车简图图2小车运动轨迹图3小车简图控制轮R基座连杆曲柄后轮R1转角前后轮中心距L才能用点,向,有关。
这样得到一个几何位置关系:其中L表示前后轮之间的距离,这是由自行车决定的,令表示后轮与前轮的方则有姿势关系:表示后轮在s时,前轮的偏转角,左转为式(2)两方程就能决定车轮的运动轨迹。
用角度表示方向,β(s)表示后轮的角度,θ(s)表示前轮相则前轮角度β+θ,基本微分方程:后轮速度前轮速度,为单位向量其中,)再求导,得即求得至此可得轮转角,W=W1/(2.52·R1),控制轮转3参数化设计根据求得的参数表达式,编写程序,用Matlab通过运行程序,可以绘制出小车运动轨迹图形,结合实际运动情况,综合考虑振幅的大小选择300-400mm,幅过大,可以有效躲避中间的障碍物,但能量相同的情况下,绕过的障碍物就会减少。
同理,振幅减小,绕过障碍物会增加,但会更容易撞到障碍物,所以也要结合实际经验合理优化。
仿真运动轨迹如图5所示。
Matlab在机械设计中的应⽤⼤作业Matlab在机械设计中的应⽤⼤作业1、试⽤解析综合法设计⼀个曲柄摇杆机构。
已知机构⾏程速度变化系数 1.25k=,摇杆CD的长度3250mml=,摆⾓30ψ=,要求机构的最⼩传动⾓minγ≥40。
确定曲柄摇杆机构各构件杆长调⽤函数的编制:function f=funct(x)k=1.25;theta=pi*(k-1)/(k+1);yg=250;pis=pi/6gamin=2*pi/9f1=(x(2)+x(1))^2+(x(2)-x(1))^2-2*(x(2)+x(1))*(x(2)-x(1))*cos(theta)-(2*yg*sin(pis/2))^2; f2=yg^2+x(3)^2-2*yg*x(3)*cos(x(4))-(x(2)-x(1))^2;f3=yg^2 +x(3)^2-2*yg*x(3)*cos(x(4)+pis)-(x(2)+x(1))^2;f4=yg^2+x(2)^2-2*yg*x(2)*cos(gamin)-(x(3)-x(1))^2;f=[f1;f2;f3;f4];主函数:>> x0=[50 120 200 0.5];>> k=1.25;>> theta=pi*(k-1)/(k+1);>> yg=250;>> gamin=2*pi/9;>> x=fsolve(@funct,x0)求解结果:Equation solved.fsolve completed because the vector of funct values is near zeroas measured by the default value of the funct tolerance, andthe problem appears regular as measured by the gradient.x =62.9934 105.9045 245.0702 0.17242、四连杆机构如图1 所⽰,已知各构件的尺⼨L1, L2, L3, L4及原动件1的⾓位移θ1和等⾓速度ω1,求构件2和3的⾓位移θ 2 ,θ3,⾓速度ω2,ω3,⾓加速度ε2,ε3。
课程作业曲柄摇杆优化设计姓名:XX学号:XXXXX班级:XXXXXXX大学机械与动力学院目录1摘要2问题研究2.1问题重述2.2问题分析3数学模型的建立3.1设计变量的确定3.2目标函数的建立3.3约束条件的确定3.4标准数学模型4使用MATLAB编程求解4.1调用功能函数4.2首先编写目标函数M 文件4.3编写非线性约束函数 M 文件4.4编写非线性约束函数 M 文件confun.m4.5运行结果5结果分析6结论推广7过程反思8个人小结9参考文献1摘要: ab 确,22.10(32πψψ+=式中0ϕ和0ψ得小于4=≥][min γγ另外,2.2 要求摇杆的输出角最优地实现一个给定的运动规律()f ϕ。
这里假设要求:()()20023E f φϕφϕϕπ==+- (1)图1 曲柄摇杆机构简图对于这样的设计问题,可以取机构的期望输出角()E f φϕ=和实际输出角()F φϕ=的平方误差之和作为目标函数,使得它的值达到最小。
在图 1 所示的曲柄摇杆机构中,1l 、2l 、3l 、 4l 分别是曲柄AB 、连杆BC 、摇杆CD 和机架AD 的长度。
这里规定0ϕ为摇杆在右极限位置0φ时的曲柄起始位置角,它们由1l 、2l 、3l 和4l 确定。
3数学模型的建立 3.1 设计变量的确定决定机构尺寸的各杆长度1l 、2l 、3l 和4l ,以及当摇杆按已知运动规律开始运行时,曲柄所处的位置角0ϕ应列为设计变量,所有设计变量有:[][]1234512340T Tx x x x x x l l l l ϕ== (2)考虑到机构的杆长按比例变化时,不会改变其运动规律,通常设定曲柄长度1l =1.0,在这里可给定4l =5.0,其他杆长则按比例取为1l 的倍数。
若取曲柄的初始位置角为极位角,则ϕ及相应的摇杆l 位置角φ均为杆长的函数,其关系式为:()()()()2222212432301242125arccos 2101l l l l l l l l l l ϕ⎡⎤⎡⎤++-+-+==⎢⎥⎢⎥++⎢⎥⎢⎥⎣⎦⎣⎦ (3)()()222221243230343125arccos 210l l l l l l l l l φ⎡⎤⎡⎤+--+--==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(4)因此,只有2l 、3l 为独立变量,则设计变量为[][]1223T Tx x x l l ==。
机械优化设计MATLAB程序正文:⒈前言⑴研究背景机械优化设计是一种在机械工程领域中被广泛应用的方法,旨在通过使用数学模型和优化算法来改进机械系统的性能。
MATLAB是一种强大的数值计算和编程工具,可以用于开发机械优化设计程序。
⑵目的和范围⒉问题描述⑴设计需求在开始编写机械优化设计程序之前,需要明确设计需求,即需要实现的机械系统的性能指标或目标。
这些需求可以包括系统的功率、效率、噪声、振动等方面。
⑵优化目标根据设计需求,确定最终优化目标。
例如,通过调整机械系统的参数来最大化系统的效率、最小化系统的振动等。
⒊数学模型⑴设计变量设计变量是机械系统中可以调整的参数。
需要对设计变量进行定义和范围设定,以确保优化算法能够在合理的范围内搜索最优解。
⑵约束条件约束条件是在进行优化时必须满足的条件。
这些条件可以包括设计变量的边界条件、约束函数等。
在编写MATLAB程序时,需要将这些约束条件作为输入参数。
⒋算法选择与实现⑴优化算法选择根据优化目标和系统的特点,选择合适的优化算法。
常见的优化算法包括遗传算法、粒子群优化算法、模拟退火算法等。
⑵优化算法实现根据选择的优化算法,编写MATLAB程序实现优化过程。
程序应包括目标函数的定义、算法的参数设置、迭代过程和终止条件等。
⒌算法验证与结果分析⑴数据采集与处理在进行机械优化设计实验时,需要采集相应的实验数据,并对数据进行处理。
这些数据可以包括设计变量的调整情况、系统性能指标的变化等。
⑵结果分析基于采集到的数据,分析和比较不同优化算法的性能。
可以绘制图表展示优化过程和结果的变化,以便于进一步分析和优化。
⒍结论与展望总结机械优化设计MATLAB程序的设计过程和结果,对实验结果进行分析,并提出未来改进和研究的方向。
1、本文档涉及附件:附件1:MATLAB程序代码示例附件2:数据采集记录表2、本文所涉及的法律名词及注释:机械优化设计:指利用数学模型和优化算法改善机械系统性能的方法。
机械优化设计在matlab中的应用东南大学机械工程学院**一优化设计目的:在生活和工作中,人们对于同一个问题往往会提出多个解决方案,并通过各方面的论证从中提取最佳方案。
最优化方法就是专门研究如何从多个方案中科学合理地提取出最佳方案的科学。
由于优化问题无所不在,目前最优化方法的应用和研究已经深入到了生产和科研的各个领域,如土木工程、机械工程、化学工程、运输调度、生产控制、经济规划、经济管理等,并取得了显著的经济效益和社会效益。
二优化设计步骤:1.机械优化设计的全过程一般可以分为如下几个步骤:1)建立优化设计的数学模型;2)选择适当的优化方法;3)编写计算机程序;4)准备必要的初始数据并伤及计算;5)对计算机求得的结果进行必要的分析。
其中建立优化设计数学模型是首要的和关键的一步,它是取得正确结果的前提。
优化方法的选取取决于数学模型的特点,例如优化问题规模的大小,目标函数和约束函数的性态以及计算精度等。
在比较各种可供选用的优化方法时,需要考虑的一个重要因素是计算机执行这些程序所花费的时间和费用,也即计算效率。
2.建立数学模型的基本原则与步骤设计变量的确定;设计变量是指在优化设计的过程中,不断进行修改,调整,一直处于变化的参数称为设计变量。
设计变量的全体实际上是一组变量,可用一个列向量表示:x=。
目标函数的建立;选择目标函数是整个优化设计过程中最重要的决策之一。
当对某以设计性能有特定的要求,而这个要求有很难满足时,则针对这一性能进行优化会得到满意的效果。
目标函数是设计变量的函数,是一项设计所追求的指标的数学反映,因此它能够用来评价设计的优劣。
目标函数的一般表达式为:f(x)=,要根据实际的设计要求来设计目标函数。
约束条件的确定。
一个可行性设计必须满足某些设计限制条件,这些限制条件称为约束条件,简称约束。
由若干个约束条件构成目标函数的可行域,而可行域内的所有设计点都是满足设计要求的,一般情况下,其设计可行域可表示为在可行域中,任意设计点满足全部约束条件,称为可行解,但不是最优解,而优化设计就是要求出目标函数在可行域的最优解。
·制造业信息化·Vol.22.,200922009机电产品开发与创新Development &Innovation of M achinery &E lectrical P roducts3,No.1Jan .,2010第23卷第1期2010年1月收稿日期:2009-11-06作者简介:李建霞,女,河南信阳人,教授。
主要从事计算机辅助设计教学与研究工作。
已发表核心期刊论文20余篇;王良才,男,山东济南人,副教授。
主要从事机械设计教学与研究工作。
已发表核心期刊论文10余篇。
0引言Matlab 语言是一种非常强大的工程计算语言,提供了非常丰富的Matlab 优化工具箱。
其优化工具箱有许多常用的优化算法,广泛应用于线性规划、二次规划、非线性优化、最小二乘法问题、非线性方程求解、多目标决策等问题,其函数表达简洁,优化算法选择灵活,参数设置自由,相比于其它很多成熟的优化程序具有明显的优越性。
机械优化设计是在现代机械设计理论发展基础上产生的一种新的设计方法,在机械零部件设计中取得了广泛的应用。
机械优化设计是在进行某种机械产品设计时,根据规定的约束条件,优选设计参数,使某项或几项设计指标获得最优值。
在进行优化设计时,首先要建立工程设计问题的数学模型,然后按照数学模型的特点选择优化方法及其计算程序,求得最优设计方案。
1四杆机构优化设计的数学模型四杆机构是机械传动的重要组成部分。
设计四杆机构通常使用作图法与实验法,这两种方法简单易行,但误差较大,运用解析法,能获得所要求的精度,然而用人工进行,整个设计过程是一项繁琐、冗长的工作,甚至可能无法实现。
采用Matlab 优化工具箱对四杆机构进行优化设计,不仅参数输入简单,而且编程工作量小,可更快捷准确地达到设计要求。
四杆机构种类很多,这里只以曲柄摇杆机构为例说明四杆机构优化设计方法。
Matlab 优化工具箱是一套功能强大的工程计算软件,集数值计算、符号运算、可视化建模、仿真和图形处理等多种功能于一体,被广泛应用于机械设计、自动控制和数理统计等工程领域。
利用MATLAB求解机械设计优化问题的分析周婷婷(能源与动力学院,油气0701)摘要:MATLAB是目前国际上最流行的科学与工程计算的软件工具, 它具有强大的数值分析、矩阵运算、信号处理、图形显示、模拟仿真和最优化设计等功能。
本文浅谈MATLAB在机械设计优化问题的几点应用。
关键词:MATLAB 约束条件机械设计优化引言:在线性规划和非线性规划等领域经常遇到求函数极值等最优化问题,当函数或约束条件复杂到一定程度时就无法求解,而只能求助于极值分析算法,如果借助计算器进行手工计算的话,计算量会很大,如果要求遇到求解极值问题的每个人都去用BASIC,C和FORTRAN之类的高级语言编写一套程序的话,那是非一朝一日可以解决的,但如用MATLAB语言实现极值问题的数值解算,就可以避免计算量过大和编程难的两大难题,可以轻松高效地得到极值问题的数值解,而且可以达到足够的精度。
1无约束条件的极值问题的解算方法设有Rosenbrock函数如下:f(X1,X2)=100(X2-X1*X1)2+(1-X1)2求向量X取何值时,F(x)的值最小及最小值是多少?先用MATLAB语言的编辑器编写求解该问题的程序如下:%把函数写成MATLAB语言表达式fun=’100*(X(2)-X(1)*X(1)2+(1-X(1))2%猜自变量的初值X0=[-1 2]; %所有选项取默认值options=[ ];%调用最优化函数进行计算。
%函数最小值存放在数组元素options(8)中%与极值点对应的自变量值存放在向量X里%计算步数存放在数组元素options(10)中[X,options]=fmins(fun,X0,options);%显示与极值点对应的自变向量X的值。
%显示函数最小值options(8)%显示函数计算步数options(10)把上面这段程序保存为m文件,然后用“Tools”菜单中的“Run”命令行这段程序,就可以轻松的得到如下结果:X=9.999908938395383e-0019.99982742178110e-001ans=1.706171071794760e-001ans=195显然,计算结果与理论结果的误差小到e-10级,这里调用了MATLAB的最优化函数fmins(),它采用Nelder-Mead的单纯形算法,就是因为这个函数的采用,使最小值问题的解算变得非常简单。
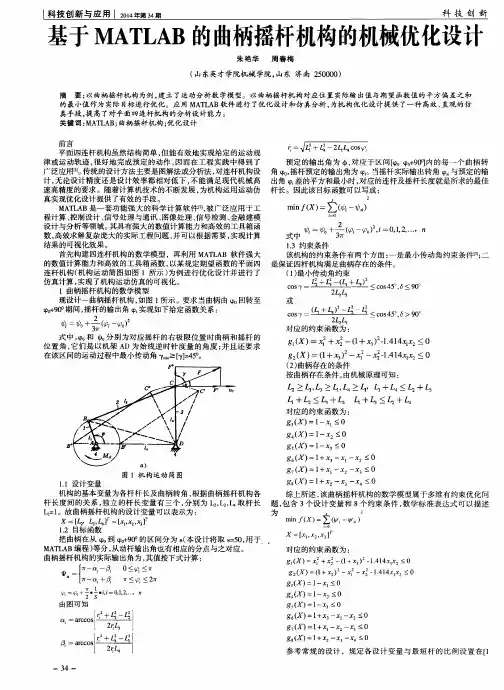
基于MATLAB的曲柄摇杆机构的机械优化设计
以曲柄摇杆机构为例,建立了运动分析数学模型。
以曲柄摇杆机构对应位置实际输出值与期望函数值的平方偏差之和的最小值作为实际目标进行优化。
应用MATLAB软件进行了优化设计和仿真分析,为机构优化设计提供了一种高效、直观的仿真手段,提高了对平面四连杆机构的分析设计能力。
标签:MATLAB;曲柄摇杆机构;优化设计
前言
平面四连杆机构虽然结构简单,但能有效地实现给定的运动规律或运动轨迹,很好地完成预定的动作,因而在工程实践中得到了广泛应用[1]。
传统的设计方法主要是图解法或分析法,对连杆机构设计,无论设计精度还是设计效率都相对低下,不能满足现代机械高速高精度的要求。
随着计算机技术的不断发展,为机构运用运动仿真实现优化设计提供了有效的手段。
MATLAB是一套功能强大的科学计算软件[2],被广泛应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
其具有强大的数值计算能力和高效的工具箱函数,高效求解复杂庞大的实际工程问题,并可以根据需要,实现计算结果的可视化效果。
首先构建四连杆机构的数学模型,再利用MATLAB 软件强大的数值计算能力和高效的工具箱函数,以某规定期望函数的平面四连杆机构(机构运动简图如图1 所示)为例进行优化设计并进行了仿真计算,实现了机构运动仿真的可视化。
1 曲柄摇杆机构的数学模型
1.1 设计变量
机构的基本变量为各杆杆长及曲柄转角,根据曲柄摇杆机构各杆长度间的关系,独立的杆长变量有三个,分别为L2,L3,L4取杆长L1=1。
故曲柄摇杆机构的设计变量可以表示为:
1.2 目标函数
1.3 约束条件
该机构的约束条件有两个方面:一是最小传动角约束条件[3];二是保证四杆机构满足曲柄存在的条件。
(1)最小传动角约束
或
对应的约束函数为:
(2)曲柄存在的条件
按曲柄存在条件,由机械原理可知:
2 结果比较
文章的算例是四连杆机构的一个经典案例,常被研究四连杆机构的学者进行引用,但是很多人研究的都是已知曲柄和机架的参数优化设计,而把机架也作为未知量求解的程序较少,也就是研究的多是两参数的问题,一般把曲柄设置为1,机架设置为5,然后编程进行优化,结果如表1。
从表1中可以看出,文章采用的3参数优化设计,较两参数的优化设计,由于设置的比例大,得到的杆长较长一些,但是函数优化值还是比较满意的。
3 结束语
文章以曲柄摇杆连杆为例,建立了运动分析数学模型。
以曲柄摇杆连杆机构对应位置实际输出值与期望函数值的平方偏差之和的最小值作为实际目标进行优化。
利用MATLAB 优化计算工具箱实现了机构的优化设计和仿真分析,简单易行,不用编写繁琐的程序,减小了工作量,为机构优化设计提供了一种高效、直观的仿真手段,提高了对平面四连杆机构的分析设计能力。
同时,也为其他机构的仿真设计提供了借鉴。
参考文献
[1]崔利杰,等.基于MATLAB运动仿真的平面多连杆机构优化设计[J].机械设计与制造,2007(2):40-42.
[2]王沫然.MATLAB 与科学计算[M].北京:电子工业出版社,2005.
[3]张永恒,等.工程优化设计与MATLAB实现[M].北京:清华出版社,2011.
[4] 张鄂,买买提明.现代设计理论与方法[M].北京:科学出版社,2014.
[5]郭仁生,等.机械工程设计分析和MATLAB应用[M].北京:机械工业出版社,2011.
[6]王文娟.基于MATLAB优化工具箱的平面连杆机构的设计[J].轻工机械,2006(4):76-79.
[7]龚水明,詹小刚.基于MATLAB优化工具箱的机械优化设计[J].制造业信息化,2008(10):92-94.
作者简介:朱艳华(1983-),女,讲师,研究方向为CAD/CAM/CAE,工作单位:山东英才学院机械学院。