理论力学 多自由度体系的微振动共47页文档
- 格式:ppt
- 大小:4.11 MB
- 文档页数:47

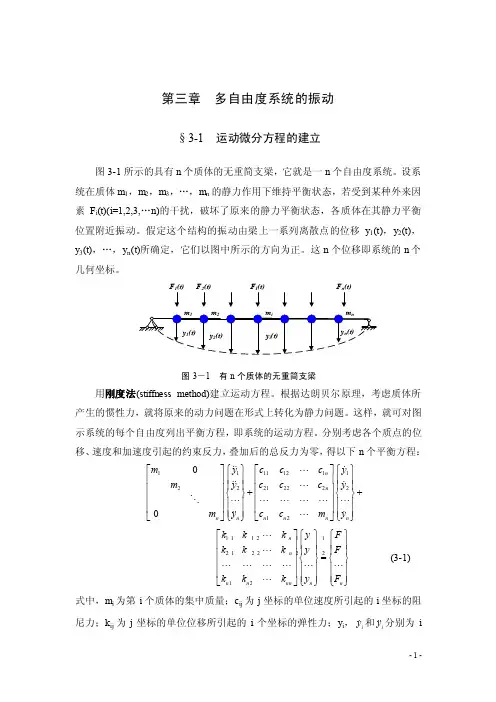
第三章 多自由度系统的振动§3-1 运动微分方程的建立图3-1所示的具有n 个质体的无重简支梁,它就是一n 个自由度系统。
设系统在质体m 1,m 2,m 3,…,m n 的静力作用下维持平衡状态,若受到某种外来因素F i (t)(i=1,2,3,…n)的干扰,破坏了原来的静力平衡状态,各质体在其静力平衡位置附近振动。
假定这个结构的振动由梁上一系列离散点的位移y 1(t),y 2(t),y 3(t),…,y n (t)所确定,它们以图中所示的方向为正。
这n 个位移即系统的n 个几何坐标。
图3-1 有n 个质体的无重简支梁用刚度法(stiffness method)建立运动方程。
根据达朗贝尔原理,考虑质体所产生的惯性力,就将原来的动力问题在形式上转化为静力问题。
这样,就可对图示系统的每个自由度列出平衡方程,即系统的运动方程。
分别考虑各个质点的位移、速度和加速度引起的约束反力,叠加后的总反力为零,得以下n 个平衡方程:111112112221222212n n n n n n n n m y c c c ym y c c c y m y c c m y⎡⎤⎧⎫⎡⎤⎧⎫⎢⎥⎪⎪⎢⎥⎪⎪⎪⎪⎪⎪⎢⎥⎢⎥++⎨⎬⎨⎬⎢⎥⎢⎥⎪⎪⎪⎪⎢⎥⎢⎥⎪⎪⎪⎪⎣⎦⎩⎭⎣⎦⎩⎭1112111212222212n n n n nn n n k kk y F k k k y F k k k y F ⎡⎤⎧⎫⎧⎫⎢⎥⎪⎪⎪⎪⎪⎪⎪⎪⎢⎥=⎨⎬⎨⎬⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎣⎦⎩⎭⎩⎭(3-1)式中,m i 为第i 个质体的集中质量;c ij 为j 坐标的单位速度所引起的i 坐标的阻尼力;k ij 为j 坐标的单位位移所引起的i 个坐标的弹性力;y i ,i y和i y 分别为i坐标的位移、速度和加速度。
式(3-1)可简写为MyCy Ky F ++= (3-2)式中,K ,M 和C 分别为系统的刚度矩阵、质量矩阵和阻尼矩阵,它们通称为系统的特性矩阵;y ,y 和y为位移、速度和加速度向量;F 为荷载向量。
第六章多自由体系的微振动一.多自由度体系线性自由振动的一般处理方法二.简正坐标三.寻找简正坐标的一般方法代入拉格朗日方程:特解为:代回微分方程:12;A A 有不为零的解:上述四个根,则有:代入拉格朗日方程:引入新坐标:;,削去了动能中的交叉项,应用拉格朗日方程,可以表示成两个独立广义坐标的二阶微分方程:应用()12;q q 比()12;x x 方便!()12;q q 称为简正坐标。
简正坐标的物理意义:(1) 如果体系的振动过程中只以一个频率振动,其余频率的振动没有激发,则反映这种振动模式的坐标称为简正坐标。
相应的振动模式称为简正振动,(2) 体系的任意一种状态都是各种不同简正振动的线性叠加。
2.寻找简正坐标的方法:通过坐标变化,使得:设:通过变换使得:;同时变为:;我们寻找C!先考虑势能:(用矩阵表示)例:(1)将势能写成矩阵形式:(2)求本征值方程:解得:对应于对角化变换矩阵为:则:用矩阵表示:其中:转换矩阵:代回到方程中:其中:我们的目的是使势能变成:这就要求D 是对角矩阵:其中:12,,n λλλ 称为矩阵B 的本征值,本征值方程为:矩阵 C 由 矩阵 B 的本征矢量 11,,n K K K组成:其中:通过上述变换,使得势能变成了平方和的形式,保持势能的平方和形式不变,再做一次变换使得动能也变成平方和形式:变换:取:动能和势能的系数矩阵:取:例:变换坐标:势能项已经是平方和形式了,取:代回到:则有:归一化解:由:得到:则:作业:1.P186 对于3个广义坐标的情况,求简正坐标。
2.阅读并理解P187 的6.5 节。
第六章多自由度体系的微振动教学目的和基本要求:正确理解线性振动的概念和力学体系平衡的分类;能运用拉格朗日方程初步分析两个自由度保守体系的自由振动问题;理解简正坐标的概念并了解利用简正坐标将复杂振动转化为简正振动的方法和意义。
教学重点:掌握运用拉格朗日方程分析两个自由度保守体系的自由振动问题的方法和简正坐标的物理意义。
教学难点:简正坐标的物理意义。
§6.1 振动的分类和线形振动的概念振动不仅在宏观领域大量存在(如单摆、弹性振子和地震等),在微观领域也是一种普遍现象(如晶体中晶格的振动、光学中分子的振动等)。
振动的种类根据所依据的标准不同可有几种分类方法,下面将简单介绍。
一:振动的分类1.按能量的转换来划分.自由振动——系统的能量E为常数,即能量守恒。
阻尼振动——系统的能量E逐渐转化为热能Q。
强迫振动——系统不断从外界吸收能量并将其转化为热能Q。
2.按体系的自由度划分.单自由度振动——体系的自由度S=1。
有限多自由度振动和无限多自由度振动——体系的自由度为大于1的有限值或无限大值。
3.按体系的动力学微分方程的种类划分.线性振动——体系的运动微分方程为线性方程。
非线性振动——体系的运动微分方程为非线性方程。
4.本章研究的主要问题.以上我们按不同的标准将振动进行了归类,实际上这几种标准是相互交叉的,也就是说振动还可以按照以上两个或三个标准进行进一步的归类。
如线性振动还可以进一步分为单自由度线性振动、有限多自由度线性振动和无限多自由度线性振动。
表6.1给出了同时按自由度和微分方程的种类对振动进行的分类。
我们在本章研究的主要问题是有限多自由度的线性振动,所以有必要对线性和非线性振动做进一步讨论。
表6.1二:有限多自由度线性振动1.定义:体系的自由度为有限多个且体系的运动微分方程为线性方程。
例如:单摆的运动微分方程为0=+θθsin lg ,方程为非线性的。
但当θ很小时有θθ≈sin ,方程变为线性方程0=+θθlg 。