同步发电机模型整理
- 格式:doc
- 大小:313.00 KB
- 文档页数:4

同步发电机机端故障计算的模型
同步发电机机端故障计算的模型是一种用于分析和预测同步发电机机端故障的数学模型。
它基于电力系统动态稳定性分析原理,考虑了发电机的电气特性和机械特性,并结合系统运行条件和故障类型进行计算。
这个模型通常由以下几个主要部分组成:
1. 发电机模型:它描述了发电机的电气特性,包括转子、定子和励磁系统的动态方程。
这些方程考虑了发电机的电流、电压、角度和功率等参数,以及励磁系统的反应。
2. 动力系统模型:它描述了整个电力系统的动态行为,包括发电机、输电线路、变压器和负载等组成部分。
这个模型考虑了系统的传输能力、阻尼特性和负荷响应等因素。
3. 故障模型:它描述了可能出现的不同类型的故障,如短路故障、开路故障和地故障等。
这个模型考虑了故障的位置、电流和电压等参数,并与发电机模型和动力系统模型进行耦合。
通过将这些模型组合在一起,并进行相应的数学求解和仿真计算,可以得到发电机机端故障发生时的电气和机械响应。
这些响应可以包括电流和电压的变化、发电机的转速和转矩的变化,以及系统的动态稳定性等指标。
这个模型的准确性和可靠性对于电力系统运行和安全具有重要意义,因此需要在实际应用中考虑各种不确定性因素,并进行模型验证和修
正。
同时,模型的计算效率和实时性也是需要关注的问题,以便及时发现和应对潜在的机端故障风险。
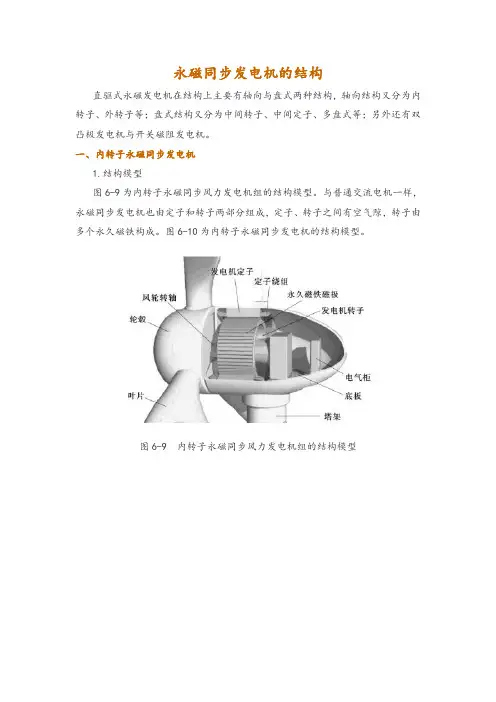
永磁同步发电机的结构直驱式永磁发电机在结构上主要有轴向与盘式两种结构,轴向结构又分为内转子、外转子等;盘式结构又分为中间转子、中间定子、多盘式等;另外还有双凸极发电机与开关磁阻发电机。
一、内转子永磁同步发电机1.结构模型图6-9为内转子永磁同步风力发电机组的结构模型。
与普通交流电机一样,永磁同步发电机也由定子和转子两部分组成,定子、转子之间有空气隙,转子由多个永久磁铁构成。
图6-10为内转子永磁同步发电机的结构模型。
图6-9 内转子永磁同步风力发电机组的结构模型图6-10 内转子永磁同步发电机的结构模型2.定子结构永磁同步发电机的定子铁芯通常由0.5mm厚的硅钢片制成以减小铁耗,上面冲有均匀分布的槽,槽内放置三相对称绕组。
定子槽形通常采用与永磁同步电动机相同的半闭口槽,如图6-11所示。
为有效削弱齿谐波电动势和齿槽转矩,通常采用定子斜槽。
定子绕组通常由圆铜线绕制而成,为减少输出电压中的谐波含量,大多采用双层短距和星形接法,小功率电机中也有采用单层绕组的,特殊场合也采用正弦绕组。
3.转子结构由于永磁同步发电机不需要起动绕组,转子结构比异步启动永磁同步电动机简单,有较充足的空间放置永磁体。
转子通常由转子铁芯和永磁体组成。
转子铁芯既可以由硅钢片叠压而成,也可以是整块钢加工而成。
根据永磁体放置位置的不同,将转子磁极结构分为表面式和内置式两种。
表面式转子结构的永磁体固定在转子铁芯表面,结构简单,易于制造。
内置式转子结构的永磁体位于转子铁芯内部,不直接面对空气隙,转子铁芯对永磁体有一定的保护作用,转子磁路的不对称产生磁阻转矩,相对于表面式结构可以产生更强的气隙磁场,有助于提高电机的过载能力和功率密度,但转子内部漏磁较大,需要采取一定的隔磁措施,转子结构和加工工艺复杂,且永磁体用量多。
图6-11 典型永磁同步发电机的结构示意图1—定子铁芯;2—定子槽;3—转子铁芯;4—永磁体;5—轴二、外转子永磁同步发电机1.外转子永磁同步风力发电机组外转子永磁同步风力发电机的发电绕组在内定子上,绕组与普通三相交流发电机类似;转子在定子外侧,由多个永久磁铁与外磁轭构成,外转子与风轮轮毂安装成一体,一同旋转。

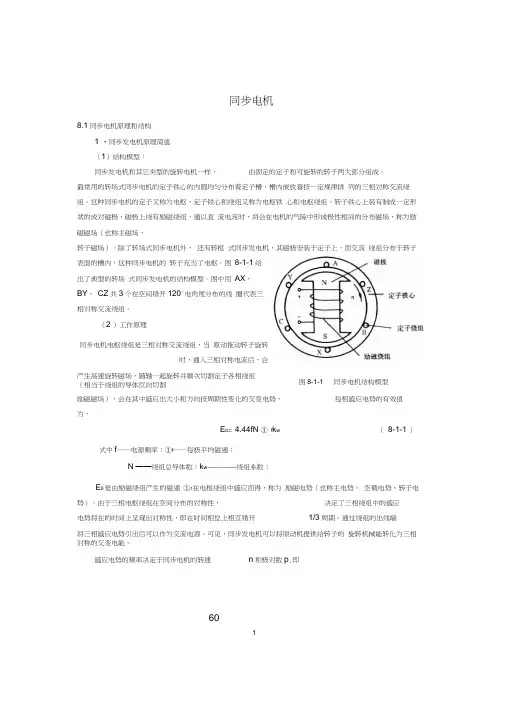
6018.1同步电机原理和结构1 •同步发电机原理简述(1)结构模型:同步发电机和其它类型的旋转电机一样, 由固定的定子和可旋转的转子两大部分组成。
最常用的转场式同步电机的定子铁心的内圆均匀分布着定子槽,槽内嵌放着按一定规律排 列的三相对称交流绕组。
这种同步电机的定子又称为电枢,定子铁心和绕组又称为电枢铁 心和电枢绕组。
转子铁心上装有制成一定形状的成对磁极,磁极上绕有励磁绕组,通以直 流电流时,将会在电机的气隙中形成极性相间的分布磁场,称为励磁磁场(也称主磁场、转子磁场)。
除了转场式同步电机外, 还有转枢 式同步发电机,其磁极安装于定子上,而交流 绕组分布于转子表面的槽内,这种同步电机的 转子充当了电枢。
图 8-1-1给出了典型的转场 式同步发电机的结构模型。
图中用 AX 、BY , CZ 共3个在空间错开120°电角度分布的线 圈代表三相对称交流绕组。
(2 )工作原理同步电机电枢绕组是三相对称交流绕组,当 原动拖动转子旋转时,通入三相对称电流后,会产生高速旋转磁场,随轴一起旋转并顺次切割定子各相绕组(相当于绕组的导体反向切割励磁磁场),会在其中感应出大小和方向按周期性变化的交变电势,每相感应电势的有效值为, E o = 4.44fN ① f k w( 8-1-1 )式中f ――电源频率;①f ――每极平均磁通; N ——绕组总导体数;k w ---------------- 绕组系数;E 0是由励磁绕组产生的磁通 ①f 在电枢绕组中感应而得,称为 励磁电势(也称主电势、 空载电势、转子电势)。
由于三相电枢绕组在空间分布的对称性,决定了三相绕组中的感应 电势将在的时间上呈现出对称性,即在时间相位上相互错开 1/3周期。
通过绕组的出线端将三相感应电势引出后可以作为交流电源。
可见,同步发电机可以将原动机提供给转子的 旋转机械能转化为三相对称的交变电能。
感应电势的频率决定于同步电机的转速 n 和极对数p ,即同步电机图8-1-1 同步电机结构模型2供电品质考虑,由众多同步发电机并联构成的交流电网的频率应该是一个不变的值, 这就要求发电机的频率应该和电网的频率一致。
2.1同步电机模型同步电机是电力系统的主要元件,电磁暂态和机电互动现象十分丰富,模型的建立和求解往往决定着仿真的精度和能够反映实际系统动态过程的程度,因此,很多专家在同步发电机建模方面展开研究并取得多项成果。
同步电机是励磁控制系统的控制对象,又和励磁控制系统密切相关系。
研究励磁系统的动态特性,离不开对同步电机动态特性的分析。
同步电机的过渡过程比较复杂,通过以d,q 坐标系统推导出来的派克(Park)方程作为同步电机的基本方程,求出完整的动态模型;在某些特定的条件下,可由完整的动态模型得到简化模型。
在小干扰情况下,可以将非线性的完整模型在工作点附近线性化,得出线性化模型:同样,在某些特定的条件下,还可以求得简化的线性模型。
同步电机dqO 坐标下的暂态方程称为派克方程,它是一组非线性的微分方 程组。
由于dqO 三轴之间的解耦以及aqO 坐标下的电感参数是常数,因此派克变换及同步电机的派克方程在实用分析中得到广泛的应用。
同步电机具有三个定子绕组、一个转子绕组、两个阻尼绕组。
六个绕组间 都有磁的耦合,加上转子位置不断变化,绕组间的耦合又必然是转子的位置函 数。
要正确反映上述情况就需要七个非线性微分方程。
2.1.1同步电机基本方程由同步电机在d,q 轴的park 微分方程组出发,电压和磁链方程(以标幺值形式)如(2.1)-(2.10)所示:电压方程: 定子绕组:d q d d ri p U --=ωψψ (2.1)q d q q ri p U --=ωψψ (2.2) 励磁绕组: f f f f p r i U ψ-= (2.3) 阻尼绕组: d d d p i r 1110ψ-= (2.4) q q q p i r 1110ψ-= (2.5)磁链方程: 定子绕组:d ad f ad d d d i X i X i X 1++-=ψ (2.6)q aq q q q i X i X 1+-=ψ (2.7) 励磁绕组:d ad f f d ad f i X i X i X 1++-=ψ (2.8)阻尼绕组:d d f ad d ad d i X i X i X 111++-=ψ (2.9)q q q aq q i X i X 111+-=ψ (2.10) 其中,dtd p θθω==。
同步发电机二阶四阶六阶实用模型
同步发电机的实用模型一般采用复数域中的二阶、四阶或六阶模型来描述其动态性能。
这些模型基于一组差分方程或微分方程,并包含主要的电气参数和动态特性。
二阶实用模型是较为简化的模型,主要包括发电机的发电机端电压动态特性和转子运动方程。
该模型常用于对发电机的短时间响应进行建模和分析。
四阶实用模型是在二阶模型基础上增加了电力系统不平衡和传输网络的考虑。
该模型适用于对发电机的长时间动态稳定性进行建模和分析。
六阶实用模型是在四阶模型基础上加入了励磁系统和稳压器等附属设备的考虑。
该模型适用于对发电机的电压和励磁系统动态特性进行建模和分析。
这些实用模型可以用于开展发电机的建模、仿真和控制策略研究,有助于提高电力系统的稳定性和可靠性。

2.1同步发电机数学模型及运行特性本节主要阐述同步发电机稳态数学模型及运行特性:包括向量图、等值电路与功率方程以及功角特性。
2.1.1 同步发电机稳态数学模型理想电机假设:1)电机铁心部分的导磁系数为常数;2)电机定子三相绕组完全对称,在空间上互差120度,转子在结构上对本身的直轴和交轴完全对称;3)定子电流在空气隙中产生正弦分布的磁势,转子绕组和定子绕组间的互感磁通也在空气隙中按正弦规率分布;4)定子及转子的槽和通风沟不影响定子及转子的电感,即认为电机的定子及转子具有光滑的表面。
同步电动机是一种交流电机,主要做发电机用,也可做电动机用,一般用于功率较大,转速不要求调节的生产机械,例如大型水泵,空压机和矿井通风机等。
近年由于永磁材料和电子技术的发展,微型同步电机得到越来越广泛的应用。
同步电动机的特点之一是稳定运行时的转速n与定子电流的频率f1之间有严格不变的关系,即同步电动机的转速n与旋转磁场的转速n0相同。
“同步”之名由此而来。
同步发电机是电力系统中的电源,它的稳态特性与暂态行为在电力系统中具有支配地位。
虽然在电机学中已经学过同步电机,但那时侧重于基本电磁关系,而现在则从系统运行的角度审视发电机组。
1.同步发电机的相量图设发电机以滞后功率因数运行,三相同步发电机正常运行时,定子某一相空载电势Eq,输出电压或端电压U和输出电流I间的相位关系如图2-1所示。
δ是Eq领先U的角度,称为功角,是功率因数角,即U与I的相位差, Eq与q轴(横轴或交轴)重合,d为纵轴或直轴。
U和I的d、q分量为:图 2-1电势电压相量图电机学课程中已经讨论过,端电压和电流的分量与Eq间的关系为:(2-3)式中,r为定子每相绕组的电阻,x d为定子纵轴同步电抗,x q为定子横轴同步电抗。
其中空载电势Eq与转子励磁绕组中的励磁电流成正比,其比例系数可从空载试验中得到。
为了便于绘制相量图,令d轴作正实轴,q轴作正虚轴,则各相量可表示为所以(2-7)对于隐极式同步发电机(汽轮发电机),因气隙均匀,直轴和交轴同步电抗相等(x d=x q),上式变为(2-8)此即表示隐极式同步发电机的方程,由此即可作出它的等值电路和相量图,如图2-2所示(a)等值电路(b)矢量图图2-2 隐极式同步发电机等值电路和矢量图凸极式同步发电机(水轮发电机),把电枢反应磁势分解为d轴及q轴两个分量,d轴电枢反应磁势的位置固定在转子d轴上,q轴电枢反应磁势的位置固定在转子q轴上,从而解决了合成磁势遇到的不同气隙宽度的困难。
2.1同步发电机数学模型及运行特性本节主要阐述同步发电机稳态数学模型及运行特性:包括向量图、等值电路与功率方程以及功角特性。
2.1.1 同步发电机稳态数学模型理想电机假设:1)电机铁心部分的导磁系数为常数;2)电机定子三相绕组完全对称,在空间上互差120度,转子在结构上对本身的直轴和交轴完全对称;3)定子电流在空气隙中产生正弦分布的磁势,转子绕组和定子绕组间的互感磁通也在空气隙中按正弦规率分布;4)定子及转子的槽和通风沟不影响定子及转子的电感,即认为电机的定子及转子具有光滑的表面。
同步电动机是一种交流电机,主要做发电机用,也可做电动机用,一般用于功率较大,转速不要求调节的生产机械,例如大型水泵,空压机和矿井通风机等。
近年由于永磁材料和电子技术的发展,微型同步电机得到越来越广泛的应用。
同步电动机的特点之一是稳定运行时的转速n与定子电流的频率f1之间有严格不变的关系,即同步电动机的转速n与旋转磁场的转速n0相同。
“同步”之名由此而来。
同步发电机是电力系统中的电源,它的稳态特性与暂态行为在电力系统中具有支配地位。
虽然在电机学中已经学过同步电机,但那时侧重于基本电磁关系,而现在则从系统运行的角度审视发电机组。
1.同步发电机的相量图设发电机以滞后功率因数运行,三相同步发电机正常运行时,定子某一相空载电势Eq,输出电压或端电压U和输出电流I间的相位关系如图2-1所示。
δ是Eq领先U的角度,称为功角,是功率因数角,即U与I的相位差, Eq与q轴(横轴或交轴)重合,d为纵轴或直轴。
U和I的d、q分量为:图 2-1电势电压相量图电机学课程中已经讨论过,端电压和电流的分量与Eq间的关系为:(2-3)式中,r为定子每相绕组的电阻,x d为定子纵轴同步电抗,x q为定子横轴同步电抗。
其中空载电势Eq与转子励磁绕组中的励磁电流成正比,其比例系数可从空载试验中得到。
为了便于绘制相量图,令d轴作正实轴,q轴作正虚轴,则各相量可表示为所以(2-7)对于隐极式同步发电机(汽轮发电机),因气隙均匀,直轴和交轴同步电抗相等(x d=x q),上式变为(2-8)此即表示隐极式同步发电机的方程,由此即可作出它的等值电路和相量图,如图2-2所示(a)等值电路(b)矢量图图2-2 隐极式同步发电机等值电路和矢量图凸极式同步发电机(水轮发电机),把电枢反应磁势分解为d轴及q轴两个分量,d轴电枢反应磁势的位置固定在转子d轴上,q轴电枢反应磁势的位置固定在转子q轴上,从而解决了合成磁势遇到的不同气隙宽度的困难。
同步电机定转子侧变量对应关系及名称
112
X ()q q 励磁电动势=i 空载电动势(后面的电动势)=瞬变电动势(后面的电动势)q 轴超瞬变电动势(后面的电动势)d 轴超瞬变电动势(后面的电动势)→→'''→=''''''→=+-''''''→=-→=-'→=-f
f f f ad f f d q ad f ad f q
d q f f ad D q d q D f f D f D ad
aq Q d d Q
Q q d aq g a q d u u E E X r E E X i X
ψE X E ψX X ψE X E X ψX ψX X X X ψE X E ψX i E X i X i E ⎧⎪⎪
⎪
⎪⎪⎪⎪
⎪
⎪
⎨⎪⎪⎪⎪
⎪
⎪⎪⎪⎪⎩
q g g ψX
同步发电机16各变量:
13个电磁变量:定子侧6个(dq u 、dq i 、dq ψ);转子侧7个(f u 、fDQ i 、fDQ ψ)
3个机电变量:(m T 、r ω、δ) 同步发电机10个基本方程(dqfDQ u 、dqfDQ ψ):
00=-+-⎧⎪
=-++⎪⎪=-+⎪⎪=-+⎪
=-+⎪⎨
=-++⎪⎪=-+⎪=-++⎪⎪
=-++⎪⎪=-+⎩d d d r q
q q q r d f
f f f
D D D Q Q Q
d
d d ad f ad D q
q q aq Q
f ad d f f ad D D ad d ad f D D Q
aq q Q Q u ri p ψωψu ri p ψωψu r i p ψ
r i p ψr i p ψψx i x i x i ψx i x i
ψx i x i x i ψx i x i x i ψx i x i
三阶实用模型:
这种模型的导出基于如下假定:
忽略定子绕组暂态和阻尼绕组作用,计及励磁绕组暂态和转子动态 (1)忽略定子d 、q 轴暂态,即定子电压方程中d p ψ、q p ψ均为0;
(2)在定子电压方程中,1(..)≈r ωp u ,在速度变化不大的过渡过程中,误差很小;
(3)忽略D 、Q 绕组,其作用可在转子运动方程中补入阻尼项近似考虑。
导出思路:
(1)派克方程中忽略D 、Q 绕组,方程数变为6个,变量数变为12个(dqf u 、dqf i 、dqf ψ、
m T 、r ω、δ),假设f u 和m T 为已知量(励磁绕组和原动机输入),变量减为10个,方程数
为6(dqf u 、dqf ψ)+2(r ω、δ)+2(dq 轴网络方程)=10个,可以求解。
(2)推导三阶模型时要对变量作如下改进:保留定子变量dq u 、dq i ,转子变量f u 、f i 、f
ψ用f E 、q E 、'q
E 代替,然后用3个磁链方程消去d ψ、q ψ、q E ,最终保留dq u 、dq i 、'q E 、r ω、δ(7未知)和f E 、m T (2已知)共9个变量,方程为3个电压方程、2个转子运动
方程和2个dq 轴网络方程。
三阶模型 状态量:('q E 、r ω、δ):
()(1)()1⎧⎪
=-⎪⎪
''=--⎪⎪'⎪'''=---⎨⎪
⎪'''⎡⎤+-=-=---⎪⎣⎦
⎪
⎪=-⎪⎩d q q d q q d d q
q
d f q d d d J m
e m q q d q d q u x i ri u E x i ri dE T E E x x i dt d ω
T D ωT T T E i x x i i dt d δωdt
若计及反映q 轴瞬变过程中的g 绕组的四阶模型 状态量('d E 、'q E 、r ω、δ):
00
()()(1)()1=-⎧⎪
''=--⎪⎪'
⎪'''=---⎪
⎪'
⎨'''=---⎪⎪⎪'''⎡⎤+-=-=---⎣⎦⎪⎪=-⎪⎩d q q d q q d d q
q d f q d d d
d q d q q q J m
e m q q d q d q u x i ri u E x i ri dE T E E x x i dt dE T E x x i dt d ωT D ωT T T E i x x i i dt d δ
ωdt
五阶模型:
导出思路:
方程数为10个,7个状态量(d 、q 、f 、D 、Q 、r ω、δ),忽略定子暂态,d p ψ、q p ψ均为0,降为5阶,变量数变为16个(dqf u 、dqfDQ i 、dqfDQ ψ、m T 、r ω、δ),假设f u 和m T 为已知量(励磁绕组和原动机输入),变量减为14个,通过方程数为10(dqfDQ u 、dqfDQ ψ)+2(r ω、δ)+2(dq 轴网络方程)=14个,可以求解。
求解时将dq u 、dq i 保留,f u 用f E 替代,用5个磁链方程消去3个转子电流i f (q E )、D i 、
Q i 和2个定子磁链d ψ、q ψ,f ψ、D ψ、Q ψ用'q
E 、''q E 、''d E 代替。
方程数为5(dqfDQ u )+2(r ω、δ)+2(dq 轴网络方程)=9个,变量为11个(9个未知dq u 、dq i 、'q E 、''q E 、''d E 、r ω、δ),可以求解。
方程为:
1101111
00
10
()()()()''''=+-''''=--'''''----''''=-+-'''---'''''-''''''''''=-+--'-'''''''=-+-d d
q q d
q
q d d q q d d d d d
d d f q q
d d d d q q d d d q q d d d d d
νq d q q q J u E x i ri u E x i ri
dE x x x x x x x x T E E E i dt x x x x x x dE dE x x T T E E x x i dt x x dt dE T E x x i dt d ω
T (1)()1⎧⎪
⎪⎪⎪⎪⎪⎪
⎪⎪⎨⎪
⎪⎪⎪
⎪''''''''⎡⎤+-=-=-+--⎪⎣⎦⎪
⎪=-⎪⎩m e m q q d d d q d q D ωT T T E i E i x x i i dt d δωdt
二阶模型:
经典二阶模型 状态量(r ω、δ):
对四阶模型,令0''==q
d pE pE ,即只计及转子动态,模型中''≠d q x x ,即仍计及暂态凸极
效应。
(1)()1''=+-⎧⎪
''=--⎪⎪⎨''''⎡⎤+-=-=-+--⎣⎦⎪⎪⎪=-⎩d d
q q d q q d d q
r J m e m q
q d d d q d q u E x i ri u E x i ri d ω
T D ωT T T E i E i x x i i dt
d δ
ωdt
'q
E 恒定模型
对于三阶实用模型,若设0'=q
pE ,并计及凸极效应, (1)()1=-⎧⎪
''=--⎪⎪⎨''⎡⎤+-=-=---⎣⎦⎪⎪=-⎪⎩d q q d q q d d q
J m e m q
q d q d q u x i ri u E x i ri d ω
T D ωT T T E i x x i i dt
d δ
ωdt。