同步发电机调速系统常见数学模型、需收集的参数
- 格式:docx
- 大小:148.09 KB
- 文档页数:8
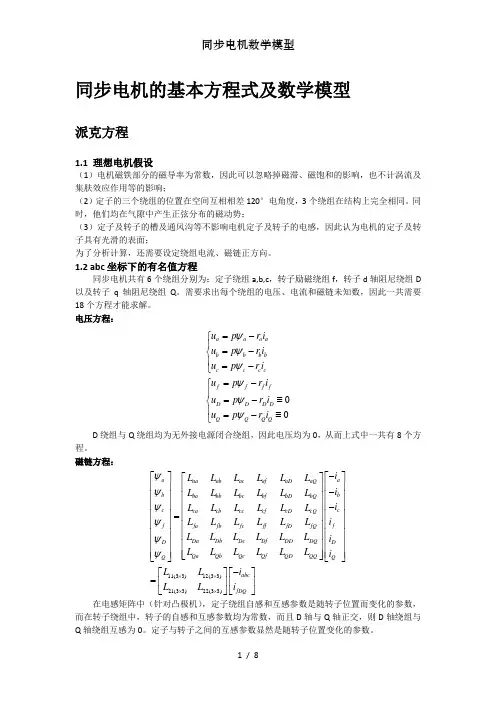
同步电机的基本方程式及数学模型派克方程1.1 理想电机假设(1)电机磁铁部分的磁导率为常数,因此可以忽略掉磁滞、磁饱和的影响,也不计涡流及集肤效应作用等的影响;(2)定子的三个绕组的位置在空间互相相差120°电角度,3个绕组在结构上完全相同。
同时,他们均在气隙中产生正弦分布的磁动势;(3)定子及转子的槽及通风沟等不影响电机定子及转子的电感,因此认为电机的定子及转子具有光滑的表面;为了分析计算,还需要设定绕组电流、磁链正方向。
1.2 abc 坐标下的有名值方程同步电机共有6个绕组分别为:定子绕组a,b,c ,转子励磁绕组f ,转子d 轴阻尼绕组D 以及转子q 轴阻尼绕组Q 。
需要求出每个绕组的电压、电流和磁链未知数,因此一共需要18个方程才能求解。
电压方程:00a a a ab b b b cc c c f f f f D D D D QQ Q Q u p r i u p r i u p r iu p r i u p r i u p r i ψψψψψψ=-⎧⎪=-⎨⎪=-⎩=-⎧⎪=-≡⎨⎪=-≡⎩D 绕组与Q 绕组均为无外接电源闭合绕组,因此电压均为0,从而上式中一共有8个方程。
磁链方程:11a a aa ab ac af aD aQ b b ba bb bc bf bD bQ c c ca cb cc cf cD cQ f f fa fb fc ff fD fQ Da Db Dc Df DD DQ D D Qa Qb Qc Qf QDQQ Q Q i L L L L L L i L L L L L L i L L L L L L i L L L L L L L L L L L L i L L L L L L i L ψψψψψψ-⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦=(33)12(33)21(33)22(33)abc fDQ i L L L i ⨯⨯⨯⨯-⎡⎤⎡⎤⎢⎥⎢⎥⎣⎦⎣⎦在电感矩阵中(针对凸极机),定子绕组自感和互感参数是随转子位置而变化的参数,而在转子绕组中,转子的自感和互感参数均为常数,而且D 轴与Q 轴正交,则D 轴绕组与Q 轴绕组互感为0。
![[精选]高等电力系统之同步电机数学模型资料1.doc](https://uimg.taocdn.com/fc4bd2daa0116c175f0e48ed.webp)
[精选]高等电力系统之同步电机数学模型--资料1上篇电力系统元件数学模型1 同步电机数学模型1.1 abc 坐标下的有名值方程1.1.1 理想电机同步电机是电力系统的心脏,它是一种集旋转与静止、电磁变化与机械运动于一体,实现电能与机械能变换的元件,其动态性能十分复杂,而且其动态性能又对全电力系统的动态性能有极大影响,因此应对它作深入分析,以便建立用于研究分析电力系统各种物理问题的同步电机数学模型。
为了建立同步电机的数学模型,必须对实际的三相同步电机作必要的假定,以便简化分析计算。
通常假定:(1)电机磁铁部分的磁导率为常数,既忽略掉磁滞、磁饱和的影响,也不计涡流及集肤作用等的影响。
(2)对纵轴及横轴而言,电机转子在结构上是完全对称的。
(3)定子的3个绕组的位置在空间互相相差120º电角度,3个绕组在结构上完全相同。
同时,它们均在气隙中产生正弦形分布的磁动势。
(4)定子及转子的槽及通风沟等不影响电机定子及转子的电感,即认为电机的定子及转子具有光滑的表面。
满足上述假定条件的电机称为理想电机。
这些假定在大多数情况下已能满足实际工程问题研究的需要,下面的同步电机基本方程推导即基于上述理想电机的假定。
当需要考虑某些因素(如磁饱和等)时,则要对基本方程作相应修正。
图1-l 是双极理想电机的示意图,图中标明了各绕组电磁量的正方向。
必须特别强调的是,后面导出的同步电机基本方程是与图1-l 中所定义的电磁量正方向相对应的。
下面对图1-1中所定义的各电磁量正方向作必要的说明。
定子abc 三相绕组的对称轴a ,b ,c 空间互差120º电角度。
设转子逆时针旋转为旋转正方向,则其依次与静止的a ,b ,c 三轴相遇。
定子三相绕组磁链c b a ΨΨΨ,,的正方向分别与a ,b ,c 三轴正方向一致。
定子三相电流c b a i i i ,,的正方向如图1-1所示。
正值相电流产生相应相的负值磁动势和磁链。
simulink同步电机调速数学模型
Simulink是一个用于建立和仿真动态系统的软件,可用于建立同步电机调速的数学模型。
具体来说,可以通过以下步骤建立同步电机调速的Simulink模型:
1.打开Simulink软件,新建一个模型。
2.在Simulink库中找到并添加所需的模块,例如:电压源模块、三相电抗器
模块、三相电压测量模块、三相电流测量模块、电机模块、调速器模块等。
3.根据同步电机调速系统的数学模型,配置各模块的参数和连接方式。
4.设置仿真时间、步长等参数,并进行仿真。
5.分析仿真结果,验证模型的正确性和有效性。
需要注意的是,同步电机调速的数学模型包括电机模块、调速器模块等部分,每个部分都有其特定的数学方程和参数。
因此,在建立Simulink模型时,需要仔细考虑各部分之间的关系和参数设置,以确保模型的正确性和有效性。
同步电机数学模型及参数研究综述同步电机是一种重要的电机类型,它的数学模型和参数研究对于了解同步电机的运行特性,提高同步电机的效率和性能具有重要意义。
本文综述了同步电机的数学模型及参数研究,内容涵盖了相关背景、工作原理、数学建模、模型参数确定、模型验证以及模型应用等方面。
1.相关背景来说,同步电机在电力系统中有着广泛的应用,它具有体积小、重量轻,结构紧凑,动态响应快,电气噪声低、无火花,定子暂态稳定等优点。
因此,同步电机的数学模型和参数研究,已经成为当今智能电机控制课题的关键研究焦点。
2.于工作原理方面,同步电机是一种特殊的交流电动机,它可以调整定子磁场强度来达到转速调节的目的,从而实现“扭矩输出”或“位置追踪”等功能。
同步电机的核心部件包括定子磁铁、转子磁铁、定子绕组、转子绕组和绝缘系统等,它们在电机同步运行的过程中,起着不可替代的作用。
3.下来,我们转入同步电机的数学建模,数学建模是用系列的方程来描述同步电机的工作原理,这一方法可以有效地研究同步电机的动态特性与控制特性。
首先,我们可以基于微分变换建立定子磁场模型,来描述定子电流;其次,以基于电磁耦合建立转子磁场模型来描述转子磁流;最后,基于电磁力和动量定律,建立转子的动态模型来描述转子的运动特性。
4.型参数确定是同步电机数学建模的重要环节,参数确定的目的是考量电机各个部分之间的耦合,以便准确描述电机的运行特性。
首先,可以通过实验测量获得一些模型参数,包括电机定子导纳、转子导纳、定子绕组电阻、转子绕组电阻、定子磁系数等;其次,也可以使用拟合技术来确定一些无法通过实验测量的模型参数,如转子磁系数、定子线圈受磁滞特性的影响等。
5.过模型参数确定之后,下一步就是模型验证。
如何确保模型参数的准确性,以保证模型的可靠性是模型验证所要面对的重要课题。
这里,可以利用相关实验数据,来确定模型参数的准确性;可以利用特定标准,来确定模型的模拟精度;可以利用求解特定问题的方法,来确定模型的优化性能。
同步电机定转子侧变量对应关系及名称112X ()q q 励磁电动势=i 空载电动势(后面的电动势)=瞬变电动势(后面的电动势)q 轴超瞬变电动势(后面的电动势)d 轴超瞬变电动势(后面的电动势)→→'''→=''''''→=+-''''''→=-→=-'→=-ff f f ad f f d q ad f ad f qd q f f ad D q d q D f f D f D adaq Q d d QQ q d aq g a q d u u E E X r E E X i XψE X E ψX X ψE X E X ψX ψX X X X ψE X E ψX i E X i X i E ⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩q g g ψX同步发电机16各变量:13个电磁变量:定子侧6个(dq u 、dq i 、dq ψ);转子侧7个(f u 、fDQ i 、fDQ ψ)3个机电变量:(m T 、r ω、δ) 同步发电机10个基本方程(dqfDQ u 、dqfDQ ψ):00=-+-⎧⎪=-++⎪⎪=-+⎪⎪=-+⎪=-+⎪⎨=-++⎪⎪=-+⎪=-++⎪⎪=-++⎪⎪=-+⎩d d d r qq q q r d ff f fD D D Q Q Qdd d ad f ad D qq q aq Qf ad d f f ad D D ad d ad f D D Qaq q Q Q u ri p ψωψu ri p ψωψu r i p ψr i p ψr i p ψψx i x i x i ψx i x iψx i x i x i ψx i x i x i ψx i x i三阶实用模型:这种模型的导出基于如下假定:忽略定子绕组暂态和阻尼绕组作用,计及励磁绕组暂态和转子动态 (1)忽略定子d 、q 轴暂态,即定子电压方程中d p ψ、q p ψ均为0;(2)在定子电压方程中,1(..)≈r ωp u ,在速度变化不大的过渡过程中,误差很小;(3)忽略D 、Q 绕组,其作用可在转子运动方程中补入阻尼项近似考虑。
第二节 同步发电机的基本方程、参数和等值电路一.基本方程(一)回路电压方程和磁链方程 1.绕组模型(1)6绕组模型,定子abc 三相绕组,励磁绕组ff ,d 轴阻尼绕组DD ,q 轴阻尼绕组; (2)磁链正方向在绕组的轴线上,q 轴超前d 轴90º(发电机一般处于过激,过励状态); (3)定子正电流产生负磁链(过激运行,电枢反应为去磁作用); (4)转子正电流产生正磁链(转子方程符合右手螺旋定则); (5)定子流出正电流,电压为正(电源); (6)转子侧绕组流入正电流,电压为正(负载); 2.回路电压方程定子回路:a a a a a a a a a a i r dt d i r e i r u ψψ +-=+-=+-=dtd e ψ=,正电流产生负磁链b b b bb b b b b b i r dt d i r e i r u ψψ +-=+-=+-= c c c cc c c c c c i r dtd i re i r u ψψ +-=+-=+-=转子回路:f f f f f f f f f i r dt d r e i r u ψψ +=+=+=(负载反电势)D绕组:D D D DD D D D D i r dtd re i r u ψψ +=+=+==0 Q绕组:Q Q Q Q Q Q Q Q Q i r dtd re i r u ψψ +=+=+==0 用分块矩阵形式简写为:abc abc ss abc ψi r u +-=fDQ fDQ RR fDQ ψi r u += 3.磁链方程⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡---•⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡Q D f c b a QQ QDQfQcQbQaDQ DD Df Dc Db Da fQ fD ff fc fb fa cQ cD cf cc cb ca bQ bD bf bc bb ba aQ aD af ac ab aaQ D f c b a i i i i i i L M M M M M M L M M M M M M L M M M M M M L M M M M M M L M M M M M M L ψψψψψψ 4.电感系数分析原理:电感正比于磁通,磁通反比于磁阻,磁阻正比于气隙宽度; 气隙宽度小,电感系数大;气隙宽度大,电感系数小。
2.1同步发电机数学模型及运行特性本节主要阐述同步发电机稳态数学模型及运行特性:包括向量图、等值电路与功率方程以及功角特性。
2.1.1 同步发电机稳态数学模型理想电机假设:1)电机铁心部分的导磁系数为常数;2)电机定子三相绕组完全对称,在空间上互差120度,转子在结构上对本身的直轴和交轴完全对称;3)定子电流在空气隙中产生正弦分布的磁势,转子绕组和定子绕组间的互感磁通也在空气隙中按正弦规率分布;4)定子及转子的槽和通风沟不影响定子及转子的电感,即认为电机的定子及转子具有光滑的表面。
同步电动机是一种交流电机,主要做发电机用,也可做电动机用,一般用于功率较大,转速不要求调节的生产机械,例如大型水泵,空压机和矿井通风机等。
近年由于永磁材料和电子技术的发展,微型同步电机得到越来越广泛的应用。
同步电动机的特点之一是稳定运行时的转速n与定子电流的频率f1之间有严格不变的关系,即同步电动机的转速n与旋转磁场的转速n0相同。
“同步”之名由此而来。
同步发电机是电力系统中的电源,它的稳态特性与暂态行为在电力系统中具有支配地位。
虽然在电机学中已经学过同步电机,但那时侧重于基本电磁关系,而现在则从系统运行的角度审视发电机组。
1.同步发电机的相量图设发电机以滞后功率因数运行,三相同步发电机正常运行时,定子某一相空载电势Eq,输出电压或端电压U和输出电流I间的相位关系如图2-1所示。
δ是Eq领先U的角度,称为功角,是功率因数角,即U与I的相位差, Eq与q轴(横轴或交轴)重合,d为纵轴或直轴。
U和I的d、q分量为:图 2-1电势电压相量图电机学课程中已经讨论过,端电压和电流的分量与Eq间的关系为:(2-3)式中,r为定子每相绕组的电阻,x d为定子纵轴同步电抗,x q为定子横轴同步电抗。
其中空载电势Eq与转子励磁绕组中的励磁电流成正比,其比例系数可从空载试验中得到。
为了便于绘制相量图,令d轴作正实轴,q轴作正虚轴,则各相量可表示为所以(2-7)对于隐极式同步发电机(汽轮发电机),因气隙均匀,直轴和交轴同步电抗相等(x d=x q),上式变为(2-8)此即表示隐极式同步发电机的方程,由此即可作出它的等值电路和相量图,如图2-2所示(a)等值电路(b)矢量图图2-2 隐极式同步发电机等值电路和矢量图凸极式同步发电机(水轮发电机),把电枢反应磁势分解为d轴及q轴两个分量,d轴电枢反应磁势的位置固定在转子d轴上,q轴电枢反应磁势的位置固定在转子q轴上,从而解决了合成磁势遇到的不同气隙宽度的困难。
附录A
(资料性附录)
常见数学模型
A.1汽轮机模型
A.1.1无再热器汽轮机模型
1
1sT CH
图 A.1 无再热器汽轮机模型A.1.2包含高压缸功率过调系数的汽轮机模型
F HP F
IP F
LP
111
1 sT CH 1 sT RH1sT CO
图 A.2 包含高压缸功率过调系数的汽轮机模型
A.2水轮机模型
A.2.1理想刚性水击水轮机模型
1sT W
10.5sT W
图 A.3 理想刚性水击模型混流式水轮机模型A.2.2非理想刚性水轮机模型
1saT W
1s0.5bT W
图 A.4 非理想的水击模型混流式水轮机模型
26
A.2.3 考虑开度影响的混流式水轮机模型
A t
y
NL
0.5
y
q
h
p m
G h (s)
1.5
图 A.5 考虑开度影响的混流式水轮机模型
图中: y —为主接力器行程;
y FL —额定负荷开度;
y NL —空载开度; A t —水轮机增益,
A t k /( y FL y NL ) ,k —为修正系数, 一般取 1,当主接力器行程与机组有功功率稳态值存在较大的非
T W s
线性时, k
取 0.8~ 1.2,各量均以标幺值表示。
G h
s
G h s
)
( ) —为有压过水系统水击模型,一般有
( 或 G h ( s)
h w
8T r s
8
2
T w s
2
s 2
8。
T r s 2
8
T r
A.2.4
转桨式水轮机模型
y
1 aT W s
P M
K P1
1 bT W s
y R
K R
K
P2
图 A.6 转桨式水轮机模型
A.3
控制系统的标准数学模型
A.3.1
汽轮机电液控制系统调节系统
图 A.7 汽轮机电液调节系统
27
A.2.3 考虑开度影响的混流式水轮机模型
A t
y
NL
0.5
y
q
h
p m
G h (s)
1.5
图 A.5 考虑开度影响的混流式水轮机模型
图中: y —为主接力器行程;
y FL —额定负荷开度;
y NL —空载开度; A t —水轮机增益,
A t k /( y FL y NL ) ,k —为修正系数, 一般取 1,当主接力器行程与机组有功功率稳态值存在较大的非
T W s
线性时, k
取 0.8~ 1.2,各量均以标幺值表示。
G h
s
G h s
)
( ) —为有压过水系统水击模型,一般有
( 或 G h ( s)
h w
8T r s
8
2
T w s
2
s 2
8。
T r s 2
8
T r
A.2.4
转桨式水轮机模型
y
1 aT W s
P M
K P1
1 bT W s
y R
K R
K
P2
图 A.6 转桨式水轮机模型
A.3
控制系统的标准数学模型
A.3.1
汽轮机电液控制系统调节系统
图 A.7 汽轮机电液
27
图 A.10 电液伺服系统模型
29
附 录 B
(资料性附录)
需收集的参数
表 B.1 汽轮机调节系统的参数
编号
参数名
符号 单位
数值
备注
1 转速测量环节时间常数
T 1
s 2 转速偏差死区 Hz 3 转速不等率
%
4 控制方式
5 PID 比例环节倍数 K P
6 PID 微分环节倍数 K I
7 PID 积分环节倍数 K D
8 PID 积分环节限幅上限 % 9 PID 积分环节限幅下限 % 10 PID 输出限幅环节的上限 % 11 PID 输出限幅环节的下限
%
12 负荷控制前馈系数 K
FF
13
一次调频频差上限 Hz 14
一次调频频差下限
Hz
表 B.2 汽轮机执行机构的参数
编号 参数名
符号 单位 数值 备注
1 单阀下高调门开度与流量关系
2
顺序阀下高调门开度与流量关系
3 油动机行程反馈时间参数 T 2 s
4 电液转换器比例放大倍数
K P 5 电液转换器积分倍数 K I 6
电液转换器微分倍数
K D
表 B.3 汽轮机的参数
编号 参数名
符号 单位
数值
备注
1 蒸汽容积时间常数 T CH s
2 高压缸功率比例 F HP %
3 再热器时间常数 T RH s
4 中压缸功率比例 F IP %
5 交叉管时间常数 T
CO
s
6
低压缸功率比例
F
LP
%
30
7
惯性时间常数
T J
s
表 B.4 锅炉的参数
编号 参数名
符号
单位 数值
备注
1 汽包容积时间常数 T
CS
s 2
过热器容积时间常数
T D
s
表 B.5 水轮机调节系统的参数
编号 参数名
符号 单位
数值
备注
1 转速测量环节时间常数
T 1 s 2 转速偏差死区
Hz 3 永态转差系数
b P
%
4 控制方式
5 PID 比例环节倍数 K P
6 PID 微分环节倍数 K I
7 PID 积分环节倍数 K D
8 PID 积分环节限幅上限 % 9 PID 积分环节限幅下限 % 10 PID 输出限幅环节的上限 % 11 PID 输出限幅环节的下限
%
12 微分时间常数
T
1V
s 13 一次调频频差上限 Hz 14
一次调频频差下限
Hz
表 B.6 水轮机及其引水系统的参数
编号 参数名
符号 单位
数值
备注
1 水流惯性时间常数
T W
s
2 空载开度
3 满载开度
4
惯性时间常数
T J
s
表 B.7 水轮机执行机构的参数
编号 参数名
符号 单位
数值
备注
1 接力器行程反馈环节时间 T 1 s
2 副环 PID 环节比例增益 K P
3 副环 PID 环节微分增益 K D
4 副环 PID 环节积分增益 K I
5
执行机构输出延时
T dy
表 B.8 燃气轮机调节系统的参数
编号 参数名 符号 单位
数值
备注
1
转速测量环节时间常数
T 1
s 2
转速偏差死区
Hz
31
3 转速不等率 %
4 控制方式
5 PID 比例环节倍数 K P
6 PID 微分环节倍数 K I
7 PID 积分环节倍数 K D
8 PID 积分环节限幅上限 % 9 PID 积分环节限幅下限
% 10 PID 输出限幅环节的上限 % 11 PID 输出限幅环节的下限
% 12 一次调频频差上限 Hz 13
一次调频频差下限
Hz
表 B.9 燃气轮机执行机构的参数
编号
参数名
符号
单位 数值
备注
1 燃料压力控制阀时间常数
T
VP
s
2
燃料流量控制阀时间常数 T
VF
表 B.10 燃气轮机的参数
编号
参数名
符号 单位 数值
备注
1
压气机时间常数
T
CD
s
32
附录 C
(资料性附录)
需采集的信号
表 C.1汽轮机组需采集的信号
编号参数名备注1机组转差
2机组功率
3DEH总阀位指令
4CCS协调控制指令
5高调门开度
6调节级压力
7高压缸排气压力
8中压缸进气压力
9中压缸排气压力
10主汽压力
表 C.2水轮机组需采集的信号
编号参数名备注1机组频率
2机组功率
3导叶开度
4桨叶开度
5调速器指令
6监控系统指令
表 C.3燃气机组需采集的信号
编号参数名备注1机组转差
2机组功率
3总燃料指令
4燃气阀开度
5IGV 开度
33。