3 测量系统基本特性
- 格式:pdf
- 大小:1.11 MB
- 文档页数:79
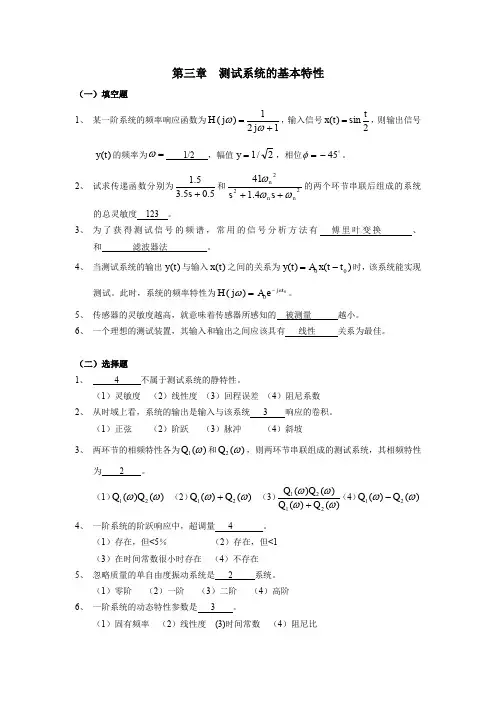

第3章习题--测试系统的基本特性第3章习题测试系统的基本特性⼀、选择题1.测试装置传递函数H (s )的分母与()有关。
A.输⼊量x (t )B.输⼊点的位置C.装置的结构 2.⾮线形度是表⽰定度曲线()的程度。
A.接近真值B.偏离其拟合直线C.正反⾏程的不重合 3.测试装置的频响函数H (j ω)是装置动态特性在()中的描述。
A .幅值域 B.时域 C.频率域D.复数域 4.⽤常系数微分⽅程描述的系统称为()系统。
A.相似 B.物理 C.⼒学 D.线形 5.下列微分⽅程中()是线形系统的数学模型。
A.225d y dy dx t y x dt dt dt ++=+ B. 22d y dx y dt dt += C.22105d y dyy x dt dt-=+ 6.线形系统的叠加原理表明()。
A.加于线形系统的各个输⼊量所产⽣的响应过程互不影响B.系统的输出响应频率等于输⼊激励的频率C.⼀定倍数的原信号作⽤于系统所产⽣的响应,等于原信号的响应乘以该倍数7.测试装置能检测输⼊信号的最⼩变化能⼒,称为()。
A.精度 B.灵敏度 C.精密度 D.分辨率8.⼀般来说,测试系统的灵敏度越⾼,其测量范围()。
A.越宽 B. 越窄 C.不变9.测试过程中,量值随时间⽽变化的量称为()。
A.准静态量 B.随机变量 C.动态量 10.线形装置的灵敏度是()。
A.随机变量B.常数C.时间的线形函数11.若测试系统由两个环节串联⽽成,且环节的传递函数分别为12(),()H s H s ,则该系统总的传递函数为()。
若两个环节并联时,则总的传递函数为()。
A. 12()()H s H s +B.12()()H s H s ?C.12()()H s H s -D.12()/()H s H s12.输出信号与输⼊信号的相位差随频率变化的关系就是()。
A.幅频特性B.相频特性C.传递函数D.频率响应函数 13.时间常数为τ的⼀阶装置,输⼊频率为 1ωτ=的正弦信号,则其输出与输⼊间的相位差是()。
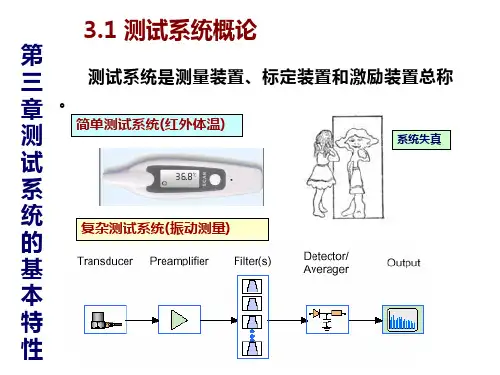
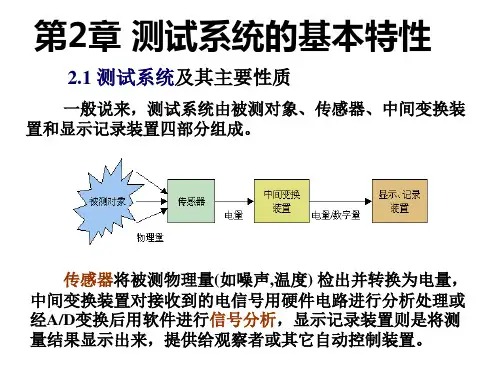
第3章 测量系统的基本特性3.1概述测量的目的是通过检测传感、信号调理、信号处理、显示和记录,将被测的物理量提供给测量者。
测量系统是在整个测量过程中所用到的各种仪器和装置的组合。
为了正确描述或反映被测的物理量,实现不失真测量,获取和分析测量系统特性尤为重要。
测量系统示意图见图3-1所示,其中x (t )表示测量系统的输入量, y (t )表示测量系统的输出量,h (t )表示测量系统的输入与输出的关系,即测量系统的传递特性。
三者之间一般有如下关系:1) 测量系统传递特性已知,输出可测,则由此可推断导致该输出的输入量。
工程上称为载荷识别或环境预估。
2) 测量系统传递特性和输入已知,则可推断和估计系统的输出量。
工程上称为响应预估。
3) 系统的输入和输出可测取或已知,推断系统的传递特性。
这个过程称为系统辨识或参数识别。
图3-1测量系统框图理想的测量系统应具有单值的、确定的输入输出关系,且输入输出之间呈线性关系。
然而,大多数实际测量系统都不可能在较大的工作范围内完全保持线性,而只能在一定的工作范围和误差允许范围内近似的作为线性处理。
如果测量系统的输入x (t )和输出y (t )之间的关系可用下列常系数线性微分方程来描述:(3-1)当a n ,a n-1,…,a 0和b n ,b n-1,…,b 0均为不随时间变化的常数时,则被描述的系统称)()()()()()()()(0111101111t x b dtt dx b dt t x d b dt t x d b t y a dt t dy a dt t y d a dt t y d a m m m m m m n n n n n n ++⋅⋅⋅++=++⋅⋅⋅++------为时不变系统或定常系统,且该系统满足单值性并具有确定的输入输出关系,即满足理想系统的要求。
但是严格地说,许多实际测量系统都是时变的。
因为构成系统的材料和元部件的特性并非稳定。
例如电子元件中电阻、半导体器件,弹性材料的弹性模量等都会受温度影响而随时间产生变化,它们的不稳定会导致上述微分方程中系数的时变性。
三坐标测量机探测系统的分类及特点三坐标测量机的探测系统是由测座、测头、探针组成的系统,测头是测量机探测时发送信号的装置,它可以输出开关信号,亦可以输出与探针偏转角度成正比的比例信号,它是坐标测量机的关键部件,测头精度的高低很大程度决定了测量机的测量重复性及精度;不同零件需要选择不同功能的测头进行测量。
1、测头的分类◆触发测头:触发测头(Trigger Probe):又称为开关测头,测头的主要任务是探测零件并发出锁存信号,实时的锁存被测表面坐标点的三维坐标值。
触发测头一般发出的为跳变的方波电信号,利用电信号的前缘跳变作为锁存信号,由于前缘信号很陡,一般在微秒级,因此保证了锁存坐标值的实时性。
◆扫描测头(Scanning Probe):又称为比例测头或模拟测头,此类测头不仅能作触发测头使用,更重要的是能输出与探针的偏转成比例的信号(模拟电压或数字信号),由计算机同时读入探针偏转及测量机的三维坐标信号(作触发测头时则锁存探测表面坐标点的三维坐标值),以保证实时的得到被探测点的三维坐标,由于取点时没有测量机的机械往复运动,因此采点率大大提高,扫描测头用于离散点测量时,由于探针的三维运动可以确定该点所在表面的法矢方向,因此更适于曲面的测量。
◆接触式测头与非接触式测头:接触式测头(Contact Probe):需与待测表面发生实体接触的探测系统。
非接触式测头(Non-Contact Probe):不需与待测表面发生实体接触的探测系统,例如光学探测系统、激光扫描探测系统等。
2、分度测座◆集成测头的手动旋转测座特征:基本型,经济实用的集成式测头和测座系统,可以手动定位内置测头的方位,从而在空间内完成工件所有特征的测量。
◆集成测头的手动分度式测座两个自由度的集成测头和测座系统,允许以设定的可重复分度在空间内手动定位其内置的测头,提高了手动和机动测量机的灵活性。
◆自动可分度测座特征:两个自由度的测座,可在空间内以良好的重复性自动定位测头,能够自动更换测量传感器,旋转后不需重新校准测头,因此针对工件的表面可以选择最适合的角度测量。