台达 四轴脉冲型运动控制模块AH15PM-5A
- 格式:pdf
- 大小:335.55 KB
- 文档页数:1


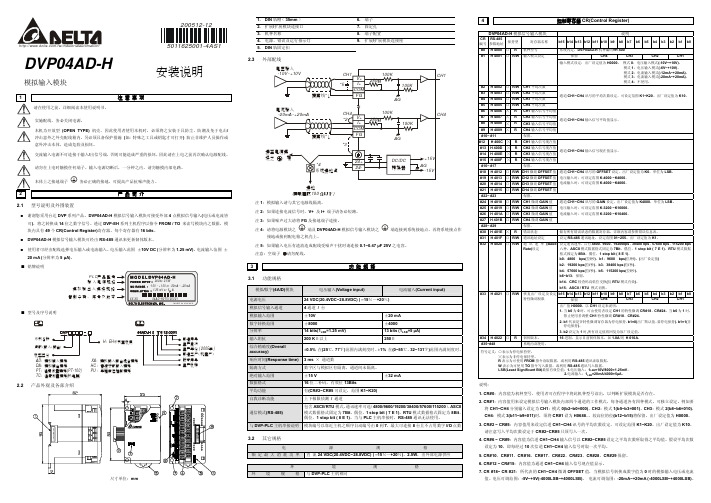
14应用指令简单定位设计范例14.1 台达ASDA伺服简单定位演示系统X1伺服电机Y0脉冲输出Y1正转反转/Y4脉冲清除DOP-A人机ASDA伺服驱动器WPLSoft【控制要求】z由台达PLC和台达伺服组成一个简单的定位控制演示系统。
通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
z监控画面:原点回归、相对定位、绝对定位。
【元件说明】PLC软元件说明M0 原点回归开关M1 正转10圈开关M2 反转10圈开关M3 坐标400000开关M4 坐标-50000开关M10 伺服启动开关M11 伺服异常复位开关M12 暂停输出开关(PLC脉冲暂停输出)M13 伺服紧急停止开关X0 正转极限传感器X1 反转极限传感器X2 DOG(近点)信号传感器X3 来自伺服的启动准备完毕信号(对应M20)X4 来自伺服的零速度检出信号(对应M21)X5 来自伺服的原点回归完成信号(对应M22)X6 来自伺服的目标位置到达信号(对应M23)X7 来自伺服的异常报警信号(对应M24)Y0 脉冲信号输出14应用指令简单定位设计范例Y1 伺服电机旋转方向信号输出Y4 清除伺服脉冲计数寄存器信号Y6 伺服启动信号Y7 伺服异常复位信号Y10 伺服电机正方向运转禁止信号Y11 伺服电机反方向运转禁止信号Y12 伺服紧急停止信号M20 伺服启动完毕状态M21 伺服零速度状态M22 伺服原点回归完成状态M23 伺服目标位置到达状态M24 伺服异常报警状态【ASD-A伺服驱动器参数必要设置】参数设置值说明P0-02 2伺服面板显示脉冲指令脉冲计数P1-00 2外部脉冲输入形式设置为脉冲+方向P1-01 0位置控制模式(命令由外部端子输入)P2-10 101当DI1=On时,伺服启动P2-11 104当DI2=On时,清除脉冲计数寄存器P2-12 102当DI3=On时,对伺服进行异常重置P2-13 122当DI4=On时,禁止伺服电机正方向运转P2-14 123当DI5=On时,禁止伺服电机反方向运转P2-15 121当DI6=On时,伺服电机紧急停止P2-16 0无功能P2-17 0无功能P2-18 101当伺服启动准备完毕,DO1=OnP2-19 103当伺服电机转速为零时,DO2=OnP2-20 109当伺服完成原点回归后,DO3=OnP2-21 105当伺服到达目标位置后,DO4=OnP2-22 107当伺服报警时,DO5=OnÚ当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。


DVP -15MC 系列运动控制器操作手册DVP-15MC 系列运动控制器操作手册地址:上海市浦东新区民夏路238号邮编:201209电话:(021)5863-5678传真:(021)5863-0003网址:DVP-0199410-042020/01/13上海电话:(021)6301-2827传真:(021)6301-2307武汉电话:(027)8544-8265传真:(027)8544-9500济南电话:(0531)8690-7277传真:(0531)8690-7099乌鲁木齐电话:(0991)6118-160传真:(0991)6118-289沈阳电话:(024)2334-1612传真:(024)2334-1163南昌电话:(0791)8625-5010传真:(0791)8625-5102长沙电话:(0731)8827-7881传真:(0731)8827-7882郑州电话:(0371)6384-2772传真:(0371)6384-2656西安电话:(029)8669-0780传真:(029)86690780-8000长春电话:(0431)8892-5060传真:(0431)8892-5065合肥电话:(0551)6281-6777传真:(0551)6281-6555南宁电话:(0771)5879-599传真:(0771)2621-502北京电话:(010)8225-3225传真:(010)8225-2308成都电话:(028)8434-2075传真:(028)8434-2073南京电话:(025)8334-6585传真:(025)8334-6554厦门电话:(0592)5313-601传真:(0592)5313-628天津电话:(022)2301-5082传真:(022)2335-5006重庆电话:(023)8806-0306 传真:(023)8806-0776杭州电话:(0571)8882-0610传真:(0571)8882-0603广州电话:(020)3879-2175传真:(020)3879-2178太原电话:(0351)4039-475传真:(0351)4039-047哈尔滨电话:(0451)5366-0643传真:(0451)5366-0248绵密网络 专业服务中达电通已建立了48个分支机构及服务网点,并塑建训练有素的专业团队,提供客户最满意的服务,公司技术人员能在2小时内回应您的问题,并在48小时内提供所需服务。

• Clasificación 1000 V CAT IV (Modelos 403, 603 y 405)• Retardo de inflamación y auto extinguible según UL 94 V1• Pantalla electroluminiscente azul de 10000 cuentas (paralas series 400 y 600) y de 6000 cuentas (para la serie 200)con retroiluminación• Mide hasta 1000 V CA (1400 V pico), 1000 V CC y CA+CC conresolución hasta 10 mV• Mide hasta 2000 A CA y 3000 A CC (dependiendo del modelo)• Mide potencia monofásica y trifásica (real, reactiva y aparente)hasta 3 MW con resolución de 1 W (dependiendo del modelo)• Mediciones W, VA, var y PF para sistemas equilibradosmonofásicosy trifásicos (modelos 205 y 405 )• Mide la frecuencia hasta 20 kHz con resolución de 0,1 Hz• Selección automática de medición CA o CC• Medición True InRush®(de corriente de irrupción efectiva) concaptura de 100 ms•Abertura de pinza hasta 34 mm (1,34 pulg.) (serie 200), 48,0 mm(1,89 pulg.) (serie 400) y hasta 59,9 mm (2,36 pulg.) (serie 600)•Termopar tipo K y adaptador incluido (Modelos 403 y 603) Consulte con fábrica sobre precios de calibración NIST.2139.31Medidor de pinza modelo 603 (TRMS, 1000 V/, 2000 A CA/3000 A, ohmios, continuidad, temperatura)2139.40Medidor de pinza modelo 205 (TRMS, 1000 V CA/CC, 600 A CA/900 A CC, ohmios, continuidad, rotación de fase, potencia, THD)2139.50Medidor de pinza modelo 405 (TRMS, 1000 V/, 1000 A/1500 A, ohmios, continuidad, rotación de fase, potencia, THD)INCLUYEN o de catálogo 2139.21, 2139.31 Juego de dos sondas de prueba desilicona aisladas identificadas por colores, puntas de prueba y pinzastipo cocodrilo, termopar tipo K con adaptador de 4 mm integrado, fundablanda de transporte, cuatro baterías AA de 1,5 V y manual de usuario.N o de catálogo 2139.40 Juego de dos sondas de prueba de 1,5 m(5 pies) con punta identificadas por colores y con terminales tipo bananade 4 mm de ángulo recto, funda blanda de transporte, una batería de 9 Vy manual de usuario.N o de catálogo 2139.50 Juego de dos sondas de prueba de siliconaaisladas identificadas por colores, puntas de prueba y pinzas tipococodrilo, termopar tipo K con adaptador de 4 mm integrado, fundablanda de transporte, cuatro baterías AA de 1,5 V y manual de usuario. MODELOS 403/603 Y 205/405Alto grado de seguridad para losusuarios de medidores de clasificación1000 V CAT IV (dependiendo del modelo)205403603405Consulte con fábrica sobre precios de calibración NIST.Rev.00 03/2023*************** 13。
/DVP-1191470-01………………………………………………………………… ENGLISH …………………………………………………………………… Thank you for choosing Delta DVP-MC series motion controller. DVP-MCseries is a multi-axis motion controller based on CANopen fieldbus and can be applied in packaging machines, printing machines, taping machines, cutting machines, digital control lathes and automated storage systems.Please read this instruction sheet carefully using DVP10MC11T and follow the instructions to avoid damages on the product or injuries on staff.Switch off the power supply before wiring.This instruction sheet offers information on electrical specifications, functions, installation, wiring and trouble-shooting for DVP-MC series. For more details, see the operation manual for DVP10MC11T.DVP10MC11T is an OPEN TYPE device and therefore should be installed in an enclosure free of airborne dust, humidity, electric shock and vibration. The enclosure should prevent non-maintenance staff from operating the device (e.g. key or specific tools are required to open the enclosure) in case danger and damage on the device may occur.DVP-MC series is for controlling the machines or equipment in operation. To avoid damaging it, only qualified staff who knows it well is allowed to install, operate, wiring and maintain it.DO NOT connect the input AC power supply to any of the I/O terminals; otherwise series damages may occur. Check all the wirings again before switching on thepower.Product Profile & DimensionsUnit: mm [inch][Figure 1][Figure 2]○1Model name○11CANopen communication port○2POWER, RUN, ERR indicators○12Extension module fixing clip○3COM1, COM2 indicators○13I/O terminals○4CAN, MTL indicators○14Direct mounting hole○5RUN/STOP switch○15Right-side extension port○6Encoder interface○16COM2 port○7RESET button○1724V power supply port○8COM1 port○18Left-side extension port○9Ethernet port○19Nameplate○10DIN rail clipElectrical Specifications✹ Power SupplyPower supply voltage24 VDC (-15 to +20%) Power supply fuse 3 A/30 VDC, Polyswitch Insulation voltage 500 VDC (Secondary-PE) Power consumption 8 W Max.Shock/vibration immunity Standards: IEC61131-2, IEC 68-2-6 (TEST Fc)/IEC61131-2 & IEC 68-2-27 (TEST Ea)Noise immunity ESD (IEC 61131-2, IEC 61000-4-2): 8 kV Air DischargeEFT (IEC 61131-2, IEC 61000-4-4): Power Line: 2 kV, Digital I/O: 1 kV, Analog & Communication I/O: 1 kVDamped-Oscillatory Wave: Power Line: 1 kV, Digital I/O: 1 kVRS (IEC 61131-2, IEC 61000-4-3): 26 MHz ~ 1GHz, 10 V/mAmbiance Operation: 0 to 55°C (temperature), 50 to 95% (humidity), pollution degree 2Storage: -25 to 70°C (temperature), 5 to 95% (humidity)Weight Approx. 240g✹ I/O SpecificationsI/O channels 8 input channels, 4 output channelsI/O channel types 8 high-speed digital input channels, 4 high-speed digital output channelsI/O terminals Input terminals: I0, I1, I2, I3, I4, I5, I6, I7 Output terminals: Q0, Q1, Q2, Q3Common terminal for input points Wiring terminal S/S (for connecting to the positive or negative pole of the power supply)Input types Sink or SourceI/O delay time Input: 2.5 µs (OFF∙ON), 5 µs (ON∙OFF) Output: 2 µs (OFF∙ON), 3 µs (ON∙OFF)Input signal current 24 VDC, 5 mAMax. I/O cable length Shielded: 500m; Not shielded: 300m Power supply foroutput points24 VDC (-15 to +20%) #1Max. load Resistive load: 0.5 A/1 point (2A/ZP) Conductive load: 13 W (30 VDC) Light bulb load: 2.5 W (30 VDC)#1: UP and ZP must use external auxiliary 24 VDC power supply (-15 to 20%).COM Ports✹ COM1 (RS-232)DVP10MC11T offers one RS-232 port. See the table below for the PIN definitions.PIN Signal Definition1, 2 +5V 5V power supply (positive pole)3 GND Earth4 Rx Receivingdata5 Tx Sendingdata6 GND Earth7 NC Reserved8 GND Earth✹ COM2 (RS-485)DVP10MC11T offers one RS-485 port. See the table below for the PIN definitions.PIN SignalDefinition1 + Signal+2 _ Signal-3 SG--✹ CANopen Communication PortDVP10MC11T offers two RJ45 connectors as the interface for motion control. When establishing a network, use standard CAN cables for the CAN bus, e.g. Delta TAP-CB03 or TAP-CB04. You will need termination resistances at the two ends of the bus, e.g.Delta TAP-TR01.PINSignalDefinition 1 CAN_H Signal+ 2 CAN_L Signal- 3 CAN_GND 0 VDC 4 RESE_1 Reserved 5 RESE_2 Reserved 6 CAN_SHLD Shielded cable7 CAN_GND 0 VDC 8 RESE_3Reserved✹ Encoder InterfaceDVP10MC11T offers one 9-PIN D-SUB encoder interface. See the table bellows for theterminal definitions.TerminalSignalDefinition1 A+2 B+3 Z+6 A-7 B-8 Z- Incremental encoder4 +24VEXT5 GNDEXT 24V encoder9 +5VEXT+5V encoder✹ Ethernet PortDVP10MC11T offers one Ethernet port, supporting Modbus/TCP protocol. See the tablebelow for the terminal definitions.TerminalSignal Definition 1 Tx+ Sending data (positive) 2Tx-Sending data (negative)3 Rx+ Receiving data (positive)4 -- N/C5 --N/C6 Rx- Receiving data (negative)7 -- N/C8 --N/CInstallation & Wiring✹ InstallationInstall DVP10MC11T in an enclosure with sufficient space around it to allow heat dissipation. D > 50mm (See the figure).✹ Input Point WiringModeSimplified modelWiring loopSinkSource✹ Output Point WiringAll transistor outputs in DVP10MC11T include zener diode, which is sufficient enough for small-power conductive load and infrequent On/Off applications. However, in big-power or frequent On/Off occasions, follow the method below to connect to suppression circuit to reduce interferences and avoid the transistor output circuit from being damaged due to over-voltage or overheating.[Figure 3]◆ 24 VDC power supply Fuse♦ Emergency stop button ⌧ Load: Switch, conductive load⍓ 9V Zener diode, 5W (Use ⍓ and when in big-power and frequent On/Off occasions) Diode or equivalent components for suppression (Use only when in small-power loads)Connecting to DVP-S Series Extension ModulesLED Indicators & Trouble-Shooting✹ ERR LEDLED status Indication How to correct Off PLC in normal operation --Red light flashing Syntax errors in the PLCprogram; devices orcommands exceed theallowed rangeFind out the cause of error from register D1004 inthe PLC and the location of error from D1137. Fordetails, see “DVP-PLC Application Manual:Programming”.Red light quickly flashing Insufficient power supplyfor DVP10MC11TCheck if the power supply load for DVP10MC11Tis normal.✹ CAN LEDLED status Indication How to correctGreen light single flashing CANopen network inSTOP statusThe host controller is downloading the programand waiting for the download to be completed.Green light flashing CANopen network inpre-operational statusCheck if the CANopen network is connectedcorrectly.Check if the slave configured on the networkexists.Check if the slave is offline.Green light constantly on CANopen network inoperational status--Red light single flashing Bus error, exceeding thealarm levelCheck if the connecting cable for the CANopenbus is standard cable.Check if there are termination resistances atboth ends of the CANopen bus.Check if the interferences around the CANopenbus are too big.Red light constantly on Bus-offCheck if the cable connection in the CANopennetwork is correct.Check if the baudrate of DVP10MC11T isconsistent with its slaves.✹ MTL LEDLED status Indication How to correctOff DVP10MC11T is notconfigured with slaves.Configure slaves for DVP10MC11T in theCANopen Builder software and download theconfiguration.Green light on DVP10MC11T inoperational status;motion control programin executing status.--Green light flashing DVP10MC11T has notbeen connected with theslave.Check if the CANopen network is connectedcorrectly.Check if the slave configured on the networkexists.Red light constantly on Hardware error inDVP10MC11TSend DVP10MC11T back to factory for repair.Red light flashing DVP10MC11T isoperating in abnormalstatus.Check if the set synchronous scan period is tooshort.Check if there is slave offline from the CANopennetwork.Press the RESET button on DVP10MC11T(Re-enter STOP status after the program isexecuted.)Ethernet LEDLED LED status IndicationOn The baudrate for Ethernet communication is 100 Mbps.Orange lightOff The baudrate for Ethernet communication is 10 Mbps, or DVP10MC11T has not been connected to the Ethernet.Flashing The Ethernet port on DVP10MC11T is sending or receiving data.Green lightOff The Ethernet port on DVP10MC11T is not sending or receiving data.………………………………………………………………… 繁體中文 ………………………………………………………………………感謝您採用台達DVP-MC系列運動控制器。
台达运动控制型PLC应用技术FP0+、FP0-、FP1+、FP1-:脉冲输出端口RP0+、RP0-、RP1+、RP1-:脉冲输出端口(注:0表示第一轴,1表示第二轴,如START0表示启动第一轴,START1表示启动第二轴,其他信号依次类推)从端子分布可以看到,除了常用的极限和启动停止信号外,配置了过零脉冲PG和手摇轮功能输入端,手摇轮是机床应用中常用而必备功能,而利用过零信号在精确控制场合往往会用到,当然更不用说定位控制中都会用到的DOG原点信号。
2.3配线规格一般I/O点配线就不再赘言了,可以关注一下PLC比较少用到的差分输入输出方式,在信号中有一部分是这样的,一定要注意否则将不能正确完成,参见图2、图3。
图2差分输入配线示意图图3差分输出配线示意图3 台达运动控制型PLC软件结构3.1 DVP20PM程序结构由于20PM主机结合了PLC顺序逻辑控制及双轴插补定位控制的功能,因此在程序架构上主要分为O100主程序、Ox运动子程序及Pn子程序等三大类,结合了基本指令、应用指令、运动指令及G Code指令,使程序设计更多元化,结构更清晰;程序采用PMSOFT软件进行编辑,参见图4。
图4 程序设计界面(1)主程序。
主程序以O100作为起始标记,M102作为结束标记,是PLC顺序控制程序,主要为控制主机动作执行,在O100主程序区域中,可以使用基本指令及应用指令,或在程序中启动Ox0~Ox99运动子程序及调用Pn子程序。
主要提供主控制程序的建立,以及运动子程序的设定及启动控制。
(2)运动子程序。
Ox0~Ox99运动子程序为运动控制程序,主要为控制20PM系列主机进行X-Y轴双轴运动之子程序,于Ox0~Ox99运动子程序区段中,有支持基本指令、应用指令、运动指令及G码指令,并在程序中可规划呼叫Pn指针子程序,通过PLC提供的内部特D特M进行子程序的控制。
主要提供运动子程序的建立,以及运动子程序的运动控制,在架构上可算是20PM的运动指令及G码指令规划区域。
D1020 X0~X7输入滤波器,接收脉冲的反应时间,单位ms,调节范围2~20msC244 32位上下高速计数器停电保持,M1244决定上下数,1相1输入,X0:U/D,X1:R,X3:SM1138 COM1通讯设定保持用D1036 COM1(RS-485)主站或从站通讯协议,b7~b4:(H8:9600 bps),b3(0:1 stop bit,1:2 stop bits),b2、b1(00:无校验,01:奇校验,11:偶校验),b0(0:7位数据,1:8位数据),如H87=(9600,8,E,1,RTU)M1139 COM1 RTU模式设置,off时ASCII modeM1120 COM2通讯设定保持用D1120 COM2(RS-485)主站或从站通讯协议,b7~b4:(H8:9600 bps),b3(0:1 stop bit,1:2 stop bits),b2、b1(00:无校验,01:奇校验,11:偶校验),b0(0:7位数据,1:8位数据),如H87=(9600,8,E,1,RTU)M1143 COM2(RS-485)的ASCII或RTU模式选择,(off:ASCII,on:RTU)D1121 COM1、COM2从站通讯地址M1136 COM3通讯设定保持用D1109 COM3(RS-485)主站或从站通讯协议,b7~b4:(H8:9600 bps),b3(0:1 stop bit,1:2 stop bits),b2、b1(00:无校验,01:奇校验,11:偶校验),b0(0:7位数据,1:8位数据),如H87=(9600,8,E,1,RTU)M1320 COM3(RS-485)的ASCII或RTU模式选择,(off:ASCII,on:RTU)D1255 COM3从站通讯地址M1161 8或16为处理模式选择,(off:16位,on:8位),8位时,b0~b7有效,b8~b15无效D1129 通讯逾时异常时间,单位ms,为0时则无逾时情况M1129 COM2(RS-485)逾时出现时自动变为on,可利用此标志作通讯逾时的处理,但必须记得处理完成后,将M1129清除M1355 手动设置连接从站,off时检测从站是否连接M1360 on时连线从站1启动M1002 等同于first_scanM1000 等同于always_onD1121 主站PLC通讯地址,即主站站号M1122 COM2送信要求,置位送信,结束自动复位M1123 COM2接收完毕M1140 MODRD/MODWR/MODRW数据接收错误M1141 MODRD/MODWR/MODRW指令参数错误M1029 PLSY、PLSR指令脉冲输出Y0执行完毕置位,动作处理完毕由使用者清除,PLSY、PLSR指令off时,M1029为offM1030 PLSY、PLSR指令脉冲输出Y1执行完毕置位,动作处理完毕由使用者清除,PLSY、PLSR指令off时,M1030为offM1102 Y2(同上)M1103 Y3(同上)M1031、M1032、M1033 停电记忆保持相关M1031:清除所有非停电保持区域,,M1032:清除所有停电保持区域,M1033:on时,PLC由run到stop,非停电保持区域和输出状态不变化M1010 PLSY Y0模式选择,on=连续输出M1023 PLSY Y1模式选择,on=连续输出M1011 10ms时钟脉冲,一半off一半onM1012 100ms时钟脉冲M1013 1s时钟脉冲M1014 1min时钟脉冲M1028 10ms时间切换标志,off时T64~T126时基是100ms,on时是10msM1038 1ms时间切换标志,off时T200~T255时基是10ms,on时是1msM1043 原点回归完毕M1243、M1244 C243、C244R输入点的清除功能关闭,即on时关闭,默认不关闭M1271、M1273、M1274、M1275 相关输入点R功能关闭D1240~D1243 中断发生时,PLC自动将计数值搬至制定特D中并清除计数器的值D1022 2相2输入倍频选择,=2时为2倍频,=4时为4倍频M1016 实时时钟公元年显示,on时显示2012,off时显示12D1313 秒D1314 分D1315 时D1316 日D1317 月D1318 星期D1319 年M1304 on时可通过软件强制X输入点on或者off,但是PLC上对应X点的LED灯不亮D1343 加减速时间设置,单位msM1346 清除信号输出,原点回归有效M1029、M1030、M1031、M1032 Y0、Y1、Y2、Y3脉冲输出结束标志位,执行完毕后,自动onM1334 第一组脉冲,CH0暂停输出D1167 COM1接收到存于D1167的特定的字符,执行I140中断D1168 COM2接收到存于D1168的特定字符,执行I150中断D1169 COM3接收到存于D1169的特定字符,执行I160中断M1004、D1004、D1137 文法检查错误,M1004为on,D1004侦错码,D1137错误地址M1025、D1025 通讯错误,M1025为on,D1025数值为侦错码模拟量见ES2手册P83:AD模拟量输入:-10V~10V对应数值-2000~2000,-20ma~20ma对应数值-2000~2000DA模拟量输入:-10V~10V对应数值-2000~2000,0~20ma对应数值0~4000D1115 模拟量电压电流模式选择M1067~M1068,D1067~D1068 运算错误,P84对小数点的运算用二进制浮点数,DEBIN:十进制浮点数转换成二进制浮点数,DEBCD:二进制浮点数转换成十进制浮点数,FLT:BIN整数转换成二进制浮点数。