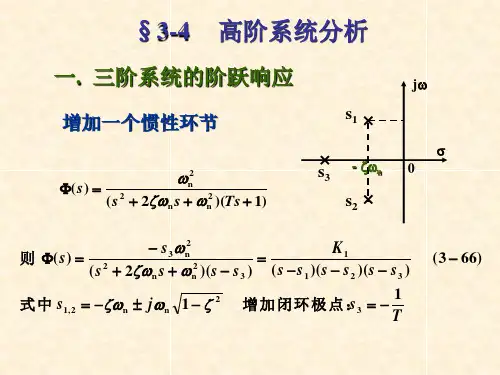
三阶系统的单位阶跃响应主导极点
- 格式:pptx
- 大小:342.80 KB
- 文档页数:12
自动控制理论第四版课后习题详细解答答案夏德钤翁贻方版集团标准化工作小组 #Q8QGGQT-GX8G08Q8-GNQGJ8-MHHGN#《自动控制理论 (夏德钤)》习题答案详解第二章2-1 试求图2-T-1所示RC 网络的传递函数。
(a)11111111+=+⋅=Cs R R CsR Cs R z ,22R z =,则传递函数为: (b) 设流过1C 、2C 的电流分别为1I 、2I ,根据电路图列出电压方程: 并且有联立三式可消去)(1s I 与)(2s I ,则传递函数为:2-2 假设图2-T-2的运算放大器均为理想放大器,试写出以i u 为输入,o u 为输出的传递函数。
(a)由运算放大器虚短、虚断特性可知:dtduC dt du C R u i i 0+-=,0u u u i c -=, 对上式进行拉氏变换得到 故传递函数为(b)由运放虚短、虚断特性有:022=-+--R u R u u dt du C c c i c ,0210=+R u R u c ,联立两式消去c u 得到 对该式进行拉氏变换得 故此传递函数为 (c)02/2/110=+-+R u R u u dt du Cc c c ,且21R uR u c i -=,联立两式可消去c u 得到 对该式进行拉氏变换得到 故此传递函数为2-3 试求图2-T-3中以电枢电压a u 为输入量,以电动机的转角θ为输出量的微分方程式和传递函数。
解:设激磁磁通f f i K =φ恒定2-4 一位置随动系统的原理图如图2-T-4所示。
电动机通过传动链带动负载及电位器的滑动触点一起移动,用电位器检测负载运动的位移,图中以c 表示电位器滑动触点的位置。
另一电位器用来给定负载运动的位移,此电位器的滑动触点的位置(图中以r 表示)即为该随动系统的参考输入。
两电位器滑动触点间的电压差e u 即是无惯性放大器(放大系数为a K )的输入,放大器向直流电动机M 供电,电枢电压为u ,电流为I 。
⾃动控制理论第四版课后习题详细解答答案(夏德钤翁贻⽅版)《⾃动控制理论(夏德钤)》习题答案详解第⼆章2-1 试求图2-T-1所⽰RC ⽹络的传递函数。
(a)11111111+=+?=Cs R R CsR Cs R z ,22R z =,则传递函数为: 2121221212)()(R R Cs R R R Cs R R z z z s U s U i o +++=+= (b) 设流过1C 、2C 的电流分别为1I 、2I ,根据电路图列出电压⽅程:=++=)(1)()]()([)(1)(2221111s I s C s U s I s I R s I sC s U o i 并且有)()1()(122211s I sC R s I s C += 联⽴三式可消去)(1s I 与)(2s I ,则传递函数为:1)(1111)()(222111221212211112++++=+ ++=s C R C R C R s C C R R R s C R s C s C R sC s U s U i o 2-2 假设图2-T-2的运算放⼤器均为理想放⼤器,试写出以i u 为输⼊,o u 为输出的传递函数。
(a)由运算放⼤器虚短、虚断特性可知:dtduC dt du C R u i i 0+-=,0u u u i c -=,对上式进⾏拉⽒变换得到)()()s U i i +-= 故传递函数为RCsRCs s U s U i 1)()(0+=(b)由运放虚短、虚断特性有:022=-+--R u R u u dt du Cc c i c ,0210=+R u R u c ,联⽴两式消去c u 得到02220101=++?u R u R dt du R CR i 对该式进⾏拉⽒变换得0)(2)(2)(20101=++s U R s U R s sU R CR i 故此传递函数为)4(4)()(10+-=RCs R R s U s U i (c)02/2/110=+-+R u R u u dt du Cc c c ,且21R uR u c i -=,联⽴两式可消去c u 得到 0222101=++?Ru R u dt du R CR ii 对该式进⾏拉⽒变换得到0)(2)(2)(2011=++?s U Rs U R s sU R CR i i 故此传递函数为RCs R R s U s U i 4)4()()(110+-= 2-3 试求图2-T-3中以电枢电压a u 为输⼊量,以电动机的转⾓θ为输出量的微分⽅程式和传递函数。
基于Matlab的高阶阶系统单位阶跃响应主导极点分析1. 引言在控制系统的设计和分析中,经常会遇到高阶阶系统。
高阶阶系统的单位阶跃响应主导极点分析是一项重要的任务。
通过分析系统的主导极点,可以对系统的动态性能进行评估,并在必要时进行控制器的调整和优化。
Matlab是一种强大的数值计算和编程环境,支持矩阵计算、绘图和数据分析等功能。
本文将介绍在Matlab中对高阶阶系统进行单位阶跃响应主导极点分析的方法和步骤。
2. 单位阶跃响应主导极点分析方法单位阶跃响应主导极点分析是通过分析系统的单位阶跃响应以及极点的位置来评估系统的动态特性。
主导极点是决定系统响应快慢的关键因素。
在Matlab中,可以使用控制系统工具箱中的函数来进行单位阶跃响应主导极点分析。
以下是一套基本的步骤:1.定义系统传递函数:在Matlab中,可以使用tf函数定义系统的传递函数。
例如,对于一个二阶系统,可以定义如下:sys = tf([b0 b1 b2], [a0 a1 a2]);其中b0, b1, b2和a0, a1, a2分别是系统的分子和分母多项式的系数。
2.绘制单位阶跃响应曲线:使用step函数可以绘制系统的单位阶跃响应曲线。
例如:step(sys);该命令将绘制系统的单位阶跃响应曲线。
3.分析主导极点:观察单位阶跃响应曲线,可以确定系统的主导极点。
主导极点是响应曲线上最快的极点。
4.评估系统的动态性能:根据主导极点的位置和单位阶跃响应曲线的特点,可以评估系统的动态性能。
例如,主导极点越远离虚轴,系统的动态响应速度越快。
5.进行控制器调整和优化:根据动态性能评估结果,可以对控制器进行调整和优化,以满足设计要求。
3. 实例分析为了更好地理解基于Matlab的高阶阶系统单位阶跃响应主导极点分析的方法,我们将介绍一个实例。
假设有一个三阶系统,传递函数为:G(s) = (s+2) / ((s+1)(s+3))我们可以在Matlab中进行如下操作:b = [12];a = conv([11], [13]);sys = tf(b, a);step(sys);运行上述代码后,将绘制出系统的单位阶跃响应曲线。
课程设计报告( 2013—2014年度第一学期)名称:自动控制理论题目:三阶系统的分析与校正院系:控计学院班级:自动化1105学号:学生姓名:指导教师:袁桂丽设计周数:1周成绩:日期:2014年1月9目录一、《自动控制理论A》课程设计任务书 (1)二、《自动控制理论A》课程设计 (3)三、设计正文 (4)五课程设计心得 (21)六参考文献 (22)一、《自动控制理论A 》课程设计任务书1. 目的与要求本次课程设计是在学完自动控制理论课程后进行的。
详细介绍MATLAB 的控制系统工具箱的用法以及SIMULINK 仿真软件,使学生能够应用MATLAB 对自动控制理论课程所学的内容进行深层次的分析和研究,能用MATLAB 解决复杂的自动控制系统的分析和设计题目;能用MATLAB 设计控制系统以满足具体的性能指标; 能灵活应用MATLAB 的CONTROL SYSTEM 工具箱和SIMULINK 仿真软件,分析系统的性能,进行控制系统设计。
2. 主要内容简要介绍控制系统理论的基本概念和基本方法,并介绍MATLAB 软件的基本知识。
包括MATLAB 的基本操作命令、数据结构、矩阵运算、编程算法等; 简要介绍MATLAB 的控制系统工具箱的用法。
包括控制系统的模型及相互转换、时域分析方法、频域分析方法等应用MATLAB 工具箱进行分析研究,增强理解;简要介绍SIMULINK 仿真软件,介绍SIMULINK 的应用方法及各种强大功能,应用SIMULINK 对系统进行仿真研究;简要介绍控制系统分析与设计所必须的工具箱函数,包括模型建立、模型变换、模型简化、模型实现、模型特性、方程求解、时域响应、频域响应、根轨迹等各个方面。
1. 在掌握控制系统基本理论和控制系统工具箱函数的基础上,利用MATLAB 及其工具箱函数来解决所给控制系统的分析与设计问题,并上机实验;撰写课程设计报告。
2. 设计任务2.1 自选单位负反馈系统,开环传递函数)s (G 0[一个三阶或以上系统]。
MATLAB 分析1 MATLAB 函数编程1.1 传递函数的整理已知三阶系统的闭环传递函数为)64.08.0)(11(7.2)(2+++=s s s as G ,整理成一般式得G(s)=as a s a s a64.0)8.064.0()8.0(7.223+++++,其中a 为未知参数。
从一般式可以看出系统没有零点,有三个极点。
(其中一个实数极点和一对共轭复数极点)1.2 动态性能指标的定义上升时间r t :指响应从终值10%上升到终值90%所需的时间;对于有振荡 系统,亦可定义为响应从零第一次上升到终值所需的时间。
上升时间是系统 响应速度的一种度量。
上升时间越短,响应速度越快。
峰值时间p t :指响应超过其终值到达第一个峰值所需的时间。
调节时间s t :指响应到达并保持在终值±5%内所需的最短时间。
超调量 σ%:指响应的最大偏离量h(p t )与终值h(∞)的差与终值h(∞)比的百分数,即σ%=)()()(∞∞-h h t h p ×100%若h(p t )<h(∞),则响应无超调。
超调量亦称为最大超调量,或百分比超调量。
在实际应用中,常用的动态性能指标多为上升时间、调节时间和超调量。
通常,用r t 或p t 评价系统的响应速度;用σ%评价系统的阻尼程度;而s t 是同时反映响应速度和阻尼程度的综合性能指标。
应当指出,除简单的一、二阶系统外,要精确确定这些动态性能指标的解析表达式是很困难的。
1.3 MATLAB 函数编程求系统的动态性能根据三阶系统闭环传递函数的一般表达式,在MATLAB 的Editor 中输入程序: num=[2.7a]den=[1,0.8+a,0.64+a,0.64a] t=0:0.01:20 step(num,den,t)[y,x,t]=step(num,den,t) %求单位阶跃响应 maxy=max(y) %响应的最大偏移量 yss=y(length(t)) %响应的终值 pos=100*(maxy-yss)/yss %求超调量 for i=1:2001if y(i)==maxy n=i;end endtp=(n-1)*0.01 %求峰值时间 y1=1.05*yss y2=0.95*yss i=2001 while i>0 i=i-1if y(i)>=y1|y(i)<=y2;m=i;break end endts=(m-1)*0.01 %求调节时间 title('单位阶跃响应') grid2 三阶系统闭环主导极点及其动态性能分析2.1 三阶系统的近似分析根据主导极点的概念,可知该三阶系统具有一对共轭复数主导极点1s = -0.4±0.693j,因此该三阶系统可近似成如下的二阶系统:G(s)≈64.08.07.22++s s再利用MATLAB 的零极点绘图命令pzmap ,可得该二阶系统的零、极点分布,在 Editor 里面编写如下程序:H=tf([2.7],[1 0.8 0.64]);grid pzmap(H);得到零极点分布图如下:2.2 编程求解动态性能指标根据以上求解动态性能的MATLAB函数程序,在编辑器里面编写以下程序,得到近似二阶系统的单位阶跃响应和动态性能指标。
目录1 绘制随根轨迹 (2)1.1 根轨迹绘制步骤 .................................................................................................................... 2 1.2 用MA TLAB 绘制随根轨迹 . (2)2 不同条件下K 值的求取 (3)2.1 -6为闭环系统的一个极点时 ................................................................................................ 3 2.2取主导极点阻尼比为0.7 . (4)3 线性系统的稳态误差计算及原理 (5)3.1 稳态误差的计算 .................................................................................................................... 5 3.2 输入信号为22)(1)(t t t t r ++=时的稳态误差 (7)4 用Matlab 绘制单位阶跃相应曲线..................................... 7 5 绘制Bode 图和Nyquist 曲线.. (7)5.1 BODE 图的绘制 ..................................................................................................................... 7 5.2 Nyquist 曲线的绘制 (8)6 幅值裕度和相角裕度................................................ 9 7 系统加入非线性环节的稳定性分析 (9)7.1 非线性环节的描述函数的求取 ............................................................................................ 9 7.2 负倒描述函数的求取 .......................................................................................................... 11 7.3 系统稳定性的判据及原理 .................................................................................................. 12 7.4 系统稳定性判据的应用 (13)小结与体会......................................................... 14 参考文献.. (15)三阶系统综合分析与设计1 绘制随根轨迹某单位反馈系统结构图如图1-1所示:)4)(2(++s s s K)(s R )(s C -图1-1 单位反馈系统结构图系统传递函数=)(s G )4)(2(++s s s k1.1 根轨迹绘制步骤由图1-1知1)确定实轴上的根轨迹。
目录摘要1 1 设计容11.1 设计题目1 1.2 设计任务12绘制三阶系统的根轨迹22.1 常规方法绘制根轨迹2 2.2用MATLAB 绘制根轨迹4 3 不同条件下K 的取值53.1 当-8为闭环系统的一个极点时,K 的取值5 3.2 主导极点阻尼比为0.7时的k 值5 4 求系统的稳态误差64.1 位置误差系数7 4.2 速度误差系数7 4.3 加速度误差系数84.4 输入信号为25.2)(1)(t t t t r ++=时的稳态误差85 绘制单位阶跃响应曲线96 频域特性分析96.1绘制Bode 图和Nyquist 曲线10 6.2相角裕度和幅值裕度12 7 加入非线性环节判断稳定性137.1 求死区特性环节的描述函数137.2 根据负倒描述函数和Nyquist 图判断系统的稳定性14 8 设计体会15 参考文献 (17)摘要三阶系统是以三级微分方程为运动方程的控制系统。
在控制工程中,三阶系统非常普遍,其动态性能指标的确定是比较复杂。
在工程上常采用闭环主导极点的概念对三阶系统进行近似分析,或直接用MATLAB软件进行高阶系统分析。
在课程设计中,要掌握用MATLAB绘制闭环系统根轨迹和系统响应曲线,用系统的闭环主导极点来估算三系统的动态性能,以及在比较点与开环传递函数之间加一个非线性环节判断其稳定性。
1 设计容1.1 设计题目三阶系统的综合分析和设计初始条件:某单位反馈系统结构图如图1-1所示:图1-1 图1-21.2 设计任务要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、试绘制随根轨迹2、当-8为闭环系统的一个极点时,K=?3、求取主导极点阻尼比为0.7时的K 值(以下K 取这个值)4、分别求取位置误差系数、速度误差系数、加速度误差系数及输入信号为25.2)(1)(t t t t r ++=单位阶跃信号、斜坡信号及单位加速度信号时的稳态误差5、用Matlab 绘制单位阶跃相应曲线6、绘制Bode 图和Nyquist 曲线,求取幅值裕度和相角裕度7、如在比较点与开环传递函数之间加1个死区非线性环节,如图1-2所示,其中2,10==k e ,试求取非线性环节的描述函数,并根据负倒描述函数和Nyquist 图判断系统的稳定性8、认真撰写课程设计报告。