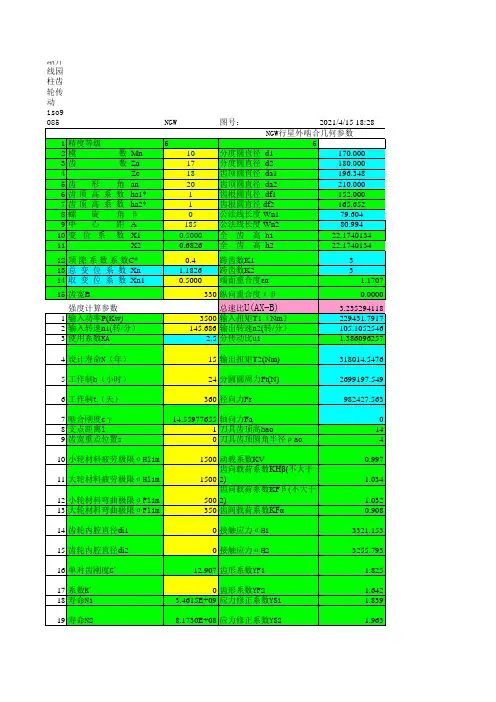
角变位行星齿轮几何尺寸的计算
- 格式:pdf
- 大小:129.22 KB
- 文档页数:3
变位齿轮参数计算公式引言变位齿轮是一种常用的齿轮传动装置,可以实现不等速传动。
在实际设计和计算中,需要了解和确定变位齿轮的参数,以便满足传动需求。
本文将介绍一些常用的变位齿轮参数计算公式,帮助读者了解和计算变位齿轮的相关参数。
1. 转速比计算公式对于一个变位齿轮传动系统,转速比是一个重要的参数,表示两轴之间的转速比例关系。
通常以N1、N2分别表示第一齿轮的转速和第二齿轮的转速。
变位齿轮的转速比计算公式如下:转速比 = (N2 - N1) / N12. 锥齿轮的齿数计算公式对于一对变位齿轮中的锥齿轮,其齿数计算公式如下:Z = (Z1 * m1) / m2其中,Z为锥齿轮的齿数,Z1为直齿轮的齿数,m1为直齿轮的模数,m2为锥齿轮的模数。
3. 螺旋角计算公式螺旋角是变位齿轮的一个重要参数,表示齿轮齿线沿轴向的倾斜角度。
对于一对变位齿轮中的螺旋齿轮,其螺旋角的计算公式如下:β = atan(tan(α) - (m2 * (Z2 - Z1)) / (2 * π * a))其中,β为螺旋角,α为压力角,m2为齿数为Z2的螺旋齿轮的模数,Z1为另一齿轮的齿数,a为啮合齿轮的轴向分度圆半径。
4. 齿面距计算公式齿面距是变位齿轮的另一个重要参数,表示两个啮合齿轮齿面上同一点之间的距离。
对于一对变位齿轮中的两个螺旋齿轮,其齿面距的计算公式如下:h = m2 * b / cos(α)其中,h为齿面距,m2为螺旋齿轮的模数,b为螺旋齿轮的齿宽,α为压力角。
5. 压力角计算公式压力角是变位齿轮设计中的一个重要参数,表示齿形曲线的锋角与轴线的夹角。
通常使用以下计算公式得到压力角的值:cos(α) = (Z1 + Z2) / (2 * m2 * a)其中,α为压力角,Z1和Z2分别为两个啮合齿轮的齿数,m2为螺旋齿轮的模数,a为啮合齿轮的轴向分度圆半径。
结论本文介绍了几个重要的变位齿轮参数计算公式,包括转速比、锥齿轮的齿数、螺旋角、齿面距和压力角的计算公式。
齿轮的计算公式表一、齿轮的基本概念齿轮是一种常用的机械传动装置,由齿轮和齿轮相互啮合传递力和运动的装置。
齿轮通常由两个或多个相互啮合的轮齿组成,通过齿面的啮合传递运动和力量。
二、齿轮的模数(Module)齿轮的模数是指每个齿轮齿数除以齿轮直径的比值。
模数的单位是毫米(mm)。
计算公式为:模数=齿轮齿数/齿轮直径。
三、齿轮的齿数(Number of Teeth)齿轮的齿数是指齿轮上的齿的数量。
齿数决定了齿轮的大小和传动比。
计算公式为:齿轮齿数=齿轮直径×π/模数。
四、齿轮的变位系数(Shift Coefficient)齿轮的变位系数是指齿轮齿顶高度与模数之比。
变位系数的大小决定了齿轮齿形的变化。
计算公式为:变位系数=齿轮齿顶高度/模数。
五、齿轮的压力角(Pressure Angle)齿轮的压力角是指齿轮齿廓与径向线的夹角。
压力角的大小会影响齿轮传动的强度和平稳性。
常用的压力角有20度和14.5度两种。
六、齿轮的齿顶高度(Addendum Height)齿轮的齿顶高度是指齿轮齿顶到齿轮基圆的距离。
齿顶高度的大小决定了齿轮齿形的形状和强度。
计算公式为:齿顶高度=模数+齿轮齿顶圆角半径。
七、齿轮的齿根高度(Dedendum Height)齿轮的齿根高度是指齿轮齿根到齿轮基圆的距离。
齿根高度的大小决定了齿轮齿形的形状和强度。
计算公式为:齿根高度=1.25×模数。
八、齿轮的齿宽(Face Width)齿轮的齿宽是指齿轮齿的宽度。
齿宽的大小决定了齿轮的强度和传动能力。
计算公式为:齿宽=传动功率/齿轮转速。
九、齿轮的齿廓曲线齿轮的齿廓曲线是指齿轮齿的截面曲线。
常见的齿廓曲线有圆弧齿廓、渐开线齿廓和直线齿廓。
不同的齿廓曲线适用于不同的传动方式和工作条件。
十、齿轮的传动比(Gear Ratio)齿轮的传动比是指驱动齿轮的转速与被驱动齿轮的转速之比。
传动比决定了齿轮传动的速度和力量变化。
计算公式为:传动比=驱动齿轮齿数/被驱动齿轮齿数。
传动型式高变位1、 太阳轮负变位,行星轮和内齿轮正变位。
即:-x A =x C =x Bx A 和x C 按手册图14-5-4及图14-5-5确定,也可按第一章的方法选择变位方式与变位系在渐开线行星齿轮传动中,合理采用变位齿轮可以获得如载能力,在保证所需传动比前提下得到合理的中心距、在保证装配及同心等条件下使齿数的选择具有较性。
变位齿轮有高变位和角变位,两者在渐开线行星齿轮传动中都有应用。
高变位主要用于消除根切和使轮的滑动比及弯曲强度大致相等。
角变位主要用于更灵活地选择齿数,拼凑中心距,改善啮合特性及提力。
由于高变位的应用在某些情况下受到限制,因此角变位在渐开线行星齿轮传动中应用更为广泛。
常用行星齿轮传动变位方式NGW 1、 太阳轮正变位,行星轮和内齿轮负变位。
即:x A =-x C =-x Bx A 和x C 按手册图14-5-4及图14-5-5确定,也可按第1章的方法选择4<B AX i 4≥B AX i角变位1、不等角变位应用较广。
通常使啮合角在下列范围外啮合:α'AC =24º~26º30'(个别甚至达29º50')内啮合:α'CB =17º30'~21º此法是在z A 和z B 不变,而将z C 减少1~2齿的情况下实现的。
这样可以显著提高外啮合的承载能力。
根据初选齿数,利用图14-5-4预计啮合角大小(初定啮合角于上述范围内);然后计算出x ∑AC 、x ∑CB ,最后按图14-5-5或第一章的方法分配变位系数2、等角变位各齿轮齿数关系不变,即:z A +z C =z B -z C变位系数之间的关系为:x B =2x C +x A变位系数大小以齿轮不产生根切为准。
总变位系数不能过大,否则影响内齿轮弯曲强度。
通常取啮合角α'AC =α'CB =22º对于直齿轮传动,当z A <z C 时推荐取 x A =x C =0.53、当传动比 时,推荐取α'AC =24º~25º,α'CB =20º,即外啮合为角变位,内啮合为高变位。
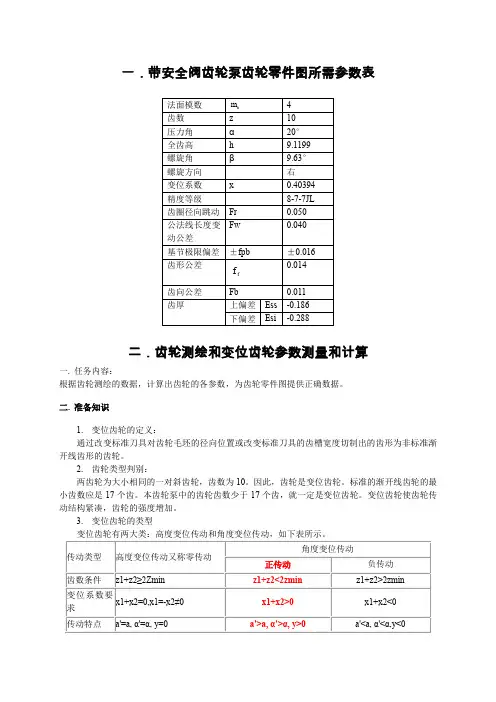
变位齿轮几何尺寸计算
变位齿轮是齿轮传动系统中常用的一种齿轮,主要用于传递旋转运动和扭矩。
其特点是在齿轮齿条的侧面具有斜面,能够实现平滑传动和减小齿轮传动时的冲击和噪声。
在设计变位齿轮时,需要进行几何尺寸的计算来保证齿轮的运转性能。
变位齿轮的几何尺寸计算主要包括齿轮的模数、齿数、齿顶高和齿根深等参数。
下面将详细介绍每个参数的计算方法。
1.模数(m)的计算:
模数是齿轮齿条的基本尺寸,它表示齿轮齿条的大小。
模数的计算根据传动所需的扭矩和功率来确定,通常使用公式:
m=K∛(T/P)
其中,m为模数,K为系数(一般取20),T为传动所需扭矩,P为传动功率。
2.齿数(z)的计算:
齿数表示齿轮上的齿的数量。
齿数的计算根据传动比和模数来确定,一般使用公式:
z=m×i
其中,i为传动比。
3.齿顶高(h_a)和齿根深(h_f)的计算:
齿顶高表示齿轮齿条的最高点到齿顶的距离,齿根深表示齿轮齿条的最低点到齿底的距离。
它们的计算可以使用公式:
h_a=1.25×m
h_f=1.35×m
上述是变位齿轮几何尺寸计算的基本方法,但实际设计中还需要考虑齿轮的齿向角、齿轮间的啮合角、齿轮侧隙等因素。
此外,变位齿轮的几何尺寸还需要满足一些额外的要求,如齿轮的强度和刚度等。
关于变位齿轮几何尺寸计算的更详细内容可以参考相关的齿轮设计手册和专业参考书籍。
变位齿轮参数及计算齿轮是一种常用的传动装置,主要用于将转速和力量传递给其他机械设备。
变位齿轮是一种特殊类型的齿轮,其主要功能是改变传动比和方向。
1. 齿轮模数(Module):齿轮模数是反映齿轮尺寸的一个重要参数。
它定义了齿轮上每毫米的齿数。
齿轮模数的选择取决于传动的要求和设计规范。
2. 公法线半径(Pitch Radius):公法线半径是从齿轮齿面中心到齿廓处的距离。
它表示了齿轮大小的一个重要指标。
3. 夹角(Pressure Angle):夹角是齿轮齿廓线和法线之间的夹角。
常见的夹角有20度和14.5度两种。
夹角的选择取决于齿轮的使用条件和设计要求。
变位齿轮的计算方法主要包括齿数计算、齿廓绘制和传动比计算。
1.齿数计算:齿数计算是确定变位齿轮的基本参数之一、可以使用下列公式进行计算:Z1=N1/mZ2=N2/mZt=Z1+Z2其中,Z1和Z2分别为小齿轮和大齿轮的齿数,N1和N2为小齿轮和大齿轮的转速,m为齿轮模数,Zt为总齿数。
2.齿廓绘制:变位齿轮的齿廓是根据齿轮参数和齿轮轴心位置绘制出来的。
可以使用软件进行计算和绘制,也可以使用手动计算和绘图方法。
绘制齿廓时需要考虑齿轮的齿顶高度、齿根高度和齿廓曲线。
3.传动比计算:传动比是指变位齿轮传动时输出轴的转速与输入轴的转速之比。
可以用下列公式进行计算:i=Z2/Z1其中,i为传动比,Z1和Z2分别为小齿轮和大齿轮的齿数。
通过以上参数和计算步骤,可以确定变位齿轮的设计参数和计算结果。
齿轮的设计和计算是齿轮传动工程中的重要内容,合理的设计和计算可以保证齿轮传动的安全和可靠性。
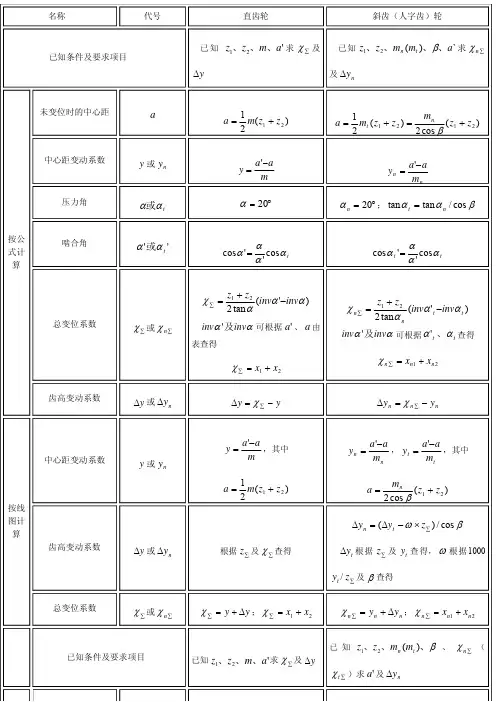
(完整版)变位齿轮的计算⽅法变位齿轮的计算⽅法1 变位齿轮的功⽤及变位系数变位齿轮具有以下功⽤:(1)避免根切;(2)提⾼齿⾯的接触强度和弯曲强度;(3)提⾼齿⾯的抗胶合和耐磨损能⼒;(4)修复旧齿轮;(5)配凑中⼼距。
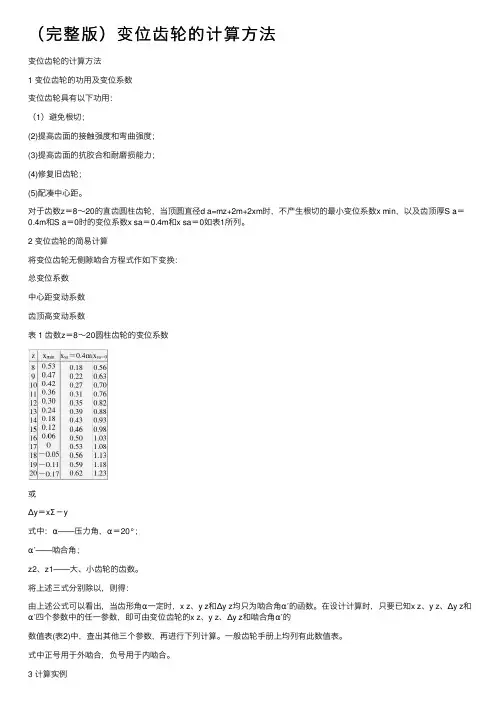
对于齿数z=8~20的直齿圆柱齿轮,当顶圆直径d a=mz+2m+2xm时,不产⽣根切的最⼩变位系数x min,以及齿顶厚S a=0.4m和S a=0时的变位系数x sa=0.4m和x sa=0如表1所列。
2 变位齿轮的简易计算将变位齿轮⽆侧隙啮合⽅程式作如下变换:总变位系数中⼼距变动系数齿顶⾼变动系数表 1 齿数z=8~20圆柱齿轮的变位系数或Δy=xΣ-y式中:α——压⼒⾓,α=20°;α′——啮合⾓;z2、z1——⼤、⼩齿轮的齿数。
将上述三式分别除以,则得:由上述公式可以看出,当齿形⾓α⼀定时,x z、y z和Δy z均只为啮合⾓α′的函数。
在设计计算时,只要已知x z、y z、Δy z和α′四个参数中的任⼀参数,即可由变位齿轮的x z、y z、Δy z和啮合⾓α′的数值表(表2)中,查出其他三个参数,再进⾏下列计算。
⼀般齿轮⼿册上均列有此数值表。
式中正号⽤于外啮合,负号⽤于内啮合。
3 计算实例例1:已知⼀对外啮合变位直齿轮,齿数z1=18,z2=32,压⼒⾓α=20°,啮合⾓α′=22°18′,试确定总变位系数xΣ、中⼼距变动系数y及齿顶⾼变动系数Δy。
解:根据α′=22°18′查表2,得:x z=0.01653,y z=0.01565,Δy z=0.00088由此得:例2:已知⼀直齿内啮合变位齿轮副,齿数z1=19,z2=64,α=20°,啮合⾓α′=21°18′。
求xΣ、y及Δy。
解:根据α′=21°18′查表2,得:x z=0.00886,y z=0.00859,Δy z=0.00027。
由此得:其他⼏何尺⼨计算按常规计算进⾏。
变位齿轮几何参数计算变位齿轮是一种常用的传动装置,具有传动平稳、载荷分布均匀、传动效率高等特点。
变位齿轮的几何参数计算是设计变位齿轮的重要工作之一,本文将对变位齿轮的几何参数计算进行详细介绍。
变位齿轮的几何参数包括齿数、模数、压力角、分度圆直径等。
这些参数的计算与变位齿轮的几何形状密切相关,下面将逐一介绍。
首先,齿数的计算是变位齿轮设计的起点。
齿数通常由设计要求决定,可以根据传动比和中心距来计算。
传动比是输入齿轮的齿数除以输出齿轮的齿数,而中心距是两个齿轮的分度圆半径之和。
其次,模数的计算是变位齿轮设计的关键。
模数决定了齿轮齿廓的几何形状,模数越大,齿轮的模坯尺寸越大,强度也越高。
模数的计算可以根据齿宽和齿数来确定,一般使用标准模数进行设计。
压力角的计算是变位齿轮设计的重要步骤。
压力角是齿轮齿面与齿轮齿轴的夹角,它决定了齿轮的齿廓形状。
压力角的选择通常是根据机械传动的要求和工作环境来确定。
分度圆直径的计算是变位齿轮设计的一项基本工作。
分度圆直径是齿轮齿数和模数的函数,它决定了齿轮齿廓的几何形状和尺寸。
分度圆直径的计算可以根据齿数、模数和压力角来进行。
除了上述几何参数,变位齿轮的几何计算还包括齿厚、齿顶高、齿根高、齿侧间隙等参数的计算。
齿厚是齿轮齿宽与模数的乘积,齿顶高是齿轮齿顶与齿轮齿顶圆的距离,齿根高是齿轮齿根与齿轮齿根圆的距离,齿侧间隙是齿轮齿根和齿槽齿根之间的距离。
变位齿轮的几何参数计算可以采用计算机辅助设计(CAD)软件进行,也可以采用数学公式和手动计算的方法进行。
无论采用何种方法,都需要准确的输入设计参数和计算公式,以确保变位齿轮的几何参数计算结果的正确性。
总之,变位齿轮的几何参数计算是设计变位齿轮的重要环节,必须准确计算各个参数,以满足工程要求和使用条件。
只有在准确计算和合理选择变位齿轮的几何参数的基础上,才能设计出性能可靠的变位齿轮传动装置。
变位齿轮几何参数计算变位齿轮是一种能够实现传动的机械装置,其特点是能够传递转矩和变速的功能。
变位齿轮几何参数计算是设计变位齿轮传动的重要步骤之一,本文将对变位齿轮几何参数计算进行详细介绍。
主要内容涵盖变位齿轮的基本概念、几何参数的计算方法以及相关的应用举例。
一、变位齿轮的基本概念变位齿轮是由一对轴平行并且具有相同模数的齿轮组成的,其中一只齿轮的齿数是固定不变的,称为定齿轮;另一只齿轮的齿数是可变的,称为动齿轮。
变位齿轮传动通过改变动齿轮的齿数来实现变速。
二、几何参数的计算方法1.变位齿轮的齿数计算变位齿轮的齿数计算需要确定定齿轮的模数和动齿轮的模数变化量。
固定的定齿轮齿数N1可根据传动比和任意选定的动齿轮齿数N2计算得到。
变位齿轮的齿轮传动比等于定齿轮的齿数除以动齿轮的齿数,即传动比i=N1/N22.变位齿轮的齿廓计算变位齿轮的齿廓计算需要根据变位齿轮的齿数、螺旋角和压力角来确定。
变位齿轮的齿形是沿齿轮直齿廓方向逐渐变化的。
在变位齿轮的齿廓计算中,首先需要确定变位齿轮的基圆半径和齿顶高,然后根据基圆半径和齿顶高计算齿根高和齿根圆半径。
最后,根据齿根高、齿根圆半径和变位齿轮的螺旋角、压力角来计算出齿廓。
三、相关应用举例1.变位齿轮传动装置的设计根据给定的传动比和传动功率,可以利用变位齿轮几何参数计算的结果设计出适合的变位齿轮传动装置,以实现所需的变速和传动效果。
2.变位齿轮传动的优化通过调整变位齿轮的几何参数,如齿数、齿廓等,可以优化传动装置的性能,比如降低传动中的噪音和振动,提高传动效率等。
3.变位齿轮的制造利用变位齿轮几何参数计算的结果可以指导齿轮的加工制造,保证制造出的变位齿轮符合设计要求。
总结:变位齿轮几何参数计算是设计变位齿轮传动的基本步骤之一,通过计算齿数和齿廓等参数可以实现变位齿轮传动的设计、优化和制造。
变位齿轮传动在机械装置中具有重要的应用和发展前景,对于提高传动效果和性能具有重要意义。
变位螺旋伞齿轮几何尺寸计算π 3.141592654大端模数m=d1/Z1=d2/Z2m 1.5齿型角α20齿数 小齿轮Z115大齿轮Z256传动比i=Z2/Z1i 3.733333333分度圆直径d1=mZ1d122.5d2=id1d284节锥角 δ1=arctanZ1/Z2δ114.99507913δ2=90-δ1δ275.00492087锥距 R=d1/2sinδ1=d2/2sinδ2R43.48059912齿宽 b=ΨR,Ψ=0.3 与b13.04417974b=10m,取小值b15齿距 P=πm P 4.71238898工作齿高h′=1.7m;(Z1<12查表)h′ 2.55齿全高 h=1.950m(m≤1.3mm);(Z1<12查表)h 2.925h=1.888m(m>1.3mm);(Z1<12查表)h 2.832齿顶高 ha1=h′-ha2ha1 1.818027742ha2=0.46m+0.39m/(Z2/Z1)(Z2/Z1);(Z1<1ha20.731972258m>1.3mm齿根高 hf1=h-ha1hf1 1.013972258h=1.888m(m>1.3mm) hf2=h-ha2hf2 2.100027742h=1.888m(m>1.3mm)顶隙 c=h-h′c0.282h=1.888m(m>1.3mm)齿根角 θf1=arctanhf1/Rθf1 1.335901622θf2=arctanhf2/Rθf2 2.765125152齿顶角 θa1=arctanha1/R;(正常收缩齿)θa1 2.394278808θa2=arctanha2/R;(正常收缩齿)θa20.964452211θa1=arctanhf2/R;(等齿顶隙)θa1 2.765125152θa2=arctanhf1/R;(等齿顶隙)θa2 1.335901622顶圆锥角δa1=δ1+θa1;(正常收缩齿)δa117.38935794δa2=δ2+θa2;(正常收缩齿)δa275.96937308δa1=δ1+θf2;(等齿顶隙)δa117.76020428δa2=δ2+θf1;(等齿顶隙)δa276.34082249根圆锥角δf1=δ1-θf1δf113.65917751δf2=δ2-θf2δf272.23979572齿顶圆直径da1=d1+2ha1cosδ1da126.01224071da2=d2+2ha2cosδ2da284.37877527冠顶距 Ak1=d2/2-ha1*sinδ1Ak141.52961062Ak2=d1/2-ha2*sinδ2Ak210.54295282m≤1.3mm齿根高 hf1=h-ha1hf1 1.106972258h=1.950m(m≤1.3mm) hf2=h-ha2hf2 2.193027742h=1.950m(m≤1.3mm)顶隙 c=h-h′c0.375h=1.950m(m≤1.3mm)齿根角 θf1=arctanhf1/Rθf1 1.458377802θf2=arctanhf2/Rθf2 2.887376243齿顶角 θa1=arctanha1/R;(正常收缩齿)θa1 2.394278808θa2=arctanha2/R;(正常收缩齿)θa20.964452211θa1=arctanhf2/R;(等齿顶隙)θa1 2.887376243θa2=arctanhf1/R;(等齿顶隙)θa2 1.458377802顶圆锥角δa1=δ1+θa1;(正常收缩齿)δa117.38935794δa2=δ2+θa2;(正常收缩齿)δa275.96937308δa1=δ1+θf2;(等齿顶隙)δa117.88245537δa2=δ2+θf1;(等齿顶隙)δa276.46329867根圆锥角δf1=δ1-θf1δf113.53670133δf2=δ2-θf2δf272.11754463齿顶圆直径da1=d1+2ha1cosδ1da126.01224071da2=d2+2ha2cosδ2da284.51747217冠顶距 Ak1=d2/2-ha1*sinδ1Ak141.52961062Ak2=d1/2-ha2*sinδ2Ak210.54295282。
变位齿轮齿顶圆齿根圆直径计算公式变位齿轮是一种常见的传动装置,用于传递动力和扭矩。
在设计和制造变位齿轮时,计算齿顶圆直径和齿根圆直径是非常重要的。
本文将介绍如何计算变位齿轮的齿顶圆直径和齿根圆直径的公式和方法。
变位齿轮的齿顶圆直径和齿根圆直径是通过模数来计算的。
模数是变位齿轮齿数与齿轮直径的比值。
齿顶圆直径和齿根圆直径的计算公式如下:齿顶圆直径 = (齿数+ 2) × 模数齿根圆直径 = (齿数+ 2) × 模数 - 2 × 齿高其中,齿数是指变位齿轮的齿数,齿高是变位齿轮齿槽的深度。
通过这两个公式,可以准确地计算出变位齿轮的齿顶圆直径和齿根圆直径。
在实际应用中,计算齿顶圆直径和齿根圆直径前,需要先确定变位齿轮的模数、齿数和齿高。
模数的选择需要考虑到变位齿轮的传动功率、转速和齿轮材料等因素。
齿数的确定通常根据设计要求和装配空间来确定。
齿高的选择需要满足变位齿轮的强度和传动效率要求。
在计算齿顶圆直径和齿根圆直径时,需要注意以下几点。
首先,齿数和齿高的单位必须一致,通常为毫米。
其次,计算结果应保留足够的有效数字,以确保计算的准确性。
最后,齿高的计算需要根据变位齿轮的齿型来确定,常见的齿型有直齿、渐开线齿和圆弧齿等。
通过计算齿顶圆直径和齿根圆直径,可以确定变位齿轮的几何尺寸。
这些尺寸对于变位齿轮的制造、装配和使用非常重要。
在制造过程中,需要根据计算结果来确定齿轮的加工工艺和机床设备。
在装配和使用过程中,需要根据齿顶圆直径和齿根圆直径来确定齿轮的配合间隙和传动效率。
计算变位齿轮的齿顶圆直径和齿根圆直径是非常重要的工作。
通过正确使用相应的公式和方法,可以准确地计算出变位齿轮的几何尺寸。
这对于变位齿轮的设计、制造和使用都具有重要意义。
希望本文能对读者理解和应用变位齿轮的计算公式有所帮助。
齿轮计算公式范文齿轮的计算公式主要包括齿轮的几何参数计算公式和齿轮的传动参数计算公式两部分。
一、齿轮的几何参数计算公式:1.齿轮的模数(m)计算公式:m=d/z其中,m为齿轮的模数,d为齿轮的分度圆直径,z为齿数。
2.齿轮的分度圆直径(d)计算公式:d=m*z其中,d为齿轮的分度圆直径,m为齿轮的模数,z为齿数。
3.齿轮的齿宽(b)计算公式:b=K*m其中,b为齿轮的齿宽,K为齿宽系数,m为齿轮的模数。
4.齿轮的螺旋角(γ)计算公式:γ = atan(tan(α)/cosβ)其中,γ为齿轮的螺旋角,α为齿侧角,β为齿轮的压力角。
5.齿轮的模位角(θm)计算公式:θm = atan(tanβ/cosγ)其中,θm为齿轮的模位角,β为齿轮的压力角,γ为齿轮的螺旋角。
6. 齿轮的圆椎距(ha)计算公式:ha = m*(cosα - cosβ)其中,ha为齿轮的圆椎距,m为齿轮的模数,α为齿侧角,β为齿轮的压力角。
7. 齿轮的齿顶高(hf)计算公式:hf = 1.25*m其中,hf为齿轮的齿顶高,m为齿轮的模数。
8. 齿轮的齿根高(hg)计算公式:hg = 1.35*m其中,hg为齿轮的齿根高,m为齿轮的模数。
9. 齿轮的齿顶圆直径(da)计算公式:da = d + 2*hf其中,da为齿轮的齿顶圆直径,d为齿轮的分度圆直径,hf为齿轮的齿顶高。
10. 齿轮的齿根圆直径(db)计算公式:db = d - 2*hg其中,db为齿轮的齿根圆直径,d为齿轮的分度圆直径,hg为齿轮的齿根高。
二、齿轮的传动参数计算公式:1.齿轮的传动比(i)计算公式:i=z2/z1其中,i为齿轮的传动比,z1为主动齿轮的齿数,z2为从动齿轮的齿数。
2.齿轮的转速比(ω)计算公式:ω=n2/n1其中,ω为齿轮的转速比,n1为主动齿轮的转速,n2为从动齿轮的转速。
3.齿轮的齿垂度计算公式:ε=[(c1-c2)/m]/z其中,ε为齿轮的齿垂度,c1为主动齿轮的垂距,c2为从动齿轮的垂距,m为齿轮的模数,z为齿数。