用遗传算法实现PID参数整定
- 格式:pdf
- 大小:289.43 KB
- 文档页数:4
福建电脑2014年第2期课题来源:徐州工程学院“江苏省大学生创新创业训练计划项目(创新类)”,编号XCX13095,名称基于遗传算法的PID 参数整定。
0.引言PID 控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高,被广泛应用于过程控制和运动控制中,尤其适用于可建立精确数学模型的确定性控制系统中。
在PID 控制中,控制效果的好坏完全取决与PID 参数的整定与优化。
目前,PID 参数整定与优化方法有很多,如Z-N 法、继电型自整定法、最优设计法及梯度法、单纯形法。
前几种整定方法带有经验性并且不是最优解,梯度法和单纯形法极易陷入局部最优点。
因此可采用遗传算法进行参数寻优,该方法是一种不需要任何初始信息并可以寻求全局最优解的高效优化组合方法。
1.遗传算法遗传算法,是由美国的J.H.Holland 提出的一种模仿生物进化过程的最优化方法。
是以自然选择与遗传理论为基础,将生物进化过程中适者生存与群体内部染色体的随机信息交换机制相结合的全局搜索算法。
近年来,人们把它应用于学习、优化、自适应等问题中。
在优化问题中,遗传算法过程简述如下。
首先在解空间中取一群点(基因群),作为遗传开始的第一代。
每个点(基因)用一个二进制的数字串表示,其优劣程度用一个适应度函数来衡量。
适应度函数值小,表明那个点(基因)好,容易在遗传中生存下去。
在向下一代遗传演变中,前一代中的每个数字串根据由其适应度函数值决定的概率被复制到配对池中。
好的数字串以高的概率被复制下来,劣的数字串被淘汰掉。
然后将配对池中的数字串任意配对,并对每一对数字串进行交叉操作,产生新的子孙(数字串)。
最后对新的数字串的某一位进行变异。
这样就产生了新的一代。
按照同样的方法,经过数代的遗传演变后,在最后一代中得到全局最优解或近似最优解。
同常规优化算法相比,遗传算法有以下特点:1)遗传算法是对参数的编码进行操作,而非对参数本身。
遗传算法首先基于一个有限的字母表,把最优化问题的自然参数集编码为有限长度的字符串。
基于归一化遗传算法的PID控制器自适应整定2019.19科学技术创新基于归一化遗传算法的PID 控制器自适应整定刘文瑞3赵磊1,2,3颜子荔3(1、天津市先进机电系统设计与智能控制重点实验室,天津3003842、机电工程国家级实验教学示范中心(天津理工大学),天津3003843、天津理工大学机械工程学院,天津300384)PID 控制器在自动化生产和交直流伺服系统控制中是最普遍采用的控制策略。
PID 控制器主要参数是比例系数、积分系数和微分系数,它们通过线性组合构成控制量,对被控对象进行控制,故称为PID 控制器[1]。
PID 是最早应用到工业生产的控制策略之一,由于其算法简单、鲁棒性好和可靠性高等明显优势,得到广泛应用。
该类控制器对于已知精确数学模型系统的控制效果最佳[2]。
然而,在实际控制系统中,尤其是复杂的伺服控制系统,由于系统具有一定的非线性、时变性和不确定性,难以获得精确的数学模型,故应用的传统常规的PID 控制难以满足控制要求,主要问题在于PID 控制器最优参数的整定结果不理想,易出现控制器动态响应性能欠佳和稳态误差大的问题,导致适应性很差。
目前,PID 控制器参数优化的方法有很多,如间接寻优法、梯度法、爬山法等,而在热工系统中单纯形法、专家整定法应用较广。
上述几种方法对于控制模型精确的线性系统取得很好的控制效果,但对于非线性、时变系统的控制较差[3]。
单纯形法对初值优劣性敏感度高,易陷入局部最优解,造成优化失败;专家整定法需要太多的经验作数据支撑,不同的目标函数对应不同的数据参数,而整理庞大的专家数据库是一项繁重而又耗时的工程。
因此,寻求一种自适应PID 控制器参数的整定方法实现在线自适应参数的优化工作,具有重要的理论研究意义和工程应用价值。
1归一化遗传算法归一化遗传算法(NormalizedGenetic Algorithm )是在传统的一般GA 的基础上,对编码方式和控制算子进行改进、优化衍生的一种遗传算法。
引言PID操纵器结构简单且鲁棒性强,在操纵领域一直被普遍应用。
运算机的进展为在线辩识提供了条件,从而也为在线整定PID参数提供了可能。
PID操纵是工业进程中应用最普遍的策略之一,因此PID 操纵器参数的优化成为人们关注的问题,它直接阻碍操纵成效的好坏,并和系统的平安、经济运行有着密不可分的关系。
目前PID参数的优化方式很多,如:间接寻优法,梯度法,登山法等,而在热工系统中单纯形法、专家整定法那么应用普遍。
尽管二者都具有良好的寻优特性,但却存在一些短处,单纯刑法对初值比较灵敏,容易陷入局部最优解,造成寻优失败。
专家整定法那么需要太多体会,不同的目标函数对应不同的体会,而整理知识库是一项长时刻的工程。
因此咱们选取遗传算法来进行参数寻优,该方式是一种不需要任何初始信息并能够寻求全局最优解的高效的优化组合方式。
第一章:遗传算法和PID操纵原理简介一遗传算法简介大体原理遗传算法是依照生物进化的模型提出的一种优化算法。
遗传算法是从代表问题可能潜在解集的一个群组(popuation)开始的,而一个种群那么由通过基因(gene)编码(coding)的必然数量的个体(individual)组成。
每一个个体事实上是染色体(chromosome)带有特点的实体。
染色体作为遗传物质的要紧载体,即多个基因组合,其内部表现(即基因型)是某种基因组合,它决定了个体的形状的外部表现。
因此,在一开始需要实现从表现型到基因型的映射即编码工作。
由于仿照基因编码的工作很复杂,咱们往往进行简化,如二进制编码。
初代种群产生以后,依照适者生存和优胜劣汰的原理,逐代(genetation)演化产生出愈来愈好的近似解。
在每一代,依照问题域中个体的适应度(fitness)大小挑选(selection)个体,并借助于自然遗传学的遗传算子(genetic operator)进行组合交叉.(crossover)和变异(mutation),产生出代表新的解集的种群。
第32卷第2期2005年北京化工大学学报JOURNAL OF BEI J IN G UN IV ERSIT Y OF CHEMICAL TECHNOLO GYVol.32,No.22005基于改进遗传算法的PID 参数整定策略宋洪法1 靳其兵1 赵 梅2(1.北京化工大学信息科学与技术学院,北京 100029;2.苏州科技学院电子系,江苏苏州 215011)摘 要:针对简单遗传算法(SG A )收敛速度慢、易于早熟等缺点,在前人研究成果的基础上,提出动态调整搜索空间策略,对遗传算法进行多步渐进搜索。
并采用改进的自适应交叉算子和自适应变异算子,结合兼顾性能指标和响应过程平衡的适配函数,以多种改进方式相结合的遗传算法对PID 参数进行迭代寻优整定。
仿真结果表明:当被控对象存在较大纯滞后、时间常数特性时,采用本方法优化PID 控制器参数可获得比较满意的调节效果。
关键词:遗传算法;自适应交叉;早熟;PID 参数整定中图分类号:TP273收稿日期:2004205206基金项目:中国石化总公司资助项目(X503014);中国石油天然气集团公司资助项目(03E7042)第一作者:男,1981年生,硕士生E 2mail :songhongfa @ 目前PID 参数整定方法主要有两种,一种是经验整定法,另一种是智能整定方法[1]。
前者算法简单,容易实现,但缺乏灵活性;后者具有很强的自适应能力,但算法比较复杂,无法满足现场的快速响应要求。
因此,既要有自适应能力又要求算法相对简单的PID 自整定技术成为控制界学者研究的努力方向。
简单遗传算法(SG A )已被证明不能收敛到全局最优解[2]。
文献[326]对自适应交叉和变异概率作了一定分析;文献[7]给出了遗传算法适配函数的一般构造原则以及遗传算法的自适应机制。
本文在综合考虑上述研究成果的同时,分析发现:遗传算法的初值给定范围与其搜索效率有很大的关系,即搜索初值越接近最优值,搜索范围越小,遗传算法的搜索效率就越高。
用遗传算法实现PID参数整定
万佑红;李新华
【期刊名称】《自动化技术与应用》
【年(卷),期】2004(023)007
【摘要】PID参数整定一直是控制领域中的重要研究问题.本文在MATLAB平台上将遗传算法应用于PID参数的自动整定,算法实例仿真取得了良好的效果,为PID 参数整定方法提供了一种新的尝试.
【总页数】2页(P7-8)
【作者】万佑红;李新华
【作者单位】南京邮电学院,电子工程系,江苏,南京,210003;安徽大学,电子工程系,安徽,合肥,230001
【正文语种】中文
【中图分类】TP273.2
【相关文献】
1.基于免疫遗传算法的高频感应加热电源PID参数整定 [J], 张鹏刚;罗宏
2.基于改进遗传算法的PID参数整定研究 [J], 王文庆;杨楠
3.基于元胞遗传算法的PID参数整定 [J], 刘微;陈思敏
4.基于改进遗传算法的环形倒立摆PID参数整定 [J], 陈文;徐晓龙;钟晓伟;窦文涛
5.基于层次分析遗传算法PID参数整定的四旋翼控制系统 [J], 唐顺
因版权原因,仅展示原文概要,查看原文内容请购买。

基于遗传算法的伺服系统PID控制参数整定姚禹;王博;高智【摘要】针对串并联机床伺服系统具有多变量、非线性和强耦合的特点,提出了基于遗传算法的串并联机床伺服系统PID控制.利用遗传算法快速寻优PID参数,实现对PID参数的整定.通过Matlab/simulink对串并联机床的双闭环调速系统进行仿真分析,结果表明,该方法具有调节时间短、无超调、鲁棒性强等优点,明显提高了串并联机床伺服系统的控制性能.【期刊名称】《长春工业大学学报(自然科学版)》【年(卷),期】2017(038)006【总页数】6页(P526-531)【关键词】伺服系统;遗传算法;PID参数整定;串并联机床【作者】姚禹;王博;高智【作者单位】长春工业大学应用技术学院,吉林长春130012;长春市轨道交通集团有限公司,吉林长春 130012;长春工业大学应用技术学院,吉林长春130012【正文语种】中文【中图分类】TP2730 引言串并联数控机床伺服系统具有多变量、非线性、强耦合的特点[1-4],为了满足不同的加工需求,串并联数控机床要求多个控制模块共同协作,故此对应用在其上的控制器要求较高。
PID控制器具有原理简单、易于应用、鲁棒性强的优点,在以往数控机床中应用的非常广泛[5-7]。
然而,由于串并联数控机床伺服系统控制器要调节电流环、速度环和位置环的多个变量,同时这些变量又存在着并不十分明显的耦合关系,使得串并联数控机床伺服系统极易受负载扰动的影响,若采用常规PID 控制,控制器的参数选择则异常困难[8-10],这使得串并联数控机床的伺服系统难以取得满意的控制效果。
针对这一问题,文中利用遗传算法整定串并联数控机床伺服系统的PID控制参数解决耦合对PID控制参数的影响。
通过种群的多样性和较强的寻优能力[11-12],快速寻优电流环和速度环PID控制参数,实现对串并联数控机床伺服系统PID控制参数的整定,提高伺服系统的控制精度和适应性。
通过仿真分析,验证了所提方法具有调节时间短、无超调、鲁棒性强等优点,可改善串并联数控机床伺服系统的控制性能,进而提高串并联数控机床的加工精度。
PID参数整定方法PID(比例-积分-微分)是一种常见的控制算法,广泛应用于工业自动化领域。
在使用PID控制算法时,为了使系统能够达到良好的控制效果,需要进行参数整定。
本文将介绍几种常用的PID参数整定方法。
1.经验法:经验法是一种常见的PID参数整定方法,它基于工程师的经验和直觉。
根据控制对象的特性和要求,调整比例增益Kp、积分时间Ti和微分时间Td的值。
这种方法操作简单,但需要工程师具备一定的经验。
2. Ziegler-Nichols方法:Ziegler-Nichols方法是一种经典的PID参数整定方法,它通过试探法的方式确定参数。
具体操作步骤如下:-将积分时间Ti和微分时间Td设为0,只调整比例增益Kp。
-增加Kp,直到系统开始出现振荡。
-记下此时的Kp值,设为Ku。
-根据振荡周期Tu,计算出比例增益Kp、积分时间Ti和微分时间Td的值,即Kp=0.6Ku,Ti=0.5Tu,Td=0.125Tu。
3.系统辨识法:系统辨识法是一种通过实验数据分析来确定PID参数的方法。
步骤如下:-设定一定的输入信号,并记录系统的输入输出数据。
-通过数据处理方法,建立系统的数学模型,如传递函数或状态空间模型。
-利用系统辨识算法估计模型参数。
-根据辨识得到的模型参数,运用数学方法求解PID参数。
4.遗传算法优化法:遗传算法优化法通过模拟生物进化机制来最优解,可以用于PID参数的优化。
具体步骤如下:-通过实验数据建立系统的数学模型。
-设定适应度函数,作为评价PID参数优劣的指标。
-随机生成一组初始PID参数。
-利用遗传算法进行迭代优化,不断生成新的PID参数组合,并通过适应度函数评估其优劣。
-根据迭代次数或适应度达到一定要求时,停止优化,并得到最优PID参数。
5.自整定控制器方法:自整定控制器方法是一种通过系统自身对控制对象进行辨识和参数整定的方法。
常见的自整定控制器方法有自适应控制器和模型参考自适应控制器。
它们通过在线辨识控制对象的参数变化,并实时调整PID参数来达到控制要求。
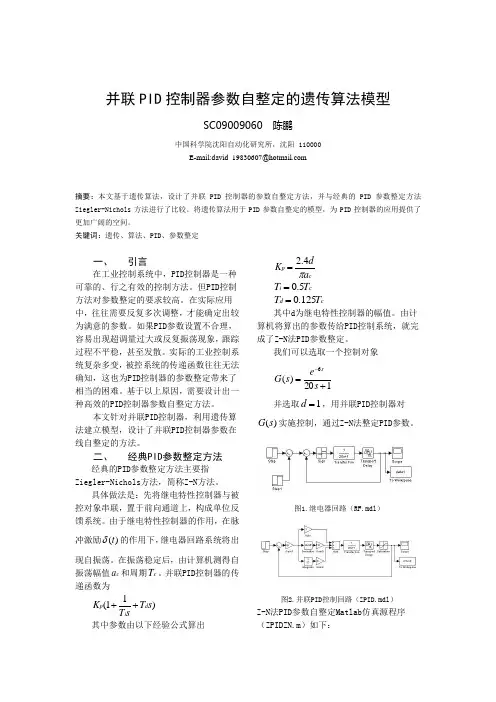
并联PID 控制器参数自整定的遗传算法模型SC09009060 陈鹏中国科学院沈阳自动化研究所,沈阳 110000E-mail:david_19830607@摘要:本文基于遗传算法,设计了并联PID 控制器的参数自整定方法,并与经典的PID 参数整定方法Ziegler-Nichols 方法进行了比较。
将遗传算法用于PID 参数自整定的模型,为PID 控制器的应用提供了更加广阔的空间。
关键词:遗传、算法、PID 、参数整定一、 引言在工业控制系统中,PID 控制器是一种可靠的、行之有效的控制方法。
但PID 控制方法对参数整定的要求较高。
在实际应用中,往往需要反复多次调整,才能确定出较为满意的参数。
如果PID 参数设置不合理,容易出现超调量过大或反复振荡现象,跟踪过程不平稳,甚至发散。
实际的工业控制系统复杂多变,被控系统的传递函数往往无法确知,这也为PID 控制器的参数整定带来了相当的困难。
基于以上原因,需要设计出一种高效的PID 控制器参数自整定方法。
本文针对并联PID 控制器,利用遗传算法建立模型,设计了并联PID 控制器参数在线自整定的方法。
二、 经典PID 参数整定方法经典的PID 参数整定方法主要指Ziegler-Nichols 方法,简称Z-N 方法。
具体做法是:先将继电特性控制器与被控对象串联,置于前向通道上,构成单位反馈系统。
由于继电特性控制器的作用,在脉冲激励)(t δ的作用下,继电器回路系统将出现自振荡。
在振荡稳定后,由计算机测得自振荡幅值c a 和周期c T 。
并联PID 控制器的传递函数为)11(s T sT K d i p ++其中参数由以下经验公式算出cp a dK π4.2=c i T T 5.0= cd T T 125.0=其中d 为继电特性控制器的幅值。
由计算机将算出的参数传给PID 控制系统,就完成了Z-N 法PID 参数整定。
我们可以选取一个控制对象120)(6+=-s es G s并选取1=d ,用并联PID 控制器对)(s G 实施控制,通过Z-N 法整定PID 参数。
CHANGZHOU INSTITUTE OF TECHNOLOGY毕 业 设 计 说 明 书题目:基于遗传算法的PID 整定与研究二级学院(直属学部): 延陵学院专业: 自动化 班级: 07自Y学生姓名: 王思凡 学号: 07121222指导教师姓名:张燕红 职称:评阅教师姓名: 职称:2011年 6月KC021-1摘要PID控制是工业过程中应用最为广泛的一种方法,而遗传算法是模拟自然界遗传机制和生物进化论而成的一种并行随机搜索的最优化的方法,它将“优胜劣汰、适者生存”的生物进化原理引入优化参数形成的编码串连的群体中,按照所选择的适配值函数并通过遗传中的复制、交叉及变异对个体进行筛选,使得适配值高的个体被保留下来,组成新的群体,新的群体又继承了上一代的信息,又优于上一代,这样群体中的个体的适应度不断提高,从而得到全局最优解。
通过适应度函数来确定寻优方向,与其他一些常规整定方法相比,遗传算法比较简便,整定精度较高。
本文用遗传算法对PID进行整定与研究,对该系统进行了仿真,实验结果表明该种算法的有效性和优越性,也表明遗传算法是一种简单高效的算法,与传统的PID控制方法相比明显地改善了控制系统的各方面性能。
关键词PID控制;遗传算法;PID参数整定;Matlab;AbstractPID control is the most widely used industrial process in a way, the genetic algorithm is to simulate the genetic mechanisms and biological evolution in nature made of a parallel random search optimization method. It "survival of the fittest" theory of biological evolution optimized the parameters of the introduction of the encoding group in series.According to the adaptive value function which and through the heredity in duplication chooses, overlapping and the variation to the individual carries on screening, causes the adaptive value high individual to retain, forms the new community, the new community has inherited previous generation's information, also surpasses the previous generation, in such community's individual's sufficiency enhances unceasingly, thus obtains the globally optimal solution.Through the sufficiency function definite optimization direction, compares with other conventional installation method, the genetic algorithm is quite simple, the installation precision is high.In this paper, genetic algorithm for tuning PID and study the simulation of the system, experimental results show that the effectiveness and superiority of the kinds of algorithms, but also show that the genetic algorithm is a simple and efficient algorithm, and compared the traditional PID control method significantly improved control over all aspects of system performance.Key words : PID control; genetic algorithm; PID parameter tuning; Matlab目录摘要 (I)Abstract ........................................................................................................................... I I 目录 (III)第1章绪论 ................................................................................................................ - 1 -1.1课题研究背景 ................................................................................................ - 1 -1.2国内外研究现状 ............................................................................................ - 2 -1.3论文主要研究内容、目的和意义 ................................................................ - 5 -第2章PID算法简介 ................................................................................................. - 6 -2.1 PID控制原理................................................................................................. - 6 -2.2 PID控制器的基本用途................................................................................. - 7 -2.3 PID控制器的现实意义................................................................................. - 8 -2.4 PID控制器的参数整定................................................................................. - 8 -2.5本章小结 ...................................................................................................... - 10 -第3章遗传算法的基本理论及研究 ...................................................................... - 11 -3.1遗传算法的概念 .......................................................................................... - 11 -3.2标准遗传算法 .............................................................................................. - 11 -3.3遗传算法的模式定理 .................................................................................. - 12 -3.4标准遗传算法的结构、特点和应用关键 .................................................. - 13 -3.5本章小结 ...................................................................................................... - 16 -第4章基于遗传算法的PID参数整定 ................................................................. - 17 -4.1 Matlab简介.................................................................................................. - 17 -4.2 基于遗传算法PID控制器参数整定设计................................................. - 18 -4.3本章小结 ...................................................................................................... - 19 -第5章基于遗传算法的PID仿真 ......................................................................... - 20 -5.1遗传算法关键步骤的Matlab实现............................................................. - 20 -5.2基于二进制的遗传算法的PID仿真.......................................................... - 22 -5.3基于实数制的遗传算法PID仿真.............................................................. - 27 -5.4本章小结 ...................................................................................................... - 31 -结论 ............................................................................................................................ - 32 -参考文献 .................................................................................................................... - 33 -致谢 ............................................................................................................................ - 36 -附录 ............................................................................................................................ - 37 -第1章绪论1.1课题研究背景PID调节器是最早发展起来的控制策略之一,因为它所涉及的设计算法和控制结构都是简单的,并且十分适用于工程应用背景,此外PID控制方案并不要求精确的受控对象的数学模型,且采用PID控制的控制效果一般是比较令人满意的,所以在工业实际应用中,PID调节器是应用最为广泛的一种控制策略,也是历史最久、生命力最强的基本控制方式。
基于遗传算法的PID整定原理及matlab仿真程序主程序:chap5_2.m%ga(通用算法)程序优化EPID参数;closeall;globalrinyouttimef尺寸=30;codel=3;minx(1)=zeros(1);maxx(1)=20*ones(1);minx(2)=zeros(1);maxx(2)=1.0*ones(1);minx( 3)=zeros(1);maxx(3)=1.0*ones(1);kpid(:,1)=minx(1)+(maxx(1)-minx(1))*rand(大小,1);kpid(:,2)=minx(2)+(maxx(2)-minx(2))*rand(大小,1);kpid(:,3)=minx(3)+(maxx(3)-minx(3))*rand(大小,1);g=100;bsj=0;%***************开始转动***************分叉g=1:1:gtime(kg)=kg;%******步骤1:evaluatebestj****fori=1:1:sizekpidi=kpid(i,:);[kpidi,bsj]=chap5_2f(kpidi,bsj);bsji(i)=bsj;终止[oderji,indexji]=sort(bsji);bestj(kg)=oderji(1);bj=bestj(kg);ji=bsji+1e-10;%避免变零fi=1./ji;%cm=最大值(ji);%fi=cm-ji;[oderfi,indexfi]=排序(fi);%排列Fismalltobiggerbestfi=oderfi(大小);%letbestfi=最大值(fi)bests=kpid(indexfi(size),:);%letbests=e(m),mistheindexfibelongtomax(fi)kgbjbests%******step2:selectandreproductoperation******fi_sum=sum(fi);fi_u大小=(奥德菲/fi_u总和)*大小;fi_s=floor(fi_size);%selectingbiggerfivaluer=size-sum(fi_s);rest=fi_u-size-fi_u-s;[restvalue,index]=sort(rest);fori=尺寸:-1:尺寸-r+1fi_s(index(i))=fi_s(index(i))+1;%addingresttoequalsizeendk=1;fori=size:-1:1%selectthesizethandreproducefirstlyforj=1:1:fi_s(i)tempe(k,:)=kpid(indexfi(i),:);%选择和生产k=k+1;%kisusedtoreproduceendend%************步骤3:交叉操作************pc=0.90;fori=1:2:(1号)温度=rand;ifpc>temp%crossoverconditionalfa=rand;tempe(i,:)=alfa*kpid(i+1,:)+(1-alfa)*kpid(i,:);tempe(i+1,:)=alfa*kpid(i,:)+(1-alfa)*kpid(i+1,:);恩登tempe(size,:)=bests;kpid=tempe;%************步骤4:突变操作***************pm=0.10-[1:1:大小]**(0.01)/size;%biggerfi,smallerpmpm_uurand=rand(大小,代码);平均值=(最大值+最小值)/2;dif=(maxx-minx);fori=1:1:sizeforj=1:1:codelifpm(i)>pm_rand(i,j)%mutationconditiontempe(i,j)=mean(j)+dif(j)*(rand-0.5);endendend%最佳个人温度(尺寸:)=最佳;kpid=tempe;endbestfibestsbest_j=bestj(g)figure(1);情节(时间,bestj);xlabel(’times’);ylabel(’bestj’);figure(2);绘图(timef,rin,'r',timef,yout,'b');xlabel(“时间”);伊拉贝尔(“林,你”);子程序:chap5_2f.m函数[kpidi,bsj]=pid_gaf(kpidi,bsj)globalrinyoutTimets=0.001;sys=tf(400[1,50,0]);dsys=c2d(sys,ts,'z');[num,den]=tfdata(dsys,’v’);rin=1.0;u_1=0.0;u_2=0.0;y_1=0.0;y_2=0.0;x=[0,0,0]';b=0;error_1=0;tu=1;s=0;p=100;fork=1:1:ptimef(k)=k*ts;r(k)=rin;u(k)=kpidi(1)*x(1)+kpidi(2)*x(2)+kpidi(3)*x(3);ifu(k)>=10u(k)=10;end如果u(k)<=-10u(k)=-10;终止yout(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2;error(k)=r(k)-yout(k);%------------PID参数的返回----------------u_2=u_1;u_1=u(k);y_2=y_1;y_1=yout(k);x(1)=error(k);%calculatingpx(2)=(error(k)-error_1)/ts;%calculatingdx(3)=x(3)+error(k)*ts;%calculatingi错误2=错误1;误差1=误差(k);如果s==0ifyout(k)>0.95&yout(k)<1.05tu=timef(k);s=1;endendendfori=1:1:pji(i)=0.999*abs(error(i))+0.01*u(i)^2*0.1;b=b+ji(i);ifi>1 erry(i)=yout(i)-yout(i-1);费里(i)<0b=b+100*abs(erry(i));endendendbsj=b+0.2*tu*10;。
基于免疫遗传新算法的PID参数整定
司徒莹
【期刊名称】《计算机工程与设计》
【年(卷),期】2009(030)010
【摘要】为使PID参数整定工作更加快捷有效,在传统遗传算法的基础上,提出基于独特型免疫动力学网络模型的新型免疫算法,以激励水平作为抗体选择操作的量度,并构建精英抗体库,以便给精英抗体更多交叉变异的机会.将该算法用于PID控制器参数整定,仿真结果表明,新算法能更快地找到控制器PID参数最优组合,且经该算法优化后的系统控制性能优于传统遗传算法优化的PID控制器,故该算法用于PID参数优化是可行且有效的.
【总页数】3页(P2461-2463)
【作者】司徒莹
【作者单位】茂名学院自动化系,广东,茂名,525000
【正文语种】中文
【中图分类】TP18
【相关文献】
1.基于免疫遗传算法的高频感应加热电源PID参数整定 [J], 张鹏刚;罗宏
2.基于矢量矩免疫遗传算法的PID参数整定 [J], 盛孟刚;黄辉先
3.基于元胞遗传算法的PID参数整定 [J], 刘微;陈思敏
4.基于改进遗传算法的环形倒立摆PID参数整定 [J], 陈文;徐晓龙;钟晓伟;窦文涛
5.基于层次分析遗传算法PID参数整定的四旋翼控制系统 [J], 唐顺
因版权原因,仅展示原文概要,查看原文内容请购买。
基于遗传算法的PID参数优化目录1 绪论 (1)1.1 选题意义与研究价值 (1)1.1.1 PID控制器 (1)1.1.2 PID 控制器参数优化分类 (3)1.1.3 遗传算法的简介 (6)1.2国内外研究现状 (7)1.3 本文的主要研究内容 (7)2 遗传算法 (8)2.1 遗传算法概要 (8)2.2 基本遗传算法的实现技术 (9)2.2.1算法流程 (9)2.2.2 编码方法 (10)2.2.3 适应度函数 (10)2.2.4 选择、交叉、变异算子 (11)2.3 遗传算法与其他算法比较 (11)2.4 遗传算法优点 (13)3 基于遗传算法的PID控制器参数优化 (14)3.1 传统遗传算法的PID整定 (14)3.2 算法步骤 (15)3.3 系统仿真—MATLAB语言 (16)3.3.1 遗传算法的参数设置 (16)3.3.2 MATLAB 遗传算法操作 (16)4 基于遗传算法的PID参数优化的应用 (18)4.1 柴油机调速系统模型概述 (18)4.1.1 测速环节 (18)4.1.2 柴油机 (19)4.1.3柴油机控制系统模型 (19)4.1.4 数学模型的建立 (19)4.2 柴油机调速系统的PID参数优化设计与仿真 (20)4.3 基于遗传算法优化柴油机调速系统PID参数 (22)结论 (25)1 绪论1.1 选题意义与研究价值20世纪30年代以来,自动化生产飞速发展,取得了惊人的成就,过程控制是工业自动化中的一个重要分支。
生产对过程控制的要求为安全性、稳定性以及经济性,在很多情况下,PID控制器就可以实现其控制任务,而且,它也以自身结构简单、容易实现、鲁棒性强等优点,在各个工业生产控制中占据着主导地位。
PID控制器的设计和应用,其核心问题就是参数的整定与优化,合适的控制器参数会使得生产更为高效与安全,在方案设计合理的基础上,参数的整定将会影响到控制器的质量[1]。
随着现代控制理论的建立与完善,过程控制的方法和思路也在不断创新,与此同时,为了适应日益提高的生产工艺,过程控制的要求也越来越高。
PID控制器参数的自整定PID控制器是一种常用的控制算法,它通过调节控制器的参数来使系统输出达到期望值。
而PID控制器参数的自整定是指根据系统的特性自动地确定PID参数值的过程。
在工业控制领域,PID参数的自整定是一项重要的任务,它能够提高系统的控制性能和适应性。
传统的手动整定PID参数的方法通常是通过试错法,即根据经验不断调整参数值,直到系统达到期望的控制效果。
然而,这种方法往往需要大量的时间和经验,并且容易出现误差较大的情况。
因此,研究人员提出了多种自整定PID参数的方法,下面将介绍几种常用的自整定方法。
1.暴力方法:这种方法通过在一定范围内PID参数的组合,计算每一组参数对应的系统响应,并选择效果最佳的参数组合作为最终的参数值。
虽然这种方法能够得到相对较好的控制效果,但计算量大,速度较慢。
2.递推式自整定方法:这种方法通过分析系统的动态特性,将参数的更新规则表示为递推式,并根据实时的系统响应信息来不断更新参数值。
这种方法能够迅速收敛到较优的参数值,并且能够适应系统参数变化。
3.遗传算法方法:这种方法通过模拟生物进化的过程,在参数空间中最优的PID参数组合。
遗传算法通过选择、交叉和变异等操作来寻找适应度最高的参数组合。
虽然这种方法计算量大,但能够得到较好的参数值。
以上只是几种常见的自整定方法,在实际应用中,还有很多其他的自整定方法。
自整定PID参数是一个复杂的问题,需要根据具体的系统特性和控制要求选择适合的方法。
一般情况下,自整定PID参数的目标是使系统具有良好的稳定性、快速的响应时间和良好的鲁棒性。
在实际应用中,可以根据系统的实际情况选择合适的自整定方法,并通过实验和经验来不断调整参数值,以达到最佳的控制效果。
控制理论与应用《自动化技术与应用>2004年第23卷第7期
鱼塑型卫塑型璺型垒巳巳!型!塑!
用遗传算法实现PID参数整定万佑红1,李新华2(1.南京邮电学院电子工程系,江苏南京210003;2.安徽大学电子工程系,安徽合肥230001)
摘要:PID参数整定一直是控制领域中的重要研究问题。本文在MAⅡAB平台上将遗传算法应用于PID参数的自动整定,算法实例仿真取得了良好的效果,为PID参数整定方法提供了一种新的尝试。关键词:PⅢ参数;遗传算法中图分类号:皿273.2文献标识码:A文章编号:1003—724l(2004)Cr7—00Cr7—02
PlDTuningBasedOnGeneticAlgOrithms
WANY叫一h肌91,UⅪn—hI耐
(1.Elec吣icsDepanⅡ屺mof№mjingUIliversi哆of
Pbsting‰llIloLog)r,NanjiIlg210003,Clli眦;
2.Ekc咖icsDepam煳tofAnHlliUIliversi竹,Hefei
230001,Cllim)
Al舭t:A
newmetllodtosolvet}let血IlgofPIDpar删ersisproposedintllispaper.hisshowed山atgoodcontIDle船ctbeobtainedbyusing
GeneticAl鲥山nls(GA).I
Keywords:Pmparamr【ers;GA
l引言啪控制无需知道被控对象的数学模型,算法简单,鲁棒性好且可靠性高,因此成为一种获得广泛应用的控制策略。但在实际生产现场中,由于PⅢ参数整定困难,常规Pm控制器参数往往整定不良,性能欠佳,长期以来,人们一直在寻求PⅢ控制器参数的自动整定技术,例如:快速整定法、继电器法、IsIE最优设定方法、梯度法…等,但上述方法在是否寻到最适合的参数值和对控制对象的要求上都不同程度地存在局限性。遗传算法(GA)是模拟自然界生物进化过程的一种全局优化算法,只需由目标函数值转换得来的适应值信息,因而对控制对象本身没有特殊要求,尤其适合处理复杂的、非线性的问题。本文研究了如何将遗传算法应用于PⅢ控制器参数的自动整定以及在MAJII。AB平台上算法的描述和实现,并选用典型控制对象进行仿真验证。
2PID控制及参数整定皿控制器系统原理框图如下图1所示:将偏差的比例(酶)、积分(KI)和微分(KD)通过线性组合构成控制量,对被控对象进行控制,珞、KI和KD三个参数的选取直接影响了控制效果。
收稿日期:2004一01一14
图lPⅢ控制器系统原理框图r一系统输入变量,c一系统输出变量,偏差e=r—f
3算法的描述及实现3.1参数编码遗传算法是对问题参数所转化成的染色体实施模拟进化操作,所以要解决的首要问题就是要通过编码将解空间的解数据表示成遗传空间的基因型串结构数据。本文采用适用于多种问题的多变量二进制编码方式瞳],对三个待优化的参数l(P、KI和K进行编码。每个参数的编码长度由该参数的取值范围和搜索精度确定。考虑到控制系统的多样性,由用户输入各个参数的取值范围;而控制系统对酶、KI和KD参数都具有鲁棒性,考虑一般工业控制系统的精度要求,本文将搜索精度定为常数0.00l。将这三个参数依次级联起来形成个体,再根据用户输入的初始种群大小,即可产生初始群体。3.2适应度函数
万方数据《自动化技术与应用>2004年第23卷第7期控制理论与应用遗传算法在搜索进化过程中仅用适应度值来评价个体或解的优劣,并作为以后遗传操作的依据,使得初始解逐步向最优解发展。根据Is,IE准则b],为了获得较好的系统阶跃响应,应使时间乘以误差平方的积分最小,目标函数可以表示为
g=I(钯(t))2出式中e(t)为误差信号。采用如下目标函数g到适值函数finless的映射方式:№:I。gg“L0g≥C式中c为目前所有代中见到的g的最大值。这样既保证了目标函数的优化方向对应适值增大的方向,又保证了映射后的适值是非负的。3.3选择策略种群中同时存在N个个体,根据它们对问题环境的适应能力选择哪个被淘汰,那个被保留以繁殖后代。本文将传统的轮盘选择法与最优保留策略结合起来使用H]。首先在当前群体{Sk}中找出适应值最高的最优个体譬,将其保留到一个不参与交叉、变异操作的变量咂M中,然后对剩余个体按照与个体适应值大小成正比的概率进行选择,执行交叉、变异操作,产生下一代种群{Sk+。},如果{Sk+。}中最优个体Sl【+。+优于Sk+,则用Sk+。+替换,IEM,否则保持不变。这样,不仅能不断提高种群的平均适应值,而且能保证最佳个体的适应值不减小。在一定程度上提高了收敛速度,更易得到最优解。3.4控制参数在遗传操作中,交叉算子将被选中的2个个体按概率Pc在随机选取的位置上进行两两交叉,生成2个新的个体,Pc可以理解为交叉操作的频率,Pc太大,会使适应值高的个体很快被破坏掉,Pc太小,搜索会停滞不前。;变异算子按一定概率PIn将新个体的某些位进行变异,变异位由随机数发生器产生,PrIl太大,会导致搜索空间过份增大而变得较盲目,PIIl太小,又会阻碍新的基因形成。综合考虑上述因素,结合实际仿真效果,本文取Pc=0.65,PlIl=0.1,初始种群大小p0_psize=30。4仿真实例遗传算法的各种操作都是针对染色体进行的,而染色体实质上是一个向量,可将其看作一个1*n的矩阵,在各种编程语言中,MA,IIAB语言的基本数据单元就是一个维数不加限制的矩阵,而且包含了强大的控制系统工具箱以及仿真环境s删.I皿Ⅸ。因此,本文采用MA-11AB作为软件平台进行系统编程和仿真。在工业控制系统中,典型传递函数的形式是有延迟的一阶和二阶惯性环节,下面分别以这两种被控对象的传递函数为例进行仿真实验,并将遗传算法优化结果与传统的咖整定结果作比较。仿真实验一:被控对象模型为r㈧一1.5e一55Lr\3,一10s+l按IsIE最优设定法【51可得Kp=1.294,Ⅺ=0.112,Kd=2.659;经系统仿真实验,得到阶跃响应曲线如图2中曲线1所示。用遗传算法来优化Pm控制器参数可得Kp=1.313,l(i=0.094,Kd=2.876,其阶跃响应曲线如图2中曲线2所示。
图2实验l的sIE设定法和遗传算法控制效果比较仿真实验二:被控对象模型为
G(s)2击研按SrE最优设定法可得Kp=1.648,瞄=0.843,Kd=0.659;经系统仿真实验,得到阶跃响应曲线如图3中曲线3所示。用遗传算法来优化PⅢ控制器参数回得Kp=2.647,I(i=o.824,Kd=1.542,其阶跃响应曲线如图3中曲线4所示。
图3实验2的研E设定法和遗传算法控制效果比较5结束语从以上仿真实验的控制效果图可以明显看出,基于遗传算法的PⅢ控制器要比传统PⅢ控制器在响应速度、超调等方面都要理想一些,表明采用遗传算法对控制器参数进行优化选择是可行的,可获得比传统设计方法更优良的控制效果。
6参考文献:[1]BENNEI’s.Devdop啪ntof
tlle肿00n删哪[J].IEEEc呲Dl
Sys蛐Ma鲥ne,1993,13(2):58—65
[2]张晓绩,方浩,戴冠.遗传算法的编码机制研究[J].信息与控制,199r7,26(2):134一139[3]薛定宇著.控制系统计算机辅助设计[M].北京:清华大学出
版社,1996,253—270[4]赵洁,等.基于神经网络一遗传算法的双轴运动啪控制[J].
自动化技术与应用,2003,22(7):8—10[5]陶永华,尹怡欣,葛芦生编著.新型PⅢ控制及其应用[M].北京:机械工业出版社,1998
作者简介:万佑红(1974一),女,讲师,南京邮电学院电子工程系工作,在读博士,主要研究方向:电子电路设计,自动控制与网络安全等。
万方数据用遗传算法实现PID参数整定作者:万佑红, 李新华作者单位:万佑红(南京邮电学院,电子工程系,江苏,南京,210003), 李新华(安徽大学,电子工程系,安徽,合肥,230001)刊名:自动化技术与应用
英文刊名:TECHNIQUES OF AUTOMATION AND APPLICATIONS年,卷(期):2004,23(7)被引用次数:17次
1.Bennet S Development of the PID controllers 1993(02)2.张晓缋;方浩;戴冠 遗传算法的编码机制研究 1997(02)3.薛定宇 控制系统计算机辅助设计 19964.赵洁 基于神经网络-遗传算法的双轴运动PID控制[期刊论文]-自动化技术与应用 2003(07)5.陶永华;尹怡欣;葛芦生 新型PID控制及其应用 1998
1. 席育凡.曾光.张静刚.XI Yu-fan.ZENG Guang.ZHANG Jing-gang 基于改进遗传算法的数字PID参数整定[期刊论文]-西安理工大学学报2006,22(4)2. 陈永红.朱从乔.王基 基于自适应在线遗传算法的PID参数整定与优化[会议论文]-3. 李俊丽.张光辉.LI Jun-li.ZHANG Guang-hui 鲁棒PID控制器参数整定与仿真[期刊论文]-自动化与仪表2005,20(3)4. 谢勤岚.陈红 基于遗传算法的PID控制器优化设计[期刊论文]-光学与光电技术2003,1(3)5. 宋洪法.靳其兵.赵梅.SONG Hong-fa.JIN Qi-bing.ZHAO Mei 基于改进遗传算法的PID参数整定策略[期刊论文]-北京化工大学学报(自然科学版)2005,32(2)6. 陈敏.谭思云.黄玉清.CHEN Min.TAN Si-yun.HUANG Yu-qing 遗传算法在PID参数整定中的应用[期刊论文]-仪表技术2010(5)
1.张付祥.付宜利.王树国 基于遗传算法的多PID控制器参数整定[期刊论文]-制造业自动化 2005(5)2.唐锐.文忠波.文广 一种基于遗传PID控制的力反馈双向伺服系统研究[期刊论文]-机床与液压 2009(4)3.刘国联.谭冠政.何燕 基于改进人工免疫算法的PID参数优化研究[期刊论文]-计算机工程与应用 2008(19)4.赵语涛.张健成 二次速度调节中的遗传PID控制方法[期刊论文]-液压与气动 2005(10)5.邓长春.朱儒明.李咏霞.许波 一种求解TSP问题的多种群并行遗传算法[期刊论文]-计算机仿真 2008(9)6.唐锐.文忠波.文广 一种基于BP神经网络的模糊PID控制算法研究[期刊论文]-机电产品开发与创新 2008(2)7.张建平.刘庆滨 生物制氢过程实现温度控制的解决方案[期刊论文]-自动化技术与应用 2005(5)8.董红生 基于多点频率特性辨识的自整定 PID控制器的研究[期刊论文]-自动化技术与应用 2005(5)9.张索峰.李平 基于改进粒子群算法的PID参数整定[期刊论文]-工业仪表与自动化装置 2010(2)10.张俐 基于小生境遗传算法的MTSP问题求解[期刊论文]-系统工程 2009(7)11.吴春富 基于遗传算法优化的模糊PID控制研究[期刊论文]-自动化技术与应用 2005(7)12.乔志杰.程翠翠 基于遗传算法优化的模糊PID控制研究及其仿真[期刊论文]-皖西学院学报 2009(5)13.乔志杰.程翠翠 基于遗传算法优化的模糊PID控制研究及其仿真[期刊论文]-安徽电气工程职业技术学院学报