基于改进遗传算法的PID参数整定
- 格式:pdf
- 大小:205.14 KB
- 文档页数:4
福建电脑2014年第2期课题来源:徐州工程学院“江苏省大学生创新创业训练计划项目(创新类)”,编号XCX13095,名称基于遗传算法的PID 参数整定。
0.引言PID 控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高,被广泛应用于过程控制和运动控制中,尤其适用于可建立精确数学模型的确定性控制系统中。
在PID 控制中,控制效果的好坏完全取决与PID 参数的整定与优化。
目前,PID 参数整定与优化方法有很多,如Z-N 法、继电型自整定法、最优设计法及梯度法、单纯形法。
前几种整定方法带有经验性并且不是最优解,梯度法和单纯形法极易陷入局部最优点。
因此可采用遗传算法进行参数寻优,该方法是一种不需要任何初始信息并可以寻求全局最优解的高效优化组合方法。
1.遗传算法遗传算法,是由美国的J.H.Holland 提出的一种模仿生物进化过程的最优化方法。
是以自然选择与遗传理论为基础,将生物进化过程中适者生存与群体内部染色体的随机信息交换机制相结合的全局搜索算法。
近年来,人们把它应用于学习、优化、自适应等问题中。
在优化问题中,遗传算法过程简述如下。
首先在解空间中取一群点(基因群),作为遗传开始的第一代。
每个点(基因)用一个二进制的数字串表示,其优劣程度用一个适应度函数来衡量。
适应度函数值小,表明那个点(基因)好,容易在遗传中生存下去。
在向下一代遗传演变中,前一代中的每个数字串根据由其适应度函数值决定的概率被复制到配对池中。
好的数字串以高的概率被复制下来,劣的数字串被淘汰掉。
然后将配对池中的数字串任意配对,并对每一对数字串进行交叉操作,产生新的子孙(数字串)。
最后对新的数字串的某一位进行变异。
这样就产生了新的一代。
按照同样的方法,经过数代的遗传演变后,在最后一代中得到全局最优解或近似最优解。
同常规优化算法相比,遗传算法有以下特点:1)遗传算法是对参数的编码进行操作,而非对参数本身。
遗传算法首先基于一个有限的字母表,把最优化问题的自然参数集编码为有限长度的字符串。
控制理论与应用Control Theory and Applications《自动化技术与应用》2004年第23卷第7期用遗传算法实现PID 参数整定万佑红1,李新华2(1.南京邮电学院电子工程系,江苏 南京 210003; 2.安徽大学电子工程系,安徽 合肥 230001)摘要:PI D 参数整定一直是控制领域中的重要研究问题。
本文在M AT LAB 平台上将遗传算法应用于PI D 参数的自动整定,算法实例仿真取得了良好的效果,为PI D 参数整定方法提供了一种新的尝试。
关键词:PI D 参数;遗传算法中图分类号:TP27312 文献标识码:A 文章编号:100327241(2004)0720007202PID Tu nin g Bas e d O n Ge netic Alg orit h m sWAN You -hong 1,LI Xin -hua 2(1.E lectronics Department of Nanjing University of P osting T echnology ,Nanjing 210003,China ;2.E lectronics Department of AnHui University ,Hefei 230001,China )Abstract :A new method to s olve the tuning of PI D paramrters is proposed in this paper.I t is showed that g ood control effect can be obtained by usingG enetic Alg orithms (G A ).K ey w ords :PI D paramrters ;G A1 引言PI D 控制无需知道被控对象的数学模型,算法简单,鲁棒性好且可靠性高,因此成为一种获得广泛应用的控制策略。
PID控制是工业过程控制中应用最广的策略之一,因此PID控制器参数的优化成为人们关注的问题,它直接影响控制效果的好坏,并和系统的安全、经济运行有着密不可分的关系。
目前PID参数的优化方法有很多,如间接寻优法、梯度法、爬山法等,而在热工系统中单纯形法专家整定法则应用较广。
虽然这些方法都具有良好的寻优特性,但存在着一些弊端,单纯形法对初值比较敏感,容易陷入局部最优化解,造成寻优失败。
专家整定法则需要太多的经验,不同的目标函数对应不同的经验,而整理知识库则是一项长时间的工程。
因此我们选取了遗传算法来进行参数寻优,该方法是一种不需要任何初始信息并可以寻求全局最优解的、高效的优化组合方法。
采用遗传算法进行PID三个系数的整定,具有以下优点:(1)与单纯形法相比,遗传算法同样具有良好的寻优特性,且克服了单纯形法参数初值的敏感性。
在初始条件选择不当的情况下,遗传算法在不需要给出调节器初始参数的情况下,仍能寻找到合适的参数,使控制目标满足要求。
同时单纯形法难以解决多值函数问题以及在多参数寻优(串级系统)中,容易造成寻优失败或时间过长,而遗传算法的特性决定了它能很好地客服以上问题。
(2)与专家整定相比,它具有操作方便、速度快的优点,不需要复杂的规则,只通过字串进行简单地复制、交叉、变异,便可达到寻优。
避免了专家整定法中前期大量的知识库整理工作及大量的仿真实验。
(3)遗传算法是从许多点开始并行操作,在解空间进行高效启发式搜索,克服了从单点出发的弊端及搜索的盲目性,从而使寻优速度更快,避免了过早陷入局部最优解。
(4)遗传算法不仅适用于单目标寻优,而且也适用于多目标寻优,根据不同的控制系统,针对一个或多个目标,遗传算法均能在规定的范围内寻找到合适参数。
遗传算法作为一种全局优化算法,得到越来越广泛的应用。
近年来,遗传算法在控制上的应用日益增多。
二、基于遗传算法的PID整定原理1、参数的确定及表示首先确定参数范围,该范围一般是由用户给定,然后由精度的要求,对其进行编码。
反馈是一个非常有用的概念。
反馈控制的使用常常带来革命性的结品控制器采用的是引入微分增益的实际PID 控制算法,其传递函数形式果,极大地改善了控制性能。
PID 控制是到目前为止实际使用中最主要的反馈控制形式。
PID 控制是比例积分微分控制的简称。
积分、比例和微分反馈分别基于过去(I )、现在(P )和将来(D )的控制偏差。
在生产过程自动控制的发展历程中,PID 控制是历史最久、生命力最强的基本控制方式。
PID 控制器的传统整定方法,如Ziegler-Nichols (Z-N )法、响应曲线法、临界比例法、继电型自整定法、单纯形法等,或是依赖于对象模型,或是易于陷入局部极小,均存在一定的应用局限性,且难以实现高性能的整定效果,常常超调较大、调整时间较长、误差指标过大等。
近年来,遗传算法作为一种新兴的优化和自学习算法在控制工程中逐渐受到重简单来说,PID 控制器各校正环节的作用是:视,它是一种基于生物进化论的并行搜索算法,搜索空间大,通过设计合1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,适的算法参数和策略能够避免陷入局部最小。
由于其独到的解决问题的能控制器立即产生控制作用,以减小偏差;力,其应用已渗透到控制领域诸多方面(系统辨识和模型降阶、最优控2)积分环节:主要用于消除静差。
积分作用的强弱取决于积分时间制、线性和非线性控制、滑模控制、鲁棒控制、模糊逻辑控制、神经网络控制和自适应控制等)。
3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系1 PID控制器原理统的动作速度,减少调节时间。
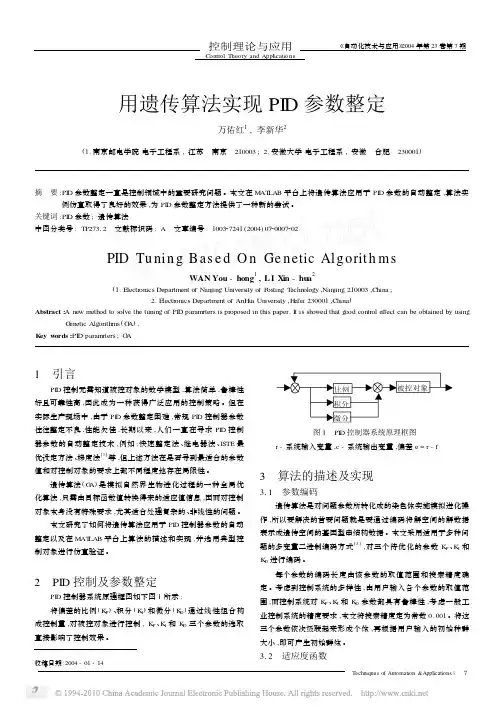
PID 控制是一种负反馈控制。
其反馈控制原理图如图1所示。
2 基于遗传算法的PID参数整定遗传算法是模拟生物在自然环境中的遗传和进化过程而形成的一种自适应全局优化概率搜索算法。
随着火电机组单机容量和参数的不断提高,系统变得日趋复杂,热工过程越来越表现出非线性、慢时变、大迟滞、强耦合性和不确定性,这对热工过程自动控制系统则提出了更高的要求,传统的PID 控制已经无法满足这种要求,必须采用先进的控制策略进行优化控制。
2019.19科学技术创新基于归一化遗传算法的PID 控制器自适应整定刘文瑞3赵磊1,2,3颜子荔3(1、天津市先进机电系统设计与智能控制重点实验室,天津3003842、机电工程国家级实验教学示范中心(天津理工大学),天津3003843、天津理工大学机械工程学院,天津300384)PID 控制器在自动化生产和交直流伺服系统控制中是最普遍采用的控制策略。
PID 控制器主要参数是比例系数、积分系数和微分系数,它们通过线性组合构成控制量,对被控对象进行控制,故称为PID 控制器[1]。
PID 是最早应用到工业生产的控制策略之一,由于其算法简单、鲁棒性好和可靠性高等明显优势,得到广泛应用。
该类控制器对于已知精确数学模型系统的控制效果最佳[2]。
然而,在实际控制系统中,尤其是复杂的伺服控制系统,由于系统具有一定的非线性、时变性和不确定性,难以获得精确的数学模型,故应用的传统常规的PID 控制难以满足控制要求,主要问题在于PID 控制器最优参数的整定结果不理想,易出现控制器动态响应性能欠佳和稳态误差大的问题,导致适应性很差。
目前,PID 控制器参数优化的方法有很多,如间接寻优法、梯度法、爬山法等,而在热工系统中单纯形法、专家整定法应用较广。
上述几种方法对于控制模型精确的线性系统取得很好的控制效果,但对于非线性、时变系统的控制较差[3]。
单纯形法对初值优劣性敏感度高,易陷入局部最优解,造成优化失败;专家整定法需要太多的经验作数据支撑,不同的目标函数对应不同的数据参数,而整理庞大的专家数据库是一项繁重而又耗时的工程。
因此,寻求一种自适应PID 控制器参数的整定方法实现在线自适应参数的优化工作,具有重要的理论研究意义和工程应用价值。
1归一化遗传算法归一化遗传算法(Normalized Genetic Algorithm )是在传统的一般GA 的基础上,对编码方式和控制算子进行改进、优化衍生的一种遗传算法。
其算法的具体步骤如下:1.1实数编码定义采用实数编码,令单个染色体,(i=1,2,3);个体长度(j=1,2,…n),n 为种群数量;1.2目标函数经过PID 控制器三个参数的调节,使得输入和输出的偏差最小,即求解δ(t)最小极值问题。
第32卷第2期2005年北京化工大学学报JOURNAL OF BEI J IN G UN IV ERSIT Y OF CHEMICAL TECHNOLO GYVol.32,No.22005基于改进遗传算法的PID 参数整定策略宋洪法1 靳其兵1 赵 梅2(1.北京化工大学信息科学与技术学院,北京 100029;2.苏州科技学院电子系,江苏苏州 215011)摘 要:针对简单遗传算法(SG A )收敛速度慢、易于早熟等缺点,在前人研究成果的基础上,提出动态调整搜索空间策略,对遗传算法进行多步渐进搜索。
并采用改进的自适应交叉算子和自适应变异算子,结合兼顾性能指标和响应过程平衡的适配函数,以多种改进方式相结合的遗传算法对PID 参数进行迭代寻优整定。
仿真结果表明:当被控对象存在较大纯滞后、时间常数特性时,采用本方法优化PID 控制器参数可获得比较满意的调节效果。
关键词:遗传算法;自适应交叉;早熟;PID 参数整定中图分类号:TP273收稿日期:2004205206基金项目:中国石化总公司资助项目(X503014);中国石油天然气集团公司资助项目(03E7042)第一作者:男,1981年生,硕士生E 2mail :songhongfa @ 目前PID 参数整定方法主要有两种,一种是经验整定法,另一种是智能整定方法[1]。
前者算法简单,容易实现,但缺乏灵活性;后者具有很强的自适应能力,但算法比较复杂,无法满足现场的快速响应要求。
因此,既要有自适应能力又要求算法相对简单的PID 自整定技术成为控制界学者研究的努力方向。
简单遗传算法(SG A )已被证明不能收敛到全局最优解[2]。
文献[326]对自适应交叉和变异概率作了一定分析;文献[7]给出了遗传算法适配函数的一般构造原则以及遗传算法的自适应机制。
本文在综合考虑上述研究成果的同时,分析发现:遗传算法的初值给定范围与其搜索效率有很大的关系,即搜索初值越接近最优值,搜索范围越小,遗传算法的搜索效率就越高。
摘要本文使用的是遗传算法对PID控制器参数的整定,PID控制器是过程控制中应用最为广泛的控制方法,PID控制理论成熟、算法简单、鲁棒性好、可靠性高。
控制器参数的选择决定了控制的稳定性和快速性,关乎系统的可靠性。
因此,PID 控制器参数整定问题是自动控制领域研究的一个重要内容。
实际工业生产过程往往具有非线性、时变性,人工试凑的参数整定方法往往整定不良、性能不佳,对运行工况的适应性很差。
本文基于遗传算法对数字PID控制器进行参数整定,可以提高优化性能,缩短整定时间。
关键词:数字PID控制器;参数整定;遗传算法;二次性能指标1引言PID控制作为比较成熟的控制技术广泛应用于工业生产过程,目前绝大多数底层控制都采用PID控制器。
实际应用中控制器的参数往往采用实验试凑的方法人工整定,该方法往往整定不良、性能不佳,而且对运行工况的适应性很差。
近年来随着计算机技术的广泛应用,人工智能算法PID整定策略发展迅速,如模糊PID、专家PID、神经元网络PID以及遗传算法等。
这些算法能够实现提高优化性能,缩短整定时间,实际应用方便的控制目标。
2PID控制器PID控制器是将偏差的比例(P)、积分(I)、微分(D)通过线性组合构成控制量,对被控对象进行控制的。
模拟PID控制的系统原理图如图1所示。
图1. 模拟PID 控制的系统原理图模拟PID 控制规律为位置式:()()()()01=++tp DI de t u t k e t e t dt T T dt ⎡⎤⎢⎥⎣⎦⎰(1) 当系统采样周期为T 时,对上式离散化处理,可得到离散位置式PID 控制表达式:()()()()()=1--1=++kp i dj e k e k u k k e k k e j T k T ∑(2) 式中=/i p I k k T ,=d p D k k T 。
增量式PID 控制表达式可以表示为:()()()=-1+u k u k u k ∆(3)()()()()()()()()()=--1++-2-1+-2p i d u k k e k e k k e k k e k e k e k ∆(4)3 遗传算法遗传算法(Genetic Algorithm )是模拟达尔文生物进化论的自然选择和遗传学机理的生物进化过程的计算模型,将达尔文生物进化理论引入参数寻优之中,适应度高的个体越容易被保留,经过若干代数遗传操作,种群各个体的适应度不断提高,直至满足一定的极限条件,获得优化问题最优解。
第19卷 第3期2006年6月传感技术学报CHIN ES E JOURNAL OF S ENSORS AND ACTUA TORSVol.19 No.3J un.2006N eural N et work PID Control Method and Its Application on OptimizationW U X i ao 2j i ng(I nf .Tech.&S ci.S chool ,Zhanj iang N ormal College ,Zhanj iang Guang dong 524048,China )Abstract :Considering t he fact t hat t he initial value of neural network PID controller affected t he system performance ,a neural network PID cont rol met hod based on parameters optimization via modified GA is p resented ,in which parameters of t he PID cont roller are optimized off 2line using GA ,t he result of optimi 2zation is regarded as initial value of p roportion ,integral and differential.The neural network PID control system is devised according to t he above met hod.The experimental result s to level process indicate t hat t he proposed app roach possesses satisfactory stability and robust ness.K ey w ords :Genetic algorit hm (GA );neural network ;PID cont roller ;level process EEACC :1293基于改进遗传算法寻优的神经网络PID 控制及应用伍筱菁(湛江师范学院信息科技学院,广东湛江524048)收稿日期:2005210212作者简介:伍筱菁(19642)女,硕士,高级工程师,研究方向为电气自动化及其应用,ls 2wxj @摘 要:根据神经网络PID 控制器初值的选取影响系统控制性能的特点,提出了一种基于改进遗传算法寻优的神经网络PID 控制方法。
基于遗传算法的PID参数优化目录1 绪论 (1)1.1 选题意义与研究价值 (1)1.1.1 PID控制器 (1)1.1.2 PID 控制器参数优化分类 (3)1.1.3 遗传算法的简介 (6)1.2国内外研究现状 (7)1.3 本文的主要研究内容 (7)2 遗传算法 (8)2.1 遗传算法概要 (8)2.2 基本遗传算法的实现技术 (9)2.2.1算法流程 (9)2.2.2 编码方法 (10)2.2.3 适应度函数 (10)2.2.4 选择、交叉、变异算子 (11)2.3 遗传算法与其他算法比较 (11)2.4 遗传算法优点 (13)3 基于遗传算法的PID控制器参数优化 (14)3.1 传统遗传算法的PID整定 (14)3.2 算法步骤 (15)3.3 系统仿真—MATLAB语言 (16)3.3.1 遗传算法的参数设置 (16)3.3.2 MATLAB 遗传算法操作 (16)4 基于遗传算法的PID参数优化的应用 (18)4.1 柴油机调速系统模型概述 (18)4.1.1 测速环节 (18)4.1.2 柴油机 (19)4.1.3柴油机控制系统模型 (19)4.1.4 数学模型的建立 (19)4.2 柴油机调速系统的PID参数优化设计与仿真 (20)4.3 基于遗传算法优化柴油机调速系统PID参数 (22)结论 (25)1 绪论1.1 选题意义与研究价值20世纪30年代以来,自动化生产飞速发展,取得了惊人的成就,过程控制是工业自动化中的一个重要分支。
生产对过程控制的要求为安全性、稳定性以及经济性,在很多情况下,PID控制器就可以实现其控制任务,而且,它也以自身结构简单、容易实现、鲁棒性强等优点,在各个工业生产控制中占据着主导地位。
PID控制器的设计和应用,其核心问题就是参数的整定与优化,合适的控制器参数会使得生产更为高效与安全,在方案设计合理的基础上,参数的整定将会影响到控制器的质量[1]。
随着现代控制理论的建立与完善,过程控制的方法和思路也在不断创新,与此同时,为了适应日益提高的生产工艺,过程控制的要求也越来越高。
总第233期2009年第3期计算机与数字工程Computer&D ig ital Eng ineer ingV o l.37No.378基于改进遗传算法的PID参数寻优与控制器设计*成学亮尉宇王涛(武汉科技大学信息科学与工程学院武汉430080)摘要相比传统的调节方法,遗传算法具有更好的鲁棒性、最优性,能较好的实现参数的自动化调节。
对标准遗传算法(SGA)进行了分析、研究,并在SGA的基础上进行了改进。
改进的遗传算法从提高全局搜索性能和加快收敛速度出发,提出了改进的选择算子、交叉算子和变异算子,仿真结果表明,改进的遗传算法的全局搜索性能和收敛速度远远优于标准遗传算法。
关键词遗传算法PID控制器参数优化中图分类号T P301.6Parameters Optimizatio n and Design f or PID ControllerBased on a New Genetic AlgorithmCheng X ue liang W ei Y u W ang T ao(D ept.of Inf or mat io n Scie nce and Eng ineer ing,W uhan U niver sity o f Science and T echno lo gy,W uha n430081)A bstract Co mpare d w ith the c omm on m ethods,the tuning me thod based on G A can g et bette r pa ram eter s,with few er limits.T he author a naly zed and studie d the standar d gene tic alg or ithms(G A),impr o ved the algo r ithm based on SG A.A dded so me new impr ov ed steps,impr ov ed alg or ithm eff iciently so lves the pr oblem o f g lo ba l co nver gence and im-pr ov es the co nver ge nce speed.T he ne w steps are se lect oper ato r、cr o sso ver oper ato r and mutation oper ato r.T he globa l conv erg ence and the co nv er gence speed o f impro ve d a lg or ithm are m or e sa tisf ie r tha n SG A.Key words g enetic a lg or ithms,PI D contr o ller,par ameter tuningClass Nu mber T P301.61前言目前随着现代工业控制过程和环境的日趋复杂化,对PID控制系统的控制品质提出了更高的要求。
基于遗传算法的PID参数整定张力;魏静;张淑娟【摘要】Thermal processes often have large inertia and lag characteristic.This paper applied the state variable technique and the phase compensating technique first to the controlled objects.The large inertia and lag characteristic of the controlled object can be compensated by using large-lag compensation technique.Furthermore,use the modified GA to tune the PID parameters.The simulation results have shown that this control strategy is effective.%由于大滞后大惯性的热工被控对象使用简单的PID控制器很难取得很好的效果。
因此,在采用遗传算法对PID控制器参数进行寻优的基础上,引入大滞后补偿技术(状态变量技术和相位补偿技术),先补偿被控对象的滞后和惯性,再采用遗传算法寻优,取得了良好效果。
【期刊名称】《山东电力技术》【年(卷),期】2011(000)006【总页数】4页(P64-67)【关键词】遗传算法;大滞后补偿技术;PID控制【作者】张力;魏静;张淑娟【作者单位】山东电力工程咨询院有限公司,山东济南250013;山东电力工程咨询院有限公司,山东济南250013;山东电力工程咨询院有限公司,山东济南250013【正文语种】中文【中图分类】TK3230 引言PID控制是工业过程控制中应用最广的策略之一,因此PID控制器参数的优化成为人们关注的问题,它直接影响控制效果的好坏,并和系统的安全、经济运行有着密不可分的关系。
基于遗传算法的PID参数整定1引言传统的比例、积分、微分控制,即PID控制具有算法简单、鲁棒性好和可靠性高等优点,已经被广泛用于工业生产过程。
但工程实际中,PID控制器的比例、积分和微分调节参数往往采用实验加试凑的方法由人工整定。
这不仅需要熟练的技巧,往往还相当费时。
更为重要的是,当被控对象特性发生变化,需要控制器参数作相应调整时,PID控制器没有自适应能力,只能依靠人工重新整定参数,由于经验缺乏,整定结果往往达不到最优值,难以满足实际控制的要求。
考虑生产过程的连续性以及参数整定费事费力,这种整定实际很难进行。
所以,人们从工业生产实际需要出发,基于常规PID控制器的基本原理,对其进行了各种各样的改进。
近年来许多学者提出了基于各种智能算法的PID整定策略,比如模糊PID、神经元网络PID等等。
然而,这些先进算法都要求对被控对象有很多的先验知识,在实际应用中往往难于做到。
随着计算技术的发展,遗传算法有了很大的发展。
将遗传算法用于控制器参数整定,已成为遗传算法的重要应用之一。
本文介绍基于遗传算法的PID参数整定设计方法。
这是一种寻求全局最优的控制器优化方法,且无需对目标函数微分,可提高参数优化效果,简化计算过程。
仿真实例表明该方法与其他传统寻优方法相比,在优化效果上具有一定的优势。
2遗传算法简介2.1 遗传算法的基本原理遗传算法是John H.Holland根据生物进化的模型提出的一种优化算法。
自然选择学说是进化论的中心内容。
根据进化论,生物的发展进化主要有三个原因:即遗传、变异和选择。
遗传算法基于自然选择和基因遗传学原理的搜索方法,将“优胜劣汰,适者生存”的生物进化原理引入待优化参数形成的编码串群体中,按照一定的适应度函数及一系列遗传操作对各个体进行筛选,从而使适应度高的个体被保留下来,组成新的群体;新群体包含上一代的大量信息,并且引入了新的优于上一代的个体。
这样周而复始,群体中各个体适应度不断提高,直至满足一定的极限条件。
Science &Technology Vision科技视界基于遗传算法的改进PID 控制器设计及应用Design and Application of Improved PID Controller Based on Genetic Algorithm丁浩浩胡士成(温州大学,浙江温州325000)【摘要】提出了一种基于遗传算法优化改进的单神经元自适应PID 控制算法,避免一些参数及权系数的在线修正参考实验经验的问题。
该算法有两部分构成。
第一部分就是改进的单神经元自适应PID 控制D 、P 、I 的值,第二部分结合遗传算法在改进的单神经元自适应PID 控制的同时寻求合适的学习效率以及比例系数。
通过柴油机调速中电磁执行器仿真实例表明,该方法取得了很好的效果。
【关键词】遗传算法;单神经元;电磁执行器;仿真【Abstract 】An improved single neuron adaptive PID control algorithm based on genetic algorithm is proposed to avoid the on-line correction of some parameters and weights.The algorithm consists of two parts.The first part is the improved single neuron adaptive PID control D,P,I value,the second part of the combination of genetic algorithm and the improved single neuron adaptive PID control for learning efficiency and proportion coefficient.The simulation example of electromagnetic actuator in diesel engine speed regulation shows that this method can achieve good results.【Key words 】Genetic algorithm;Single neuron;Eelectromagnetic actuator ;Simulation※基金项目:2016年校级创新创业训练计划基于多视成像的瓯柑品质无损检测研究(JWDC2016052);2016年校级创新创业训练计划基于特征变量筛选的糖度近红外预测模型的优化(JWDC2016058)。