赫尔维茨判据
- 格式:pptx
- 大小:175.65 KB
- 文档页数:5
第五章简介:本章介绍了单输入单输出控制系统稳定性的定义及其判定依据。
对于不同的系统,稳定性的定义不同。
系统的稳定性指标是控制系统设计过程中需要考虑的众多性能指标中最重要的指标,不稳定的系统是无法使用的。
主要包括赫尔维茨判据、劳斯判据、幅角原理、奈奎斯特稳定性判据等概念.重点是赫尔维茨稳定性判据和劳斯稳定性判据及其在系统分析中的应用.难点是应用复变函数的幅角原理推导奈奎斯特稳定性判据和对稳定裕度的理解。
随堂测试:一、知识点名称1:控制系统稳定性的基本概念1。
是保证控制系统正常工作的先决条件。
()A.稳定性B.快速性C.准确性D.连续性正确答案:A解析:不稳定的系统是无法使用的。
2。
是控制系统最重要的性能指标。
()A.稳定性B.快速性C.准确性D.连续性正确答案:A解析:稳定性是控制系统最重要的性能指标知识点名称2:单输入单输出控制系统稳定的条件1.单输入单输出控制系统稳定的条件为()A 特征方程根具有副实部B特征方程根具有副实部C极点位于复平面的右半部D极点位于虚轴上正确答案:A解析:单输入单输出控制系统稳定的充分必要条件为特征方程根全部具有副实部2。
某单位反馈系统的开环传递函数为,则该系统稳定的K值范围为() A.K〉0 B。
K>1 C。
0〈K<10 D K〉-1正确答案:A解析:其特征方程为,根据二阶螺丝准则和朱里准则,该系统稳定条件为;所以的K的取值范围为K〉0知识点名称3:赫尔维茨稳定性判据1。
赫尔维茨矩阵的各项主子式行列式的值全部为正,是线性系统稳定的条件。
()A.充分 B 必要C充要 D 即不充分也不必要正确答案:C解析:线性系统稳定的充要条件赫尔维茨矩阵的各项主子式行列式的值全部为正。
2。
如果满足主子式前提下,若所有次顺序赫尔维茨矩阵的主子式为正,则所有次顺序赫尔维茨矩阵的主子式为正。
()A BC D正确答案:B解析:如果满足条件,若所有奇次顺序赫尔维茨矩阵的主子式为正,则所有偶次顺序赫尔维茨矩阵的主子式必为正;反之亦然。
第三章控制系统的时域分析法3.2 劳斯-霍尔维茨稳定性判据稳定性是控制系统最重要的问题,也是对系统最基本的要求。
控制系统在实际运行中,总会受到外界和内部一些因素的扰动,例如负载或能源的波动、环境条件的改变、系统参数的变化等。
如果系统不稳定,当它受到扰动时,系统中各物理量就会偏离其平衡工作点,并随时间推移而发散,即使扰动消失了,也不可能恢复原来的平衡状态。
因此,如何分析系统的稳定性并提出保证系统稳定的措施,是控制理论的基本任务之一。
常用的稳定性分析方法有:1. 劳斯-赫尔维茨(Routh-Hurwitz)判据:这是一种代数判据。
它是根据系统特征方程式来判断特征根在S平面的位置,来判断系统的稳定性.2. 根轨迹法:这是一种利用图解来系统特征根的方法。
它是以系统开环传递函数的某一参数为变量化出闭环系统的特征根在S平面的轨迹,从而全面了解闭环系统特征根随该参数的变化情况。
3. 奈魁斯特(Nyquist)判据:这是一种在复变函数理论基础上建立起来的方法。
它根据系统的开环频率特性确定闭环系统的稳定性,同样避免了求解闭环系统特征根的困难。
这一方法在工程上是得到了比较广泛的应用。
4. 李雅普诺夫方法上述几种方法主要适用于线性系统,而李雅普诺夫方法不仅适用于线性系统,也适用于非线性系统。
该方法是根据李雅普诺夫函数的特征来决定系统的稳定性。
一、稳定性的概念稳定性的概念可以通过图3-31所示的方法加以说明。
考虑置于水平面上的圆锥体,其底部朝下时,我们施加一个很小的外力(扰动),圆锥体会稍微产生倾斜,外作用力撤消后,经过若干次摆动,它仍会返回到原来的状态。
而当圆锥体尖部朝下放置时,由于只有一点能使圆锥体保持平衡,所以在受到任何极微小的外力(扰动)后,它就会倾倒,如果没有外力作用,就再也不能回到原来的状态。
因此,系统的稳定性定义为,系统在受到外作用力后,偏离了最初的工作点,而当外作用力消失后,系统能够返回到原来的工作点,则称系统是稳定的。

劳斯-赫尔维茨稳定判据内容劳斯–赫尔维茨稳定性判据(英语:Routh–Hurwitz stability criterion)是控制理论中的一个数学测试,是线性时不变系统(LTI)稳定的充分必要条件。
劳斯测试是由英国数学家爱德华·劳斯在1876年提出的快速算法,可以判断一线性系统其特征多项式的根是否都有负的实部。
德国数学家阿道夫·赫维兹在1895年独立的提出将多项式的系数放到一个方阵中(此方阵称为赫维兹矩阵),证明多项式稳定当且仅当赫维兹矩阵的主要子矩阵其行列式形成的数列均为正值。
二个程序是等价的,而劳斯测试提供一个有效计算赫维兹行列式的方法。
满足劳斯–赫尔维茨稳定性判据的多项式称为赫尔维茨多项式。
详解:此稳定性判据之所以重要,是因为若线性系统之特征方程式的根p均有负的实部,表示其解e为稳定的(BIBO稳定)。
因此稳定性判据提供了方式,可以在不求解线性系统的运动方程的情形下,判断其是否只有稳定解。
对于离散系统,对应稳定性的测试可以由Schur–Cohn判据、Jury稳定性判据及Bistritz稳定性判据来判断。
随着电脑的进步,此稳定性判据变的较少使用,另一种判断的方式则是用数值方法直接求解多项式,得到其解的近似值。
劳斯测试可以由辗转相除法以及在计算柯西指标时用施图姆定理来推导。
赫尔维茨利用另一种方式来推导其稳定性判据。
利用辗转相除法求解:劳斯–赫尔维茨稳定性判据和劳斯–赫尔维茨定理有关。
由定理的陈述,可得其中:1)p为多项式ƒ(z)的根中实部为负值的个数。
2)q为多项式ƒ(z)的根中实部为正值的个数。
(此假设ƒ(z)的根都不在虚轴上)3)w(x)为由施图姆定理得到的变号数(中间利用连续的辗转相除法),其中,y为实数。
根据代数基本定理,每个n次的多项式在复数平面上会有n个根(也就是,对于根都不在虚轴上的ƒ,p+q=n)。
因此可得到ƒ为(稳定的)赫尔维茨多项式当且仅当p−q=n。
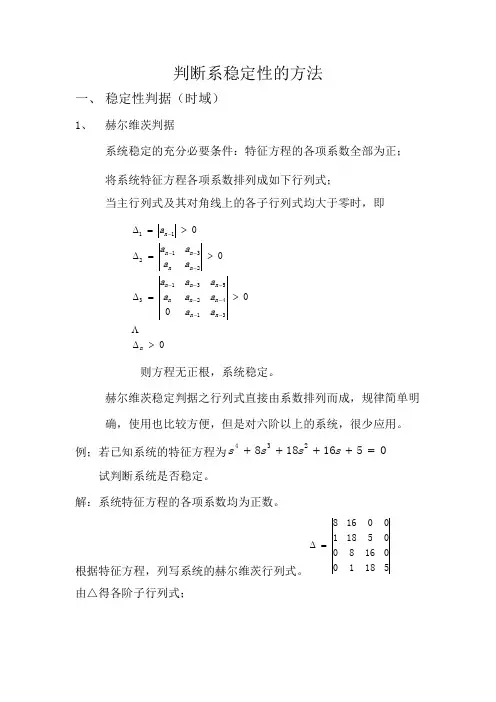
判断系稳定性的方法一、 稳定性判据(时域)1、 赫尔维茨判据系统稳定的充分必要条件:特征方程的各项系数全部为正; 将系统特征方程各项系数排列成如下行列式;当主行列式及其对角线上的各子行列式均大于零时,即00031425313231211>∆>=∆>=∆>=∆-----------n n n n n n n n n n n n n n a a a a a a a a a a a a a Λ则方程无正根,系统稳定。
赫尔维茨稳定判据之行列式直接由系数排列而成,规律简单明确,使用也比较方便,但是对六阶以上的系统,很少应用。
例;若已知系统的特征方程为0516188234=++++s s s s试判断系统是否稳定。
解:系统特征方程的各项系数均为正数。
根据特征方程,列写系统的赫尔维茨行列式。
5181016800518100168=∆由△得各阶子行列式;8690017281685181016801281811680884321>=∆=∆>==∆>==∆>==∆各阶子行列式都大于零,故系统稳定。
2、 劳思判据(1)劳思判据充要条件:A 、系统特征方程的各项系数均大于零,即a i >0;B 、劳思计算表第一列各项符号皆相同。
满足上述条件则系统稳定,否则系统不稳定,各项符号变化的次数就是不稳定根的数目。
(2)劳思计算表的求法:A 、列写劳思阵列,并将系统特征方程的系数按如下形式排列成列首两行,即:111212432134321275311642w s v s u u s c c c c s b b b b s a a a a s a a a a s n n n n n n n n n n n n MM MMMMΛΛΛΛ----------B 、计算劳思表Λ176131541213211-------------=-=-=n n n n n n n n n n n n n n n a a a a a b a a a a a b a a a a a b系数b i 的计算要一直进行到其余的b i 值都等于零为止。
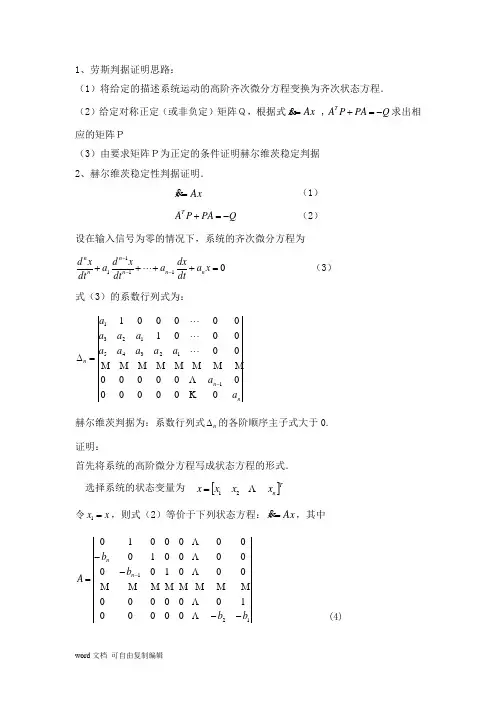
1、劳斯判据证明思路:(1)将给定的描述系统运动的高阶齐次微分方程变换为齐次状态方程.(2)给定对称正定(或非负定)矩阵Q,根据式Ax x= ,Q PA P A T -=+求出相应的矩阵P(3)由要求矩阵P为正定的条件证明赫尔维茨稳定判据2、赫尔维茨稳定性判据证明.Ax x= (1) Q PA P A T -=+ (2)设在输入信号为零的情况下,系统的齐次微分方程为01111=++⋅⋅⋅++---x a dtdx a dt x d a dt x d n n n n n n (3) 式(3)的系数行列式为:n n n a a a a a a a a a a a 0000000000000000010000011123451231-⋅⋅⋅⋅⋅⋅⋅⋅⋅=∆ 赫尔维茨判据为:系数行列式n ∆的各阶顺序主子式大于0.证明:首先将系统的高阶微分方程写成状态方程的形式.选择系统的状态变量为 []T n x x x x 21=令x x =1,则式(2)等价于下列状态方程:Ax x= ,其中 1210000010000000001000000100000010b b b b A n n----=-(4)该矩阵特点是:主对角线上除最后一个元素外,其余元素均为0;主对角线以上各元素为1;主对角线以下各元素从第二行开始依次为-bn 到-b1。
其次,应给定矩阵Q,并根据式(2)去求矩阵P设⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=21200000000b Q (5) 这是一个对称非负定矩阵,由此可知李雅普诺夫函数的导数为 2212nT x b Qx x V -=-= 。
只要x1,x2,…,xn 不全都为零,则0≠n x ,于是()x V 不可能恒为零.所以按式(4)选定的矩阵Q是合理的.再假设矩阵P是对角线矩阵⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=-121000000000000p p p p P n n (6) 将式(4)、式(5)、式(6)代人式(2),即可得 ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=-11212112000000000000b b b b b b b b b P n n 最后检验矩阵P的正定性.如欲系统的半衡点是大范围渐近稳定的,则矩阵P应是正定的,亦即矩阵P主对角线上各元素均应大于零,即有 0,0,012121>>>b b b b b b n 。
判断系稳定性的方法一、稳定性判据(时域)1、赫尔维茨判据系统稳定的充分必要条件:特征方程的各项系数全部为正 将系统特征方程各项系数排列成如下行列式;当主行列式及其对角线上的各子行列式均大于零时,即A = a >01 n -1a a >0A =n -n -3 2 a a n n -2a a an -n -3 n -5 A = a a a >0 3 n n -2 n -4a an -1 n -3A > 0n则方程无正根,系统稳定。
赫尔维茨稳定判据之行列式直接由系数排列而成,规律简单明 确,使用也比较方便,但是对六阶以上的系统,很少应用。
例;若已知系统的特征方程为S 4+8S 3+18S 2+16S +5=0试判断系统是否稳定。
解:系统特征方程的各项系数均为正数。
81600人11850an -1anan -3an -2an -5an -A= 0a a n• nn -20 00000 00 00 :00a 01aa20000实用标准1A二08160根据特征方程,列写系统的赫尔维茨行列式。
01185由△得各阶子行列式;A1 =8=8 >08 16=128 >0A2 —1 188 1 6 0A=1 18 5=1728>030 8 16A4=A=8690>0各阶子行列式都大于零,故系统稳定。
2、劳思判据(1)劳思判据充要条件:A、系统特征方程的各项系数均大于零,即a>0;iB、劳思计算表第一列各项符号皆相同。
满足上述条件则系统稳定,否则系统不稳定,各项符号变化的次数就是不稳定根的数目。
(2)劳思计算表的求法:A、列写劳思阵列,并将系统特征方程的系数按如下形式排列成列首两行,即:s n an anananS n-1 a a a an n—n—n S n— b b b b1 2 3 4 s n-3 c c c c1 2 3 4S2 u1 u 2S1 v1 S0 wB 、计算劳思表b = 1 aa —aa —n~1_n~2n_n~3- an -1b = 2 aa —aa —n~1~n_4n_n~5- an -1b = 3aa —aa—n~1_n~6n_n~7a系数b 的计算要一直进行到其余的b 值都等于零为止。
判断系稳定性的方法一、 稳定性判据(时域)1、 赫尔维茨判据系统稳定的充分必要条件:特征方程的各项系数全部为正; 将系统特征方程各项系数排列成如下行列式; 当主行列式及其对角线上的各子行列式均大于零时,即00031425313231211>∆>=∆>=∆>=∆-----------n n n n n n n n n n n n n n a a a a a a a a a a a a a则方程无正根,系统稳定。
赫尔维茨稳定判据之行列式直接由系数排列而成,规律简单明确,使用也比较方便,但是对六阶以上的系统,很少应用。
例;若已知系统的特征方程为0516188234=++++s s s s试判断系统是否稳定。
解:系统特征方程的各项系数均为正数。
根据特征方程,列写系统的赫尔维茨行列式。
5181016800518100168=∆由△得各阶子行列式;8690017281685181016801281811680884321>=∆=∆>==∆>==∆>==∆各阶子行列式都大于零,故系统稳定。
2、 劳思判据(1)劳思判据充要条件:A 、系统特征方程的各项系数均大于零,即a i >0;B 、劳思计算表第一列各项符号皆相同。
满足上述条件则系统稳定,否则系统不稳定,各项符号变化的次数就是不稳定根的数目。
(2)劳思计算表的求法:A 、列写劳思阵列,并将系统特征方程的系数按如下形式排列成列首两行,即:111212432134321275311642w s v s u u s c c c c s b b b b s a a a a s a a a a s n n n n n n n n n n n n----------B 、计算劳思表176131541213211-------------=-=-=n n n n n n n n n n n n n n n a a a a a b a a a a a b a a a a a b系数b i 的计算要一直进行到其余的b i 值都等于零为止。
第三章控制系统的时域分析法劳斯-霍尔维茨稳固性判据稳固性是控制系统最重要的问题,也是对系统最大体的要求。
控制系统在实际运行中,总会受到外界和内部一些因素的扰动,例如负载或能源的波动、环境条件的改变、系统参数的转变等。
若是系统不稳固,当它受到扰动时,系统中各物理量就会偏离其平衡工作点,并随时刻推移而发散,即便扰动消失了,也不可能恢恢复来的平衡状态。
因此,如何分析系统的稳固性并提出保证系统稳固的办法,是控制理论的大体任务之一。
常常利用的稳固性分析方式有:1. 劳斯-赫尔维茨(Routh-Hurwitz)判据:这是一种代数判据。
它是按照系统特征方程式来判断特征根在S平面的位置,来判断系统的稳固性.2. 根轨迹法:这是一种利用图解来系统特征根的方式。
它是以系统开环传递函数的某一参数为变量化出闭环系统的特征根在S平面的轨迹,从而全面了解闭环系统特征根随该参数的转变情形。
3. 奈魁斯特(Nyquist)判据:这是一种在复变函数理论基础上成立起来的方式。
它按照系统的开环频率特性肯定闭环系统的稳固性,一样避免了求解闭环系统特征根的困难。
这一方式在工程上是取得了比较普遍的应用。
4. 李雅普诺夫方式上述几种方式主要适用于线性系统,而李雅普诺夫方式不仅适用于线性系统,也适用于非线性系统。
该方式是按照李雅普诺夫函数的特征来决定系统的稳固性。
一、稳固性的概念稳固性的概念能够通过图3-31所示的方式加以说明。
考虑置于水平面上的圆锥体,其底部朝下时,咱们施加一个很小的外力(扰动),圆锥体会略微产生倾斜,外作使劲撤消后,通过若干次摆动,它仍会返回到原来的状态。
而当圆锥体尖部朝下放置时,由于只有一点能使圆锥体维持平衡,所以在受到任何极微小的外力(扰动)后,它就会倾倒,若是没有外力作用,就再也不能回到原来的状态。
因此,系统的稳固性概念为,系统在受到外作使劲后,偏离了最初的工作点,而当外作使劲消失后,系统能够返回到原来的工作点,则称系统是稳固的。
多项式hurwitz准则英文回答:Hurwitz Stability Criterion for Polynomials.The Hurwitz stability criterion is a mathematical tool used to determine the stability of a linear time-invariant system described by a polynomial equation. It is namedafter the German mathematician Adolf Hurwitz, who first formulated the criterion in 1895.The Hurwitz stability criterion states that a polynomial.$$p(s)=a_ns^n+a_{n-1}s^{n-1}+\cdots+a_1s+a_0$$。
is stable (i.e., all its roots have negative real parts) if and only if all of the following conditions are satisfied:1. All the coefficients of the polynomial are positive(i.e., \(a_i>0\) for all \(i\)).2. The Hurwitz determinants.$$\Delta_1=a_1$$。
$$\Delta_2=\left|\begin{array}{cc}a_1&a_3\\\a_2&a_4\end{arr ay}\right|$$。
$$\vdots$$。
$$\Delta_n=\left|\begin{array}{cccc}a_1&a_3&\cdots&a_{2n-1}\\\a_2&a_4&\cdots&a_{2n}\end{array}\right|$$。