状态方程
- 格式:ppt
- 大小:1.04 MB
- 文档页数:38


驱动方程和状态方程
驱动方程和状态方程是描述时序电路的两个重要方程,具体如下:
1.驱动方程:是描述存储电路输入的,是电路输入和状态的函数。
2.状态方程:是描述下一状态的,是当前状态和输入的函数。
时序电路的分析方法:写出各个驱动器的驱动方程和状态方程,并写出输出方程,根据状态方程、输出方程,画出状态转移图,从而分析其功能。
时序电路的设计方法:分析所需的逻辑功能,画出其状态转移图,并注意能否化简(同时要求选定触发器的个数),做出对应的卡诺图,并由主卡诺图做出各个触发器的子卡诺图,从而得到各触发器的状态方程,将状态方程化简为触发器响应的特性方程形式,从而(反解析)得到其驱动方程。

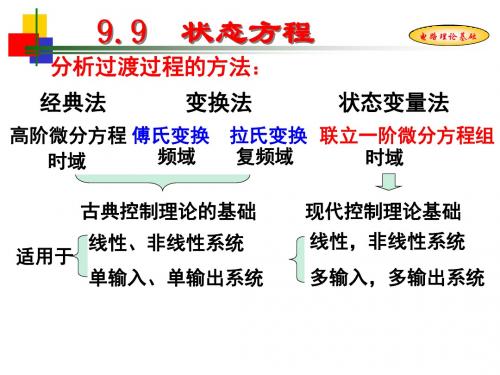
状态方程和输出方程状态方程和输出方程是系统理论中的重要概念,用于描述动态系统的行为。
状态方程描述了系统的状态如何随时间变化,而输出方程则描述了系统的输出如何由状态决定。
在这篇文章中,我们将详细介绍状态方程和输出方程的概念、推导方法和应用。
一、状态方程状态方程又称为状态空间方程或系统方程,用数学表示为:x(t)=A·x(t-1)+B·u(t)其中,x(t)为系统的状态向量,表示系统在其中一时刻的状态;A为状态转移矩阵,描述了系统的状态如何随时间变化;x(t-1)为系统在上一时刻的状态;B为输入矩阵,描述了外部输入信号如何影响系统的状态;u(t)为外部输入信号,表示系统在其中一时刻的输入。
状态方程的物理意义是描述系统的动态行为。
通过状态方程,我们可以了解系统的状态如何由前一时刻的状态和当前的输入决定。
状态方程是描述系统动态行为的基础,可以用于系统的建模、分析和控制。
推导状态方程的方法有两种:物理建模和数学建模。
物理建模是通过系统的物理原理和方程来推导状态方程;数学建模是通过对系统的输入输出进行数学分析,从而推导出状态方程。
物理建模适用于具有物理背景的系统,如机械系统、电路系统等;数学建模适用于所有类型的系统。
二、输出方程输出方程又称为观测方程或测量方程,用数学表示为:y(t)=C·x(t)其中,y(t)为系统的输出向量,表示系统在其中一时刻的输出;C为观测矩阵,描述了系统的输出如何由状态决定;x(t)为系统在其中一时刻的状态。
输出方程的物理意义是描述系统的输出如何由状态决定。
通过输出方程,我们可以了解系统的输出如何与系统的状态相关。
输出方程是描述系统的输出特性的关键,可以帮助我们理解系统的性能和行为。
推导输出方程的方法有直接测量和模型匹配。
直接测量是通过对系统的输出进行实际测量,从而得到输出方程;模型匹配是通过对系统进行数学建模,从而推导出输出方程。
直接测量适用于系统的输出直接可测量的情况;模型匹配适用于系统的输出无法直接测量或想要通过模型进行预测的情况。

§11-6 状态方程一、状态:指在某给定时刻描述网络所需要的一组最少量信息,它连同从该时刻开始的任意输入,便可以确定网络今后的性状。
二、状态变量:描述系统所需要的一组最少量的变量。
三、状态方程:以状态变量为未知量的一组一阶微分方程。
状态变量[,]Tc L X u i =取111CL L L c sC L L c L s du Ci dt diL Ri u u dtdu i dt C di R u i u dt L L L==--+==--+写成矩阵形式.10011C c s L L du u dt C u i di R L dt L L X AX BU ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥--⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦=+标准形式状态变量的选择不唯一, 也可12[,][,]TCC du X x x u dt==取 122212211()C C S C S dx x dtd u du dx R x x u LC RC u u dt LC L LC dt dt==--+++= 写成标准形式()C u t112201011S dx x dt u R dx x LC L LC dt ⎡⎤⎡⎤⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦四、状态方程的列写 1, 直观法1c C du i dt C =对仅含一条电容支路的节点列KCL 方程 1L Ldi u KVL dt L=对仅含一条电感支路的节点列方程例1:列写如下图所示电路的状态方程。
解:选取单一电感回路,如图l 1、l 2所示;状态变量12[,]T L L X i i =取12211112112221211ss L L L di R i u L dtdi R i R i u L dti i i i i +=++==+=整理并消去中间变量i 1、i 2,得1122122225s sL L L L L L d u dt d u dti i i i i i =--+=--+写成标准形式R R 2L21L H1122221251s L L L L d dt u d dt i i i i ⎡⎤⎢⎥⎡⎤--⎡⎤⎡⎤⎢⎥=+⎢⎥⎢⎥⎢⎥--⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦⎢⎥⎣⎦例2:列如下图所示电路的状态方程。
第十四章 状态方程§14-1 电路的状态、状态变量及状态方程一、状态和状态变量经典法分析一阶、二阶电路时,求响应除了要知道电路结构及参数和外加激励之外,还必须知道电路中电容电压,C u 和电感电流C i 的初始值。
有了这些初始值才能确定积分常数,才能确定唯一解...,即电路在换路后任意时刻的情况。
C u 及L i 的初始值称为电路的初始状态..。
只要知道了一个已知电路在换路时的初始状态和换路后作用于电路的外加激励。
就可以确定在换路后任何时刻的电路的响应。
一般意义上的定义: 一个电路在0t t=时的状态..,是指能完全描述在这一时刻电路性能的最小变量组(的值)。
这个变量组中的每一个变量,称为状态变量。
完全描述电路性能──如果给定0t t=时这组变量的值和0t t ≥时的外加激励,就能完全确定电路在0t t ≥的任何时刻的任一响应。
在电路分析中,这些所谓变量,就是各元件(支路)电流、电压(电荷、磁链)。
最小是指这些变量组中每一个变量都是独立的,不可能用其它变量的线性组合来表示。
相应的,电路中0t t =时刻的其它任何一个电压、电流都可以用状态变量和激励的线性组合来表达。
若一个电路中有几个状态变量)( , ),( ),(21t x t x t x n ,这几个状态变量就构成了一个数学上的矢量)(t X 。
(变量组))(t X 称为电路的状态矢量。
⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=)( )()()(21t x t x t x t X n 一个电路可以选出多种不同的状态矢量,但其中最容易选取的是由电容电压)(t u C 、电感电流)(t i L 构成的状态矢量。
结合以上定义和讨论可以看出, )(t u C 及)(t i L 确实满足状态变量的基本定义。
所以,一般在电路中将各独立电容的)(t u C ,各独立电感的)(t i L 作为一组状态变量,有时也可以将)(t q 、)(t ψ作为一组状态变量(多用于非线性电路)。