离散系统的响应
- 格式:pdf
- 大小:300.06 KB
- 文档页数:15
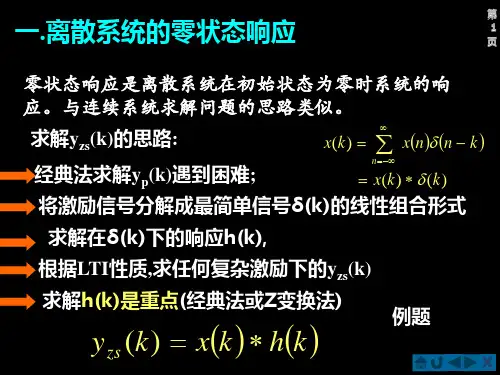
求解离散系统全响应的基本方法和过程离散系统是指系统的输入和输出都是以离散时间点为基准的系统。
在离散系统中,我们常常需要求解其全响应,即系统在时域上的完整响应。
在本文中,我们将介绍求解离散系统全响应的基本方法和过程。
我们需要了解离散系统的模型。
离散系统可以用差分方程表示。
一个简单的离散系统模型可以写作:y(n) = b(0)x(n) + b(1)x(n-1) + ... + b(M)x(n-M) - a(1)y(n-1) - ... - a(N)y(n-N)其中,x(n)为输入信号,y(n)为输出信号,b(0)、b(1)、...、b(M)为输入信号的系数,a(1)、...、a(N)为输出信号的系数。
根据差分方程的形式,我们可以使用递推的方式求解离散系统的全响应。
求解离散系统全响应的基本方法之一是使用差分方程的递推关系。
对于一个一阶差分方程,我们可以通过递推关系来求解其全响应。
递推关系可以写作:y(n) = b(0)x(n) - a(1)y(n-1)其中,y(n)为当前时刻的输出信号,y(n-1)为上一时刻的输出信号,x(n)为当前时刻的输入信号,b(0)为输入信号的系数,a(1)为输出信号的系数。
通过递推关系,我们可以根据已知的初始条件和输入信号,逐步求解出系统的全响应。
对于高阶差分方程,我们可以通过多次使用递推关系来求解其全响应。
假设我们要求解一个二阶差分方程的全响应,可以写作:y(n) = b(0)x(n) + b(1)x(n-1) - a(1)y(n-1) - a(2)y(n-2)我们可以使用递推关系求解出第一个时刻的输出信号y(0),然后再通过递推关系求解出第二个时刻的输出信号y(1),以此类推,直到求解出所有时刻的输出信号。
这样,我们就可以得到离散系统的全响应。
除了使用递推关系,我们还可以使用离散系统的传递函数来求解全响应。
离散系统的传递函数可以通过离散系统的差分方程得到。
传递函数是输入信号和输出信号的关系,它可以用来描述系统的频率响应特性。

离散系统的频率响应分析实验课程:数字信号处理实验内容:实验4离散系统的频率响应分析和零、极点分布院(系则):计算机学院专业:通信工程班级:111班2021年6月7日一、实验目的:增进对离散系统的频率响应分析和零、极点原产的概念认知。
二、实验原理:离散系统的时域方程为y(n-k)=∑pkx(n-k)其变换域分析方法如下:时频域变换y[n]=x[n]*h[n]=系统的频率响应为jωjωjωx[m]h[n-m]⇔y(e)=x(e)h(e)∑p(ejω)p0+p1e-jω+...+pme-jmωh(e)==jωd(e)d0+d1e-jω+...+dne-jnω时域z域变换y[n]=x[n]*h[n]=系统的转移函数为∑x[m]h[n-m]⇔y(z)=x(z)h(z)p(z)p0+p1z-1+...+pmz-mh(z)==d(z)d0+d1z-1+...+dnz-nh(z)=∑pkz∑dkz(1-ξz)∏i-1(1-λz)∏ii=1i=1nξλi上式中的和i称为零、极点。
在matlab中,可以用函数[z,p,k]=tf2zp(num,den)求出有理分式形式的系统迁移函数的零、极点,用函数zplane(z,p)绘制零、极点分布图;也可以用函数zplane (num,den)轻易绘制有理分式形式的系统迁移函数的零、极点分布图。
另外,在matlab中,可以用函数[r,p,k]=residuez(num,den)完成部分分式展开计算;可以用函数sos=zp2sos(z,p,k)完成将高阶系统分解为2阶系统的级联。
三、实验内容及步骤:实验内容:求系统0.0528+0.0797z-1+0.1295z-2+0.1295z-3+0.797z-4+0.0528z-5h(z)=1-1.8107z-1+2.4947z-2-1.8801z-3+0.9537z-4-0.2336z-5的零、极点和幅度频率响应。
程序代码:num=[0.05280.07970.12950.12950.7970.0528];den=[1-1.87072.4947-1.88010.9537-0.2336];freqz(num,den);%0~π中抽样,抽样点缺省(512点)ζnum=[0.05280.07970.12950.12950.7970.0528];den=[1-1.87072.4947-1.88010.9537-0.2336];w=[0pi/8pi/4pi*3/8pi/2pi*5/8pi*3/4];%自己定8个点θh=freqz(num,den,w);subplot(2,2,1);stem(w/pi,abs(h));title('幅度五音')xlabel('数字频率');ylabel('振幅');[h,w]=freqz(num,den,8);%系统在0~π之间均分8份,与“θ”处效果一样wsubplot(2,2,2);stem(w/pi,abs(h));title('幅度五音')xlabel('数字频率');ylabel('振幅');h=freqz(num,den);%系统在0~π之间均分512份,与“ζ”处效果一样subplot(2,2,3);z=10*log(abs(h))plot(z);%与“ζ”处幅度五音效果一样title('分贝幅度五音')xlabel('数字频率');ylabel('振幅');num=[0.05280.07970.12950.12950.7970.0528];den=[1-1.87072.4947-1.88010.9537-0.2336];[z,p,k]=tf2zp(num,den);%谋零极点z%零点p%极点subplot(2,2,4);zplane(z,p);%zplane(num,den)也可以[sos,g]=zp2sos(z,p,k);%二阶系统分解sosg [r,p,k]=residuez(num,den);%部分分式进行rp四、实验总结与分析:本次实验晓得了函数zplane()、freqz()、angle()的用法,原来就是绘制零极点图形和排序数字滤波器h(z)的频率响应以及谋复数的相角。


7-4 离散系统的单位序列响应对于线性时不变离散时间系统,若激励为单位序列)(k δ时,其系统的零状态响应)(k h 称为单位序列响应。
根据激励为单位序列的特点,系统的单位序列响应在时域有不同的求解方法。
一、迭代法对于一阶系统⎭⎬⎫<==-+0 0)()()1()(0k k y k f k y a k y当)()(k k f δ=时,令)()(k h k y =,则有)()1()(0k k h a k h δ=-+0)(=k h 0<k根据此方程及初始状态,可由递推式得)1()()(0--=k h a k k h δ 1)1(1)0(0=--=h a h 00)0()1(a h a h -=-=200)()1()2(a h a h -=-=300)()2()3(a h a h -=-=…k a k h a k h )()1()(00-=--=故可知该一阶系统的单位响应为)()()(0k U a k h k -=可见这种递推法是一个不断迭代过程,又称之为迭代法。
当系统阶数较高时,用这种迭代法求单位序列响应常常难以写成一个闭合的解析表达式。
通常可用其他方法求解。
二、等效初值法当一个零状态系统的激励为单位序列)(k δ时,可知当k >0时,系统激励为零,因此可将单位序列δ(k)激励的作用等效为系统的初始值。
当k >0时,系统等效为一个零输入系统。
所以求系统单位序列响应转化为求系统等效零输入响应。
例7-14 某离散时间系统如图7-20所示。
求系统单位序列响应。
解 由图7-20可得系统的差分方程为)()2(21)1()(k f k y k y k y =-+--当)()(k k f δ=时,)()(k h k y =,即)()2(21)1()(k k h k h k h δ=-+--并且有0)(=k h k <0由迭代法可知等效初始值为1)0(=h 1)1(=h当k >1时,有图 7 - 20⎪⎭⎪⎬⎫===-+--1)1( 1)0(0)2(21)1()(h h k h k h k h其差分方程对应的特征方程为0212=+-λλ解得其特征根为21211j +=λ 21212j -=λ故单位序列响应)(k h 的形式与零输入响应形式相同,即424121)22()22()2121()2121()(ππk j k k j k k k eC e C j C j C k h -+=-++=根据等效初值1)0(21=+=C C h42412222)1(ππj j eC e C h -+=求得41222121πj e j C -=-= 42222121πj ej C =+=所以4)1(cos)22(2][)22()(14)1(4)1(1πππ-=+=+---+k e e k h k k j k j k 0≥k在此例中,把单位序到)(k δ的激励作用等效为一个初值)0(h ,进而递推出h(1),从而较方便地得到单位序列响应)(k h 的闭合式解。
离散系统的频率响应分析和零极点分布离散系统的幅频响应描述了系统对不同频率信号的放大或压缩能力。
幅频响应一般用幅度响应曲线表示,即以输入信号频率为横轴,以输出信号幅度为纵轴绘制的曲线。
幅频响应曲线可以展示离散系统的增益特性,即在不同频率下系统对信号的放大或压缩程度。
幅频响应曲线上的波动和变化可以反映系统对不同频率信号的响应情况。
离散系统的相频响应描述了系统对不同频率信号的相位差。
相频响应也是以输入信号频率为横轴,以输出信号相位为纵轴绘制的曲线。
相频响应可以展示离散系统对不同频率信号的相位延迟或提前情况,即输入信号和输出信号之间的相位差。
相频响应的变化可以反映系统对不同频率信号相位的变化情况。
在频率响应分析中,零极点分布也是非常重要的。
零点是指离散系统传递函数的分子多项式为零的根,极点是指传递函数的分母多项式为零的根。
零极点的分布对离散系统的频率响应和系统特性有着重要的影响。
具体来说,零点会在幅频响应曲线上产生波动或峰值,影响系统的放大或压缩程度。
零点的频率越高,波动或峰值的位置越靠近高频,反之亦然。
而极点会导致幅频响应曲线的趋势变化,影响系统的稳定性和阻尼特性。
极点越接近单位圆,系统越不稳定;极点越远离单位圆,系统越稳定。
相频响应同样受到零点和极点的影响。
零点的频率越高,在相频响应曲线上引起的相位变化越明显。
而极点的频率越接近单位圆,相频响应曲线呈现明显的相位延迟。
极点越远离单位圆,相频响应曲线呈现相位提前的情况。
因此,频率响应分析和零极点分布是研究离散系统特性的重要方法。
通过频率响应分析和零极点分布,我们可以了解离散系统对不同频率输入信号的响应情况、系统的稳定性特点以及系统的放大和压缩能力。
这对于离散系统的设计、控制和优化都有着重要的指导意义。
时域离散系统的基本网络结构时域离散系统是一种常用的信号处理系统,它的基本网络结构由输入信号、输出信号和系统响应组成。
在该网络结构中,输入信号通过系统的某种变换或处理,得到输出信号,其过程可以用离散时间和离散数值来描述。
一个典型的时域离散系统网络结构通常由以下几个组成部分构成:1. 输入信号:即待处理的信号,它可以是任意形式的时域离散信号,例如声音、图像、视频等。
输入信号以离散的时间点为基准,每个时间点对应一个离散数值。
2. 系统响应:系统响应描述了系统对不同输入信号的处理方式。
它是一个离散时间和离散数值定义的函数,通常用差分方程或差分方程组的形式表示。
系统响应可以根据需要进行设计,以实现特定的信号处理功能。
3. 输出信号:系统的处理结果,它经过系统响应的变换或处理之后得到。
输出信号也是一个离散时间和离散数值定义的信号。
在时域离散系统中,输入信号和输出信号用序列表示,序列中的元素对应离散时间点上的数值。
基本的离散系统通常采用线性时不变(LTI)的假设,即线性组合和时间平移可以自由应用于输入信号和系统响应。
这使得系统的分析和设计变得简单而直观。
为了描述时域离散系统的基本网络结构,我们可以将输入信号和系统响应放置在一个框架中,通过箭头表示信号的流动方向,从而得到输入信号到输出信号的整个信号处理过程。
基于系统的不同功能需求,网络结构可以包括多个组件,如滤波器、采样器、量化器、延迟线等。
总之,时域离散系统的基本网络结构由输入信号、输出信号和系统响应组成。
通过对输入信号的变换和处理,系统响应确定了输出信号。
这种网络结构可以用离散时间和离散数值来表示,具有线性时不变的特点,适用于各种信号处理应用,为我们提供了一种有效的工具来处理离散信号。
时域离散系统是一种广泛应用于信号处理、通信系统、控制系统等领域的重要工具。
在时域离散系统中,离散时间和离散数值是其基本特征,因此对系统的分析和设计需要使用离散时间和离散数值的数学方法。
§3.1LTI离散系统的响应•差分与差分方程•差分方程的经典解•零输入响应•零状态响应通信与信息工程学院江帆一、差分与差分方程设有序列f(k),则…,f(k+2),f(k+1),…,f(k-1),f(k-2),…等称为f(k)的移位序列。
仿照连续信号的微分运算,定义离散信号的差分运算。
1. 差分运算t t t f t f t t f t t f t t f tt f t t t ΔΔ−−=Δ−Δ+=ΔΔ=→Δ→Δ→Δ)()(lim )()(lim )(lim d )(d 000离散信号的变化率有两种表示形式:k k k f k f k k f −+−+=ΔΔ)1()()1()()1()1()()(−−−−=∇∇k k k f k f kk f因此,可定义:(1)一阶前向差分定义:Δf(k) = f(k+1) –f(k)(2)一阶后向差分定义:∇f(k) = f(k) –f(k –1)式中,Δ和∇称为差分算子,无原则区别。
本书主要用后向差分,简称为差分。
(3)差分的线性性质:∇[af1(k) + bf2(k)] = a ∇f1(k) + b ∇f2(k)(4)二阶差分定义:∇2f(k) = ∇[∇f(k)] = ∇[f(k) –f(k-1)] = ∇f(k) –∇f(k-1) = f(k)–f(k-1) –[f(k-1) –f(k-2)]= f(k) –2 f(k-1) +f(k-2)(5)m阶差分:∇m f(k) = f(k) + b1f(k-1) +…+ b m f(k-m)2. 差分方程包含未知序列y(k)及其各阶差分的方程式称为差分方程。
将差分展开为移位序列,得一般形式y(k) + an-1y(k-1) +…+ ay(k-n) = bmf(k)+…+ bf(k-m)差分方程本质上是递推的代数方程,若已知初始条件和激励,利用迭代法可求得其数值解。
例3-1-1:若描述某系统的差分方程为y(k) + 3y(k –1) + 2y(k –2) = f(k)已知初始条件y(0)=0,y(1)=2,激励f(k)=2kε(k),求y(k)。
y(k) = –3y(k –1) –2y(k –2) + f(k)y(2)= –3y(1) –2y(0) + f(2) = –2y(3)= –3y(2) –2y(1) + f(3) = 10 ……注:一般不易得到解析形式的(闭合)解。
二、差分方程的经典解y(k) + a n-1y(k-1) +…+ a 0y(k-n) = b m f(k)+…+ b 0f(k-m)与微分方程经典解类似,上述差分方程的解由齐次解和特解两部分组成。
齐次解用y h (k )表示,特解用y p (k )表示,即y (k ) = y h (k ) + y p (k )1. 齐次解y h (k )齐次解是齐次差分方程y(k) + a n-1y(k-1) + …+ a 0y(k-n) = 0的解。
y h (k )的函数形式由上述差分方程的特征根确定。
(齐次解的函数形式见P87表3-1)齐次方程y(k) + a n-1y(k-1) + …+ a 0y(k-n) = 0其特征方程为1 + a n-1λ–1 + …+ a 0λ–n = 0,即λn + a n-1λn–1 + …+ a 0= 0其根λi ( i = 1,2,…,n)称为差分方程的特征根。
λ特征根r 重实根12j a jb eβλρ±±=,一对共轭复根=r 重共轭复根()h y k 齐次解k C λ121210()r r kr r C k C k C k C λ−−−−++++L [cos()sin()]cos()k k C k D k A k C jD θρββρβθ+−=+j 或其中Ae 12112200[cos()cos()cos()]k r r r r r r A k k A k k A k ρβθβθβθ−−−−−−++++++L 单实根()f k 激励cos()sin()k k ββ或()p y k 特解m k ka 1110m m m m P k P k Pk P −−++++L 1110[]r m m m m k P k P k Pk P −−++++L 所有的特征根均不等于1;有r重等于1的特征根;kPa 1110()r r k r r P k P k Pk P a −−++++L 10()k Pk P a +a 不等于特征根;a 等于特征单根;a 等于r重特征根;cos()sin()P k k ββ+Q cos()k θβθ−j 或A ,其中Ae =P+jQj e β±所有的特征根均不等于2. 特解y p (k)特解的函数形式与激励函数的形式有关。
P87表3-2列出了几种典型得f (k )所对应的特解y p (k )。
例3-1-2:若描述某系统的差分方程为y(k)+ 4y(k –1) + 4y(k –2) = f(k)已知初始条件y(0)=0,y(1)= –1;激励f(k)=2k ,k ≥0。
求方程的全解。
特征方程为λ2 + 4λ+ 4=0可解得特征根λ1=λ2= –2,其齐次解y h (k)=(C 1k +C 2) (–2)k特解为y p (k)=P (2)k , k ≥0代入差分方程得P(2)k +4P(2)k –1+4P(2)k–2= f(k) = 2k ,解得P=1/4所以得特解:y p (k)=2k–2, k ≥0故全解为y(k)= y h +y p = (C 1k +C 2) (–2)k + 2k–2, k ≥0 代入初始条件解得C 1=1 , C 2= –1/4三、零输入响应和零状态响应系统的全响应y (k )可以分解为零输入响应y x (k )和零状态响应y f (k )。
y (k )= y x (k ) + y f (k )零输入响应和零状态响应可以分别用经典法求解。
1010()(1)()()(1)()(1)n m m y k a y k a y k n b f k b f k b f k m −−+−++−=+−++−L L 已知单输入-单输出LTI 离散系统的激励为f (k ),其全响应为y (k ),那么,描述该系统激励f (k )与响应y (k )之间的关系的数学模型是n 阶常系数线性差分方程,表示如下:1. 零输入响应系统的激励为零,仅由系统的初始状态引起的响应,称为零输入响应,用y x (k )表示。
在零输入条件下,(1)式可化为齐次方程:10()(1)()0(2)x n x x y k a y k a y k n −+−++−=L 通常,用y (-1),y (-2),…,y (-n)描述系统的初始状态。
(1)(1)(2)(2)(3)()()x x x y y y y y n y n −=−⎫⎪−=−⎪⎬⎪⎪−=−⎭M 一般设定激励是在k =0时刻接入系统的,在k <0时,激励尚未接入,因此(2)的初始状态满足:2. 零状态响应系统的初始状态为零,仅由激励f(k)引起的响应,称为零状态响应,用y f (k )表示。
在零状态条件下,(1)式仍为非齐次方程,其初始条件为零,即零状态响应满足:1010()(1)()()(1)()(1)(2)()0f n f f m m f f f y k a y k a y k n b f k b f k b f k m y y y n −−+−++−=+−++−⎫⎬−=−==−=⎭L L L 利用迭代法分别求得零输入响应和零状态响应的初始值y x (j )和y f (j ) ( j = 0, 1, 2 , …,n –1)()()()f fh p y k y k y k =+零状态响应为:例3-1-3:若描述某离散系统的差分方程为y(k) + 3y(k –1) + 2y(k –2) = f(k)已知激励f(k)=2k , k ≥0,初始状态y(–1)=0, y(–2)=1/2, 求系统的零输入响应、零状态响应和全响应。
(1)y x (k)满足方程y x (k) + 3y x (k –1)+ 2y x (k –2)= 0其初始状态y x (–1)= y(–1)= 0, y x (–2) = y(–2) = 1/2首先递推求出初始值y x (0), y x (1),y x (k)= –3y x (k –1) –2y x (k –2)y x (0)= –3y x (–1) –2y x (–2)= –1 , y x (1)= –3y x (0) –2y x (–1)=3方程的特征根为λ1= –1 ,λ2= –2 ,其解为y x (k)=C x1(–1)k +C x2(–2)k将初始值代入并解得C x1=1 , C x2= –2所以y x (k)=(–1)k –2(–2)k , k ≥0y f (k) + 3y f (k –1) + 2y f (k –2) = f(k) 初始状态:y f (–1)= y f (–2) = 0递推求初始值y f (0), y f (1),y f (k) = –3y f (k –1) –2y f (k –2) + 2k , k ≥0y f (0) = –3y f (–1) –2y f (–2) + 1 = 1y f (1) = –3y f (0) –2y f (–1) + 2 = –1分别求出齐次解和特解,得y f (k) = C f1(–1)k + C f2(–2)k + y p (k)= C f1(–1)k + C f2(–2)k + (1/3)2k 代入初始值求得C f1= –1/3 , C f2=1 所以y f (k)= –(–1)k /3+ (–2)k + (1/3)2k , k ≥0(2)零状态响应y f (k) 满足y(k)= yx (k) + yf(k)=(–1)k–2(–2)k –(–1)k/3+ (–2)k + (1/3)2k = 2/3 (–1)k -(–2)k + (1/3)2k, k≥0(3)全状态响应y(k)四、本节小结差分方程的求解零输入响应、零状态响应。