位置度公差值
- 格式:xls
- 大小:17.00 KB
- 文档页数:1
位置度公差等级标准可以根据不同的应用场景和需求进行选择。
在我国的标准体系中,位置度公差等级的标准是GB/T ,其中规定了不同公差等级的位置度公差值。
一般来说,位置度公差等级可以分为21个等级,从IT0到IT18。
其中,IT0级是最高的精度等级,适用于要求非常高的精密机械零件。
IT18级是最低的精度等级,适用于一般机械零件的制造。
在实际应用中,选择适当的公差等级需要根据具体零件的功能要求、制造工艺、测量手段和经济性等因素进行综合考虑。
在某些情况下,也可以根据实际情况进行非标准公差等级的设置。
需要注意的是,位置度公差等级的标准可能会随着时间和技术的进步而发生变化,因此在实际应用中应结合具体情况进行选用。
位置度位置度定义﹕一形体的轴线或中心平面允许自身位置变动的范围﹐即一形体的轴线或中心平面的实际位置相对理论位置的允许变动范围。
定义轴线或中心曲面的意义在于避开形体尺寸的影响。
位置度的三要素:1.基准﹔2.理论位置值﹔3.位置度公差位置度公差带:位置度公差带是一以理论位置为中心对称的区域位置度是限制被测要素的实际位置对理想位置变动量的指标。
它的定位尺寸为理论正确尺寸。
位置度公差在评定实际要素位置的正确性, 是依据图样上给定的理想位置。
位置度包括点的位置度、线的位置度和面的位置度。
[1]点的位置度:如公差带前加S¢,公差带是直径为公差值t的球内的区域,球公差带的中心点的位置由理论正确尺寸确定。
线的位置度:如公差带前加¢,公差带是直径为公差值t的圆柱面内的区域,公差带的轴线的位置由理论正确尺寸确定。
一般来说我们算位置度都是X.Y两个值的偏差量去换算以基准A、B、C建立坐标系,看具体的位置关系选择使用直角或极坐标,一般采用直角坐标,测出被测点到基准的X、Y尺寸,采用公式2乘以SQRT(平方根)((x2-x1)平方+(y2-y1)平方)就行,x2是实际尺寸,x1是图纸设计尺寸,计算出的结果就是:实际位置相对于设计的理想位置的偏移量,因为位置度是一个偏移范围¢,所以要乘以2这个常见的公式直线度(-)——是限制实际直线对理想直线直与不直的一项指标。
平面度——符号为一平行四边形,是限制实际平面对理想平面变动量的一项指标。
它是针对平面发生不平而提出的要求。
圆度(○)——是限制实际圆对理想圆变动量的一项指标。
它是对具有圆柱面(包括圆锥面、球面)的零件,在一正截面(与轴线垂直的面)内的圆形轮廓要求。
圆柱度(/○/)——是限制实际圆柱面对理想圆柱面变动量的一项指标。


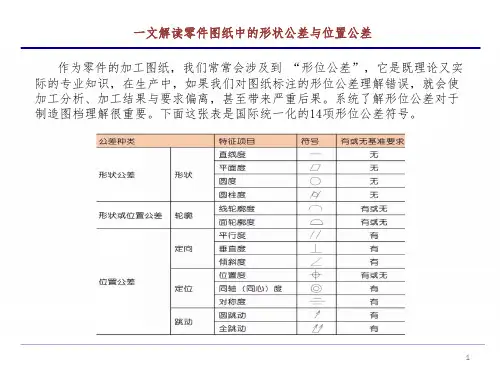
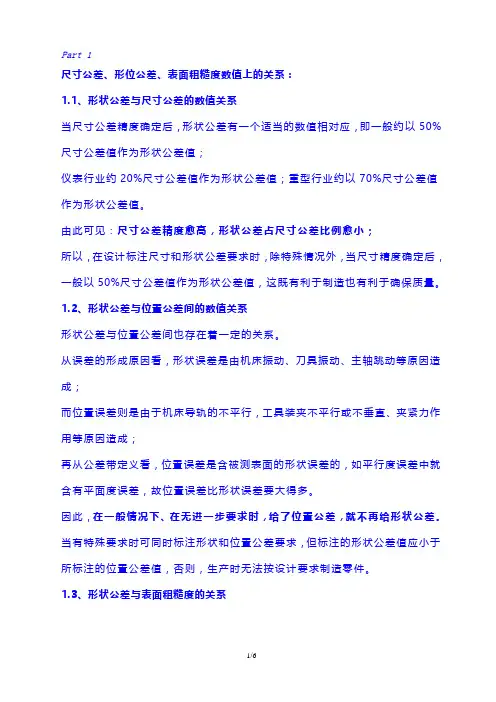
Part 1尺寸公差、形位公差、表面粗糙度数值上的关系:1.1、形状公差与尺寸公差的数值关系当尺寸公差精度确定后,形状公差有一个适当的数值相对应,即一般约以50%尺寸公差值作为形状公差值;仪表行业约20%尺寸公差值作为形状公差值;重型行业约以70%尺寸公差值作为形状公差值。
由此可见:尺寸公差精度愈高,形状公差占尺寸公差比例愈小;所以,在设计标注尺寸和形状公差要求时,除特殊情况外,当尺寸精度确定后,一般以50%尺寸公差值作为形状公差值,这既有利于制造也有利于确保质量。
1.2、形状公差与位置公差间的数值关系形状公差与位置公差间也存在着一定的关系。
从误差的形成原因看,形状误差是由机床振动、刀具振动、主轴跳动等原因造成;而位置误差则是由于机床导轨的不平行,工具装夹不平行或不垂直、夹紧力作用等原因造成;再从公差带定义看,位置误差是含被测表面的形状误差的,如平行度误差中就含有平面度误差,故位置误差比形状误差要大得多。
因此,在一般情况下、在无进一步要求时,给了位置公差,就不再给形状公差。
当有特殊要求时可同时标注形状和位置公差要求,但标注的形状公差值应小于所标注的位置公差值,否则,生产时无法按设计要求制造零件。
1.3、形状公差与表面粗糙度的关系形状误差与表面粗糙度之间在数值和测量上尽管没有直接联系,但在一定的加工条件下两者也存在着一定的比例关系。
据实验研究,在一般精度时,表面粗糙度占形状公差的1/5~1/4。
由此可知,为确保形状公差,应适当限制相应的表面粗糙度高度参数的最大允许值。
在一般情况下,尺寸公差、形状公差、位置公差、表面粗糙度之间的公差值具有下述关系式:尺寸公差>位置公差>形状公差>表面粗糙度高度参数。
从尺寸、形位与表面粗糙度的数值关系式不难看出,设计时要协调处理好三者的数值关系。
在图样上标注公差值时应遵循:给定同一表面的粗糙度数值应小于其形状公差值;而形状公差值应小于其位置公差值;位置各差值应小于其尺寸公差值。
位置度公差值的计算位置度公差值是在设计和制造过程中用来控制零件的尺寸和位置偏差的重要参数。
它是指在一定的尺寸范围内,允许零件偏离其设计位置的最大距离。
位置度公差值通常用于说明两个或多个特征之间的位置关系,如平行度、垂直度、同轴度等。
一、平行度和垂直度的计算方法平行度和垂直度是用来描述两个平面或曲面之间的平行或垂直关系的。
计算平行度和垂直度公差值的方法是测量两个平面或曲面之间的夹角,并与设计要求进行比较。
平行度和垂直度公差的计算公式如下:公差值=所测量的夹角-设计要求的夹角例如,如果设计要求两个平面之间的垂直度为90度,而测量结果为89度,那么公差值就是1度。
二、同轴度的计算方法同轴度是用来描述两个圆柱面或圆锥面之间的轴线位置关系的。
同轴度公差值的计算方法是测量两个圆柱面或圆锥面的轴线距离,并与设计要求进行比较。
同轴度公差的计算公式如下:公差值=所测量的轴线距离-设计要求的轴线距离例如,如果设计要求两个圆柱面的轴线距离为0.1毫米,而测量结果为0.2毫米,那么公差值就是0.1毫米。
三、位置公差的计算方法位置公差是用来描述一个特征中心位置允许的最大偏差的。
位置公差值的计算方法是测量特征中心的实际位置偏差,并与设计要求进行比较。
位置公差的计算公式如下:公差值=所测量的位置偏差-设计要求的位置偏差例如,如果设计要求一个特征中心的位置偏差不超过0.1毫米,而测量结果为0.05毫米,那么公差值就是0.05毫米。
总结:位置度公差值的计算方法根据不同的尺寸和位置要求有所不同。
平行度和垂直度的计算方法是将测量结果与设计要求的夹角进行比较,同轴度的计算方法是将测量结果与设计要求的轴线距离进行比较,位置公差的计算方法是将测量结果与设计要求的位置偏差进行比较。
这些计算方法能够帮助设计师和制造者确定是否满足了产品的设计要求,并进行必要的调整和改进。
位置度公差值的计算-形状和位置公差位置度公差GB 13319-1991本章给出适用于呈任何分布形式的内、外相配要素,为保证装配互换而给定位置度公差的公差值计算方法。
1 代号t--位置度公差值(公差带的直径或宽度)S--光孔与紧固件之间的间隙Dmin--光孔的最小直径dmax--螺栓、螺钉或销轴的最大直径K--间隙利用系数2 螺栓连接的计算方式2.1 用螺栓连接两个或两个以上的零件,且被连接零件均为光孔,其孔径大于螺栓直径,如图45。
计算公式: t=K*S ---------------------------(1)式中:S=Dmin -dmaxK的推荐值为:不需调整的连接:K=1;需要调整的连接:K=0.8或K=0.6。
注:K值的选择应根据连接件之间所需要的调整间隙量确定。
例如:某个采用螺栓连接的部位,其光孔与紧固件之间的间隙为1mm:a. 若设计只要求装配时螺栓能顺利地穿入被被连接件的光孔,各被连接件不需作相互错动的调整;此时,选K=1,则t=1mm。
若被连接件光孔的位置度误差达到最大值1mm,螺栓穿入后,被连接件之间无法相互错动调整。
b. 若设计要求在螺栓穿入被连接件的光孔后,为保证其他环节的调整需要,如边缘对齐等,各被连接件之间应能相互错动调整0.4mm,此时,选K=0.8,则t=0.8mm。
若被连接件光孔的位置度误差均达到最大值0.8mm,螺栓穿入后,两被连接件之间仍有0.4mm的相互错动调整量。
2.2 若考虑结构,加工等因素,被连接零件采用不相等的位置度公差ta 、tb时,则应满足:ta +tb≤2t。
若连接三个或更多个零件而采用不相等的位置度公差时,则任意两个零件的位置公差之和应满足:ta +tb≤2t。
3 螺钉(或螺柱)连接的计算公式3.1 被螺钉(或螺柱)连接的零件中,有一个零件的孔是螺孔(或过盈配合孔),而其它零件的孔均为光孔,且孔径大于螺钉直径,如图46。
计算公式: t=0.5K*s ------------------------(2)式中:S=Dmin -dmaxK的推荐值为:不需调整的连接:K=1;需要调整的连接:K=0.8或K=0.6。
位置度公差标准
位置度公差的标准通常分为两种类型:一种是在给定平面内点的位置度公差,其公差带是直径为公差值t的圆所限定的区域。
该圆公差带的中心点位置是由基准的理论正确尺寸所确定。
另一种是在空间上点的位置度公差,其公差带是直径为公差值t的球内的区域。
该球公差带中心点的位置,是由相对于基准的理论正确尺寸所确定。
此外,线的位置度公差被测要素为一直线(中心线),根据零件功能要求不同,线的位置度公差要求有以下几种形式:给定在一个方向上线的位置度公差,其公差带是以线的理想位置为中心对称配置的两平行直线所限定的区域。
该中心线的位置是由相对于基准的理论正确尺寸确定,公差带的宽度方向是框格指引线箭头所指的方向。
给定在相互垂直的两个方向上线的位置度公差,其公差带是两对相互垂直的,间距分别等于公差值t1和t2,且以线的理想位置为中心对称配置的两平行平面所限定的区域。
两公差值可以不相等或相等。
该线的理想位置是由相对于三基面体系的理论正确尺寸确定的。
位置度公差值数系的理解位置度公差值数系是指在工程设计和制造中,用于描述零件位置精度的一种数值系统。
位置度公差值数系是根据国际标准ISO 1101和国家标准GB/T 1804-2000制定的。
本文将从理解位置度公差值数系的概念入手,介绍其基本原理、应用范围和数值表示方法,并探讨其在工程设计和制造中的重要性和作用。
一、位置度公差值数系的概念位置度公差值数系是一种用于描述零件位置精度的数值系统。
在工程设计和制造中,零件的位置精度是指零件与其它零件之间的相对位置关系。
位置度公差值数系通过定义一组数值来表示零件的位置精度要求,以确保零件在装配和使用过程中能够满足设计要求。
二、位置度公差值数系的基本原理位置度公差值数系的基本原理是基于几何特征和公差要求的匹配关系。
几何特征是指零件的形状、大小和位置等几何性质,公差要求是指零件与其它零件之间的相对位置关系。
位置度公差值数系通过定义一组数值来描述几何特征与公差要求之间的匹配关系,以确保零件在装配和使用过程中能够满足设计要求。
三、位置度公差值数系的应用范围位置度公差值数系广泛应用于各个领域的工程设计和制造中,特别是在精密机械、汽车、航空航天、电子和仪器仪表等行业。
它可以用于描述各种零件的位置精度要求,例如轴、孔、平面、倾斜面、平行度、垂直度、同轴度等。
四、位置度公差值数系的数值表示方法位置度公差值数系使用一组数值来表示零件的位置精度要求。
其中,位置度公差表示零件与其它零件之间的相对位置关系,公差值表示位置度公差的大小。
位置度公差可以分为两种形式,一种是绝对位置度公差,另一种是相对位置度公差。
绝对位置度公差是指零件的位置要求与参考坐标系的位置要求之间的差值,相对位置度公差是指零件之间的相对位置要求。
五、位置度公差值数系在工程设计和制造中的重要性和作用位置度公差值数系在工程设计和制造中具有重要的作用。
首先,它可以确保零件在装配和使用过程中能够满足设计要求,提高产品的质量和可靠性。
位置度公差的概念
位置度公差(Positional tolerance)是在工程制图中用来描述零件的尺寸和位置等要求的一种公差标注方式。
它用于确定一个特定的几何元素(如点、线、面等)的理论位置与实际位置之间的偏差范围。
位置度公差包括两个部分:公差值和公差带。
公差值表示允许的实际位置与理论位置之间的最大偏差值,公差带表示公差值两侧的偏差范围,即实际位置可以在公差带内任意位置。
位置度公差常用于描述工件的几何要求,如平行度、垂直度、同轴度、对称度等。
例如,如果一个零件上标注了一个位置度公差为±0.1mm的平行度要求,表示这个零件上的平行线之间
的最大偏差不得超过0.1mm。
位置度公差的概念主要用于确保零件组装和功能的正确性,减少零件之间的相互影响和误差,提高产品的质量和性能。
在制造过程中,位置度公差常常与其他公差标注方式(如尺寸公差、形位公差等)结合使用,形成完整的公差控制系统,以确保工件的相互配合和组装符合设计要求。
位置度公差带是指标注了被测要素位置度的尺寸公差带。
位置度是确定被测实际要素与理想位置的接近程度的理想要素,它可是一种几何形状,如圆、圆柱、圆锥等,也可以是一种与基准要素的关系,如距离、方向、间隔等。
位置度公差带的特点是具有一定的位置,对其的精确度要求根据设计要求和实际情况来确定。
位置度公差带的形状可以为圆形、椭圆形、水平或垂直方向等,其大小和位置根据实际需要来确定。
在制造过程中,位置度公差带的位置精度要求较高,需要使用高精度的机床和测量工具来进行控制和保证。
位置度公差带的位置精度要求通常由设计人员根据实际需要来确定,需要考虑多种因素,如零件的功能要求、制造工艺、测量精度等。
在设计过程中,设计人员需要与制造、测量和质量控制部门密切合作,以确保位置度公差带的精度满足设计要求。
在制造过程中,位置度公差带的控制方法主要包括设计优化、工艺优化、测量控制等。
设计优化可以提高零件的结构和形状精度,从而降低位置度公差带的影响。
工艺优化可以通过选择合适的加工设备和刀具、调整工艺参数等方法来提高加工精度,从而控制位置度公差带的位置。
测量控制可以通过使用高精度的测量仪器和方法,以及建立可靠的测量控制系统,来确保零件的位置度公差带的精度满足设计要求。
值得注意的是,位置度公差带的位置精度要求较高,需要考虑多种因素和采用多种方法进行控制和保证。
如果制造过程中存在误差或缺陷,位置度公差带的精度可能会受到影响,从而影响产品的质量和性能。
因此,在制造过程中需要加强质量控制和管理,确保每个环节的精度和可靠性。
总之,位置度公差带是确定被测实际要素与理想位置的接近程度的重要指标,其大小和位置根据实际需要来确定。
位置度公差带的控制方法包括设计优化、工艺优化、测量控制等。
在制造过程中需要加强质量控制和管理,以确保位置度公差带的精度满足设计要求,从而保证产品的质量和性能。