位置度公差值的计算及其标注方法
- 格式:pdf
- 大小:88.46 KB
- 文档页数:5
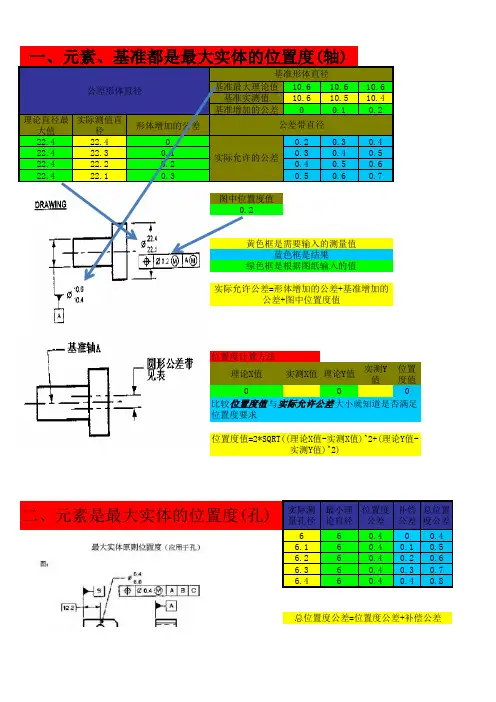
基准最大理论值10.610.610.6基准实测值10.610.510.4基准增加的公差00.10.2理论直径最大值实际测值直径形体增加的公差22.422.400.20.30.422.422.30.10.30.40.522.422.20.20.40.50.622.422.10.30.50.60.7图中位置度值0.2理论X值实测X值理论Y值实测Y 值位置度值000实际测量孔径最小理论直径位置度公差补偿公差总位置度公差660.400.46.160.40.10.56.260.40.20.66.360.40.30.76.460.40.40.8一、元素、基准都是最大实体的位置度(轴)基准形体直径公差形体直径公差带直径实际允许的公差位置度计算方法实际允许公差=形体增加的公差+基准增加的公差+图中位置度值位置度值=2*SQRT((理论X值-实测X值)^2+(理论Y值-实测Y值)^2)总位置度公差=位置度公差+补偿公差黄色框是需要输入的测量值蓝色框是结果绿色框是根据图纸输入的值比较位置度值与实际允许公差大小就知道是否满足位置度要求二、元素是最大实体的位置度(孔)位置度值=2*SQRT((理论X值-实测X 值)^2+(理论Y值-实测Y值)^2)位置度值=2*SQRT((理论X值-实测X 值)^2+(理论Y值-实测Y值)^2)总位置度公差=位置度公差+补偿公差基准最小理论值18.118.118.1基准实测值18.218.1518.1基准增加的公差0.10.05理论直径最小值实际测值直径形体增加的公差2525.050.050.350.30.252525.040.040.340.290.242525.020.020.320.270.2225250.30.250.2图中位置度值0.2理论X值实测X值理论Y值实测Y 值位置度值000位置度值=2*SQRT((理论X值-实测X值)^2+(理论Y值-实测Y值)^2)实际允许公差=形体增加的公差+基准增加的公差+图中位置度值位置度计算方法比较位置度值与实际允许公差大小就知道是否满足实际允许的公差公差带直径公差形体直径基准形体直径四、元素、基准都是最大实体的位置度(孔)孔类与轴类的最大最小实体增加的公差区别:轴:最大理论直径-测量直径孔:测量直径-最小理论直径。
![位置度公差带的定义、标注和解释_汽车机械基础_[共4页]](https://uimg.taocdn.com/c08f81b40b1c59eef9c7b47f.webp)
第6章 几何公差
113
续表
面对基准面的倾斜度公差
公差带为间距等于公差值t 两平行平面所限定的区域。
该两平行平面按给定角度倾斜于基准平面基准平面。
提取(实际)表面应限定在间距等于的两平行平面之间。
该两平行平面按理论正确角度40°倾斜于基准平面
6.2.4 位置度公差带的定义、标注和解释
位置公差是指被测提取要素对已具有确定位置的拟合要素的允许变动量,拟合要素由基准和理论正确尺寸(长度或角度)确定的。
当拟合要素和被测提取要素均为轴线时,为同轴度;当拟合要素和被测提取要素均为轴线,且足够短或为中心点时,为同心度;当拟合要素和被测提取要素为其他要素时,为对称度;其他情况均为位置度公差。
位置公差带的定义、标注和解释如表6-5所示。
表6-5 位置公差带的定义、标注和解释(摘自GB/T 1182—2008)
单位:mm
公差带的定义
标注和解释
点的位置度公差
公差值前加注S φ,公差带为直径等于公差值φt 的圆球面所限定的区域。
该圆球面中心的理论正确位置由基准A 、B 、C 和理论正确尺寸确定
提取(实际)球心应限定在直径等于S φ0.3的圆球面内。
该圆球面的中心由基准A 、B 、C 和理论正确尺寸30、25确定
注:提取(实际)球心的定义尚未标准化。
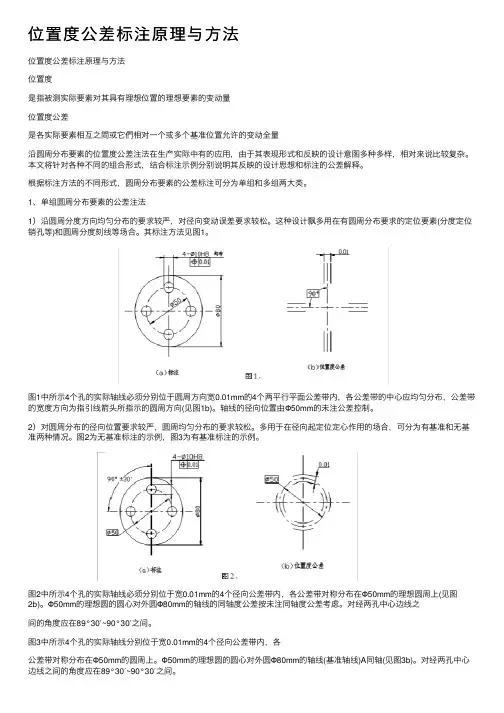
位置度公差标注原理与⽅法位置度公差标注原理与⽅法位置度是指被测实际要素对其具有理想位置的理想要素的变动量位置度公差是各实际要素相互之間或它們相对⼀个或多个基准位置允许的变动全量沿圆周分布要素的位置度公差注法在⽣产实际中有的应⽤,由于其表现形式和反映的设计意图多种多样,相对来说⽐较复杂。
本⽂将针对各种不同的组合形式,结合标注⽰例分别说明其反映的设计思想和标注的公差解释。
根据标注⽅法的不同形式,圆周分布要素的公差标注可分为单组和多组两⼤类。
1、单组圆周分布要素的公差注法1)沿圆周分度⽅向均匀分布的要求较严,对径向变动误差要求较松。
这种设计飘多⽤在有圆周分布要求的定位要素(分度定位销孔等)和圆周分度刻线等场合。
其标注⽅法见图1。
图1中所⽰4个孔的实际轴线必须分别位于圆周⽅向宽0.01mm的4个两平⾏平⾯公差带内,各公差带的中⼼应均匀分布,公差带的宽度⽅向为指引线箭头所指⽰的圆周⽅向(见图1b)。
轴线的径向位置由Φ50mm的未注公差控制。
2)对圆周分布的径向位置要求较严,圆周均匀分布的要求较松。
多⽤于在径向起定位定⼼作⽤的场合,可分为有基准和⽆基准两种情况。
图2为⽆基准标注的⽰例,图3为有基准标注的⽰例。
图2中所⽰4个孔的实际轴线必须分别位于宽0.01mm的4个径向公差带内,各公差带对称分布在Φ50mm的理想圆周上(见图2b)。
Φ50mm的理想圆的圆⼼对外圆Φ80mm的轴线的同轴度公差按未注同轴度公差考虑。
对经两孔中⼼边线之间的⾓度应在89°30′~90°30′之间。
图3中所⽰4个孔的实际轴线分别位于宽0.01mm的4个径向公差带内,各公差带对称分布在Φ50mm的圆周上。
Φ50mm的理想圆的圆⼼对外圆Φ80mm的轴线(基准轴线)A同轴(见图3b)。
对经两孔中⼼边线之间的⾓度应在89°30′~90°30′之间。
设计中是否选⽤有基准的标注,主要取决于给定位置度公差的成组要素是否对其它要素有定位(装配)关系。

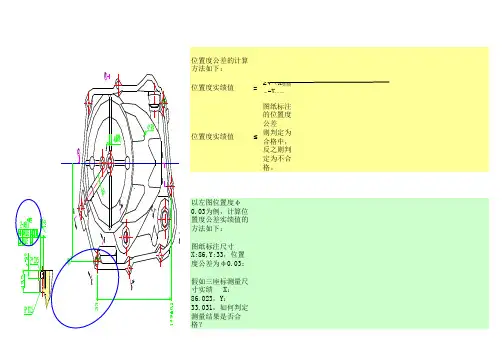
位置度公差及其计算
一、位置公差
位置公差定义为衡量尺寸特性的容许偏差,其可以测量相对于指定的
位置尺寸偏差值,是用来检查零件尺寸上的不规则度。
位置公差是应用着
重于零件尺寸的位置关系的公差,是衡量零件尺寸前后位置的公差标准,
其指定取决于每个零件的设计要求。
二、计算位置公差
1、首先,根据设计要求,确定位置公差要达到的要求,包括容许偏差、最大偏差等,然后制定位置公差的相关要求。
2、根据上述设计要求,对位置公差要求进行适当的标准化。
具体可
以分为公差、基本公差、保护层等等,这样就能够有效地加以控制位置公
差要求。
3、在上述标准化基础上,进行公差调整,调整过程可能涉及到精度、工艺参数等,以满足位置公差的要求。
4、最后对调整后的位置公差进行核查,可以采用先进的仪器仪表,
对精密零件来说,采用电子测量仪,以确保核查结果的准确性。
三、优点
(1)位置公差具有高效性:因为位置公差的标准化,可以减少不必
要的错误,大大提高工作效率,有助于提高生产的效率。
(2)更好的保证质量:位置公差的标准化,采用先进的仪器仪表,
可以更好的检查零件的精度,保证零件质量。

位置度公差计算公式
位置度公差是一种用于测量零件尺寸的公差,它可以用来衡量零件的尺寸精度。
它是一种精度公差,它可以用来衡量零件的尺寸精度,以及零件的尺寸是否符合要求。
位置度公差的计算公式是:位置度公差=(最大尺寸-最小尺寸)/2。
其中,最
大尺寸是指零件的最大尺寸,最小尺寸是指零件的最小尺寸。
位置度公差的计算结果可以用来衡量零件的尺寸精度。
如果位置度公差的计算
结果小于规定的公差,则表明零件的尺寸精度较高,可以满足要求。
如果位置度公差的计算结果大于规定的公差,则表明零件的尺寸精度较低,不能满足要求。
位置度公差的计算公式是一种简单而有效的方法,可以用来衡量零件的尺寸精度。
它可以帮助企业更好地控制零件的尺寸精度,从而提高产品的质量。
总之,位置度公差的计算公式是一种有效的方法,可以用来衡量零件的尺寸精度,从而提高产品的质量。
这是本人对于位置度公差的理解过程(或思维过程)的总结,如果大家觉得有价值就参考一下,如果大家觉得没意思,就一笑了之。
还是按习惯分成七步来讲,如果不小心又把大家给讲晕了,那是我的无心之错,敬请谅解。
举个例子也许能弥补一下表达能力的不足:Z-V!R#Xv: z7 O5 Y" _' l; O" v[attachment=25911] Ns'FH(:3 C/ Y) k1 H3 A3 MF?7u~b|@{) ?6 m2 Z% y* Q第一步:确定公差带的大小和形状。
公差带大小及形状是由公差框格中的公差值来确定的,公差值的大小就是公差带的大小,其形状则由公差值有无直径符号来确定,如果公差值前有直径符号,它的公差带就是一个直径等于公差值的圆柱;如果公差值前没有直径符号,它的公差带就应该是相距公差值的两平行平面。
从上面的例子中可以看出,6个φ8的孔的位置度公差带是直径为0.1的圆柱,而4个φ12的孔的位置度公差带是直径为0.2的圆柱。
t-_#Q bzE{ 3 l1 Y6 G! C; F9 w第二步:根据公差带的实体状态修正符号确定补偿公差。
公差带的实体状态由公差值后面的修正符号来确定。
如果没有任何修正符号,则表示位置度公差带在RFS状态,即公差带的大小与被测孔的实际尺寸无关;如果带MMC符号,则表示公差带适用于被测孔在MMC 时,当被测孔的实际尺寸从MMC向LMC偏离时,该偏离量将允许被补偿到位置度公差带上;如果带LMC符号,则表示公差带适用于被测孔在LMC时,当被测孔的实际尺寸从LMC向MMC偏离时,该偏离量将允许被补偿到位置度公差带上。
上图中两个位置度公差均是MMC 状态,因此它们的公差带的大小与被测孔的实际尺寸相关。
比如对φ8的孔来说,当它的实际尺寸在MMC时(φ8),它的位置度要求为φ0.1,当它的实际尺寸在LMC时(φ8.25),它的位置度公差带就变成了φ0.1+(φ8.25-φ8)=φ0.35。
螺栓、螺钉连接位置度公差计算
一、螺栓连接的计算公式
用螺栓连接丙个或两个以上的零件,且被连接零件均为光孔,其计算计算公式为:
T≤KZ
Z=D MIN-d MAX
T——位置度公差值
Z——孔与紧固件之间的间隙
D MIN——最小孔径
d MAX——螺栓或螺钉的最大直径
K——间隙利用系数
推荐值:不需调整的固定连接K=1
需调整的固定连接K=0.8或0.6
若考虑结构、加工等因素,被连接零件采用不相等的位置度公差T a 、T b时,则必须满足:T a+T b≤2T
二、螺钉连接的计算公式
被螺钉连接的零件中有一个是螺孔(或其它不带间隙的过盈配合孔).而其它均为光孔,其计算公式为:
T≤0.5KZ
Z=D MIN-d MAX
若考虑结构、加工等因素,被连接零件采用不相等的位置度公差T a 、T b时,螺孔(或过盈配合孔)与任一零件的位置度公差的组合必须满足:
T a+T b≤2T
注:圆整后取标准公差值
摘自机械工业出版社《机械工业最新基础标准应用手册》1988年出版。
位置度公差值的计算位置度公差值是在设计和制造过程中用来控制零件的尺寸和位置偏差的重要参数。
它是指在一定的尺寸范围内,允许零件偏离其设计位置的最大距离。
位置度公差值通常用于说明两个或多个特征之间的位置关系,如平行度、垂直度、同轴度等。
一、平行度和垂直度的计算方法平行度和垂直度是用来描述两个平面或曲面之间的平行或垂直关系的。
计算平行度和垂直度公差值的方法是测量两个平面或曲面之间的夹角,并与设计要求进行比较。
平行度和垂直度公差的计算公式如下:公差值=所测量的夹角-设计要求的夹角例如,如果设计要求两个平面之间的垂直度为90度,而测量结果为89度,那么公差值就是1度。
二、同轴度的计算方法同轴度是用来描述两个圆柱面或圆锥面之间的轴线位置关系的。
同轴度公差值的计算方法是测量两个圆柱面或圆锥面的轴线距离,并与设计要求进行比较。
同轴度公差的计算公式如下:公差值=所测量的轴线距离-设计要求的轴线距离例如,如果设计要求两个圆柱面的轴线距离为0.1毫米,而测量结果为0.2毫米,那么公差值就是0.1毫米。
三、位置公差的计算方法位置公差是用来描述一个特征中心位置允许的最大偏差的。
位置公差值的计算方法是测量特征中心的实际位置偏差,并与设计要求进行比较。
位置公差的计算公式如下:公差值=所测量的位置偏差-设计要求的位置偏差例如,如果设计要求一个特征中心的位置偏差不超过0.1毫米,而测量结果为0.05毫米,那么公差值就是0.05毫米。
总结:位置度公差值的计算方法根据不同的尺寸和位置要求有所不同。
平行度和垂直度的计算方法是将测量结果与设计要求的夹角进行比较,同轴度的计算方法是将测量结果与设计要求的轴线距离进行比较,位置公差的计算方法是将测量结果与设计要求的位置偏差进行比较。
这些计算方法能够帮助设计师和制造者确定是否满足了产品的设计要求,并进行必要的调整和改进。
位置度公差值的计算-形状和位置公差位置度公差GB 13319-1991本章给出适用于呈任何分布形式的内、外相配要素,为保证装配互换而给定位置度公差的公差值计算方法。
1 代号t--位置度公差值(公差带的直径或宽度)S--光孔与紧固件之间的间隙Dmin--光孔的最小直径dmax--螺栓、螺钉或销轴的最大直径K--间隙利用系数2 螺栓连接的计算方式2.1 用螺栓连接两个或两个以上的零件,且被连接零件均为光孔,其孔径大于螺栓直径,如图45。
计算公式: t=K*S ---------------------------(1)式中:S=Dmin -dmaxK的推荐值为:不需调整的连接:K=1;需要调整的连接:K=0.8或K=0.6。
注:K值的选择应根据连接件之间所需要的调整间隙量确定。
例如:某个采用螺栓连接的部位,其光孔与紧固件之间的间隙为1mm:a. 若设计只要求装配时螺栓能顺利地穿入被被连接件的光孔,各被连接件不需作相互错动的调整;此时,选K=1,则t=1mm。
若被连接件光孔的位置度误差达到最大值1mm,螺栓穿入后,被连接件之间无法相互错动调整。
b. 若设计要求在螺栓穿入被连接件的光孔后,为保证其他环节的调整需要,如边缘对齐等,各被连接件之间应能相互错动调整0.4mm,此时,选K=0.8,则t=0.8mm。
若被连接件光孔的位置度误差均达到最大值0.8mm,螺栓穿入后,两被连接件之间仍有0.4mm的相互错动调整量。
2.2 若考虑结构,加工等因素,被连接零件采用不相等的位置度公差ta 、tb时,则应满足:ta +tb≤2t。
若连接三个或更多个零件而采用不相等的位置度公差时,则任意两个零件的位置公差之和应满足:ta +tb≤2t。
3 螺钉(或螺柱)连接的计算公式3.1 被螺钉(或螺柱)连接的零件中,有一个零件的孔是螺孔(或过盈配合孔),而其它零件的孔均为光孔,且孔径大于螺钉直径,如图46。
计算公式: t=0.5K*s ------------------------(2)式中:S=Dmin -dmaxK的推荐值为:不需调整的连接:K=1;需要调整的连接:K=0.8或K=0.6。