离散状态空间分析
- 格式:ppt
- 大小:326.50 KB
- 文档页数:38

状态空间的名词解释状态空间是指描述系统或物体各种可能状态的一个抽象概念。
它在各个领域中都有着重要的应用,包括数学、物理学、计算机科学等。
在这篇文章中,我们将探讨状态空间的概念、性质和应用,并尝试借助一些具体的例子来说明。
首先,让我们来解释一下状态空间的基本定义。
状态空间通常可以被看作是一个多维空间,其中每个维度代表一个状态变量,而每个点则表示一个具体的状态。
例如,对于一个简单的二维状态空间,其中的一个维度可以表示对象的位置,而另一个维度则可以表示对象的速度。
在这个状态空间中,每个点都可以唯一地确定对象的位置和速度。
状态空间的一个重要性质是维数,即它包含的状态变量的个数。
维数的多少直接决定了状态空间的复杂程度。
一个低维的状态空间可能只包含很少的状态变量,而高维的状态空间则可能包含众多的状态变量。
这决定了系统在状态空间中的行为和演化方式。
例如,在物理学中,一个简谐振子的状态空间只有一维,因为只需要考虑物体的位置;而一个复杂的天气预测系统的状态空间可能包含数十个甚至数百个维度,因为需要考虑众多的气象参数。
状态空间的另一个重要概念是状态转移。
状态转移指的是系统在不同状态之间的切换过程。
在状态空间中,状态转移通常由一些规则或方程来描述。
这些规则可以是离散的,例如一个棋盘游戏中的走子规则,也可以是连续的,例如牛顿力学中的运动方程。
通过这些规则,我们可以预测系统在状态空间中的演化和变化。
状态转移的过程也可以被称为系统的动力学,它描述了系统状态的发展轨迹。
除了描述系统的状态和演化,状态空间还可以用于解决一些实际问题。
一个典型的例子是路径规划问题。
在这种问题中,我们需要找到一条从起点到终点的最短路径。
可以将路径规划问题转化为在状态空间中寻找一个状态转移序列的问题。
通过定义合适的状态转移规则和评估函数,我们可以通过在状态空间中搜索来解决这个问题。
类似地,状态空间可以用于机器学习中的强化学习问题、物理系统的建模和仿真等。
离散控制器的设计与实现离散控制器是一种广泛应用于工业自动化领域的控制系统。
它使用离散的时间和状态空间进行控制,具有精确性高、稳定性强等优点。
本文将介绍离散控制器的设计原理和实现方法。
一、离散控制器的设计原理离散控制器的设计基于离散时间线性系统的数学模型,主要包括离散传递函数和离散状态空间模型。
离散传递函数描述了输入与输出之间的关系,离散状态空间模型则描述了系统的状态变化。
1. 离散传递函数离散传递函数的一般形式为:G(z) = (b0 + b1z^(-1) + b2z^(-2) + ...)/(1 + a1z^(-1) + a2z^(-2) + ...)其中,b0, b1, b2...为输入项的系数,a1, a2...为输出项的系数。
通过确定这些系数,我们可以设计出符合控制要求的离散传递函数。
2. 离散状态空间模型离散状态空间模型的一般形式为:x(k+1) = Ax(k) + Bu(k)y(k) = Cx(k) + Du(k)其中,x(k)为系统状态向量,u(k)为输入向量,y(k)为输出向量,A 为状态转移矩阵,B为输入转移矩阵,C为输出转移矩阵,D为直接转移矩阵。
通过确定这些矩阵,我们可以设计出满足系统要求的离散状态空间模型。
二、离散控制器的实现方法离散控制器的实现方法包括传统PID控制器和现代控制理论中的状态反馈控制器和最优控制器等。
1. 传统PID控制器PID控制器是一种经典的控制器,由比例项、积分项和微分项组成。
离散PID控制器的离散传递函数可以表示为:G(z) = Kp + Ki(1/z) + Kd(z-1)/z其中,Kp、Ki和Kd分别为比例、积分和微分增益。
通过调节这些增益,我们可以实现对系统的控制。
2. 状态反馈控制器状态反馈控制器通过测量系统状态反馈进行控制。
离散状态反馈控制器的表达式为:u(k) = -Kx(k)其中,K为状态反馈增益矩阵,通过选择合适的增益矩阵K,我们可以实现对系统状态的精确控制。
状态空间描述
状态空间可以简单地理解为描述系统所处状态的一种抽象概念,它把一个复杂的系统抽象成多个独立状态,并以这些状态的变化来描述系统的演化变化规律。
状态空间描述了系统之间状态的可能变化,从而表明了每个状态之间的连接情况。
1. 什么是状态空间
状态空间是描述系统所处状态的一种抽象概念,它能够将一个复杂的系统抽象成多个独立的状态,并以这些状态的变化来描述系统的演化变化情况。
2. 状态空间的概念
状态空间是一种用于描述系统状态变化的空间,它通过多个状态表达了一个系统的演化情况,并将一个复杂的系统变化的规律映射到状态变化的空间中。
因此,它是表达某个系统演化情况的一种理想方法。
3. 状态空间的总体结构
状态空间是有限的,它由一个特定的状态集合构成,包括一组状态及其间的连接关系,这些连接关系通过不同的操作表示出来。
因此,状态空间的总体结构可以概括为包含了状态和连接情况的一维空间。
4. 状态空间变化
状态空间随着操作的不断变化,其所描述的系统也会不断变化,这就
形成了一个动态的状态空间,这里面存在着状态之间的连接关系,这
些连接关系是由可调整转移概率和操作决定的。
5. 对应建模
状态空间模型将状态空间中的各状态映射到离散时间模型,从而对模
型问题进行建模,通过状态空间模型可以计算出每个状态的概率,从
而能够较为准确地表述系统的状态情况,以找出问题的解决途径。
6. 状态空间可视化
状态空间可以使用可视化图像,将各状态之间的连接关系图示出来,
常见的可视化表示方法有马尔科夫网络图像,状态树图像和拓扑图像,这些可视化图像能够清晰地展示出状态空间的总体结构,从而简化问
题的解决过程。
第一章 计算机控制系统概述1、计算机控制系统的概念是什么?计算机控制系统是以计算机技术、控制理论及自动化技术相结合并应用于工业生产过程的结果,是以自动控制理论为基础,以计算机为手段的控制系统。
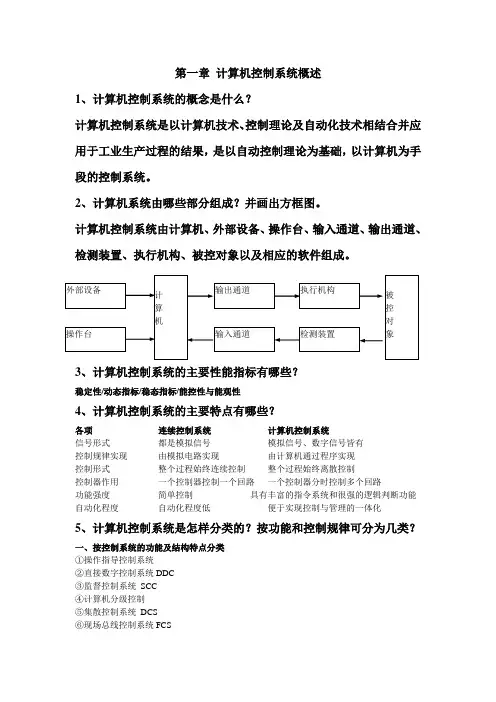
2、计算机系统由哪些部分组成?并画出方框图。
计算机控制系统由计算机、外部设备、操作台、输入通道、输出通道、检测装置、执行机构、被控对象以及相应的软件组成。
3、计算机控制系统的主要性能指标有哪些?稳定性/动态指标/稳态指标/能控性与能观性4、计算机控制系统的主要特点有哪些?各项 连续控制系统 计算机控制系统信号形式 都是模拟信号 模拟信号、数字信号皆有控制规律实现 由模拟电路实现 由计算机通过程序实现控制形式 整个过程始终连续控制 整个过程始终离散控制控制器作用 一个控制器控制一个回路 一个控制器分时控制多个回路功能强度 简单控制 具有丰富的指令系统和很强的逻辑判断功能 自动化程度 自动化程度低 便于实现控制与管理的一体化5、计算机控制系统是怎样分类的?按功能和控制规律可分为几类?一、按控制系统的功能及结构特点分类①操作指导控制系统②直接数字控制系统DDC③监督控制系统 SCC④计算机分级控制⑤集散控制系统 DCS⑥现场总线控制系统FCS外部设备操作台 输入通道 检测装置输出通道 执行机构 计 算 机 被 控 对 象二、按控制规律分类①程序和顺序控制② PID 控制③最少拍控制④复杂规律的控制⑤智能控制第二章 离散控制系统及Z 变换分析法1、计算机控制系统的信号形式有哪些?连续模拟信号:时间与幅值上均连续,如 r(t)、y(t)、u(t)离散模拟信号:时间是离散的,幅值上连续,如y*(t)、u*(t)离散数字信号:时间离散的,幅值为数字量,如y(kT)、u(kT)2、香农(Shannon)采样定理是如何描述的?一个连续时间信号f(t),设其频带宽度是有限的,其最高频率为ωmax(或fmax),如果在等间隔点上对该信号f(t)进行连续采样,为了使采样后的离散信号f *(t)能包含原信号f(t)的全部信息量。
零阶保持离散状态空间方程推导零阶保持离散状态空间方程推导一、引言在控制理论中,零阶保持离散状态空间方程是一种描述离散时间系统动态行为的数学模型。
它广泛应用于工程、电子、自动化等领域,具有重要的理论和实际价值。
本文将深入探讨零阶保持离散状态空间方程的推导和应用,帮助读者更深入地理解这一概念。
二、零阶保持离散状态空间方程的基本概念零阶保持离散状态空间方程是指系统的输出只与当前时刻的输入有关,与之前的输入和状态无关。
在离散时间系统中,可以用矩阵形式表示为:\[ x(k+1) = Ax(k) + Bu(k) \]\[ y(k) = Cx(k) + Du(k) \]其中,\( x(k) \) 是系统的状态向量,\( u(k) \) 是输入向量,\( y(k) \) 是输出向量,\( A \)、\( B \)、\( C \)、\( D \) 是系统的系数矩阵。
三、推导过程1. 零阶保持离散状态空间方程的推导过程涉及多种数学方法,包括矩阵运算、差分方程、离散时间系统等。
我们需要根据系统的动力学方程和输出方程建立状态方程和输出方程的关系。
2. 根据系统的状态转移方程,可以得到状态向量在下一时刻的表达式。
利用状态向量的递推关系,可以得到系统的状态方程。
3. 根据系统的输出表达式,可以得到系统的输出方程。
将状态方程和输出方程结合起来,就可以得到完整的零阶保持离散状态空间方程。
在推导过程中,我们需要注意考虑系统的各种状态和输入对方程的影响,以确保得到的状态方程和输出方程能够完整地描述系统的动态行为。
四、零阶保持离散状态空间方程的应用零阶保持离散状态空间方程在控制系统设计、信号处理、数字滤波、系统辨识等方面有着广泛的应用。
它不仅为系统分析和设计提供了重要的数学工具,而且在实际工程中具有重要的应用价值。
在数字控制系统中,我们可以利用零阶保持离散状态空间方程建立系统模型,进行系统仿真和控制算法设计,从而实现对系统动态行为的精确控制。
1 前言1.1 状态空间法的研究意义经典线性系统理论对于单输入-单输出线性定常系统的分析和综合是比较有效地,但其显著的缺点是只能揭示输入-输出间的外部特征,难以揭示系统内部的结构特性,也难以有效处理多输入-多输出系统。
在20世纪50年代蓬勃兴起的航天技术的推动下,1960年前后开始了从经典控制理论到现代控制理论的过渡,其中以个重要标志就是卡尔曼系统地将状态空间概念引入到控制理论中来。
现代控制理论正是在引入状态和状态空间概念的基础上发展起来的。
现代控制理论中的线性系统理论运用状态空间法描述输入-状态-输出诸变量间的因果关系,不但反映了系统的输入-输出外部特征,而且揭示了系统内部的结构特征,是一种既适用于单输入-单输出系统又适用于多输入-多输出系统,既可用于线性定常系统又可以用于线性时变系统的有效分析和综合方法。
在线性系统理论中,根据所采用的数学工具及系统描述方法,又出现了一些平行的分支,目前主要有线性系统的状态空间法、线性系统的几何理论、线性系统的代数理论、线性系统的多变量频域方法等。
由于状态空间法是线性系统理论中最重要和影响最广的分支,所以研究控制系统的状态空间分析及设计是非常有必要的。
1.2 状态空间法的国内外研究状况1940年到1950年,以频域方法为基础建立了古典控制理论,其特征是传递函数作为描述“受控对象”动态过程的数学模型,进行系统分析与综合;适用范围仅限于线性、定常(是不变)、确定性的、集中参数的单变量(单输入、单输出、简称SISO)系统;能解决的问题是以系统稳定性为核心的动态品质。
1950年代兴起的航天技术为代表的更加复杂的控制对象是一个多变量系统(多输入多输出、简称MIMO),有的控制对象具有非线性和时变特性,甚至具有不确定的、分布参数特性等。
在控制目标上,希望能解决在某种目标函数意义下的最优化问题。
1950年到1960年代不少科学家为此作出了杰出贡献,其中应特别提到的是庞特里亚金的“极值理论”,贝尔曼的“动态规划”,卡尔曼的“滤波”、“能控性和能观性”理论等。
简述问题的状态空间
问题的状态空间是指问题所涉及的所有可能状态的集合。
在计算机科学、人工智能和优化问题中,状态空间通常用于描述问题的不同解决方案或可能路径。
问题的状态空间可以是离散的或连续的,具体取决于问题的性质。
在人工智能中,搜索算法通常用于在状态空间中查找解决方案。
问题的状态空间的规模和复杂性会影响解决问题所需的计算资源和时间。
有效地定义问题的状态空间对于问题的建模和解决非常重要。