(整理)第四章曲面的第二基本形式与曲面上的曲率
- 格式:doc
- 大小:46.00 KB
- 文档页数:5


L = r uu · n = −r u · n u = √M = r u v · n = −r u · n v = −r v · n u = √ N = r vv · n = −r v · n v = √§2.3 曲面的第二基本形式2.3.1 第二基本形式前面我们引进出了曲面的第一基本形式 I , 研究了曲面的一些内蕴性质, 即只依赖于曲 面本身, 而不依赖于曲面在空间中如何弯曲的几何性质. 在理论和实际应用中, 必须考虑曲 面在空间中的弯曲程度, 为此, 我们将引进曲面的另一个二次微分式.对正则 C k (k ≥ 2) 曲面 S : r = r (u, v ) , 单位法向量 n =r u ×r v|r u ×r v |作为参数 u, v 的函数,其微分表示为 dn = n u du + n v dv . 由于 0 = d (n · n ) = 2n · dn , 所以 dn 是切平面中的向 量. 令 II = −dr · dn , 称 II 为曲面 S 的 第二基本形式. 下面我们首先计算第二基本形式的 参数表示. 由于 dr = r u du + r v dv , 所以II = −dr · dn= −(r u du + r v dv ) · (n u du + n v dv )= Ldu 2 + 2Mdu dv + Ndv 2,其中 L = −r u · n u , M = −(r u · n v + r v · n u )/2, N = −r v · n v , 它们作为参数 u, v 的函 数, 称为曲面 S 的第二基本形式系数.由于 r u · n = 0, r v · n = 0, 两式分别关于 u, v 求偏导数, 我们有r uu · n + r u · n u = 0, r vu · n + r v · n u = 0,因此第二基本形式系数可以表示为r uv · n + r u · n v = 0, r vv · n + r v · n v = 0,(r uu , r u , r v ) EG − F 2, (r uv , r u , r v ) EG − F 2,(r vv , r u , r v )EG − F 2.另外, 因为 n · dr = 0 , 微分便得 d 2r · n = −dr · dn , 于是我们得到曲面的第二基本形式的 以下三种等价的表示II = Ldu 2 + 2Mdudv + Ndv 2= n · d 2r = −dr · dn.78+ g 2+ g 2f+ g 2f【例 1】 对平面, 因法向量 n 为常向量, 所以 II = −dn · dr ≡ 0.对中心径矢为 r 0, 半径为 a 的球面, 因其单位法矢量 n = a 1 (r − r 0) 或 n = a 1 (r 0 − r ), 于 是 II = −dn · dr = ± a 1 I .【例 2】 求旋转曲面 r (u, v ) = {f (v ) cos u, f (v ) sin u, g (v )} 的第二基本形式. 【解】 直接计算得到以下各量r uu = {−f cos u, −f sin u, 0}, r uv = {−f sin u, −f cos u, 0}, r vv = {f cos u, f sin u, g },n =f1 2{g cos u, g sin u, −f },因此L = r uu · n =−fg 2,M = r uv · n = 0, N = r vv · n =f g − f g 2.【例 3】 求曲面 z = f (x, y ) 的第二基本形式.【解】 我们知道: 曲面 z = f (x, y ) 可以写成向量形式r (u, v ) = {u, v, f (u, v )},直接计算得到以下各量r u = {1, 0, f u },r v = {0, 1, f v }, n =r u × r v |r u × r v |= 1 1 + f u 2 + f v 2{−f u , −f v , 1},r uu = {0, 0, f uu }, r uv = {0, 0, f uv }, r vv = {0, 0, f vv },因此L = n · r uu =M = n · r uv =N = n · r vv =f uu 1 + f u 2 + f v 2f uv 1 + f u 2 + f v 2f vv 1 + f u 2 + f v 2,,,79= [dr + d 2r + o (du 2 + dv 2)] · n= dr · n + d 2r · n + o (du 2 + dv 2)= II + o (du 2 + dv 2)曲面 z = f (x, y ) 的第二基本形式是II =1 1 + f u2 + f v 2[f uu du 2 + 2f uv dudv + f vv dv 2].2.3.2 第二基本形式的几何意义−−→对曲面 S : r = r (u, v ) 上的给定点 P (u, v ) 及其邻近点 Q (u + du, v + dv ) , 令 d = P Q · n ,−−→即位移向量 P Q 在点 P 处单位法向量 n 方向上的投影. |d| 即从 Q 点到 P 点切平面的垂直距 离, 而 d 的正负号依赖于 Q 点是位于 P 点切平面的一侧或另一侧, 换句话说, d 的正负号反 映曲面 S 在 P 点处的弯曲方向. 利用向量形式的 Tayloy 展开式及事实 n · r u = 0, n · r v = 0,有−−→ d = P Q · n = (r (u + du, v + dv ) − r (u, v )) · n 12 1212−−→由此可见, II 代表起点在 P 的位移向量 P Q 在法向量上投影的主要部分的二倍, 它描 述了 Q 点在法方向上相对于 P 的改变, 即描述了曲面在 P 0 点附近弯曲的状况.【例 4】容易验证平面 r (u, v ) = {u, v, 0} 与圆柱面 r (u, v ) = {cos u, sin u, v} 具有相同的第一基本形式 du 2 + dv 2, 但平面的第二基本形式 II ≡ 0 , 而圆柱面的第二基 本形式 II = −du 2, 这表明它们在空间中的形状完全不同(事实正是如此).与第一基本形式 I 不同, 曲面的第二基本形式II 作为 (du, dv ) 的二次型, 当 LN − M 2 > 0 时是正定或负定; 当 LN − M 2 < 0 时是不定的; 而当 LN − M 2 = 0 时是退化 的.下面定理表明, 第二基本形式在一点的值与这点邻近曲面形状的关系. 定理 3.1曲面上, 使第二基本形式正定或负定的点邻近, 曲面的形状是凸的(或凹的, 由法向选取决定); 在第二基本形式不定的点邻近, 曲面是马鞍型的.证明 设 P 0(u 0, v 0) 是曲面 S : r = r (u, v ) 上的任一取定点, 我们考察到 P 0 点切80平面的高度函数f(u, v) = (r(u, v)− r(u0, v0)) · n(u0, v0),由于f u = r u · n(u0, v0), f v = r v · n(u0, v0),所以f u(u0, v0) = f v(u0, v0) , 即(u0, v0) 是f的临界点. 在这一点, 高度函数f的二阶导数方阵(Hessian矩阵)为f uu f uv f vu f vv (u0, v0) =LMMN(u0, v0).因此, 当第二基本形式II在点(u0, v0) 正定或负定时, f(u0, v0) = 0 是最大值或最小值, 这说明曲面S的形状是凸或凹的(如图2(1)). 而当第二基本形式II在点(u0, v0) 既非正定也非负定时, f(u0, v0) = 0 既不是最大值也不是最小值, 因而曲面S在这点附近是马鞍型(如图2(2)).根据上述定理, 我们对曲面上的点进行如下分类:(1) 椭圆点—使LN − M 2 > 0 的点. 在椭圆点处, 第二基本形式沿任何方向都不变号, 而且曲面在椭圆点邻近总位于切平面的一侧(如图2(1)).(2) 双曲点—使LN − M 2 < 0 的点. 在双曲点的切平面上, 有通过该点的两条直线将切平面分成四部分, 第二基本形式在这四部分或为正, 或为负, 而沿这两条直线, 第二基本形式为零. 曲面在双曲点邻近位于切平面的两侧(如图2(2)).(3) 抛物点—使LN − M 2 = 0 , 且L2 + M 2 + N 2 = 0 的点. 在抛物点的切平面81du ¯ = ∂u ¯ du + ∂u ¯ dv, ¯ v v ¯ v ¯ ¯ ¯ v v ¯ ¯ v ¯ u v ¯上, 有通过该点的惟一一条直线, 沿这条直线, 第二基本形式为零; 而沿其它任何方向 第二基本形式都不变号(如图2(3)).(4) 平点 — 使 L = M = N = 0 的点.【例 5】对环面 r (θ, φ) = {(b + a sin φ) cos θ, (b + a sin φ) sin θ, a cos φ} , 其中a <b 是正常数, 参数 0 ≤ θ, φ ≤ 2π . 直接计算知L = r uu · n = (b + a sin φ) sin φ, M = r uv · n = 0, N = r vv · n = a,而且LN − M 2 = a (b + a sin φ) sin φ,注意到第二基本形式系数只依赖于参数 φ , 即沿参数曲线 φ = φ0 , 第二基本形式系数 为常数. 又因为 0 < a < b, a (b + a sin φ) > 0 , 所以 LN − M 2 与 sin φ 同号. 最后我们 得到环面上点的如下分类(如图3):(1) 参数 φ 满足 0 < φ < π 的点是椭圆点(对应环面的外侧点); (2) 参数 φ 满足 π < φ < 2π 的点是双曲点(对应环面的内侧点); (3) 参数 φ = 0 及 φ = π 的点是抛物点(对应环面的内外侧交界点).2.3.3 第二基本形式的性质 定理 3.2在容许相差一个正负号的意义下, 第二基本形式 II 与曲面 S 上正则参数 (u, v ) 的选取无关.证明 设 r = r (u, v ) 和 r = r (¯u, v ¯) 是曲面 S 的两个不同参数表示, 相应的单位法 向量分别为 n 和 n . 利用下面两组等式∂u ∂vd ¯ = ∂u du +∂v dv,及r u = r u ∂u + r ¯ ∂u , r v = r u ∂v + r ¯ ∂v ,82¯ ¯ ¯ ¯容易验证, dr = dr (或者直接利用一阶微分形式的不变性), 同理有 dn = ±dn (正负 号依赖于参数变换 (u, v ) → (¯u, v ¯) 是同向或反向参数变换). 因此dr · dn = ±dr · dn,即在同向参数变换下, 第二基本形式不变, 而在反向参数变换下, 第二基本形式改变 符号.定理 3.3 下改变符号.曲面的第二基本形式在 R 3 的刚性运动下不变; 而在 R 3 的反刚性运动证明 设 f : f (P ) = P · T + P 0 是 R 3 的任一刚性或反刚性变换, 曲面 S : r =r (u, v ) 在 f 下的像为 S ∗ : r ∗(u, v ) = f ◦ r (u, v ). 则r ∗u × r ∗v =(r u × r v ) · T , 当 det T = 1, −(r u × r v ) · T , 当 det T = −1,因此我们有 n ∗ = sgn(det T ). 又因为 dr ∗ = dr · T , 所以II ∗ = −dr ∗ · dn ∗ = −sgn(det T ) (dn · T ) · (dr · T ) = sgn(det T )II.注意到 det T = 1 或 −1 分别表示 f 是刚性运动或反刚性运动, 所以定理得证.83。
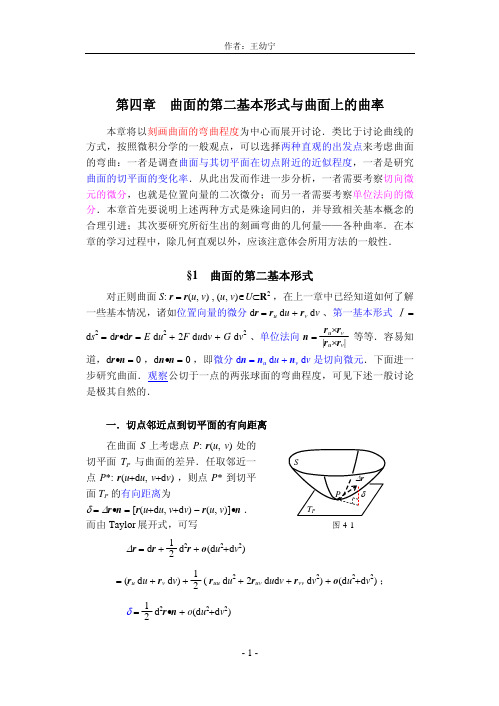
第四章 曲面的第二基本形式与曲面上的曲率本章将以刻画曲面的弯曲程度为中心而展开讨论.类比于讨论曲线的方式,按照微积分学的一般观点,可以选择两种直观的出发点来考虑曲面的弯曲:一者是调查曲面与其切平面在切点附近的近似程度,一者是研究曲面的切平面的变化率.从此出发而作进一步分析,一者需要考察切向微元的微分,也就是位置向量的二次微分;而另一者需要考察单位法向的微分.本章首先要说明上述两种方式是殊途同归的,并导致相关基本概念的合理引进;其次要研究所衍生出的刻画弯曲的几何量——各种曲率.在本章的学习过程中,除几何直观以外,应该注意体会所用方法的一般性.§1曲面的第二基本形式对正则曲面S: r=r(u, v) , (u, v)∈U⊂R2,在上一章中已经知道如何了解一些基本情况,诸如位置向量的微分 d r=r u d u+r v d v、第一基本形式Ⅰ=d s2= d r•d r=E d u2+ 2F d u d v+G d v2、单位法向n=r u×r v|r u×r v|等等.容易知道,d r•n= 0 ,d n•n= 0 ,即微分 d n=n u d u+n v d v是切向微元.下面进一步研究曲面.观察公切于一点的两张球面的弯曲程度,可见下述一般讨论是极其自然的.一.切点邻近点到切平面的有向距离在曲面S上考虑点P: r(u, v) 处的切平面T P与曲面的差异.任取邻近一点P*: r(u+d u, v+d v) ,则点P* 到切平面T P的有向距离为δ=Δr•n= [r(u+d u, v+d v) − r(u, v)]•n.而由Taylor展开式,可写图4-1Δr= d r+12 d2r+o(d u2+d v2)= (r u d u+r v d v) +12 ( r uu d u2+ 2ruvd u d v+r vv d v2) +o(d u2+d v2) ;δ=12 d2r•n+o(d u2+d v2)≈ 1 2 d 2r •n = 1 2 ( r uu •n d u 2 + 2r uv •n d u d v + r vv •n d v 2) .而 0 = d(d r •n ) = d 2r •n + d r •d n ,故又有δ = −1 2 d r •d n + o (d u 2+d v 2)≈ −1 2 d r •d n = −1 2 [r u •n u d u 2 + (r u •n v + r v •n u ) d u d v + r v •n v d v 2) ,其中 r u •n v = − r uv •n = − r vu •n = r v •n u .二.第二基本形式定义1 对正则曲面 S : r = r (u , v ) , (u , v )∈U ⊂R 2 ,称二次微分式(1.1) Ⅱ = −d r •d n = d 2r •n = L d u 2 + 2M d u d v + N d v 2为曲面 S 的第二基本形式,其系数 L , M , N 也称为曲面的第二基本量;称矩阵 ⎝⎛⎠⎞L M M N 为曲面 S 在参数 (u , v ) 下的第二基本形式系数矩阵,其行列式称为曲面 S 在参数 (u , v ) 下的第二基本形式系数行列式.第二基本形式的几何意义即为切点邻近点到切平面的有向距离的二倍.其计算较为直接;但同样也是关于曲面的最基本的计算,需要熟练掌握.按照定义以及前一段计算的结果,可列出下列算式:(1.2) L = L (u , v ) = −r u •n u = r uu •n= r uu • r u ×r v |r u ×r v | = (r uu , r u , r v ) |r u ×r v | = (r uu , r u , r v ) EG − F 2; (1.3) M = M (u , v ) = −r u •n v = −r v •n u = r uv •n = r vu •n= (r uv , r u , r v ) |r u ×r v | = (r uv , r u , r v ) EG − F 2; (1.4) N = N (u , v ) = −r v •n v = r vv •n = (r vv , r u , r v ) |r u ×r v | = (r vv , r u , r v ) EG − F 2; (1.5) Ⅱ = −d r •d n = −(d u , d v )⎝⎛⎠⎞r u r v ⎝⎛⎠⎞n u n v T ⎝⎛⎠⎞d u d v ,(1.6) ⎝⎛⎠⎞L M M N = − ⎝⎛⎠⎞r u r v ⎝⎛⎠⎞n u n v T = − ⎝⎛⎠⎞r u r v •(n u , n v ) . 下例展示了具体运算的两种基本途径.例1已知圆环面r(θ, ϕ) = ((b+a cosϕ ) cosθ , (b+a cosϕ ) sinθ , a sinϕ) ,其中两个常数a, b满足条件 0 <a<b.求其第二基本形式.解:直接计算可知rθ= (b+a cosϕ ) (−sinθ , cosθ , 0) ,图4-2 rϕ=a (−sinϕ cosθ , −sinϕ sinθ , cosϕ) ,rθ×rϕ=a(b+a cosϕ ) (cosϕ cosθ , cosϕ sinθ , sinϕ) ,|rθ×rϕ|=a(b+a cosϕ ) ,n=rθ×rϕ|rθ×rϕ|= (cosϕ cosθ , cosϕ sinθ , sinϕ) .途径①:rθθ= (b+a cosϕ ) (−cosθ , −sinθ , 0)=−(b+a cosϕ ) (cosθ , sinθ , 0) ,rϕθ=a (sinϕ sinθ , −sinϕ cosθ , 0) =a sinϕ (sinθ , − cosθ , 0) ,rϕϕ=a (−cosϕ cosθ , −cosϕ sinθ , −sinϕ) =−a n;L=rθθ•n=−(b+a cosϕ ) cosϕ,M=rϕθ•n= 0 ,N=rϕϕ•n=−a,从而第二基本形式为Ⅱ= d2r•n=L dθ 2+ 2M dθdϕ+N dϕ2=−(b+a cosϕ ) cosϕ dθ 2−a dϕ2.途径②:nθ= (−cosϕ sinθ , cosϕ cosθ , 0) = cosϕ (−sinθ , cosθ , 0) ,nϕ= (−sinϕ cosθ , −sinϕ sinθ , cosϕ) ,L=−rθ•nθ=−(b+a cosϕ ) cosϕ,M=−rϕ•nθ= 0 ,N=−rϕ•nϕ=−a,Ⅱ=−d r•d n=L dθ 2+ 2M dθdϕ+N dϕ2=−(b+a cosϕ ) cosϕ dθ 2−a dϕ2.三.在容许参数变换下的行为注意到 (1.5) 式,由一次微分形式的不变性易知,第二基本形式在保向容许参数变换下不变,在反向容许参数变换下变号;并且可证(留作习题)其在刚体运动下不变.下面考虑第二基本形式系数在容许参数变换下的变换规律.在容许参数变换 {u = u (u *, v *)v = v (u *, v *)下,分别记Jacobi 矩阵和Jacobi 行列式为 J = ⎝⎜⎛⎠⎟⎞∂u ∂u * ∂v ∂u *∂u ∂v * ∂v ∂v * ,∂(u , v ) ∂(u *, v *) = |J | ; 记参数 (u *, v *) 下曲面 S 的第二基本形式为Ⅱ = L *(u *, v *) d u *2 + 2M *(u *, v *) d u *d v * + N *(u *, v *) d v *2 .若参数变换为保向的,则由复合求导链式法则可得(1.7) ⎝⎛⎠⎞L * M *M * N * = − ⎝⎛⎠⎞r u * r v * ⎝⎛⎠⎞n u * n v *T= − J ⎝⎛⎠⎞r u r v ⎝⎛⎠⎞n u n vT J T = J ⎝⎛⎠⎞L M M N J T , (1.8) L *N * − M *2 = |J |2(LN − M 2) .若参数变换为反向的,则 (1.7) 式右端差一负号,而 (1.8) 式仍然成立.这说明,类似于第一基本形式系数矩阵,第二基本形式系数矩阵仍然服从所谓“张量”的变换规律;其系数行列式变换规律,也与第一基本形式的相仿.特别值得注意的事实是,成立(1.9) L *N * − M *2 E *G * − F *2 = LN − M 2EG − F 2. 此式说明,利用两个基本形式的系数可以构造出曲面的几何量.(1.9) 式所确定的几何量将在后续内容中进一步得到考察.习 题⒈ 证明曲面的第二基本形式在刚体运动下不变.⒉ 对正则曲面 S ,试证: S 是平面片的充要条件为其第二基本形式恒等于零.⒊ 讨论可展曲面的第二基本形式,并用以证明:曲面的第二基本形式不是内蕴量. ⒋ 计算下列曲面 r (u , v ) 的第二基本形式系数.① r (u , v ) = (u , u 2 − 2uv , u 3 − 3uv ) ;② r (u , v ) = (u + v , u − v , 2uv ) ;③ r (u , v ) = (u , v , f (u , v )) .⒌ 试证:正则球面片的第二基本形式是其第一基本形式的一个非零常数倍.⒍ 已知正则曲面 S : r (u , v ) 的第二基本形式是其第一基本形式的一个非零函数倍,即在参数 (u , v ) 下有 Ⅱ = f (u , v )Ⅰ ,f (u , v ) ≠ 0 .试证:① d n=−f d r; ② 函数f为常值函数;③ S为球面片.⒎设正则曲面S: r(u, v) 的两族坐标曲线都是直线,并且切平面沿v线重合.试证S是平面片.。

曲面高数知识点总结第一章曲面参数化1.1 曲面的定义在解析几何中,曲面是一个连续的二维流形;或者说,它是一个可以用二元实值函数的映射定义的连续函数。
这个映射把参数值的一个范围映射到一个参数的曲面上,比如(x, y)到f(x, y)。
参数的范围通常是一个矩形或者圆盘。
1.2 曲面参数化的意义曲面参数化是数学分析中常用的方法,通过参数化可以将曲面上的点表示为参数的函数,从而方便对曲面进行研究和分析。
曲面参数化的意义在于将曲面上的点与参数表示关联,使得曲面的性质和特征可以通过参数来描述和控制。
这为曲面的计算和应用提供了便利。
1.3 参数化公式一般来说,一个曲面的参数化可以写为:r(u, v) = x(u, v)i + y(u, v)j + z(u, v)k其中,r(u, v)是曲面上的点的位置矢量,(u, v)是参数,x(u, v),y(u, v),z(u, v)分别是参数u和v的函数,i,j,k 是空间直角坐标系向量的基底。
1.4 参数化曲面的例子以球面为例,球面可以通过参数化方程表示为:r(θ, φ) = (Rsinθcosφ)i + (Rsinθsinφ)j + (Rcosθ)k其中,(θ, φ)是球面上的点的参数,R是球面的半径。
通过参数化方程可以很容易地描述球面上的任意点的位置。
第二章曲面切线和法线2.1 曲面的切线曲面上的每一点都有一个切平面,这个切平面与曲面在该点相切。
切平面可以用曲面的切线方向向量来描述,这个向量正是切平面的法线向量。
在参数化曲面上,切线方向向量可以通过对参数u和v分别求偏导数来得到。
2.2 曲面的法线曲面上的法线是垂直于曲面的一个向量,可以用曲面的梯度来表示。
在参数化曲面上,法线可以通过对参数u和v求叉积得到。
2.3 曲面切线和法线的计算计算曲面上某一点的切线和法线可以通过计算曲面参数化方程对参数的偏导数,并利用偏导数的性质和几何关系来确定切线和法线的方向。
通过切线和法线可以描述曲面的局部性质和特征,对于曲面上的微分几何和曲面的应用有很大的作用。

第四章 曲面的第二基本形式与曲面上的曲率§4 Weingarten 变换Weingarten 公式刻画了曲面单位法向的运动状况,必然可以用以进一步了解曲面的弯曲状况.为了简化计算,也为了以后在更为抽象的几何对象上作类似的一般性讨论,本节将使用线性代数的语言讨论Weingarten 公式以及相关的线性变换.现改写Weingarten 公式为矩阵形式(4.1) d n = (d u 1, d u 2)⎝⎛⎠⎞n 1n 2 = −(d u 1, d u 2) ω ⎝⎛⎠⎞r 1r 2 = −(d u 1, d u 2) Ω g −1⎝⎛⎠⎞r 1r 2, 其中矩阵 ω 称为曲面在参数 (u 1, u 2) 下的Weingarten 矩阵.一.Weingarten 矩阵的性质⒈ 在参数变换下的行为在参数变换⎯u i =⎯u i (u 1, u 2) 下,记Jacobi 矩阵 J = ⎝⎛⎠⎞ ∂⎯u j∂u i 2×2 ,已知有 g = J ⎯g J T ,Ω = ± J ⎯Ω J T .故(4.2) ω = ± (J ⎯Ω J T )(J ⎯g J T )−1 = ± J ⎯ω J −1 .此式说明,Weingarten 矩阵在保向的不同参数下相似,从而其特征值在保向参数变换下不变,在反向参数变换下变号;其特征值方程(4.3) λ2 − tr.ω λ + |ω | = 0在保向参数变换下不变,从而其系数分别构成几何量(4.4) tr.ω = tr.(Ω g −1) =g 11Ω22 − 2g 12Ω12 + g 22Ω11 | g | = EN − 2FM + GL EG − F 2 , (4.5) |ω | = |Ω g −1| = |Ω | | g | = LN − M 2 EG − F 2. ⒉ 实特征值与特征向量定理1 正则曲面上的Weingarten 矩阵 ω 具有两个实特征值.证明 考虑曲面上的函数f = (tr.ω)2 − 4 |ω | = (ω11 + ω22)2 − 4 (ω11ω22 − ω12ω21)= (ω11 − ω22)2 + 4 ω12ω21 .由于它在参数变换下不变,故不妨设已经在正交参数网下考虑;此时,ω = Ω g −1 = ⎝⎛⎠⎞L M M N ⎝⎜⎛⎠⎟⎞1 E 00 1 G =⎝⎜⎛⎠⎟⎞L E M GME N G , f = ⎝⎛⎠⎞L E − N G 2 + 4M 2EG ≥ 0 . 故特征值方程 (4.3) 具有两个实根,即得结论. □注记 在正交网下,注意到Weingarten 矩阵 ω 的两个特征值相等时 M = 0从而 ω 对称,故由定理1结论进一步可知:在正则曲面上任何一点,矩阵 ω 可以实相似于实对角矩阵;特征值和特征向量都是实数.并且对两个实特征值 κ1 和 κ2 ,有 κ1 + κ2 = tr.ω , κ1κ2 = |ω | .定理2 在正则曲面上任何一点 P ,Weingarten 矩阵 ω 的两个特征值在点 P 相等的充要条件为 ω 是单位矩阵的倍数,即基本形式系数矩阵 Ω 与 g 在点 P 成比例.证明 充分性显然.下证必要性,并总在点 P 考虑.取矩阵 ω 的互相独立的两个特征向量 (a i 1, a i 2) , i = 1, 2 ,使 (a i 1, a i 2)ω = κi (a i 1, a i 2) ,则矩阵 A = (a i j )2×2 是非奇异方阵,且 A ω = κ1I 2 A = κ1 A .故此时有ω = A −1 (κ1 A ) = κ1I 2 ,Ω = ωg = κ1 g . □推论 在正则曲面上任何一点 P ,Weingarten 矩阵 ω 的两个特征值在点 P 相等的充要条件点 P 处的法曲率与切向无关. 二.Weingarten 变换 与Euler 公式在 E 3 的正则曲面 S 上,其每一点 P 的切平面 T P 都具有 E 3 的诱导内积而成为二维欧氏空间 E 2 .按Weingarten 公式 (4.1) 定义线性变换 (4.6) W : T P →T Pa = a i r i |P → W (a ) = a i W (r i |P ) ,其中定义W (r i |P ) = (ωi j r j )|P ,则称之为曲面 S 在点 P 处的切平面 T P 上的Weingarten 变换或Weingarten 映射.Weingarten 变换在切平面 T P 上的自然基 {r 1, r 2}|P 下的分量表示即为 (4.7) W : (1, 0) → (ω11, ω12) ,(0, 1) → (ω21, ω22) ,(a 1, a 2) → (a 1, a 2)ω = (a 1, a 2)Ωg −1 ;此即说明,Weingarten 变换在自然基 {r 1, r 2}|P 下以 ω|P 为表示矩阵.Weingarten 变换在切向微元上的作用为W (d r ) = W (d u i r i ) = (d u 1, d u 2)ω ⎝⎛⎠⎞r 1r 2 = −(d u 1, d u 2)⎝⎛⎠⎞n 1n 2= −d n ; Weingarten 公式 (4.1) 用Weingarten 变换反过来表达为(4.8) d n = −W (d r ) .此式说明,Weingarten 变换不依赖于自然基的选取,是由曲面本身所确定的切平面到自身的线性变换.曲面的第二基本形式和法曲率用Weingarten 变换分别表达为(4.9) Ⅱ = −d n •d r = W (d r )•d r ,(4.10) κn (P , d r ) = −d n •d r d r •d r = W (d r )•d r d r •d r = W ⎝⎛⎠⎞ d r |d r | • d r |d r |. Weingarten 变换 W 的特征值即为 ω 的实特征值 κ1 和 κ2 ; W 的特征向量 ξ = ξ i r i |P ∈T P −{0} 对应于矩阵 ω 的实特征向量 (ξ 1, ξ 2)∈R 2−{(0, 0)} .定理3 在正则曲面上任何一点 P ,Weingarten 变换 W 是 T P 上的自共轭线性变换,即:对 ∀a , b ∈T P ,成立 W (a )•b = a •W (b ) .证明 在自然基 {r 1, r 2}|P 下,记 a = a i r i |P , b = b i r i |P ,则W (a )•b = (a 1, a 2)ω ⎝⎛⎠⎞r 1r 2 ⎝⎛⎠⎞r 1r 2T ⎝⎛⎠⎞b 1b 2 = (a 1, a 2)ω g ⎝⎛⎠⎞b 1b 2 = (a 1, a 2)Ω ⎝⎛⎠⎞b 1b 2 = (b 1, b 2)Ω ⎝⎛⎠⎞a 1a 2 = W (b )•a = a •W (b ) . □推论1 对Weingarten 变换 W 的实特征值 κ1 和 κ2 ,存在对应的单位正交特征向量 ξi = ξi j r j ≠ 0 , i = 1, 2 ,即: W (ξi ) = κi ξi 且 ξi •ξ j = δij .证明 取定曲面上一点 P 考虑.在 T P 上,有以下两种情形:① κ1 = κ2 ,则 W 以 T P 上的任何一个非零向量为特征向量,故取单位正交向量 ξi = ξi j r j ≠ 0 , i = 1, 2 ,即为单位正交特征向量.② κ1 ≠ κ2 ,则可取单位特征向量 ξi = ξi j r i ≠ 0 , i = 1, 2 ,使W (ξi ) = κi ξi ,i = 1, 2 .此时,W (ξ1)•ξ2 = κ1ξ1•ξ2 , W (ξ2)•ξ1 = κ2ξ2•ξ1 ;故由自共轭性质可知两式相等,从而(κ1 − κ2)ξ1•ξ2 = 0 ,此即 ξ1•ξ2 = 0 ,即两特征向量正交.综合以上两种情形,得证. □推论2 给定Weingarten 变换 W 的实特征值 κ1 和 κ2 ,以及相应的单位正交特征向量 ξi = ξi j r j ≠ 0 , W (ξi ) = κi ξi 且 ξi •ξ j = δij ,i = 1, 2 .对于任何 a = |a | (ξ1cos θ + ξ2sin θ) ∈T P −{0} ,成立(4.11) κn (P , a ) = κ1|P cos 2θ + κ2|P sin 2θ ;(4.12) min{κ1|P , κ2|P } ≤ κn (P , a ) ≤ max{κ1|P , κ2|P } .证明 注意到 (4.10) 式以及特征向量的单位正交属性,由条件有κn (P , a ) = W ⎝⎛⎠⎞ a |a | • a |a |= [W (ξ1cos θ + ξ2sin θ)•(ξ1cos θ + ξ2sin θ)]|P= [κ1ξ1cos θ + κ2ξ2sin θ)•(ξ1cos θ + ξ2sin θ)]|P= κ1|P cos 2θ + κ2|P sin 2θ .此即结论 (4.11) 式;且由此易得 (4.12) 式. □(4.11) 式称为Euler 公式.若将上述切方向和法曲率都视为夹角 θ 的函数,则Euler 公式改写为常见的形式(4.13) κn (P , θ ) = κ1(P ) cos 2θ + κ2(P ) sin 2θ .从Euler 公式来看,曲面在一点附近的弯曲状况,主要依赖于两条法截线在该点的弯曲状况,这两条法截线的切向向量是Weingarten 变换的特征向量;这是Euler 截线法有效性的理论支持,同时也揭示出进一步考虑Weingarten 变换的特征值和特征方向的意义.以下两节将据此讨论.习 题⒈ 对于双曲抛物面 r = (u + v , u − v , uv ) ,试求:① Weingarten 矩阵 ω ;② Weingarten 变换 W 的特征值 κ1 和 κ2 ;③ 在点 (0, 0, 0) 处,Weingarten 变换的单位特征向量.⒉ 试证:在曲面上的任意一点之处,沿着两个正交的切方向的法曲率之和为常数. ⒊ 给定曲面上的一点,设此点处的Weingarten 变换 W 的两个特征值 κ1 ≠ κ2 .在该点处,沿着任意两个夹固定角 θ0 的切方向的法曲率之和为常数,试证:θ0 是直角.⒋在曲面的Weingarten变换W之下,若a, b∈T P−{0} 满足W(a)•b= 0 ,则称两个切向a和b是相互共轭的.试证:① W的单位正交特征向量ξ1和ξ2在切点是相互共轭的;② 自然切向量场r1和r2处处相互共轭的充要条件为Ω12≡ 0 ;③ 切向量场a=a i r i和自身处处相互共轭的充要条件为a i a jΩij≡ 0 .⒌ 回避线性变换语言,则采用下列所示步骤也可确定曲面在一点处的法曲率关于方向的最值情况.给定曲面在该点的两个基本形式系数矩阵g, Ω以及Weingarten矩阵ω,作二元实函数f(λ1, λ2) =λiΩijλjλi g ijλj , (λ1, λ2) ≠ (0, 0) .试证:① f(μλ1, μλ2) = f(λ1, λ2) , ∀μ∈R−{0} ;② f一定存在最大值和最小值;③ f的最值是ω的两个特征值κ1和κ2,f的最值点是ω的两个特征方向向量;④ f取常值的充要条件是ω以任何非零向量为特征向量;⑤ 当f不取常值时,最值κ1≠κ2.并且,此时f的相应最值点 (ξi1, ξi2) 满足ξ1i g ijξ2j= 0 , ξ1iΩijξ2j= 0 .。
第四章 曲面的第二基本形式与曲面上的曲率§4 Weingarten 变换Weingarten 公式刻画了曲面单位法向的运动状况,必然可以用以进一步了解曲面的弯曲状况.为了简化计算,也为了以后在更为抽象的几何对象上作类似的一般性讨论,本节将使用线性代数的语言讨论Weingarten 公式以及相关的线性变换.现改写Weingarten 公式为矩阵形式(4.1) d n = (d u 1, d u 2)⎝⎛⎭⎫n 1n 2 = -(d u 1, d u 2) ω ⎝⎛⎭⎫r 1r 2 = -(d u 1, d u 2) Ω g -1⎝⎛⎭⎫r 1r 2, 其中矩阵 ω 称为曲面在参数 (u 1, u 2) 下的Weingarten 矩阵.一.Weingarten 矩阵的性质⒈ 在参数变换下的行为在参数变换⎺u i =⎺u i (u 1, u 2) 下,记Jacobi 矩阵 J = ⎝⎛⎭⎫ ∂⎺u j∂u i 2⨯2 ,已知有 g = J ⎺g J T ,Ω = ± J ⎺Ω J T .故(4.2) ω = ± (J ⎺Ω J T )(J ⎺g J T )-1 = ± J ⎺ω J -1 .此式说明,Weingarten 矩阵在保向的不同参数下相似,从而其特征值在保向参数变换下不变,在反向参数变换下变号;其特征值方程(4.3) λ2 - tr.ω λ + |ω | = 0在保向参数变换下不变,从而其系数分别构成几何量(4.4) tr.ω = tr.(Ω g -1) = g 11Ω22 - 2g 12Ω12 + g 22Ω11 | g | = EN - 2FM + GL EG - F 2, (4.5) |ω | = |Ω g -1| = |Ω | | g | = LN - M 2 EG - F 2. ⒉ 实特征值与特征向量定理1 正则曲面上的Weingarten 矩阵 ω 具有两个实特征值.证明 考虑曲面上的函数f = (tr.ω)2 - 4 |ω | = (ω11 + ω22)2 - 4 (ω11ω22 - ω12ω21)= (ω11 - ω22)2 + 4 ω12ω21 .由于它在参数变换下不变,故不妨设已经在正交参数网下考虑;此时,ω = Ω g -1 = ⎝⎛⎭⎫L M M N ⎝ ⎛⎭⎪⎫1 E 00 1 G = ⎝ ⎛⎭⎪⎫L E M G M E N G , f = ⎝⎛⎭⎫L E - N G 2 + 4M 2EG ≥ 0 .故特征值方程 (4.3) 具有两个实根,即得结论. □注记 在正交网下,注意到Weingarten 矩阵 ω 的两个特征值相等时 M = 0从而 ω 对称,故由定理1结论进一步可知:在正则曲面上任何一点,矩阵 ω 可以实相似于实对角矩阵;特征值和特征向量都是实数.并且对两个实特征值 κ1 和 κ2 ,有 κ1 + κ2 = tr.ω , κ1κ2 = |ω | .定理2 在正则曲面上任何一点 P ,Weingarten 矩阵 ω 的两个特征值在点 P 相等的充要条件为 ω 是单位矩阵的倍数,即基本形式系数矩阵 Ω 与 g 在点 P 成比例.证明 充分性显然.下证必要性,并总在点 P 考虑.取矩阵 ω 的互相独立的两个特征向量 (a i 1, a i 2) , i = 1, 2 ,使 (a i 1, a i 2)ω = κi (a i 1, a i 2) ,则矩阵 A = (a i j )2⨯2 是非奇异方阵,且 A ω = κ1I 2 A = κ1 A .故此时有ω = A -1 (κ1 A ) = κ1I 2 ,Ω = ωg = κ1 g . □推论 在正则曲面上任何一点 P ,Weingarten 矩阵 ω 的两个特征值在点 P 相等的充要条件点 P 处的法曲率与切向无关. 二.Weingarten 变换 与Euler 公式在 E 3 的正则曲面 S 上,其每一点 P 的切平面 T P 都具有 E 3 的诱导内积而成为二维欧氏空间 E 2 .按Weingarten 公式 (4.1) 定义线性变换 (4.6) W : T P →T Pa = a i r i |P → W (a ) = a i W (r i |P ) ,其中定义W (r i |P ) = (ωi j r j )|P ,则称之为曲面 S 在点 P 处的切平面 T P 上的Weingarten 变换或Weingarten 映射.Weingarten 变换在切平面 T P 上的自然基 {r 1, r 2}|P 下的分量表示即为 (4.7) W : (1, 0) → (ω11, ω12) ,(0, 1) → (ω21, ω22) ,(a 1, a 2) → (a 1, a 2)ω = (a 1, a 2)Ωg -1 ;此即说明,Weingarten 变换在自然基 {r 1, r 2}|P 下以 ω|P 为表示矩阵.Weingarten 变换在切向微元上的作用为W (d r ) = W (d u i r i ) = (d u 1, d u 2)ω ⎝⎛⎭⎫r 1r 2 = -(d u 1, d u 2)⎝⎛⎭⎫n 1n 2= -d n ; Weingarten 公式 (4.1) 用Weingarten 变换反过来表达为(4.8) d n = -W (d r ) .此式说明,Weingarten 变换不依赖于自然基的选取,是由曲面本身所确定的切平面到自身的线性变换.曲面的第二基本形式和法曲率用Weingarten 变换分别表达为(4.9) Ⅱ = -d n •d r = W (d r )•d r ,(4.10) κn (P , d r ) = -d n •d r d r •d r = W (d r )•d r d r •d r = W ⎝⎛⎭⎫ d r |d r | • d r |d r |. Weingarten 变换 W 的特征值即为 ω 的实特征值 κ1 和 κ2 ; W 的特征向量 ξ = ξ i r i |P ∈T P -{0} 对应于矩阵 ω 的实特征向量 (ξ 1, ξ 2)∈R 2-{(0, 0)} .定理3 在正则曲面上任何一点 P ,Weingarten 变换 W 是 T P 上的自共轭线性变换,即:对 ∀a , b ∈T P ,成立 W (a )•b = a •W (b ) .证明 在自然基 {r 1, r 2}|P 下,记 a = a i r i |P , b = b i r i |P ,则W (a )•b = (a 1, a 2)ω ⎝⎛⎭⎫r 1r 2 ⎝⎛⎭⎫r 1r 2T ⎝⎛⎭⎫b 1b 2= (a 1, a 2)ω g ⎝⎛⎭⎫b 1b 2 = (a 1, a 2)Ω ⎝⎛⎭⎫b 1b 2 = (b 1, b 2)Ω ⎝⎛⎭⎫a1a 2 = W (b )•a = a •W (b ) . □推论1 对Weingarten 变换 W 的实特征值 κ1 和 κ2 ,存在对应的单位正交特征向量 ξi = ξi j r j ≠ 0 , i = 1, 2 ,即: W (ξi ) = κi ξi 且 ξi •ξ j = δij .证明 取定曲面上一点 P 考虑.在 T P 上,有以下两种情形:① κ1 = κ2 ,则 W 以 T P 上的任何一个非零向量为特征向量,故取单位正交向量 ξi = ξi j r j ≠ 0 , i = 1, 2 ,即为单位正交特征向量.② κ1 ≠ κ2 ,则可取单位特征向量 ξi = ξi j r i ≠ 0 , i = 1, 2 ,使W (ξi ) = κi ξi ,i = 1, 2 .此时,W (ξ1)•ξ2 = κ1ξ1•ξ2 , W (ξ2)•ξ1 = κ2ξ2•ξ1 ;故由自共轭性质可知两式相等,从而(κ1 - κ2)ξ1•ξ2 = 0 ,此即 ξ1•ξ2 = 0 ,即两特征向量正交.综合以上两种情形,得证. □推论2 给定Weingarten 变换 W 的实特征值 κ1 和 κ2 ,以及相应的单位正交特征向量 ξi = ξi j r j ≠ 0 , W (ξi ) = κi ξi 且 ξi •ξ j = δij ,i = 1, 2 .对于任何 a = |a | (ξ1cos θ + ξ2sin θ) ∈T P -{0} ,成立(4.11) κn (P , a ) = κ1|P cos 2θ + κ2|P sin 2θ ;(4.12) min{κ1|P , κ2|P } ≤ κn (P , a ) ≤ max{κ1|P , κ2|P } .证明 注意到 (4.10) 式以及特征向量的单位正交属性,由条件有κn (P , a ) = W ⎝⎛⎭⎫ a |a | • a |a |= [W (ξ1cos θ + ξ2sin θ)•(ξ1cos θ + ξ2sin θ)]|P= [κ1ξ1cos θ + κ2ξ2sin θ)•(ξ1cos θ + ξ2sin θ)]|P= κ1|P cos 2θ + κ2|P sin 2θ .此即结论 (4.11) 式;且由此易得 (4.12) 式. □(4.11) 式称为Euler 公式.若将上述切方向和法曲率都视为夹角 θ 的函数,则Euler 公式改写为常见的形式(4.13) κn (P , θ ) = κ1(P ) cos 2θ + κ2(P ) sin 2θ .从Euler 公式来看,曲面在一点附近的弯曲状况,主要依赖于两条法截线在该点的弯曲状况,这两条法截线的切向向量是Weingarten 变换的特征向量;这是Euler 截线法有效性的理论支持,同时也揭示出进一步考虑Weingarten 变换的特征值和特征方向的意义.以下两节将据此讨论.习 题⒈ 对于双曲抛物面 r = (u + v , u - v , uv ) ,试求:① Weingarten 矩阵 ω ;② Weingarten 变换 W 的特征值 κ1 和 κ2 ;③ 在点 (0, 0, 0) 处,Weingarten 变换的单位特征向量.⒉ 试证:在曲面上的任意一点之处,沿着两个正交的切方向的法曲率之和为常数. ⒊ 给定曲面上的一点,设此点处的Weingarten 变换 W 的两个特征值 κ1 ≠ κ2 .在该点处,沿着任意两个夹固定角 θ0 的切方向的法曲率之和为常数,试证:θ0 是直角.⒋在曲面的Weingarten变换W之下,若a, b∈T P-{0} 满足W(a)•b= 0 ,则称两个切向a和b是相互共轭的.试证:①W的单位正交特征向量ξ1和ξ2在切点是相互共轭的;②自然切向量场r1和r2处处相互共轭的充要条件为Ω12≡ 0 ;③切向量场a=a i r i和自身处处相互共轭的充要条件为a i a jΩij≡ 0 .⒌回避线性变换语言,则采用下列所示步骤也可确定曲面在一点处的法曲率关于方向的最值情况.给定曲面在该点的两个基本形式系数矩阵g, Ω以及Weingarten矩阵ω,作二元实函数f(λ1, λ2) =λiΩijλjλi g ijλj , (λ1, λ2) ≠ (0, 0) .试证:①f(μλ1, μλ2) = f(λ1, λ2) , ∀μ∈R-{0} ;②f一定存在最大值和最小值;③f的最值是ω的两个特征值κ1和κ2,f的最值点是ω的两个特征方向向量;④f取常值的充要条件是ω以任何非零向量为特征向量;⑤当f不取常值时,最值κ1≠κ2.并且,此时f的相应最值点 (ξi1, ξi2) 满足ξ1i g ijξ2j= 0 , ξ1iΩijξ2j= 0 .。
两曲面的第二基本形式预期主曲率没有关系判断题
1.曲面的结构方程指的是Gauss-Bonnet公式( )。
2.任何曲面上的直线都是测地线( )。
3.曲面的第一基本形式与参数的选取无关( )。
4.圆柱面上的直线都是测地线( )。
5.两曲面的第二基本形式不同则其 Gauss 曲率不同( )。
6.如果一个一一对应保持两张曲面间的任意曲线的长度不变,则称该对应为这两个曲面的等距变换( )。
7.曲面的第一、二基本形式都与参数的选取无关( )。
8.两曲面的第二基本形式与其主曲率没有关系( )。
9.I= 2du²+6dudv+3dv²可以作为曲面的第一基本形式( )。
10.曲面的协变微分是平面上普通微分的推广( )。
【答案】1-5 FTTTF 6-10TFFFT。
第四章曲面的第二基本形式与曲面上的曲率§6曲面的特殊参数网按照第三章§5定理1的一般性结论,本节具体讨论两种特殊参数网.一.曲率线和曲率线网鉴于主曲率和主方向在曲面弯曲程度刻画中的重要地位,利用主方向向量场构造相应的参数网将是有意义的.定义1若曲面S上的曲线C的切向总是S的主方向,则称曲线C为曲面S的一条曲率线.注记1①曲率线就是曲面上的主方向场的积分曲线.②对于全脐曲面而言,其上任意一条曲线都是曲率线;因而对于平面和球面而言,曲率线没有特别意义.而在曲面的非脐点处,有且仅有正交的主方向,因而对应有两条正交的曲率线.对于曲面S: r(u1, u2) 上的曲线C: u i=u i(s) , i= 1, 2 ,其单位切向T(s) =r i d u id s成为主方向的充要条件为沿C成立W(T) =λT,由(5.3) 式化为(6.1)( d u2d s)2- d u1d sd u2d s( d u1d s)2g11g12g22Ω11Ω12Ω22= 0 .因而,曲率线微分方程由 (5.3) 式或由 (6.1) 式给定,也经常写为(6.2)(d u2)2-d u1d u2 (d u1)2E F GL M N= 0 .例1对于正则的旋转面S: r(u, v) = ( f(v) cos u , f(v) sin u , h(v)) ,证明其经线和纬线都是曲率线.证明:易知旋转面S的相应基本形式系数分别为E=f 2 , F= 0 , G= (f')2+ (h')2 ,L = -f h '(f ')2 + (h ')2 , M = 0 , N = f "h ' - f 'h "(f ')2 + (h ')2, 故 S 的曲率线方程为d v 2 - d u d v d u 2 f 2 0 (f ')2 + (h ')2 -f h '(f ')2 + (h ')2 0 f "h ' - f 'h "(f ')2 + (h ')2= 0 .对 S 的经线 v 线,u = const. 即 d u = 0 ,显然适合该方程;同理,对 S 的纬线 u 线,v = const. 即 d v = 0 ,同样适合该方程.故 S 的经、纬线都是曲率线. □从上例可见,旋转面上的经纬参数网是正交网并且坐标曲线都是曲率线.在曲面上,由处处正交的曲率线所构成的参数网通常称为正交曲率线网;而对于无脐点的曲面,若存在曲率线所构成的参数网,则该网处处正交,此时正交曲率线网也简称为曲率线网.关于曲率线网的性质有下列结果,列为定理.定理1 已知正则曲面 S : r (u , v ) .① 若 S 的第一和第二基本形式系数矩阵处处同时对角化,即 F = M ≡ 0 ,则其两族坐标曲线都是曲率线,即 (u , v ) 参数网为正交曲率线网; ② 若 S 无脐点,并且 (u , v ) 坐标曲线都是曲率线,则 F = M ≡ 0 ; ③ 若 S 无脐点,则局部存在参数使坐标曲线网构成曲率线网.证明 ① 由曲率线微分方程,结论是显然的.② 由曲率线的定义知 r u 和 r v 都是主方向向量,并且由曲面正则性知道 r u 和 r v 是处处线性无关的.故由主方向的正交性知道 F ≡ 0 .再由曲率线微分方程 (6.2) 式,将 d u :d v = 1:0 和 d u :d v = 0:1 分别代入,得0 0 1E 0 G L M N ≡ 0 ≡ 1 0 0E 0 G L M N.此即 EM ≡ 0 ≡ GM ,从而由第一基本形式的正定性得知 M ≡ 0 .③ 此时两族单位正交主方向向量场在 S 上处处线性无关并且连续可微.故由第三章§5定理1即知,局部存在参数使两族坐标曲线分别为单位正交主方向向量场的两族积分曲线,此即构成曲率线网. □推论1 已知正则曲面 S : r (u , v ) 无脐点.则 (u , v ) 坐标曲线网构成曲率线网的充要条件为 S 的第一和第二基本形式系数矩阵处处同时对角化.注记2 ① 在无脐点 S 的曲率线网之下,Weingarten 矩阵简化为ω = Ω g -1 = ⎝⎛⎭⎫L 00 N ⎝ ⎛⎭⎪⎫1 E 0 0 1 G = ⎝ ⎛⎭⎪⎫L E 0 0 N G ; 此时主曲率分别简化为 κ1 = L E , κ2 = N G,相应的单位主方向分别简化为 ξ1 = r 1 E , ξ2 = r 2 G. ② 在曲面的孤立脐点附近,曲率线网的存在性和正交性在脐点处并不能保证.③ 对于全脐曲面,局部总存在正交曲率线网.此时正交曲率线网同样使第一和第二基本形式系数矩阵处处同时对角化.理由可参见定理的证明过程.曲率线的特征也可以用曲面单位法向的行为或法线的行为来刻画. 定理2(Rodriques 公式) 已知正则曲面 S : r (u 1, u 2) 的弧长参数化曲线 C : r (u 1(s ), u 2(s )) .C 是曲率线的充要条件为:沿 C 存在函数 λ(s ) ,使 d n d s = - λ(s ) d r d s, 即沿 C 成立 d n = - λ(s ) d r .证明 由曲率线定义和Weingarten 公式,下列条件等价是显然的:C 是曲率线⇔沿 C 存在函数 λ(s ) 使 W (T ) = λ(s ) T⇔沿 C 存在函数 λ(s ) 使 d n = - λ(s ) d r . □推论2 正则曲面 S 上的曲线 C 是曲率线的充要条件为: S 的法线沿C 所织成的直纹面可展.证明 对于正则曲面 S : r (u 1, u 2) 上的弧长参数化曲线 C : a (s ) = r (u 1(s ), u 2(s )) ,记 l (s ) = n (u 1(s ), u 2(s )) ,S 的法线沿 C 所织成的直纹面即为 S *: r *(s , t ) = a (s ) + t l (s ) .由直纹面可展的解析条件,S * 可展的解析条件化为0 = (a '(s ), l (s ), l '(s )) = ⎝⎛⎭⎫d r d s , n , d n d s . 现若曲线 C 是曲率线,则由上式和Rodriques 公式即知 S * 可展.反之,若S* 可展,则由解析条件即知S的两个切向量d rd s和d nd s平行,从而沿C存在函数λ(s) 使 d n=-λ(s) d r.再由Rodriques公式即知曲线C是曲面S上的曲率线.□利用上面这个结论观察旋转面的经纬线,可直观看到例1的结果.在§8之中,曲率线网将用来讨论可展曲面的曲率特征.二.渐近曲线和渐近曲线网上面已经看到,作为法曲率关于方向的最值,主曲率是曲面上的重要几何量.接下来将简单介绍一下对应于法曲率零值的切方向场及其积分曲线.定义2若曲面S上在点P处沿切向a∈T P的法曲率取零值,则称切向a∈T P为S在点P处的一个渐近方向;若曲面S上的曲线C的切向量总是S 上的渐近方向,则称C为S的一条渐近曲线.注记3①从Euler公式易见,存在渐近方向的充要条件是曲面的Gauss曲率非正.②渐近方向a∈T P是T P上的Weingarten变换的自共轭方向,即W(a)•a= 0 .③曲面上的直线一定是曲面上的渐近曲线.曲面S: r(u1, u2) 上渐近曲线的微分方程为Ωij d u i d u j= 0 .在S上,由渐近曲线所构成的参数网通常称为渐近曲线网.类似于对曲率线网的讨论,对于渐近曲线网可证(留作习题)下述结论.定理3已知正则曲面S: r(u, v) .则 (u, v) 坐标曲线网构成渐近曲线网的充要条件为S的第二基本形式系数满足Ω11=Ω22≡ 0 .习题⒈对可展曲面,试证:直母线既是渐近曲线也是曲率线,并且过非脐点处的另一族曲率线是直母线的正交轨线.⒉设两张正则曲面S和S* 有正则交线C,并且S和S* 沿着C具有恒定的交角.试证:C是S的曲率线的充要条件为C是S* 的曲率线.⒊设两张可展曲面S和S* 有正则交线C,并且S和S* 的直母线分别沿着C处处正交于C.试证:S和S* 沿着C具有恒定的交角.⒋设曲面S上的一条曲率线C不是渐近曲线,并且C的密切平面与S的切平面具有恒定的交角.试证:C是平面曲线.⒌设正则曲面S由右手直角坐标系O-xyz下的隐式方程Q(x, y, z) = 0 确定.试证S的曲率线微分方程为d x d y d zQ x Q y Q zd Q x d Q y d Q z= 0 .⒍证明定理3.⒎试证:若曲面在一点处具有三个两两不平行的渐近方向,则该点必为平点.⒏已知曲面S在每一点处具有负Gauss曲率.试证:曲面S在每一点处的主方向平分该点处的渐近方向.⒐设曲面S上的正则曲线C无逗留点.试证:C为S上的渐近曲线的充要条件为C的密切平面与S的切平面重合.⒑设无逗留点曲线C: u i=u i(s) 为曲面S: r(u1, u2) 上的弧长参数化渐近曲线,以τ为挠率函数.试证:沿曲线C,①S的Gauss曲率K=-τ 2;②τ=1|g|( d u2d s)2- d u1d sd u2d s( d u1d s)2g11g12g22Ω11Ω12Ω22.。
第四章 曲面的第二基本形式与曲面上的曲率
§5 曲面上的曲率概念
利用上一节所作的准备,围绕曲面弯曲状况的刻画,本节将引入曲面上的基本的和重要的曲率概念,并简要讨论相关的几何体.
一.主曲率
定义1 曲面 S 上的点 P 处的法曲率关于切方向的两个最值,分别称为曲面 S 在点 P 处的主曲率;使得法曲率达到最值的两个切方向,分别称为曲面 S 在点 P 处的主方向.
注记1 ① Weingarten 变换的特征值和特征方向,分别是曲面的主曲率和主方向.
② 当两个主曲率 κ1(P ) ≠ κ2(P ) 时,曲面在点 P 处有且仅有正交的两组主方向,每一组的单位化向量分别就是Weingarten 变换的单位正交特征向量.而当两个主曲率 κ1(P ) = κ2(P ) 时,曲面在点 P 处的任何非零切向都是主方向,Weingarten 矩阵 ω(P ) = κ1(P )I 2 ,即 Ω(P ) = κ1(P )g (P ) .
主曲率和主方向的计算,自然归结为Weingarten 变换的特征值和特征方向的计算,也就是Weingarten 矩阵的特征值和特征方向的计算.即: ① 对于主曲率的算法,当易知Weingarten 矩阵 ω 之时,方程为 (4.3) 式,或直接写为
(5.1) |ω - λI 2 | = 0 ;
等价地,当易知系数矩阵 Ω 和 g 之时,其方程可变形为
(5.2) |Ω - λg | = 0 .
② 对于主方向的算法,各种等价算式为
a = a i r i ≠ 0 为主方向,即非零切方向 a 1:a 2 为主方向
⇔ ∃λ , ∍(a 1, a 2)ω = λ(a 1, a 2) , (a 1, a 2) ≠ (0, 0)
⇔ ∃λ , ∍(a 1, a 2)Ω = λ(a 1, a 2)g , (a 1, a 2) ≠ (0, 0)
⇔ det. ⎝⎛⎭⎫(a 1, a 2
)Ω (a 1, a 2)g = 0
⇔(a2)2-a1a2 (a1)2
g11g12g22
Ω11Ω12Ω22
= 0 .
主方向所对应的微分方程通常写为
(5.3)
(d u2)2-d u1d u2 (d u1)2
g11g12g22
Ω11Ω12Ω22
= 0 .
定义2若曲面S在点P处的两个主曲率相等,则称点P为曲面S上
的一个脐点.若曲面S处处为脐点,则称曲面S为全脐曲面.若脐点处的主曲率为零,则称之为平点;若脐点处的主曲率不为零,则称之为圆点.
注记2全脐曲面S的法曲率只与点有关而不依赖于切向选取,故只有平面和球面两类;平面上各点为平点,球面上各点为圆点.全脐曲面主方向所对应的微分方程是蜕化的恒等式.
二.Gauss曲率和平均曲率
定义3对于正则曲面S,其在点P处的两个主曲率的乘积K,称为其在点P处的Gauss曲率或总曲率;其在点P处的两个主曲率的算术平均值H,称为其在点P处的平均曲率.
注记3①注意到(4.4)-(4.5) 式,Gauss曲率和平均曲率分别具有用Weingarten矩阵或两个基本形式系数的表达式,分别列为
(5.4)K=|ω|=|Ω|
|g|
=
LN-M2
EG-F2
,
(5.5) H= tr.ω
2=
LG- 2MF+NE
2(EG-F2)
.
②主曲率方程 (4.3) 式现可改写为
(5.6)λ2- 2Hλ+K= 0 ;
其中H 2-K= (κ1-κ2)2
4≥ 0 .
③Gauss曲率在容许参数变换下不变;平均曲率在保向参数变换下不变,在反向参数变换下变号.
④当曲面三阶连续可微时,Gauss曲率和平均曲率分别是连续可微函数;此时,两个主曲率函数
(5.7)κi=H±H2-K , i= 1, 2
处处连续,并且在非脐点处连续可微.
⑤ 平均曲率等于法曲率按切方向的积分平均值(留作习题). ⑥ 平均曲率不是等距不变量.反例如圆柱面和平面.
例1 证明可展曲面的Gauss 曲率 K ≡ 0 .
证明 对可展曲面 S 的直纹面参数化 r (u , v ) = a (u ) + v l (u ) ,由可展定义得知 n v ≡ 0 ,故其第二基本形式系数满足
M = - r u ∙n v ≡ 0 , N = - r v ∙n v ≡ 0 ,
于是
K = LN - M 2 EG - F 2
≡ 0 . □ 在上例中,若取准线使 a '∙l ≡ 0 且 |l | ≡ 1 ,则可展曲面 S 的第一和第二基本形式系数矩阵同时对角化,Weingarten 矩阵则为特征值对角阵,而且
(5.8) κ1 = L E
, κ2 ≡ 0 . 三.Gauss 映射和第三基本形式
Gauss 在考察曲面的弯
曲程度刻画时,注意到曲面
的单位法向在单位球面上的
行为对于曲面弯曲状况的反
映,并进一步明确了两者的
依赖程度,进而在曲面论中
做出了卓有成效的工作.观
察熟知的一些曲面,比如平
面、圆柱面、圆锥面、椭球
面、双叶双曲面、双曲抛物面等等,可以直观感受到单位法向不同的行为和曲面不同的弯曲状况之间有着密切联系.
定义4 对于 C 3 正则曲面 S : r (u 1, u 2) 及其单位法向量场 n (u 1, u 2) ,曲面 S 到以原点为心的单位球面 S 2(1) 上的映射
(5.9) G : S →S 2(1) r (u 1, u 2)→G (r (u 1, u 2)) = n (u 1, u 2)
称为曲面 S 的Gauss 映射.二次微分形式
图4-5
(5.10) Ⅲ= d n∙d n
称为曲面S的第三基本形式.性质①n1⨯n2=K r1⨯r2.
②|K(P)|=lim
U收缩至P A(G(U))
A(U),其中P∈U⊂S, U为单连通区域,
A(G(U)) 是G(U)⊂S2(1) 的面积,A(U) 是U⊂S的面积.
③Ⅲ- 2HⅡ+KⅠ= 0 .
证明①由Weingarten公式得
n1⨯n2= [-(ω11r1+ω12r2)]⨯[-(ω21r1+ω22r2)]
=|ω|r1⨯r2=K r1⨯r2.
②A(U) =⎰⎰
r-1(U)
| r1⨯r2| d u1d u2 ,
A(G(U)) =⎰⎰
r-1(U) | n1⨯n2| d u1d u2=⎰⎰
r-1(U)
|K|| r1⨯r2| d u1d u2.
而由积分中值定理,∃P*∈U使
⎰⎰r-1(U) |K|| r1⨯r2| d u1d u2=|K (P*)|⎰⎰
r-1(U)
| r1⨯r2| d u1d u2.
故而
lim U收缩至P A(G(U))
A(U)= lim
P*→P
|K (P*)|=|K (P)|.
③结论用系数矩阵等价表示为
(Ω g-1)g(Ω g-1)T- 2HΩ+K g≡ 0
⇔Ω g-1Ω- 2HΩ+K g≡ 0
⇔Ω g-1Ω g-1- 2HΩ g-1+K I2≡ 0
⇔ωω- (tr.ω)ω+|ω|I2≡ 0 .
而最后的等式对于二阶方阵总成立(用特征值理论则知是显然的),用元
素计算可直接验证为
ωi kωk j- (tr.ω)ωi j+|ω|δi j
=ωi1ω1j+ωi2ω2j- (ω11+ω22)ωi j+ (ω11ω22-ω12ω21)δi j≡ 0 .□
习题
⒈对于螺面r= (u cos v , u sin v , u+v) ,试求:
①主曲率κ1和κ2;
②Gauss曲率和平均曲率.
⒉试求球面的Gauss曲率和平均曲率与球面半径的关系.
⒊试证:平均曲率等于法曲率按切方向的积分平均值,即 2πH(P) =⎰2π
κ(P, θ) dθ.
⒋试证:直纹面的Gauss曲率处处非正.
⒌设正则曲面S: r(u1, u2) 当常数μ足够小时 1 - 2μH+μ2K> 0 .按参数相同作对应曲
面S*: r*(u1, u2) =r(u1, u2) +μn(u1, u2) ,其中n为曲面S的单位法向量场.试证:
①S和S* 在对应点具有相同的单位法向和法线;
②S和S* 在对应点的Weingarten矩阵具有关系式ω* =ω (I2-μω )-1;
③S和S* 在对应点的Gauss曲率和平均曲率具有关系式
K* =
K
1 - 2μH+μ2K
,H* =
H-μK
1 - 2μH+μ2K
;
④S的曲率线对应于S* 的曲率线.
⒍已知曲面S在一点处沿着一组等分周角的m个切方向的法曲率分别为κn(1), …,
κn(m),m> 2 .试证:S在该点的平均曲率H=κn(1)+…+κn(m)
m.
⒎试证:曲面S的第三基本形式恒为零的充要条件为S是平面.。