自适应控制基本原理-自校正控制40页PPT
- 格式:ppt
- 大小:5.58 MB
- 文档页数:40


自适应控制与应用自适应控制与应用第一章自适应控制基本概念第二章模型参考自适应系统设计初步第三章用李亚普诺夫稳定性理论设计MRAC第四章用波波夫超稳定性理论设计MRAC第五章自校正技术及自校正控制器调节器的设计第六章极点配置的自校正技术第一章自适应控制的基本概念1-1 自适应控制的产生1-2自适应控制的定义1-3 自适应控制的基本原理1-4 自适应控制系统的主要类型1-5自适应控制的应用1-1 自适应控制的产生传统的控制系统设计方法,通常是首先建立被控对象的数学模型,然后根据所建数学模型的特性设计控制器(控制律),实施控制。
为了要成功的设计一个控制系统,无论是常规的反馈控制系统还是最优控制系统,都必须要设计者事先知道被控对象的所有特征,及其结构和参数。
1-1 自适应控制的产生设计都要求事先掌握被控对象或被控过程的数学模型。
然而有些数学模型是很难事先确知的,或者由于种种原因,一些系统的数学模型会在运行过程中发生较大范围的变化,这就是说,设计者对系统的特性并不是完全掌控的,或者说系统的特性是不肯定的。
在这些情况下,常规控制就往往达不到预定的控制要求。
引起被控对象特性发生变化的主要原因有:(1)由于系统所处环境的变化而引起的被控对象的参数值的变化。
1-1 自适应控制的产生许多控制对象的数学模型随着时间或工作环境的改变而发生变化,而变化规律往往事先不知道。
例如:引起被控对象特性发生变化的主要原因有:(1)由于系统所处环境的变化而引起的被控对象的参数值的变化。
1-1 自适应控制的产生许多控制对象的数学模型随着时间或工作环境的改变而发生变化,而变化规律往往事先不知道。
(2)系统本身由于工作情况的变化而引起自身参数值的改变.1-1 自适应控制的产生当被控对象的数学模型参数在小范围内变化时,可用一般的反馈控制、最优控制或补偿控制等方法使得系统对外部的扰动或内部参数的小范围变动不很敏感,以达到预期性能。
而当被控对象的数学模型参数在大范围内变化时,上述方法就不能圆满解决问题了,为了使控制对象的参数在大范围变化时,系统仍能自动的工作于最优或次优状态,因而提出了自适应控制的问题。
自适应控制与自校正控制自适应控制和自校正控制是自动控制领域中两个重要的概念。
它们都旨在通过反馈机制来实现对系统的调节和优化。
在本文中,将对这两种控制方法进行详细的介绍和比较,并探讨其在实际应用中的优势和局限性。
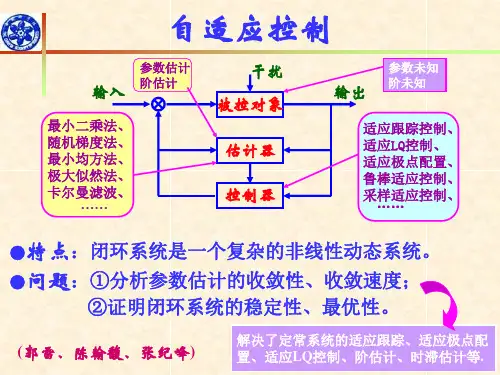
一、自适应控制自适应控制是一种根据被控对象的动态特性和外部环境变化来实现系统参数的自动调节的控制方法。
其核心思想是在控制系统中引入自适应算法,通过实时地观测和分析被控对象的输出信号,并对系统参数进行在线修正,以达到控制系统对不确定性和变异性的适应。
自适应控制通常包括以下几个关键步骤:1. 在线参数估计:通过对被控对象的输出信号进行实时采集和处理,估计出控制系统的参数,并不断地更新这些参数。
2. 自适应算法设计:根据所需的控制性能和被控对象的特性,设计合适的自适应算法。
常见的自适应算法包括最小均方误差算法(LMS)、最小二乘法(OLS)等。
3. 参数调节和修正:根据自适应算法的计算结果,对控制系统的参数进行调节和修正。
这个过程通常与反馈环节相结合,实现控制系统的自动调节。
自适应控制的优势在于其能够在系统参数发生变化或者外部环境变化时及时做出调整,从而保持控制系统的稳定性和鲁棒性。
它适用于那些被控对象参数难以准确获取或者易受外界干扰的情况下。
然而,自适应控制也存在一些局限性。
首先,自适应算法的设计和实现较为复杂,需要充分考虑系统的稳定性和性能要求。
其次,自适应控制对于被控对象的动态特性要求较高,不适用于那些动态特性变化较快的系统。
二、自校正控制自校正控制是一种能够通过比较反馈信号与期望信号之间的差异来实现系统调整和修正的控制方法。
其核心思想是在控制系统中引入误差信号,并通过对误差信号进行分析和处理,实现对系统的自动校正和调节。
自校正控制的关键步骤如下:1. 误差检测:通过将期望信号与反馈信号进行比较,计算得到误差信号。
2. 误差分析和处理:对误差信号进行分析和处理,得出对于系统调整和校正的策略。