二自适应控制理论基础
- 格式:ppt
- 大小:813.50 KB
- 文档页数:62

第一章 概述1.1 自适应控制的研究对象自适应控制是研究具有“不确定性”的控制系统的特性分析和综合(控制器设计)。
1. 系统不确定性产生的原因 1)内部不确定性(1)被控对象的结构(阶次)和参数由于建模误差引起的不确定性。
(2)被控对象的结构(阶次)和参数或者动态特性是时变的或随工作作条件改变而变化。
2)外部不确定性被控对象的运行环境(外部干扰)是随机信号而且它们的统计特性不确切知道或者是时变的。
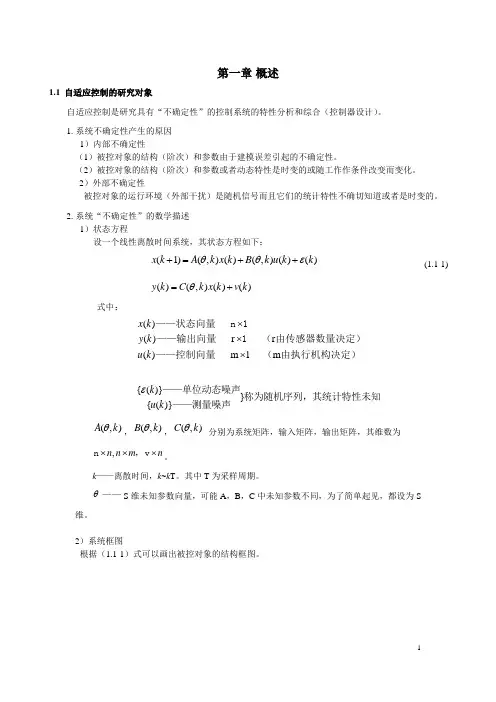
2. 系统“不确定性”的数学描述 1)状态方程设一个线性离散时间系统,其状态方程如下:(1)(,)()(,)()()x k A k x k B k u k k θθε+=++ (1.1-1)()(,)()()y k C k x k v k θ=+式中:()()r r ()m 1 m x k y k u k ⨯⨯⨯——状态向量 n 1——输出向量 1 (由传感器数量决定)——控制向量 (由执行机构决定){()}}{()}k u k ε——单位动态噪声称为随机序列,其统计特性未知——测量噪声(,)A k θ,(,)B k θ,(,)C k θ 分别为系统矩阵,输入矩阵,输出矩阵,其维数为,n n m n ⨯⨯⨯n ,v 。
k ——离散时间,k ~k T 。
其中T 为采样周期。
θ——S 维未知参数向量,可能A ,B ,C 中未知参数不同,为了简单起见,都设为S 维。
2)系统框图根据(1.1-1)式可以画出被控对象的结构框图。
1Z -(,)C k θ(,)B k θ(,)A k θ()u k ()k ε()x k ()y k ()v k (1)x k +图 1.1-1 被控对象的结构框图图中1z -是时间延迟因子,1()(1)x k z x k -=+,噪声{()k ε}和{v (k )}作用于对象的不同部位,对于线性系统,可以等效于作用在输出端的一个噪声。
其统计特性例如期望值、相关函数等由于不确定性而未知,或随时间变化。

自适应控制理论及其工程应用分析随着工业自动化和智能化的发展,自适应控制理论越来越成为研究热点。
自适应控制是指系统能够根据外部环境和内部的变化,自主地调节和优化控制参数,实现控制目标的科技手段。
自适应控制理论的发展不仅解决了许多传统控制理论难以解决的问题,同时也在多种领域得到广泛的应用。
1.自适应控制理论的理论基础自适应控制的核心是反馈控制,其思想是通过传感器获取系统的实时状态信息,根据前一时刻的输出数据和给定目标值,对控制器的参数进行在线调整,以实现控制目标的稳定和精度。
自适应控制理论主要包含两个部分:模型表示和参数估计。
模型表示是对系统的数学描述,包括系统的动态特征和非线性性质。
参数估计是指在系统运行过程中根据实时的测量值,对系统参数进行及时和准确地估计。
这一过程需要涉及到估计器的构造和设计。
2.自适应控制的现实应用自适应控制理论的应用范围非常广泛,像机器人控制、化工系统、空调自控系统、飞机制导系统、汽车控制等领域都有着广泛的应用。
以机器人自适应控制为例,机器人需要在不同的环境和场景下完成任务,这就需要机器人具备自主感知和调节的能力。
通过自适应控制技术,机器人可以实现对自己的运动状态和工作状态的监测和控制,从而完成任务。
3.自适应控制理论的进一步研究和发展自适应控制理论作为一种前沿和热门的研究领域,仍然面临着许多问题和挑战。
如何更好地描述和建模系统的复杂性,如何提高控制系统的鲁棒性和鲁棒性分析,如何实现多模型的自适应控制等问题都需要进一步探索和研究。
随着大数据和机器学习技术的发展,自适应控制理论也将逐渐向智能化、网络化方向发展。
综上所述,自适应控制理论是实现控制目标和优化系统性能的有效手段,其应用场景和深度还有广泛的拓展空间。
通过未来的研究和实践,自适应控制理论必将为人类的科技进步和生产生活的发展注入新的动力。
控制论与自适应控制的基本原理控制论和自适应控制是现代控制理论的两个重要分支,它们在系统控制中起着不可忽视的作用。
本文将详细讨论控制论和自适应控制的基本原理,揭示它们在控制领域中的应用和意义。
一、控制论的基本原理控制论是一种研究动态系统行为和控制方法的数学理论。
它的基本原理是通过设计和操纵系统的控制器,使系统在给定的条件下,达到所期望的状态或性能。
1. 反馈原理反馈是控制论中的核心概念,它将系统的当前状态与期望状态进行比较,并根据比较结果调整系统的行为。
反馈系统通常由传感器、比较器、控制器和执行器组成。
传感器用于获取系统的输出信号,比较器将输出信号与期望信号进行比较,控制器根据比较结果生成控制信号,执行器将控制信号转化为系统的控制输入。
2. 控制器设计控制器的设计是控制论中的关键任务之一。
根据系统的数学模型和性能指标,可以使用不同的控制策略来设计控制器。
常见的控制策略包括比例控制、积分控制、微分控制和模糊控制等。
控制器的设计旨在通过合理的控制算法,实现系统的稳定性、精度和鲁棒性。
3. 系统鲁棒性鲁棒性是控制系统对参数变化、干扰和噪声等外部因素的抵抗能力。
控制论中的鲁棒性分析主要通过灵敏度函数和稳定裕度来进行。
对于鲁棒性要求较高的系统,可以采用自适应控制方法来提高系统的鲁棒性。
二、自适应控制的基本原理自适应控制是一种根据系统的动态特性和环境变化,实时调整控制算法和参数的控制方法。
它的基本原理是通过模型辨识和参数更新,实现系统的自动调节和优化。
1. 模型辨识模型辨识是自适应控制的核心内容,它通过收集系统的输入和输出数据,利用辨识算法估计系统的数学模型。
常用的模型辨识方法包括最小二乘法、极大似然估计和频域辨识等。
模型辨识的结果可以用于控制算法的设计和参数的调整。
2. 参数更新参数更新是自适应控制的关键步骤,它通过比较系统的实际输出和模型预测输出,计算出控制算法中的参数修正量。
参数更新可以采用梯度下降法、最小二乘法和递推算法等方法进行,以实现系统的自适应调节和优化。
一、课件简介1.1 课件目的本课件旨在介绍自适应控制的基本概念、原理和应用,帮助学习者深入理解自适应控制理论,掌握自适应控制器的设计和分析方法。
1.2 课件内容本课件主要包括自适应控制的基本概念、自适应控制系统的类型及特点、自适应控制器的设计方法、自适应控制的应用领域等内容。
二、自适应控制的基本概念2.1 自适应控制的定义2.2 自适应控制的目标自适应控制的目标是使系统在未知干扰和参数变化的作用下,仍能达到预定的性能指标,包括稳态性能、动态性能和鲁棒性能等。
2.3 自适应控制的基本原理自适应控制的基本原理包括误差反馈、模型参考自适应控制和自校正控制等。
三、自适应控制系统的类型及特点3.1 类型自适应控制系统主要分为模型参考自适应控制、误差反馈自适应控制和模糊自适应控制等。
3.2 特点自适应控制系统的特点包括具有较强的鲁棒性、适应性和灵活性,能够在线调整控制器参数,适应系统的不确定性和变化。
四、自适应控制器的设计方法4.1 基于李雅普诺夫理论的设计方法4.2 基于最优控制理论的设计方法4.3 基于模糊逻辑的设计方法五、自适应控制的应用领域5.1 工业控制系统5.2 控制5.3 航空航天领域5.4 生物医学领域5.5 新能源领域六、自适应控制的关键技术6.1 系统建模与辨识系统建模与辨识是自适应控制的基础,涉及到对被控对象动态特性的估计和建模。
6.2 参数估计与更新参数估计与更新技术是自适应控制的核心,主要包括观测器设计、参数自适应律设计等。
6.3 控制律设计控制律设计是自适应控制的关键,需要保证系统在面临不确定性和外界干扰时,仍能达到期望的性能指标。
七、自适应控制的应用案例分析7.1 工业过程控制以工业生产线上的温度控制为例,介绍自适应控制如何在工业过程中应用,提高控制精度和稳定性。
7.2 导航以无人驾驶汽车为例,介绍自适应控制如何在复杂环境中实现精确的路径跟踪和避障。
7.3 航空航天器控制以卫星控制系统为例,介绍自适应控制如何在高动态和高不确定环境下保证控制系统的性能。
自动控制原理自适应控制知识点总结自动控制原理中的自适应控制是一种能够根据系统的变化自动调整控制参数的控制方法。
它通过不断地对系统进行监测和分析,实时地根据反馈信息调整控制参数,以实现系统在不同工况下的最优控制效果。
本文将对自动控制原理中的自适应控制进行知识点总结,包括自适应控制的基本原理、常见的自适应控制算法和应用领域等。
一、自适应控制的基本原理自适应控制的基本原理是根据系统的实时变化条件,自动调整控制器的参数,以适应系统的变化。
它的核心思想是通过对系统的监测和分析,不断地更新模型和参数,从而实现控制器的自适应调整。
在自适应控制中,通常会设置一个自适应机构,用于实时地对系统进行参数估计和更新。
这个自适应机构可以基于系统的输出信号来进行调整,也可以基于系统的输入信号来进行调整。
通过对输入输出信号的分析和处理,可以得到系统的模型和参数,从而实现对控制器参数的自适应调整。
二、常见的自适应控制算法1. 最小均方自适应滤波算法最小均方自适应滤波算法是一种基于最小均方误差准则的自适应控制算法。
它通过不断地更新滤波器的系数,来实现对系统的预测和滤波。
该算法可以根据系统的输入输出信号,通过计算误差信号的均方值来调整滤波器的系数,从而实现对系统的自适应调整。
2. 模型参考自适应控制算法模型参考自适应控制算法是一种基于模型参考的自适应控制算法。
它通过引入一个参考模型,将系统的输出与参考模型的输出进行比较,然后根据误差信号来更新控制器的参数。
该算法可以根据系统的输出信号和参考模型的输出信号,通过计算误差信号的变化情况来调整控制器的参数,从而实现对系统的自适应调整。
3. 递归最小二乘自适应控制算法递归最小二乘自适应控制算法是一种常用的自适应控制算法。
它通过递归地估计系统的参数,同时根据系统的输入输出信号进行参数调整。
该算法可以根据系统的输入输出信号,通过递归地计算参数估计值的变化情况来调整控制器的参数,从而实现对系统的自适应调整。
控制系统参数辨识及自适应控制技术研究摘要:控制系统参数辨识及自适应控制技术是当今控制领域中的热门研究方向之一。
本文旨在探讨控制系统参数辨识及自适应控制技术的研究现状、应用领域以及未来的发展方向。
我们将从理论基础、方法和算法、应用案例以及挑战与前景等方面进行论述,以期对读者深入理解和掌握相关的知识。
1. 引言控制系统参数辨识及自适应控制技术是指通过对控制系统内部参数进行辨识和实时调整的方法,实现对系统动态性能的优化和改进。
该技术在工业控制、机器人控制、智能交通等领域具有广泛的应用前景。
2.理论基础控制系统参数辨识及自适应控制技术的理论基础主要包括系统辨识和自适应控制两个方面。
系统辨识涉及参数辨识的方法和模型的建立,可以通过频域分析、时域分析、最小二乘法等方法来完成。
自适应控制则是指通过对系统参数的实时调整,使得系统能够自动跟踪和抑制外部扰动,提高系统性能。
3. 方法与算法控制系统参数辨识及自适应控制技术的方法和算法繁多。
其中,模型参考自适应控制、模型预测控制、直接自适应控制等是常用的自适应控制方法。
而广义最小二乘法、神经网络、遗传算法等则是常用的参数辨识算法。
4. 应用案例控制系统参数辨识及自适应控制技术在工业、交通、机器人等领域都有广泛的应用。
在工业领域中,该技术可以应用于控制系统的优化和提升,实现生产效率的最大化。
在交通领域中,自适应控制可以用于智能交通信号灯的优化调度和交通流量的控制。
而在机器人领域中,该技术可以应用于机器人路径规划和运动控制,提高机器人的精确度和灵活性。
5. 挑战与前景尽管控制系统参数辨识及自适应控制技术已经取得了很大的进展,但仍然存在一些挑战。
首先,参数辨识需要大量的实验数据,而现实系统中往往很难获取充足的数据。
其次,自适应控制算法的设计和实现复杂,需要解决多变量、非线性以及时变系统的控制问题。
未来的发展方向主要包括改进参数辨识算法、研究更高级的自适应控制方法以及跨学科领域的合作。
2 随机自适应控制概念与理论基础2.1 随机控制与自校正控制概述自校正控制是当代自适应控制理论和技术的最重要分支之一。
自校正控制最初主要是针对随机控制系统的自适应问题而提出的,而这种按照自适应控制的观点所建立的随机控制系统就称为随机自适应控制系统。
顾名思义,随机自适应控制系统首先是一个控制系统,和常规反馈控制系统一样,设计它的目的也是对控制对象的被调量加以控制;其次它是一个随机控制系统,即针对具有各种随机扰动的环境,按照使系统的统计型控制性能指标达到最优或近似最优的目的所建立的系统;第三它是一个具有自适应功能的随机控制系统,即它的控制器参数是可调的,可以根据被控对象特性的改变而在线自动修改,并力图保持性能指标始终为最优。
对于一般控制系统的基本概念和理论,我们已不陌生,因此对自校正控制的研究应首先从随机控制开始,在此基础上再来讨论它的自适应控制问题。
2.1.1 随机控制简介什么是随机系统?简单说,受到各种随机因素影响的系统就是随机系统。
这些随机因素包括系统的干扰输入、系统输出与状态的测量噪声,甚至也包括受环境条件影响的系统参数的随机变化等。
和确定性系统相比,任一时刻随机系统的输入、输出、状态等都不是确定性的即完全可预知的量,而是随机变量,它们随时间的演变过程则构成了随机过程。
严格说,所有的实际控制系统都是随机系统或不确定系统,特别是对工业控制系统来说,其所处的环境通常都具有比较强的各种随机干扰,其被调量(输出)自然也是随机变量。
因此试图像确定性系统那样用一个确定的量来描述系统的控制性能已经不现实,而引入某种统计型性能指标来表征系统的控制品质无疑是合理的。
在这种情况下,所谓“系统优化”或“最优控制”就是要使这种统计型性能指标趋于极大或极小,即按照随机控制的观点进行控制器设计,这就构成了一个随机控制系统。
显然,随机控制是解决随机环境下系统控制问题的一个合理选择。
但是,尽管一个实际系统不可避免地要工作在一个具有或强或弱的随机干扰的环境下,却并非一定要按照随机控制的观点来进行控制器的设计。
自适应控制理论及其应用随着现代技术的不断发展,控制系统自适应性逐渐成为了控制理论研究的重要方向之一。
自适应控制理论在自动控制系统中得到了广泛应用,能够适应各种复杂变化的环境、情况和参数。
本文将介绍自适应控制理论的基本原理和应用。
一、自适应控制理论原理自适应控制理论是一种基于自适应算法的控制理论,主要解决控制系统中参数难以确定、无法稳定、受到干扰等问题。
自适应控制系统通过对输入和输出信号进行在线模型修正,从而达到适应环境和提高性能的目的。
常见的自适应控制方法有模型参考自适应控制法、最小均方自适应控制法、神经网络自适应控制法和滑模自适应控制法等。
其中,最小均方自适应控制法是应用最广泛的自适应控制方法之一。
最小均方自适应控制法是一种基于最小均方误差的自适应控制方法。
该方法在控制系统中建立实时反馈机制,通过不断调整控制器参数来实现控制。
在控制系统中,该方法可以提高控制系统的响应速度和稳定性,适应环境变化和干扰等问题。
二、自适应控制理论应用自适应控制理论在工程领域中得到了广泛应用,涉及到许多行业,如机械制造、电子、自动化控制、信息等。
下面就具体介绍一些应用。
1. 机械制造领域中的应用在机械制造领域,自适应控制理论的应用非常广泛,主要用于生产过程中的自动控制、质量控制和检测等方面。
通过在机械系统中加入传感器和信号处理设备,实现对加工过程和产品质量的实时监测和控制,从而提高了生产效率和产品质量。
2. 电子行业中的应用在电子行业中,自适应控制理论主要用于电路控制、电源控制、数字信号处理等方面。
应用自适应算法技术,可以解决电路中的非线性问题、稳定性问题、电源调节问题等,从而提高了电路的性能和稳定性。
3. 自动化控制领域中的应用在自动化控制领域中,自适应控制理论可以应用于诸如温度、压力、流量的自适应调节和定位控制等方面。
应用自适应控制技术,可以实现对自动化系统的实时控制和调节,从而提高控制系统的性能和稳定性。
4. 信息领域中的应用在信息领域中,自适应控制理论主要应用于数据处理、机器学习等方面。