自适应控制_新版_1ppt课件
- 格式:ppt
- 大小:318.00 KB
- 文档页数:40

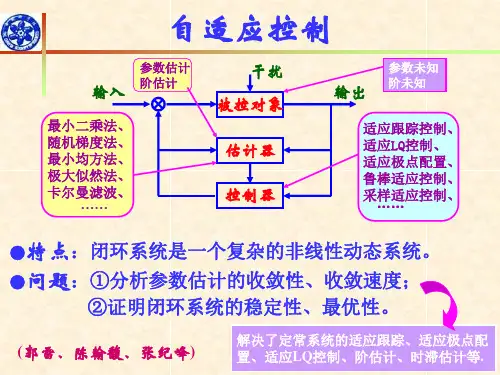
一、概述1.自适应控制的控制对象:自适应控制的研究对象是具有一定程度不确定性的系统,这里所谓的“不确定性”是指描述被控对象及其环境的数学模型不是完全确定的,其中包含一些未知因素和随机因素。
2.自适应控制的基本思想是:在控制系统设计时,不断地测量受控对象的状态,性能或参数,从而“认识”或“掌握”系统当前的运行状况,并将系统当前的性能指标与期望的指标相比较,从而根据比较结果作出决策,来改变控制器的结构、参数或根据自适应的规律来改变控制作用,以保证系统运行在某种意义下最优或次优的状态。
3.吉布森1962年提出以下定义:(1)在线辨识:一个自适应控制系统必须能提供对象当前状态的连续信息;(2)决策控制:它必须将系统当前的性能和希望的或者最优的性能进行比较,并作出使系统趋向最优性能的决策;(3)在线修正:它必须对控制器进行修正以便是系统趋向最优状态。
这三方面的功能是自适应系统所必须具有的功能。
4.与其他控制方法的比较自适应控制和常规的反馈控制和最优控制一样,也是一种基于数学模型的控制方法,所不同的只是自适应控制所依据的关于模型和扰动的先验知识比较少,需要在系统的运行过程中去不断提取有关模型的信息,使模型逐步完善。
具体地说,可以依据对象的输入输出数据,不断地辨识模型参数,这个过程称为系统的在线辩识。
随着生产过程的不断进行,通过在线辩识,模型会变得越来越准确,越来越接近于实际。
既然模型在不断的改进,显然,基于这种模型综合出来的控制作用也将随之不断的改进。
在这个意义下,控制系统具有一定的适应能力。
比如说,当系统在设计阶段,由于对象特性的初始信息比较缺乏,系统在刚开始投入运行时可能性能不理想,但是只要经过一段时间的运行,通过在线辩识和控制以后,控制系统逐渐适应,最终将自身调整到一个满意的工作状态。
再比如某些控制对象,其特性可能在运行过程中要发生较大的变化,但通过在线辩识和改变控制器参数,系统也能逐渐适应。
常规的反馈控制系统对于系统内部特性的变化和外部扰动的影响都具有一定的抑制能力,但是由于控制器参数是固定的,所以当系统内部特性变化或者外部扰动的变化幅度很大时,系统的性能常常会大幅度下降,甚至是不稳定。

自适应控制与应用自适应控制与应用第一章自适应控制基本概念第二章模型参考自适应系统设计初步第三章用李亚普诺夫稳定性理论设计MRAC第四章用波波夫超稳定性理论设计MRAC第五章自校正技术及自校正控制器调节器的设计第六章极点配置的自校正技术第一章自适应控制的基本概念1-1 自适应控制的产生1-2自适应控制的定义1-3 自适应控制的基本原理1-4 自适应控制系统的主要类型1-5自适应控制的应用1-1 自适应控制的产生传统的控制系统设计方法,通常是首先建立被控对象的数学模型,然后根据所建数学模型的特性设计控制器(控制律),实施控制。
为了要成功的设计一个控制系统,无论是常规的反馈控制系统还是最优控制系统,都必须要设计者事先知道被控对象的所有特征,及其结构和参数。
1-1 自适应控制的产生设计都要求事先掌握被控对象或被控过程的数学模型。
然而有些数学模型是很难事先确知的,或者由于种种原因,一些系统的数学模型会在运行过程中发生较大范围的变化,这就是说,设计者对系统的特性并不是完全掌控的,或者说系统的特性是不肯定的。
在这些情况下,常规控制就往往达不到预定的控制要求。
引起被控对象特性发生变化的主要原因有:(1)由于系统所处环境的变化而引起的被控对象的参数值的变化。
1-1 自适应控制的产生许多控制对象的数学模型随着时间或工作环境的改变而发生变化,而变化规律往往事先不知道。
例如:引起被控对象特性发生变化的主要原因有:(1)由于系统所处环境的变化而引起的被控对象的参数值的变化。
1-1 自适应控制的产生许多控制对象的数学模型随着时间或工作环境的改变而发生变化,而变化规律往往事先不知道。
(2)系统本身由于工作情况的变化而引起自身参数值的改变.1-1 自适应控制的产生当被控对象的数学模型参数在小范围内变化时,可用一般的反馈控制、最优控制或补偿控制等方法使得系统对外部的扰动或内部参数的小范围变动不很敏感,以达到预期性能。
而当被控对象的数学模型参数在大范围内变化时,上述方法就不能圆满解决问题了,为了使控制对象的参数在大范围变化时,系统仍能自动的工作于最优或次优状态,因而提出了自适应控制的问题。
一、课件简介1.1 课件目的本课件旨在介绍自适应控制的基本概念、原理和应用,帮助学习者深入理解自适应控制理论,掌握自适应控制器的设计和分析方法。
1.2 课件内容本课件主要包括自适应控制的基本概念、自适应控制系统的类型及特点、自适应控制器的设计方法、自适应控制的应用领域等内容。
二、自适应控制的基本概念2.1 自适应控制的定义2.2 自适应控制的目标自适应控制的目标是使系统在未知干扰和参数变化的作用下,仍能达到预定的性能指标,包括稳态性能、动态性能和鲁棒性能等。
2.3 自适应控制的基本原理自适应控制的基本原理包括误差反馈、模型参考自适应控制和自校正控制等。
三、自适应控制系统的类型及特点3.1 类型自适应控制系统主要分为模型参考自适应控制、误差反馈自适应控制和模糊自适应控制等。
3.2 特点自适应控制系统的特点包括具有较强的鲁棒性、适应性和灵活性,能够在线调整控制器参数,适应系统的不确定性和变化。
四、自适应控制器的设计方法4.1 基于李雅普诺夫理论的设计方法4.2 基于最优控制理论的设计方法4.3 基于模糊逻辑的设计方法五、自适应控制的应用领域5.1 工业控制系统5.2 控制5.3 航空航天领域5.4 生物医学领域5.5 新能源领域六、自适应控制的关键技术6.1 系统建模与辨识系统建模与辨识是自适应控制的基础,涉及到对被控对象动态特性的估计和建模。
6.2 参数估计与更新参数估计与更新技术是自适应控制的核心,主要包括观测器设计、参数自适应律设计等。
6.3 控制律设计控制律设计是自适应控制的关键,需要保证系统在面临不确定性和外界干扰时,仍能达到期望的性能指标。
七、自适应控制的应用案例分析7.1 工业过程控制以工业生产线上的温度控制为例,介绍自适应控制如何在工业过程中应用,提高控制精度和稳定性。
7.2 导航以无人驾驶汽车为例,介绍自适应控制如何在复杂环境中实现精确的路径跟踪和避障。
7.3 航空航天器控制以卫星控制系统为例,介绍自适应控制如何在高动态和高不确定环境下保证控制系统的性能。