- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、在电力系统方面,在60年代中期就提出用自适应方 法来实现锅炉燃烧效率的优化控制.
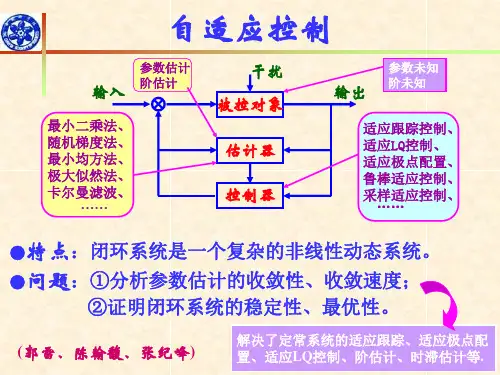
参数估计
被控系统
反馈调节器 图3 自校正控制系统
该系统有两个环 路,一个环路由 参数可调的调节 器和被控系统所 组成,称为内环, 它类似于通常的 反馈控制系统; 另一个环路由递 推参数估计器与 调节器参数计算 环节所组成,称 为外环.
四、自适应控制研究中的理论问题
自适应控制常常兼有随机性、非线性和时变等特征, 内部机理也相当复杂,所以分析这类系统十分困难. 目前,已被广泛研究的理论课题有稳定性、收敛性和 鲁棒性等,但取得的成果与人们所期望的还相差甚远. 下面简单介绍在自适应控制研究中的如下理论问题. •稳定性 •收敛性 •鲁棒性 •其它理论问题
1)稳定性
• 稳定性是一个控制系统设计中的首要目标,自适应 控制系统设计亦如此.
– 目前许多自适应控制系统的设计是以能保证整个系统 全局稳定为准则的. – 对确定性被控系统的自适应系统,稳定性分析和设计问 题相对来说研究得成熟一些. – 但对随机被控系统,则困难得多,取得的成果也有限.
• 自适应控制系统的收敛性是指其自适应规律是 否收敛于参数已知时的最优控制规律.
内环由调节 器与被控系统 组成可调系统, 外环由参考 模型与自适应 机构组成.
参考模型 前馈调节器 被控系统
反馈调节器 自适应机构 图2 模型参考自适应控制
3、自校正控制系统
自校正控制系统又称为参数自适应系统,它源于调节问题, 其一般结构如图3所示.
调节器参数 设计与计算 (自适应机构) 前馈调节器
一个自适应控制系统必须提供出被控系统的 当前状态的连续信息,也就是辨识对象,它 必须将当前的系统性能与期望的或者最优的 相比较,并作出使系统趋向期望或系统最优 性能的决策,最后,它必须对控制器进行适 当的修正以驱使系统走向最优状态。
二、自适应控制系统的发展
1、自适应控制的设想,最先是由考德威尔 (W.1.Caldwell) 于1950年提出来的。 2、自适应控制主要发展历程: 模型参考自适应方法: 50年代中期—美国麻省理工学院教授H.P.Whitaker首 先应用于参数最优化设计的模型参考自适应方法设计 直升机自适应自动驾驶仪提出的 60年代中期—Parks的基于Lyapunov稳定性理论的模 型参考自适应控制设计 60年代末期—Landau等人的基于Popov超稳定性理论 的模型参考自适应控制设计
的自适应是不够的.
因此,研究对更多的参数的变化以及结构的变化 的自适应是理论和应用发展的需要. 变增益机构
调节器
被控系统
2、模型参考自适应控制系统
模型参考自适应控制系统(ModeL Reference Adaptive Control Systems, MRACS)源于确定性伺服问题,其基本 结构如图2所示,它由两个环路所组成.
变增益机构 调节器 被控系统
图1 变增益自适应机构
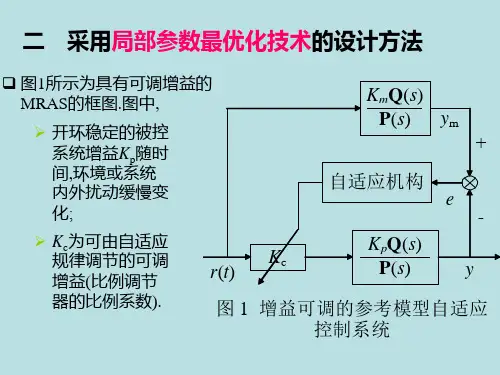
当参数因工作情况和环境等变化而变化时,通过 能测量到反映系统当前状态的系统变量,比照对系 统的运行的要求(或性能指标),经过计算并按规定的 程序来改变调节器的增益结构. 这种系统虽然仅仅是对增益的变化进行自适应调 节,难以完全克服系统模型未知或模型参数变化带 来的影响以实现完善的自适应控制,但是由于系统 结构简单,响应迅速,所以在许多实际系统中得到应 用.当然,对于复杂的被控系统,仅仅进行增益
自适应控制系统
(adaptive control system)
专业:机械设计制造及其自动化 班级:机自1101班 学号:110101134 姓名:王虹
目录
一、自适应控制的概括
二、自适应控制的发展历程
三、自适应控制系统的形式
四、自适应控制的研究中的理论问题 五、自适应控制的应用
一、什么是自适应控制?
3)鲁捧性
• 粗略地说,系统的鲁棒性(robustness)是指系统的某种 性能指标对系统内部和环境变化、扰动或未建模动 力学特性的不敏感性.
如,所讨论的是系统的稳定性的不敏感性,则称为鲁棒稳定 性. 自适应控制系统的鲁棒性主要是指:
– 在存在扰动和未建模动力学特性的条件下,系统保持其稳定性和性能的 能力.
五、自适应控制的应用
• 自适应控制理论及其系统的诞生是实 际工程系统的需要,最早的自适应方法 的研究就是针对飞机驾驶而进行的
随着自适应控制理论和设计方法的发展,简便 廉价的微型计算机的普及,都使得自适应控制 技术逐渐得到广泛的应用.
下面,将简单介绍一下自适应控制在 一些主要应用领域的应用情况.
一、在航海方面,首先是在大型油轮上由Astrom等学者采用 自校正调节方法实现了自适应自动驾驶仪,取代了原有的PID 调节器的自动驾驶仪.
实践表明,自适应自动驾驶仪能够在变化复杂的随机环境下, 如海浪,潮流,阵风的扰动下,以及在不同的负荷、不同的航速 下,使油轮都能够按照预定的航迹稳定可靠地航行,并取得了 良好的经济效益.
1
三、自适应控制系统的形式
因设计的原理和结构的不同,自适应控制ห้องสมุดไป่ตู้统大 概可分为如下几种形式:
3 1、 变 增 益 控 制 应、 控模 制型 系参 统考 自 适 2 、 自 校 正 控 制 系 统
1、变增益控制
这种系统的结构如图1所示,其结构 和原理比较直观,调节器按被控系统 的参数已知变化规律进行设计.
– 对自校正方法,自适应规律的收敛性问题直接与参数 估计环节的收敛性有关. – 无论对于MRACS或自校正控制系统,参数的收敛性问 题依然未能有很好的解决.
•
2)收敛性
Anderson在80年代初曾指出,缺乏系统持续激励的自适应系统, 由于其自适应规律未能一致性收敛,则被控系统的输出将发生间 歇性的“喷发(bursting)”现象.
1、Landau“自适应控制”的含义为:
利用可调系统(输入信号来调节它的性能) 的输入、状态和输出来测量,通过修改它的参 数或结构,或通过修改它的某个性能指标,将 其与规定的性能指标进行比较,然后由自适应 机构修改可调系统的参数或产生一个辅助信号, 以保持性能的系统指标接近于规定的性能指标。
2、Gibson“自适应控制”的定义为: