模型参考自适应控制.ppt
- 格式:ppt
- 大小:316.51 KB
- 文档页数:18

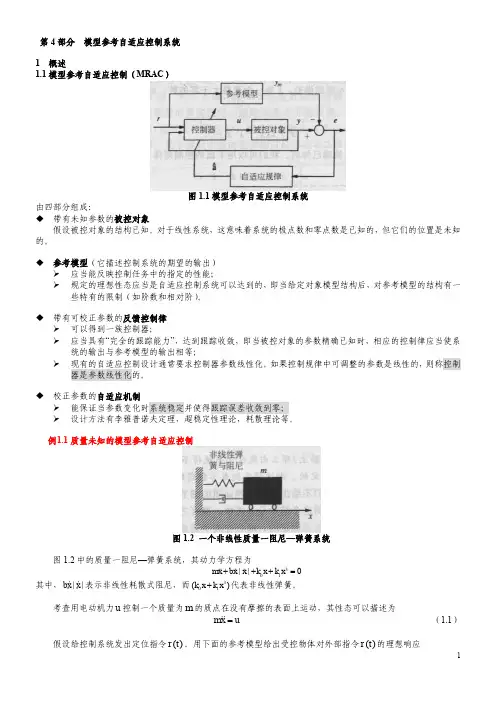
第4章模型参考自适应控制系统4.1 概述⏹MRAC系统具有多种结构形式,互相之间可以互相转换。
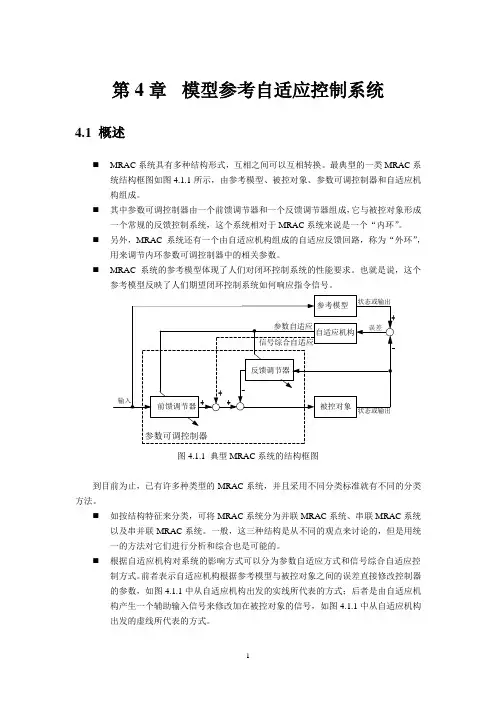
最典型的一类MRAC系统结构框图如图4.1.1所示,由参考模型、被控对象、参数可调控制器和自适应机构组成。
⏹其中参数可调控制器由一个前馈调节器和一个反馈调节器组成,它与被控对象形成一个常规的反馈控制系统,这个系统相对于MRAC系统来说是一个“内环”。
⏹另外,MRAC系统还有一个由自适应机构组成的自适应反馈回路,称为“外环”,用来调节内环参数可调控制器中的相关参数。
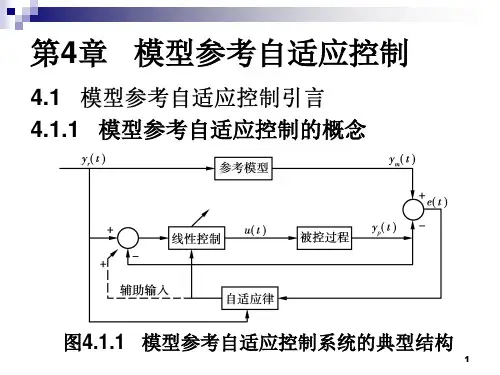
⏹MRAC系统的参考模型体现了人们对闭环控制系统的性能要求。
也就是说,这个参考模型反映了人们期望闭环控制系统如何响应指令信号。
图4.1.1 典型MRAC系统的结构框图到目前为止,已有许多种类型的MRAC系统,并且采用不同分类标准就有不同的分类方法。
⏹如按结构特征来分类,可将MRAC系统分为并联MRAC系统、串联MRAC系统以及串并联MRAC系统。
一般,这三种结构是从不同的观点来讨论的,但是用统一的方法对它们进行分析和综合也是可能的。
⏹根据自适应机构对系统的影响方式可以分为参数自适应方式和信号综合自适应控制方式。
前者表示自适应机构根据参考模型与被控对象之间的误差直接修改控制器的参数,如图4.1.1中从自适应机构出发的实线所代表的方式;后者是由自适应机构产生一个辅助输入信号来修改加在被控对象的信号,如图4.1.1中从自适应机构出发的虚线所代表的方式。
根据MRAC系统的设计方法可以分为如下三类:基于局部参数最优化的方法、基于Lyapunov稳定性理论的方法以及基于Popov超稳定性理论的方法。
⏹基于局部参数最优化的方法是最早采用的MRAC系统设计方法,通常称为MIT律。
⏹基于Lyapunov稳定性理论的方法是Butcharty及Parks于六十年代中期相继提出的,这种方法与局部参数最优化方法相比,不仅可保证系统的稳定性,还具有自适应速度快的优点。
⏹由法国学者Landau于1969年提出的基于Popov超稳定性理论的方法,主要是以Popov超稳定性理论为基础,由于不需要选择Lyapunov函数,并且能给出一族自适应规律,从而该方法有利于设计者结合实际系统灵活地选择合适的自适应规律。
一 原理及方法模型参考自适应系统,是用理想模型代表过程期望的动态特征,可使被控系统的特征与理想模型相一致。
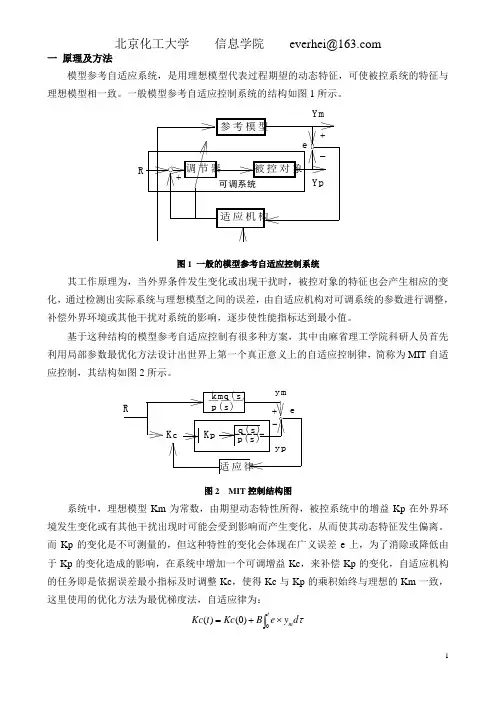
一般模型参考自适应控制系统的结构如图1所示。
图1 一般的模型参考自适应控制系统其工作原理为,当外界条件发生变化或出现干扰时,被控对象的特征也会产生相应的变化,通过检测出实际系统与理想模型之间的误差,由自适应机构对可调系统的参数进行调整,补偿外界环境或其他干扰对系统的影响,逐步使性能指标达到最小值。
基于这种结构的模型参考自适应控制有很多种方案,其中由麻省理工学院科研人员首先利用局部参数最优化方法设计出世界上第一个真正意义上的自适应控制律,简称为MIT 自适应控制,其结构如图2所示。
图2 MIT 控制结构图系统中,理想模型Km 为常数,由期望动态特性所得,被控系统中的增益Kp 在外界环境发生变化或有其他干扰出现时可能会受到影响而产生变化,从而使其动态特征发生偏离。
而Kp 的变化是不可测量的,但这种特性的变化会体现在广义误差e 上,为了消除或降低由于Kp 的变化造成的影响,在系统中增加一个可调增益Kc ,来补偿Kp 的变化,自适应机构的任务即是依据误差最小指标及时调整Kc ,使得Kc 与Kp 的乘积始终与理想的Km 一致,这里使用的优化方法为最优梯度法,自适应律为:⎰⨯+=tm d y e B Kc t Kc 0)0()(τYp Yme+__+R参考模型调节器被控对象适应机构可调系统———kmq(s)p(s)KcKpq(s)-----p(s)适应律Rymype+-MIT 方法的优点在于理论简单,实施方便,动态过程总偏差小,偏差消除的速率快,而且用模拟元件就可以实现;缺点是不能保证过程的稳定性,换言之,被控对象可能会发散。
二 对象及参考模型该实验中我们使用的对象为:122)()()(2++==s s s p s q K s G pp 参考模型为:121)()()(2++==s s s p s q K s G mm 用局部参数最优化方法设计一个模型参考自适应系统,设可调增益的初值Kc(0)=0.2,给定值r(t)为单位阶跃信号,即r(t)=A ×1(t)。