侧扫声呐概述
- 格式:doc
- 大小:366.00 KB
- 文档页数:5
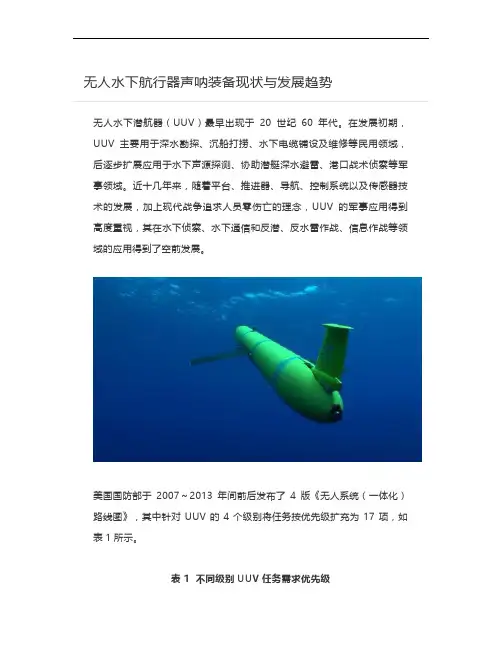
无人水下潜航器(UUV)最早出现于20世纪60年代。
在发展初期,UUV主要用于深水勘探、沉船打捞、水下电缆铺设及维修等民用领域,后逐步扩展应用于水下声源探测、协助潜艇深水避雷、港口战术侦察等军事领域。
近十几年来,随着平台、推进器、导航、控制系统以及传感器技术的发展,加上现代战争追求人员零伤亡的理念,UUV的军事应用得到高度重视,其在水下侦察、水下通信和反潜、反水雷作战、信息作战等领域的应用得到了空前发展。
美国国防部于2007~2013年间前后发布了4版《无人系统(一体化)路线图》,其中针对UUV的4个级别将任务按优先级扩充为17项,如表1所示。
表1 不同级别UUV任务需求优先级美海军于2000年和2004年分别发布两版《海军无人水下潜航器总体主规划》,将UUV(不分级别)的任务按优先顺序归纳为9类:①情报/监视/侦察(ISR);②水雷对抗(MCM);③反潜战(ASW);④检查/识别;⑤海洋调查;⑥通信/导航网络节点(CN3);⑦载荷投送;⑧信息作战;⑨时敏打击。
不论是《海军无人水下潜航器总体主规划》,还是《无人系统(一体化)路线图》,这几版文件中对于所有级别的UUV,情报/监视/侦察(ISR)、检查/识别和水雷对抗(MCM)这3项任务的排序都十分靠前,这也印证了在当今复杂国际环境下美国海军对于这3项UUV任务执行的迫切需求。
UUV执行各项任务无一不需要声呐的配合,尤其是对于ISR、检查/识别和MCM,声呐性能的优劣,往往是任务完成度的决定性因素。
根据功能的不同,UUV声呐装备主要分为三大类:通信声呐、导航声呐和探测声呐,如图1所示。
图1 UUV主要声呐装备通信声呐主要用于UUV与协同行动的其他UUV、母船(艇)或通信浮标之间的信息链接;导航声呐为UUV的安全航行和执行作业任务提供其位置、航向、深度、速度和姿态等信息;探测声呐主要用于警戒、探测、识别水中或沉底目标信息,对水下地形、地貌、地质进行勘察和测绘。
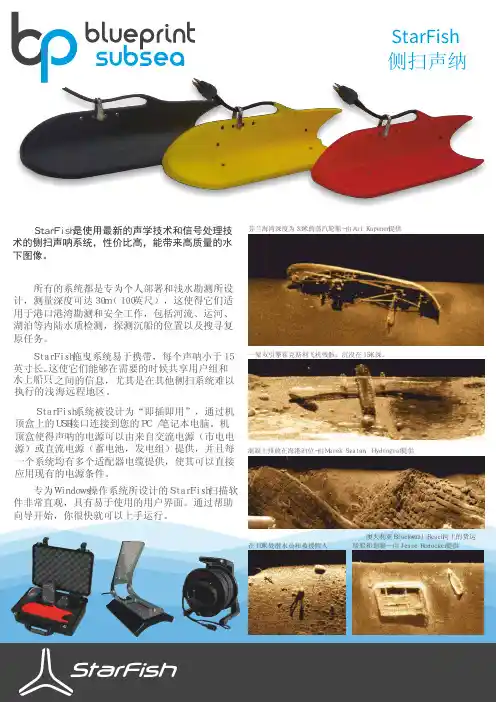
所有的系统都是专为个人部署和浅水勘测所设计,测量深度可达30m(100英尺),这使得它们适用于港口港湾勘测和安全工作,包括河流、运河、湖泊等内陆水质检测,探测沉船的位置以及搜寻复原任务。
海远程地区。
StarFish系统被设计为“即插即用”,通过机顶盒上的USB接口连接到您的PC /笔记本电脑。
机顶盒使得声呐的电源可以由来自交流电源(市电电源)或直流电源(蓄电池,发电组)提供,并且每一个系统均有多个适配器电缆提供,使其可以直接应用现有的电源条件。
专为Windows操作系统所设计的StarFish扫描软件非常直观,具有易于使用的用户界面。
通过帮助向导开始,你很快就可以上手运行。
一架双引擎霍克斯利飞机残骸,沉没在15米深。
芬兰海湾深度为33米的蒸汽轮船-由Ari Kapenen提供混凝土排放在海港泊位-由Marek Szatan,Hydrograf提供在10米处潜水员和救援假人 澳大利亚Blackwall Reach河上的货运驳船和划艇—由Jesse Rodocker提供 StarFish是使用最新的声学技术和信号处理技术的侧扫声呐系统,性价比高,能带来高质量的水下图像。
StarFish拖曳系统易于携带,每个声呐小于15英寸长。
这使它们能够在需要的时候共享用户组和水上船只之间的信息,尤其是在其他侧扫系统难以执行的浅声呐StarFish 990FStarFish 452FStarFish 450FStarFish 450HStarFish 453OEMBP00181BP00184BP00017BP00090(20m) or BP00066 (5m)BP00755StarFish的选择高清晰度系统,结合了1MHz的无线信号与0.3°水平波束宽度,适用于搜索和救援的应用。
450kHz无线信号操作与0.8°水平波束宽度,高达200米的宽度范围。
适用于调查应用。
入门级的声纳系统,结合450kHz无线信号操作与1.7°水450F系统的船载版本,适合小型近海船艇在浅水中操作。
多波束测深与测扫声呐的比较:(1)侧扫声纳是目前常用的海底目标(如沉船、水雷、管线等)探测工具,在测深领域,多波束以全覆盖和高效率证明了它的优越性。
由于多波束具有很高的分辨率,目前在工程上已经开始应用多波束进行海底目标物的探测。
(2)多波束的最大优点在于定位精度高,但其适用范围不如侧扫声纳广泛,尤其受到水深和波束角的限制,多波束和侧扫声纳在探测海底目标时具有很好的互补性,同时应用可以提高目标解译的准确性。
(3)侧扫声纳能直观地提供海底形态的声成像,但这种声像只能由目标影子长度等参数估计目标的高度,所以对数据解译人员的要求很高。
多波束测深系统主要用于进行水下地形测量。
(4)探测目标机制的差异:多波束是一种测深工具而并非成像系统,无法直接在记录纸上进行打印,必须先构建数字地形模型(digitalterrainmode,lDT M),再根据DTM构建地貌影像图,从而能够反映细微的地形起伏所导致的坡度和坡向变化;此外,多波束的中央波束探测效好,边缘波束效果差;多波束采用三维可视化的方法进行目标判断,在3DGIS系统中可以直接提取目标物的平面位置和高度,还能够从不同的角度进行观察,便于掌握目标物的形状特征。
但是,除非我们在进行测深的同时采集反向散射强度信息,否则我们无法得到与目标物的底质类型相关的信息,因此,多波束比较适合于沉船或者管线等容易根据形状进行判断的目标。
现在的侧扫声纳技术有两个缺点,首先它的横向分辨率取决于声纳阵的水平角宽,分辨率随距离的增加而线性增大,其次它给不出海底的准确深度。
当前只有两种声纳可做海底三维成像,即等深线成像和反向散射声成像,前一种是多波束测深声纳(如Multi-beamSonarSystem),后一种是测深侧扫声纳。
总体说来,前者适宜于安装在船上做大面积测量,后者适宜于安装在各类水下载体上,包括拖体、水下机器人(AUV)、遥控潜水器(ROV)和载人潜水器(HUV),进行细致的测量。
浅谈侧扫声呐结合多波束对水下物体进行探测的方法发表时间:2020-11-30T15:32:22.117Z 来源:《基层建设》2020年第23期作者:王德江[导读] 摘要:侧扫声呐是水下物体探测的一种常见的方法,多波束扫测也是水下物体探测的一种常见方法。
交通运输部南海航海保障中心广州海事测绘中心摘要:侧扫声呐是水下物体探测的一种常见的方法,多波束扫测也是水下物体探测的一种常见方法。
本文通过在大面积水下不明物体位置探测时采用侧扫声呐结合多波束进行探测,两钟常见的探测方法相结合后,优点显而易见,可以准确、高效的完成水下物体的探测。
关键词:侧扫声呐;多波束;水下物体探测1、研究背景受湛江海事局的委托,交通运输部南海航海保障中心广州海事测绘中心对湛江港龙腾航道与斗龙航道交汇处不明碍航物进行探测。
本次水下不明物体扫测范围为3.5KM*5KM,最后要明确探测范围内是否存在不明碍航物,如果存在不明碍航物需要提供该碍航物的准确坐标及附近最浅水深。
2、测量设备图2-1 KLEIN4900侧扫声呐系统图2-2 R2SONIC2024多波束测深系统3、实际案例的数据采集及处理3.1测线布设:根据规范要求,侧扫声呐按3.5*5公里范围内,按实地间距100米布设测线,测线总长共计约300公里。
多波束测线按海图水深减去探头吃水的2.5倍间距布设测深线,间距为实地15—50米,测线总长共计约700公里。
3.2船配改正:测量船体坐标系以姿态传感器为坐标原点;X轴:垂直船艏方向,指向船右舷为正;Y轴:沿船艏方向,指向船艏为正;Z轴:铅垂方向,向下为正。
3.3多波束校准:按照既定的校准方案,在海图上大约10m深的水域附近进行了系统校准。
校准的顺序为定位时延(Latency)、横摇偏差(Roll)、纵摇偏差(Pitch)、艏向偏差(Yaw)。
定位时延和纵摇偏差的校准在航道外平坦斜坡上进行,以不同的速度行驶,采集数据时使用等角波束模式;横摇偏差的校准在海底平坦且水深较大的地方,使用等距波束模式正反向行驶,船速保证前进方向的波束交迭≥100%;艏向偏差的校准在浅水有明显障碍物的两边布置两条相邻测线使用等距波束模式进行,相邻的线有稍大于15%的覆盖率。
工程结构物水下检测技术及其应用随着工程结构物的不断建设和使用,对其进行水下检测成为保证工程结构物安全性和可靠性的必要手段。
水下检测技术在船舶、海洋工程、水利工程、核电站和港口等领域具有广泛的应用。
本文将为大家详细介绍工程结构物水下检测技术及其应用。
声呐检测技术是应用最为广泛的水下检测技术之一、声呐系统通过向水中发射声波并接收回波来识别目标物体。
声呐可分为侧扫声呐、多波束声呐和多要素声呐。
侧扫声呐用于获取目标物体的形状和位置信息,多波束声呐可以获得目标物体的高分辨率图像,多要素声呐则能够获取目标物体的材料和物理性质。
声呐检测技术在海洋工程中用于定位海底管线、寻找潜水员和定位沉船等,而在水利工程中则用于检测堤坝的内部结构和土石方体的质量。
摄像和摄影技术用于获取目标物体的影像信息。
水下摄像系统通常由摄像机、光源和数据存储设备组成。
水下摄影技术和常规摄影技术相似,但由于水的折射和散射效应,所拍摄的照片需要进行后期处理以恢复真实的颜色和亮度。
这些技术在船舶检测、港口建设和水下考古等领域发挥着重要作用。
异物探测技术用于检测结构物中的异物。
该技术通常利用金属探测器或地质雷达识别结构物内部的金属或非金属异物。
异物探测技术在核电站、港口和海洋工程等领域中用于检测管道和其他容器内的异物,并通过分析识别异物的类型和大小,评估结构物的健康状况。
物理崩塌检测技术用于检测结构物是否发生物理崩塌。
该技术主要有地震抗震技术、激光散射技术和电磁感应技术等。
地震抗震技术通过检测结构物表面的振动来判断其是否发生崩塌。
激光散射技术通过测量激光在结构物表面的散射来评估结构物的表面状况。
电磁感应技术则是通过检测结构物表面电磁信号的变化来识别物理崩塌。
工程结构物水下检测技术在船舶、海洋工程、水利工程、核电站和港口等领域中具有广泛的应用。
在船舶方面,水下检测技术可以用于定位沉船、检测油船泄漏等。
在海洋工程中,水下检测技术可以用于检测海底管线、寻找潜水员等。
多波束声呐和侧扫声呐数据融合方法研究综述摘要:多波束声纳系统和扫描声纳系统是海底探测的重要工具。
两者都采用声学方法,在工作原理上有异同。
本文的数据处理进行了比较分析,多波束声纳侧重于测量精度的数据处理方法,侧扫声纳主要集中在图像处理,从数据采集到数据融合方法的原理进行了深入分析,发现即使某种处理,收集并不是一个简单的平面形象,所以的数据融合是有一定难度。
关键词:多波束声呐;侧扫声呐;数据融合1引言海洋在地球上占据了71%的区域,其中包含丰富的矿产资源和生物资源,近年来,随着海洋开发活动的需求逐渐增加,电子产品的发展,计算机和其他技术成果,多波束声纳(MBES)和侧扫描声纳(SSS)和其他水下探测技术逐步提高,底部的海洋工程,已广泛应用于矿产资源调查,通过分析表面特征可以研究复杂地质和海洋水下核研究,并通过进一步分析,反射和散射信号可以用于海底沉积物分类、水下栖息地在这项研究中,都是使用声学方法,通过潜艇发射接收声波的测绘,但重点是不同的,在处理方法上存在较大差异。
本文分别对数据处理等进行了梳理,对归纳总结和融合方法进行了分析,从注册的各方面进行分析,以便以后的数据处理和融合方法可供参考。
2数据处理2.1多波束声纳处理传统多波束数据处理包括数据格式转换和阅读声速剖面数据处理、定位、数据处理、数据处理、潮流立场深度数据处理,数据处理,和网格坐标系统转换,等等。
随着现代科学技术的支持,多波束声纳系统在原深度在这个过程中,不仅可以实现速度改正,而且还有效的计算波束脚印和测深数据滤波处理,将覆盖的噪声和虚假信号。
2.2扫描声呐图像处理技术作为潜艇开发的重要基础装备,扫描声纳可以实现水下高分辨率成像,直接影响海底探测的科学性和有效性。
扫描声呐数据处理主要包括降噪和坡度校正两个方面。
距离成像、侧扫描声纳工作当传感器高从海底和系统范围可达1:10的比例,所以目标中的形象有严重的节略,褶皱的面具和顶点位移的几何失真,更基于声线跟踪法用于消除直线距离函数;侧扫声纳系统的回声在一段时间内是水下声波的矢量,它包含了各种噪声,会使声波被误判。
多波束和侧扫声纳系统在海底目标探测中的应用摘要:随着我国海洋资源的日益开发,海底目标的探测变得尤为重要。
本文介绍了多波束和侧扫声纳系统在海底目标探测中的应用,主要包括测量原理、系统组成和关键技术。
以南海某海域为例,采用多波束系统探测了海底目标的几何形态、面积、体积、深度等信息,并用侧扫声纳系统获取了目标的声学图像,对两种方式获取的数据进行了比较分析,探讨了多波束和侧扫声纳系统在海底目标探测中的优缺点。
结果表明:侧扫声纳系统更适合于海底目标探测,但侧扫声纳系统在浅海环境下的探测深度和分辨率远不及多波束系统;多波束声呐系统可以对海底目标进行三维立体成像,但存在一定的测量盲区。
关键词:多波束;侧扫声纳;数据处理;海底目标引言:多波束和侧扫声纳系统作为目前最常用的声呐设备,具有探测精度高、工作效率高、探测范围广、可多方位同时探测等优点,已广泛应用于海洋调查、海洋测绘、海洋环境监测等领域。
根据测量目的不同,多波束系统主要分为全波束声呐和侧扫声呐两类。
侧扫声呐系统工作时由侧扫声纳探头从海底发射声波,到达海底后通过换能器接收声波信号,并通过图像处理方法得到海底目标的三维成像信息。
全波束声呐系统则可以同时探测多个目标。
一、海底目标探测方法在水下目标探测中,通常使用换能器、多波束和侧扫声纳等设备,其中多波束声纳可同时探测多个目标,它通过发射和接收多个波束信号进行数据采集,并对目标进行三维成像。
侧扫声纳是利用海底的回波信号进行目标探测,它能实现对海底地形地貌的高分辨率和高精度探测。
在实际工程中,根据海底目标的特点,通常会采用多种方法综合应用于海底目标探测。
先用侧扫声纳对海底区域进行扫描测量,然后利用多波束声纳系统获取多个波束的三维数据。
数据处理后得到的数据文件包括原始数据文件、高精度航迹文件、坐标系文件和测深图像文件等。
在实际工程中,通常利用多波束系统获取某一区域的多个波束数据点,然后通过计算机软件处理得到海底地形地貌和海底目标的三维图像。
多波束与侧扫声呐在水下探测中的应用李英超1 朱俊尧2发布时间:2023-06-18T03:45:26.497Z 来源:《科技新时代》2023年7期作者:李英超1 朱俊尧2 [导读] 近年来,我国很多水下探测人员为了提高探测结果的准确性,逐渐在工作中应用多波束与侧扫声呐。
基于此,本文主要概述了多波束测深系统和侧扫声呐系统,而且分析了多波束与侧扫声呐在水下探测中的应用案例,希望可以为有需要的人提供参考意见。
1.身份证号码:37108219811221xxxx;2.身份证号码:37028119880823xxxx摘要:近年来,我国很多水下探测人员为了提高探测结果的准确性,逐渐在工作中应用多波束与侧扫声呐。
基于此,本文主要概述了多波束测深系统和侧扫声呐系统,而且分析了多波束与侧扫声呐在水下探测中的应用案例,希望可以为有需要的人提供参考意见。
关键词:多波束;侧扫声呐;水下探测对于水资源开发利用而言,水下障碍物探测是重要的基础,其可以运用先进的探测技术,准确测量水下地形及障碍物,如此一来,除了可以保证水域船舶安全通行,也能科学指导水下救援工作的进行。
在现阶段的水下探测中,经常采用的探测方法有两种,一种是多波束,另一种是侧扫声呐。
从根本上来看,这些障碍物探测手段都是条带式扫海系统,其可以扫测整个水底地形。
然而在扫测过程中,不管是多波束还是侧扫声呐,都有着不同的工作原理以及方法,此文将某个水库救援-测试项目作为例子,科学分析多波束和侧扫声呐的应用要点和应用效果。
一、多波束测深系统和侧扫声呐系统的概述(一)多波束测深系统当前,在水下测深中普遍应用多波束探测系统。
就设备结构单元来讲,通常其包含多个单元,比如:测深设备以及定位设备等等。
其中,该系统的数据分辨率容易受到很多因素影响,最为主要的是探测设备多波束换能器。
对于系统而言,差分GNSS接收机属于定位装置,在障碍物定位测量过程中其起到控制测量的重要作用。
在多波束测深过程中,利用罗经运动传感器可以迅速测量航向数据,而且对船实时姿态准确测量。
侧扫声呐测量技术要求
侧扫声呐测量技术需要满足以下要求:
1. 高精度:侧扫声呐需要能够提供高精度的测量结果,测量误差应小于一定范围,以满足不同应用的精度要求。
2. 高分辨率:侧扫声呐需要能够提供高分辨率的海底地形信息,以便对复杂的海底地形进行精确地定位和识别。
3. 可靠性:侧扫声呐需要具备高度可靠性,能够在恶劣海况下正常工作,而且需要能够顺利完成长时间的海洋测量任务。
4. 实时性:侧扫声呐需要具备较高的实时性,能够实时反馈海底地形信息,在实时监测、海底勘探和紧急救援等领域有重要应用。
5. 灵敏度:侧扫声呐需要具备高灵敏度,能够检测到低反射率的海底物体,如浅海地形、障碍物等。
6. 易于安装和操作:侧扫声呐需要具备方便安装和操作的特点,以便在各种环境条件下快速启动和使用。
第36卷第2期2017年6月海岸工程COASTAL ENGINEERINGVol.36 No.2June,2017侧扫声呐探测原理及其在海管悬空治理检测中的应用安永宁1,2(1.交通运输部天津水运工程科学研究所,天津300456;2.天津市水运工程测绘技术重点实验室,天津300456)收稿日期:2017-02-13资助项目:国家重点研发计划项目———基于多源观测数据联合反演的海啸预警技术研究及应用(2016YFC1401506);国家自然科学基金项目———南海北部陆坡白云深水区海底斜坡失稳的发育特征及主控因素研究(41306057)作者简介:安永宁(1981-),男,高级工程师,硕士,主要从事海洋工程调查评估方面研究.E-mail:tksayn@qq.com(王 燕 编辑)摘 要:根据悬空海底管线治理后的水下结构特点,主要可分为非透空式和透空式两类,其在侧扫声呐探测图像上有着各自不同的反射特征,据此原理可采用侧扫声呐探测方法进行悬空海管治理效果的检测与评估。
通过对实际工程中不同治理方式下悬空海管的声呐探测图谱进行总结与分析,揭示了采用侧扫声呐进行悬空海管治理检测的声学解译方法及应用效果。
悬空海管在治理前,管线下方与海底面之间的空隙反映到声呐图谱上,表现为管线强反射与声学阴影区之间存在海底面透空反射。
如果采用“拋填砂袋结合覆盖层”等非透空式方法治理,由于空隙被填充,声呐图谱上的透空反射会消失,且管线强反射图像会粗化,呈现颗粒状;如果采用“水下短桩支撑”等透空式方法治理,在声呐图谱上只是增加了水下短桩的反射特征,而声学透空反射仍然存在。
关键词:侧扫声呐;海底管线;悬空;拋填砂袋;水下短桩中图分类号:P229.5 文献标识码:A 文章编号:1002-3682(2017)02-0058-05doi:10.3969/j.issn.1002-3682.2017.02.007海底管线是海上油气田的生命线,其运行状况直接关系到海上油气田的安全。
Edgetech 4200FS侧扫声纳简明操作手册美国劳雷工业有限公司2005,6Edgetech 4200FS 侧扫声呐简明操作手册一、系统组成Edgetech 4200FS 测扫声呐系统由以下部分组成:1.4200FS 拖鱼2.4200FS甲板处理器3.拖缆及磁力仪拖曳电缆4.G882磁力探头4200FS甲板处理器4200FS拖鱼4200FS拖鱼和G882磁力仪二、Edgetech 4200FS测扫声呐系统操作步骤(一)系统连接及启动1.打开包装箱,取出甲板单元处理器及显示器,将处理器及显示器安放在平稳的地方;2.连接处理器、显示器、轨迹球(鼠标)、键盘;3.打开4200FS拖鱼包装箱,将拖鱼轻轻放在垫有塑料泡沫的平地上;4.取出拖鱼的两片尾翼(共有4片,2片为备用),呈十字交叉互相插入;用厂家提供的内六角螺丝起子松开4200FS拖鱼尾部的尾翼固定螺丝,将呈十字交叉的2片尾翼插入拖鱼尾部的十字槽中,尾翼到位后,将固定螺丝拧紧,注意不要死拧,感觉一般拉力不会使尾翼脱落就行了。
这样,当尾翼在拖曳中被渔网等海底鄣碍物挂住时,尾翼会脱落从而保证拖鱼能安全拉出水面。
5.将拖缆的航空插头端插入甲板处理器后面的Sea Cable接头(见下图)。
拖缆插头8针脚插头磁力仪9m缆6针脚插头6.将拖缆的另一端插入拖鱼的防水接头中。
如果侧扫声呐和磁力仪要同时拖曳使用,应使用带“Y”型接头的拖缆。
“Y”型缆的一端(6针脚)插入4200FS拖鱼中,另一端(8针脚)插入磁力仪的9m拖缆中,磁力仪9m缆的另一端插入G882磁力仪的防水接头中(见上图)。
7.用卸扣将主拖缆的承重扣和拖鱼的拖曳孔相连,若磁力仪和侧扫同时使用,则将磁力仪的9m缆的拖曳终端固定在4200FS拖鱼的拖把中(见下图)。
8.检查处理器、显示器的适应电源是否是220VAC;9.将甲板处理器(PC工业计算机)前面的电源开关开启,Edgetech 4200FS的系统软件Discover 将自动启动,并进入其界面;10.将甲板单元前面的“Towfish”电源开关开启,等待 1.5-2分钟,当Discover 软件底部的“NET OFF”变为“NET ON”时,系统就准备好了。
海洋侧扫声呐探测技术的现状及发展摘要:侧扫声纳是海洋地形地貌测量的必备仪器之一。
侧扫声呐是利用回声测深原理探测海底地貌和水下物体的设备,目前广泛应用于海洋地形调查以及探测海底礁石、沉船、管道、电缆以及各种水下目标等。
本文从侧扫声呐技术的现状进行分析,对未来侧扫声呐探测技术的发展趋势进行总结,为后续进行海洋侧扫声呐探测技术的研究打下基础。
关键词:侧扫声呐;海洋探测;海洋资源海底地形地貌作为了解和认识海洋的基本信息,在海洋资源开发、海洋工程建设和海洋权益维护等方面具有重要意义。
海底信息的探测是进行海底科学研究的基础,是了解海洋空间形态特征的基础资料。
由于声波在水中传播的独特优势,目前海底信息的快速获取主要依赖于声学探测设备,主要包括单波束、多波束和侧扫声纳系统。
前两种设备是通过测量海底深度反演海底地形,称之为等深线成像:侧扫声纳系统根据回波强度反映海底地形变化;相比而言,侧扫声纳探测效率和分辨率较高,可获得更清晰的目标信息,在国内外应用广泛。
一、侧扫声呐检测原理侧扫声呐技术运用海底地物对入射声波反向散射的原理来探测海底形态,它能直观地提供海底形态的声成像。
通过声呐线阵向左右两侧发射扇型波束,海底反向散射信号依时间的先后被声呐线阵接收,有一定高度的海底障碍物在侧扫声呐资料上能产生“阴影”。
通过对不同的成像条件下得到的声呐图谱中“阴影”的研究,可以判断海底管线的状态为透空还是非透空,从而评价悬空管线治理效果。
当海底管线状态为悬空时,侧向发射的声呐波束首先遇到管线形成强反射,其反射时程最短,最先成像在声呐图谱上;管线下方与海床面之间的空隙(空隙高度即为悬空高度)可允许声呐波束穿过,形成“声学透空区”,其反射时程次之,在声呐图谱上位于管线强反射外侧;管线本身会遮挡一定宽度范围的声呐波束穿过,形成“声学阴影区”,其理论反射时程最长,在声呐图谱上位于“声学透空区”外侧。
如此,悬空管线形成的声呐图谱由近及远依次为管线强反射、“声学透空区”海底面反射、“声学阴影区”空白反射(图1a)。
浅析测扫声呐在海底电缆检测中的应用摘要:海底电缆周围复杂多变的环境条件,人类海样频繁的海洋活动,对海底电缆的安全稳定运行均有可能造成危害,为了确定海底电缆本体及周围环境的变化情况,有必要对海底电缆进行相关检测,以便及时发现海底电缆的风险点及薄弱点,及时采取有效措施,杜绝事故的发生。
对应用测扫声呐系统检测海底电缆所处路由的地形地貌情况、海底电缆保护情况及周围环境状况的方式进行了分析与探讨。
关键词:海底电缆;侧扫声呐;检测;地形地貌1 引言随着海洋资源调查和海洋开发进程的加快,以及近海风电技术的发展,海底电缆的应用越来越广泛。
海底电缆周围运行环境复杂多变,海浪和洋流的冲刷、环境腐蚀、海洋生物影响以及人类海洋施工、捕捞、渔业养殖、船舶抛锚等都可能危及到海底电缆的安全[1]。
一般情况下,海底电缆施工时会采用深埋、抛石坝、铸铁套管等保护方式,以防止外力破坏。
但是负责多变的海洋环境及人类在海缆路由区域的各种活动,会使海底电缆的保护方式发生各种各样的改变,一旦海底电缆发生故障,修复施工技术难度高,价格昂贵,持续周期厂,势必会造成重大的经济损失及政治影响。
因此有必要对海底电缆进行各种各样的检测,以确定其运行环境的安全,而侧扫声呐则是一种方面、简单、成本较低的检测方式。
2 测扫声呐检测系统工作原理利用测扫声呐检测系统对海底电缆路由区域进行地形地貌检测,可以获取海底电缆路由声学影像,对影像进行分析,辨识海底电缆裸露和悬空情况,确定裸露段、悬空段的长度、对应的水深、地形地貌等,能够获取海底电缆上方石坝的外观状态,是否存在塌散或变形,能够发现海底电缆路由残存海床的锚具、锚链、缆绳须进行位置坐标检测和着床姿态检测。
测扫声呐检测时,其横切面几何关系如下图[2]所示,测扫声呐距海底高度为h,检测时波束以宽度向航行侧面发生声波能量,波束照射到内侧斜距为,照射到内侧斜距为,海底形成的测绘带宽度为,最内侧及最外侧波束夹角分别为,则可以得到如下关系:图1 测扫声呐检测几何关系示意图侧扫声呐是运用海底地物对入射声波反向散射的原理来探测海底形态,侧扫声呐技术能直观地提供海底形态的声成像,其原理图如下图2所示,侧扫声呐的基本工作原理与侧视雷达类似,侧扫声呐左右各安装一条换能器线阵,首先发射一个短促的声脉冲,声波以球面波方式向远方传播,碰到海底后反射波或反向散射波返回到换能器[3-7]。
声呐的原理声呐是一种利用声波进行定位和测距的技术,通常应用于海洋和空间等领域。
下面介绍声呐的原理和工作机制。
声波传播原理声波是一种机械波,通过物质中颗粒的振动传播。
声波在介质中传播的速度取决于介质的密度和弹性模量,因此在不同形态的介质中速度也会不同。
声波在传播过程中会受到多种因素的影响而发生变化,如距离、介质温度、压强等,因此要进行补偿。
声波的最大特点是能够通过波长和频率来分解和重构信息,从而定位目标位置。
声呐的概念与分类声呐可以看做是一种发射到水中、空气中或地下的声波信号,能得到回波来自目标的测距和定位信息。
声呐可以按照不同功能进行分类,如渔业声呐、军用声呐和专用声呐等;也可以按照传播介质的不同来分为水声、空声和地声等。
其中,水声呐是最常见的一种。
水声呐的原理水声呐的原理类似于蝙蝠的回声定位,也称为回波定位技术。
声波在水中传播时,会受到水中各种因素的影响,如水温变化、海流、海浪等,但是在相同条件下的传播速度可以通过特定的公式来计算。
具体过程如下:1.发射声波信号声呐中的发射器向水中释放声波,声波以特定的速度在水中传播。
发射信号的频率和幅度决定了声波的特性。
2.声波反射和回波接收放射出来的声波被水中的目标反射,形成回波。
回波被声呐接收器捕捉,并转化为电信号。
3.信号分析和处理接收到的电信号被转化为数字信号进行分析和处理。
具体分析方式取决于声呐本身的设计和使用目的。
4.数据处理和显示最后,数据通过图表等形式展示在声呐屏幕上。
可以得到目标位置、速度、深度等信息,从而实现目标的定位和测距。
水声呐的应用水声呐广泛应用于海洋勘探、海底地形测绘、水下作业和捕鱼等领域。
不同用途的声呐都有各自的特性,例如用于海底地形测绘的侧扫声呐,能够在水下作三维成像;而用于渔业的声呐则需要高精度的探测效果,能够在海底明确定位鱼群位置。
总之,声呐是一种重要的声学工具,通过回波定位技术实现目标定位和测距。
声呐的应用领域广泛,随着科技的发展,声呐技术也在不断更新、完善,为各种领域的观测、勘探和定位带来更多便利和精度。
海洋测绘中的测深技术分析摘要:在全球经济一体化的背景下,国际的竞争越来越激烈。
海洋测绘是一项关系到社会和经济的工作,在国民经济中起着举足轻重的作用。
近年来,随着国家经济建设的不断发展,海洋测绘日益引起人们的关注。
传统的测绘技术受到了很大的挑战,这就需要对其进行研究,并对其进行借鉴。
在此基础上,结合海洋测绘的基本理念,结合海洋测绘技术的发展,对目前在海洋测绘领域所使用的多种测绘技术进行了深入的研究,以期为我国在海洋测绘领域中所采用的测绘技术的选择与使用提供一定的参考依据。
关键词:海洋测绘;测深技术;测量精度;1.海洋测绘的概念海洋测绘,是通过对海洋水域、海底情况的调查,完成对海洋的图纸编纂等一系列工作。
该工作是一个多学科交叉的课题,具有较高的综合性,是一项十分重要的课题。
当前,海洋地形图的制图方法主要有路线测量和面积测量两种。
路线测量也叫剖面测量,是一种对海洋区域的地质构造、地球物理场等进行调查的方法。
面积测量就是按照设计图中规定的比例,在平面上画出一张测距网,从而实现对平面上物体的测量。
海洋测绘有别于陆地测绘,海洋底部覆盖着一层水体上富含各种生物和无机物,因此,海洋测绘与陆地测绘不同。
首先,目前大部分的海洋测绘工作都是在海路或空中进行的,很难在水下进行;其次,进行了珊瑚礁、海底地形、海难等方面的调查。
尽管这些地貌远比陆地测量要简单,但是难度要比陆地测绘还大。
2.海洋测绘中的测深技术分析2.1机载激光测深技术机载激光测深技术是一种有源式水深测绘系统,用来测量和测量海底地形。
它是一项将激光系统,GPS,以及导航定位结合在一起的技术。
它的使用原则就是通过回声的方向来发送和接收声波。
利用此探头,可对水下目标进行定位,并可得到水下目标的深度。
该测深仪能对回波信号进行有效的处理,能按规定的格式对回波信号进行测量,还能对水深与船的有关资料进行测量。
计算机科技的运用,主要是建立一套能即时处理的程序;数字绘图机可利用船舶的航迹,绘制出船舶的等高线,辨识海底地形,并能进行较深的剖面测量。
侧扫声呐手册——原理与应用英文版A side-scan sonar is a type of sonar system that is used to efficiently create an image of large areas of the sea floor. It is commonly used for underwater mapping and for locating objects on the ocean floor. The system works by emitting a fan-shaped beam of sound waves from the side of the vessel. These sound waves then bounce off the sea floor and are detected by the sonar receiver. By analyzing the time it takes for the sound waves to return and the intensity of the return signal, the system can create a detailed image of the sea floor.The side-scan sonar system is widely used in various applications, such as underwater archaeology, marine geology, and oceanography. In underwater archaeology, it is used to locate and map submerged cultural heritage sites, such as shipwrecks and ancient underwater structures. In marine geology, it is used to study the topography of the sea floor and to locate geological features such as fault lines and volcanic vents. In oceanography, it is used tomap the sea floor for habitat studies and to locate and study underwater ecosystems.The principles of side-scan sonar technology are based on the physics of sound propagation in water and the reflection of sound waves off different surfaces. The system consists of a transducer, which emits the sound waves, and a receiver, which detects the returning sound waves. The transducer is typically mounted on the side of a vessel and is towed behind it, allowing for efficient coverage of large areas.In conclusion, the side-scan sonar is a valuable tool for underwater exploration and mapping. Its ability to create detailed images of the sea floor has made it an essential technology for a wide range of applications, from underwater archaeology to marine geology and oceanography. Its principles are based on the physics of sound propagation and reflection, and its applications are diverse and far-reaching.。
侧扫声呐概述
侧扫声呐是由Side-Scan Sonar一词意译而来,国内也叫旁扫声呐、旁视声呐。
国外从五十年代起开始应用,到七十年代已在海洋开发等方面得到了广泛的使用,我国从七十年代开始组织研制侧扫声呐,经历了单侧悬挂式、双侧单频拖曳式、双侧双频拖曳式等发展过程。
由中科院声学所研制并定型生产的CS-1型侧扫声呐,其主要性能指标已达到了世界先进水平。
侧扫声呐有许多种类型,根据发射频率的不同,可以分为高频、中频和低频侧扫声呐;根据发射信号形式的不同,可以分为CW脉冲和调频脉冲侧扫声呐;另外,还可以划分为舷挂式和拖曳式侧扫声呐,单频和双频侧扫声呐,单波束和多波束等。
波束平面垂直于航行方向,沿航线方向束宽很窄,开角一般小于2°,以保证有较高分辨率;垂直于航线方向的束宽较宽,开角约为20°~60°,以保证一定的扫描宽度。
工作时发射出的声波投射在海底的区域呈长条形,换能器阵接收来自照射区各点的反向散射信号,经放大、处理和记录,在记录条纸上显示出海底的图像。
回波信号较强的目标图像较黑,声波照射不到的影区图像色调很淡,根据影区的长度可以估算目标的高度。
侧扫声呐的工作频率通常为几十千赫到几百千赫,声脉冲持续时间小于1毫秒,仪器的作用距离一般为300~600米,拖曳体的工作航速3~6节,最高可达16节。
侧扫声呐近程探测时仪器的分辨率很高,能发现150米远处直径 5厘米的电缆。
用于深海地质调查的远程侧扫声呐工作频率为数千赫,探测距离超过20公里。
进行快速大面积测量时,仪器使用微处理机对声速、斜距、拖曳体距海底高度等参数进行校正,得到无畸变的图象,拼接后可绘制出准确的海底地形图。
从侧扫声呐的记录图象上,能判读出泥、沙、岩石等不同底质。
利用数字信号处理技术获得的小视野放大图象能分辨目标的细节。
1 侧扫声呐基本工作原理
工作原理示意图如图1和图2所示。
左、右两条换能器具有扇形指向性。
在航线的垂直平面内开角为ΘV,水平面内开角为ΘH。
当换能器发射一个声脉冲时,可在换能器左右侧照射一窄梯形海底,如图左侧为梯形ABCD,可看出梯形的近
换能器底边AB小于远换能器底边CD。
当声脉冲发出之后,声波以球面波方式向远方传播,碰到海底后反射波或反向散射波沿原路线返回到换能器,距离近的回波先到达换能器,距离远的回波后到达换能器,一般情况下,正下方海底的回波先返回,倾斜方向的回波后到达。
这样,发出一个很窄的脉冲之后,收到的回波是一个时间很长的脉冲串。
硬的、粗糙的、突起的海底回波强,软的、平坦的、下凹的海底回波弱。
被突起海底遮挡部分的海底没有回波,这一部分叫声影区。
这样回波脉冲串各处的幅度就大小不一,回波幅度的高低就包含了海底起伏软硬的信息。
一次发射可获得换能器两侧一窄条海底的信息,设备显示成一条线。
在工作船向前航行,设备按一定时间间隔进行发射/接收操作,设备将每次接收到的一线线数据显示出来,就得到了二维海底地形地貌的声图。
声图以不同颜色(伪彩色)或不同的黑白程度表示海底的特征,操作人员就可以知道海底的地形地貌。
图一
图二
2 侧扫声呐主要性能指标
侧扫声呐的主要性能指标包括工作频率、最大作用距离、波束开角、脉冲宽度及分辨率等,这些指标都不是独立的,它们之间相互都有联系。
侧扫声呐的工作频率基本上决定了最大作用距离,在相同的工作频率情况下,最大作用距离越远,其一次扫测覆盖的范围就越大,扫测的效率就越高。
脉冲宽度直接影响了分辨率,一般来说,宽度越小,其距离分辩率就越高。
水平波束开角直接影响水平分辨率,垂直波束开角影响侧扫声呐的覆盖宽度,开角越大,覆盖范围就越大,在声呐正下放的盲区就越小。
只要了解了这些指标,侧扫声呐的性能就大致知道了。
3 侧扫声呐基本系统组成和功能
侧扫声呐基本系统的组成一般包括工作站、绞车、拖鱼、热敏记录器或打印机(可选件)、GPS接收机(可选件)及其它外部设备等。
3.1 工作站
工作站是侧扫声呐的核心,它控制整个系统的工作,具有数据接收、采集、处理、显示、存储及图形镶嵌、图象处理等功能。
它由硬件和软件两部分组成,硬件主要包括一台高性能的主计算机及接收机,软件包括系统软件和应用软件。
3.2 绞车与拖曳电缆
绞车是侧扫声呐必不可少的设备,由绞车和吊杆两部分组成,其主要的作用是对拖鱼进行拖曳操作。
绞车有电动、手动和液压等几种型号,它们各有利弊,可以根据实际的使用环境来选择。
一般在浅海小船作业时,可以选择手动绞车,体积小,质量轻,搬运比较方便,而且不需要电源。
在深海大船使用时,可以选择电动或液压的绞车,液压绞车收放比较方便,但价格一般都比较贵,电动绞车在性能价格比上有一定的优势。
拖曳电缆安装在绞车上,其一头与绞车上的滑环相连,另一头与侧扫声呐的鱼体相连。
拖缆有两个作用,第一是对拖鱼进行拖曳操作,保证拖鱼在拖曳状态下的安全;第二是通过电缆传递信号。
拖缆有两种类型,强度增强的多芯轻型电缆和铠装电缆。
沿岸比较浅的海区,一般使用轻型电缆,其长度从几十米到一百多米左右。
轻型电缆便于甲板上的操作,可由一个人搬动。
其负荷一般在400-1000 Kg之间,取决于内部增强芯
的尺寸。
铠装电缆用于较深的海区,大部分侧扫声呐铠装电缆是“力矩平衡”的“双层铠装”,这意味着铠装电缆具有两层反方向螺旋绕成的金属套,铠装层可以水密,也可以不水密,由铠装的材料来决定。
不管铠装层水不水密,导线还得由绝缘层来水密。
3.3 拖鱼
侧扫声呐的拖鱼是一个流线型稳定拖曳体,它由鱼前部和鱼后部组成。
鱼前部由鱼头、换能器舱和拖曳钩等部分组成;鱼后部由电子舱、鱼尾、尾翼等部分组成。
尾翼用来稳定拖鱼,当它被鱼网或障碍物挂住时可脱离鱼体,收回鱼体后可重新安装尾翼。
拖曳钩用于连接拖缆和鱼体的机械连接和电连接。
根据不同的航速和拖缆长度,把拖鱼放置在最佳工作深度。
3.4 GPS接收机
GPS接收机是侧扫声呐的外部设备,主要是为侧扫声呐数据提供定位数据,用户可以根据需要,配置不同型号和不同功能的GPS,系统留有标准接口,可以方便地与有NMEA-0183标准接口的定位设备连接。
4 应用特点编辑
1、STARFISH侧扫声纳在海底调查领域的最新发展英国Tritech公司宣布推
出全新高性能侧扫声纳系统StarFish 450H。
高性价比、高效能、船体固定式侧扫声纳系统为你呈现出壮观的海底图像。
StarFish 450H系统采用了超薄设计,灵活安装固定支架使其可以固定在任何船只底部,在任何航行过程中都可随时观察有趣的海底目标。
2、换能器安装在船底,使用5m(16ft)或20m(65ft)拖拽电缆航速2—5
节声纳测量范围100m(320ft)显示海底微小目标(如电缆或锚链)可测量微小到2.5cm(1”)的物体船体固定式侧扫声纳操作非常安全简便,无须担心在浅水或急流区域应用时拖缆被刮坏或绞断的发生。
3、系统简单易操作是满足任何想捕获海底图像完成对海底勘察工作者的理
想工具。
利用先进的数字CHIRP声学技术结合水下调查行业的专业经验,StarFish 450H侧扫声纳可以在不牺牲图像质量的情况下在更长的作业区域进行海底目标物扫描。
4、StarFish 450H固定式侧扫声纳即插即用,通过USB接口与您的PC机连接。
简单的一次性安装到船只上,你即刻具有在每次航行中时时捕获海底数字图像的能力。
StarFish 450H操作简单,软件界面友好让海底图像轻松清晰呈现。