计算机辅助-ADAMS应用-齿轮传动动力学
- 格式:docx
- 大小:222.35 KB
- 文档页数:8
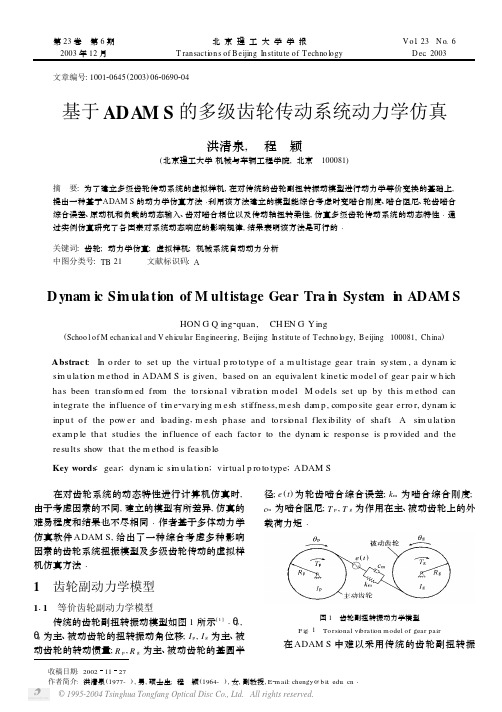
第23卷 第6期2003年12月北京理工大学学报T ran sacti on s of Beijing In stitu te of T echno logyV o l .23 N o.6D ec .2003 文章编号:100120645(2003)0620690204基于ADAM S 的多级齿轮传动系统动力学仿真洪清泉, 程 颖(北京理工大学机械与车辆工程学院,北京 100081)摘 要:为了建立多级齿轮传动系统的虚拟样机,在对传统的齿轮副扭转振动模型进行动力学等价变换的基础上,提出一种基于ADAM S 的动力学仿真方法Ζ利用该方法建立的模型能综合考虑时变啮合刚度、啮合阻尼、轮齿啮合综合误差、原动机和负载的动态输入、齿对啮合相位以及传动轴扭转柔性,仿真多级齿轮传动系统的动态特性Ζ通过实例仿真研究了各因素对系统动态响应的影响规律,结果表明该方法是可行的Ζ关键词:齿轮;动力学仿真;虚拟样机;机械系统自动动力分析中图分类号:TB 21 文献标识码:AD ynam ic Si m ulation of M ultistage Gear Tra i n System i n ADAM SHON G Q ing 2quan , CH EN G Y ing(Schoo l of M echan ical and V eh icu lar Engineering ,Beijing In stitu te of T echno logy ,Beijing 100081,Ch ina )Abstract :In o rder to set up the virtual p ro to typ e of a m u ltistage gear train system ,a dynam ic si m u lati on m ethod in ADAM S is given ,based on an equ ivalen t k inetic m odel of gear p air w h ich has been tran sfo rm ed from the to rsi onal vib rati on m odel.M odels set up by th is m ethod can in tegrate the influence of ti m e 2varying m esh stiffness ,m esh dam p ,com po site gear erro r ,dynam ic inp u t of the pow er and loading ,m esh p hase and to rsi onal flex ib ility of shaft .A si m u lati on exam p le that studies the influence of each facto r to the dynam ic respon se is p rovided and the resu lts show that the m ethod is feasib le .Key words :gear ;dynam ic si m u lati on ;virtual p ro to typ e ;ADAM S收稿日期:20021127作者简介:洪清泉(1977-),男,硕士生;程 颖(1964-),女,副教授,E 2m ail:chengy@bit .edu .cn Ζ 在对齿轮系统的动态特性进行计算机仿真时,由于考虑因素的不同,建立的模型有所差异,仿真的难易程度和结果也不尽相同Ζ作者基于多体动力学仿真软件ADAM S ,给出了一种综合考虑多种影响因素的齿轮系统扭振模型及多级齿轮传动的虚拟样机仿真方法Ζ1 齿轮副动力学模型111 等价齿轮副动力学模型传统的齿轮副扭转振动模型如图1所示[1]ΖΗp ,Ηg 为主、被动齿轮的扭转振动角位移;I p ,I g 为主、被动齿轮的转动惯量;R p ,R g 为主、被动齿轮的基圆半径;e (t )为轮齿啮合综合误差;k m 为啮合综合刚度;c m 为啮合阻尼;T p ,T g 为作用在主、被动齿轮上的外载荷力矩Ζ图1 齿轮副扭转振动力学模型F ig .1 To rsi onal vibrati on model of gear pair在ADAM S 中难以采用传统的齿轮副扭转振动模型描述轮齿啮合传动过程,为此对该模型进行如下变换:添加一无质量刚性辅助齿轮,辅助齿轮与主动齿轮组成一虚拟齿轮运动副;被动齿轮不再与主动齿轮啮合,而是通过扭簧与辅助齿轮连接Ζ工作时,动力由主动齿轮通过虚拟齿轮副传递给辅助齿轮,再通过扭簧传递给被动齿轮Ζ变换后的齿轮副动力学模型如图2所示,Η为辅助齿轮的角位移;R ′p ,R ′g 为主、被动齿轮啮合节圆半径;k ′m 为等价扭簧刚度;c ′m 为等价扭簧阻尼;e ′(t )为轮齿啮合综合误差的等价扭簧初始角位移变动量;T 1为虚拟齿轮运动副对主动齿轮的反作用力矩,T 2为虚拟齿轮运动副传递给辅助齿轮的力矩,即等价扭簧传递的力矩Ζ图2 等价齿轮副动力学模型F ig .2 A n equivalent k inetic model of gear pair112 在ADAM S 中的实现方法等价齿轮副动力学模型可以在ADAM S 中实现Ζ辅助齿轮通过定义一密度足够小的齿轮代替;虚拟齿轮运动副直接采用ADAM S 中的齿轮运动副;扭簧通过定义力矩实现,该力矩作用于被动齿轮,反作用于辅助齿轮,其大小由辅助齿轮和被动齿轮之间转角、转速、等价扭簧刚度、等价扭簧阻尼、等价扭簧初始角位移变动量和初始角速度变动量决定Ζ113 参数变换与计算根据两种齿轮副变换前后轮齿动态啮合力对主、被动齿轮的作用力矩等价的原则,即可确定出两种齿轮副模型之间的动力学参数变换关系Ζ①等价扭簧刚度 k ′m =k m R 2g ,式中 k m 为轮齿啮合综合刚度Ζ②等价扭簧阻尼 c ′m =c m R 2g ,式中 c m 为轮齿啮合阻尼Ζ③等价扭簧初始角位移变动量 e ′j =e j R g ,式中 e j 为轮齿啮合综合误差,一般只考虑齿轮误差Ζ常见的处理方法是根据齿轮设计的精度等级确定齿轮偏差,采用以时间为变量的简谐函数表示法进行误差模拟[2]Ζ若改用以齿轮转角为变量的简谐函数表示,则可使齿对处于相同啮合位置时具有相同的轮齿啮合综合误差Ζe j (Υj )=e j0+e jr sinm od (Υj z j )+∆j360 z j 2Π,式中 e j0为齿轮误差的常值;e jr 为齿轮误差的幅值,根据齿轮的公差值确定;Υj 为齿轮转角;z j 为齿数;∆j 为啮合初始位置Ζ2 多级齿轮传动系统动力学模型对于多级齿轮传动系统,除了齿轮副啮合问题,还必须考虑不同啮合齿对动力学参数的相位差、传动轴柔性、原动机和负载的动态特性Ζ211 齿对啮合相位的确定目前齿轮系统仿真的啮合相位计算仅限于较简单的情况:如行星轮系和中心在同一条直线上的齿轮传动[3,4]Ζ为此,作者对通用的多级齿轮传动相位计算方法进行了推导,参见图3Ζ(a )啮合齿数发生变化的角度位置(b )齿对初始啮合角度位置图3 啮合相位计算F ig .3 Calculati on of m esh phase196 第6期洪清泉等:基于ADAM S 的多级齿轮传动系统动力学仿真 在计算出任一啮合齿对的啮合齿数发生变化(单齿啮合与双齿啮合的过渡)时的齿轮角度位置∆j1和∆j2,齿对正确啮合的初始角度位置∆j 后[5],通过∆j 与∆j1,∆j2的关系确定该齿对的啮合相位Ζ212 传动轴柔性效应采用有限段的方法考虑传动轴的柔性效应[6],其基本思想是把柔性体描述为多个由弹簧和阻尼器为结点连接的刚体组成的多刚体系统Ζ在本模型中,传动轴的柔性效应是通过两端点的扭转总体效应加以考虑的Ζ213 原动机和负载原动机和负载的具体模型比较复杂,将其简化为作用在输入齿轮和输出齿轮上的转矩或转速,采用ADAM S 实时函数直接模拟[7,8]Ζ3 实例仿真基于ADAM S 的多级齿轮传动仿真模型如图4,采用GST IFF 积分器求解,时间步长011m sΖ图4 多级齿轮传动虚拟样机模型F ig .4 V irtual p ro to type of m ultistage gear train311 内部激励对动态响应的影响系统的外部激励为常值(齿轮1的输入转速为500r m in ,齿轮5输出转矩1000N m ),在不同内部激励作用下,齿轮3的扭振角加速度如图5所示Ζ图5中,曲线1是刚性传动轴,不考虑啮合相位,时变啮合综合刚度单独激励下齿轮3的扭转振动角加速度,曲线2,3,4,5分别为考虑齿轮3轮齿啮合阻尼、轮齿啮合综合误差、不同啮合相位、传动轴扭转柔性后齿轮3的扭转振动角加速度Ζ可见,啮合阻尼可有效减小系统的振动,轮齿啮合综合误差显著增大系统的振动,但都不改变动态响应的相位和频率;不同啮合相位影响了齿对的刚度突变时刻,使系统的时变啮合刚度激励总体效应发生变化,对系统动态响应的影响视具体情况而定;传动轴柔度对系统动态响应的相位、幅值、频率都有影响Ζ(a )啮合阻尼对动态响应的影响(b )轮齿啮合综合误差对动态响应的影响(c )啮合相位对动态响应的影响(d )传动轴扭转柔度对动态响应的影响图5 不同内部激励对系统动态响应的影响F ig .5 Influence of different inner excitati onon the dynam ic response312 外部激励对动态响应的影响系统内部激励只考虑时变啮合综合刚度,在外部激励动态作用下,齿轮3的扭振角加速度如图6所示Ζ图6a 为齿轮1输入转速为470~530r m in ,按正弦规律每转过1周波动一次时齿轮3的扭转振动角加速度变化Ζ可见,动态响应明显受输入转速波动的影响Ζ296北京理工大学学报第23卷 图6b 为作用在齿轮5上的负载转矩,按正弦规律在500~1500N m 之间每转过1周波动一次时齿轮3的扭转振动角加速度变化Ζ可见,负载转矩对动态响应的影响类似于调制作用Ζ(a )输入转速波动下的动态响应(b )负载转矩波动下的动态响应图6 外部激励对系统动态响应的影响F ig .6 Influence of different outer excitati onon the dynam ic response4 结 论实例仿真结果与文献[1]中的理论分析是一致的Ζ验证了给出的基于ADAM S 的多级齿轮传动系统的动力学仿真方法是正确的Ζ同时,用该方法可考虑多种激励的影响,直接建立系统虚拟样机模型Ζ参考文献:[1] 李润方,王建军.齿轮系统动力学[M ].北京:科学出版社,1997.L i R unfang ,W ang J ian jun .D ynam ics of gear system[J ].Beijing :Science P ress ,1997.(in Ch inese )[2] 李润方,陶泽光,林腾蛟等.齿轮啮合内部动态激励数值模拟[J ].机械传动,2001,25(2):1-3.L i R unfang ,T ao Zeguang ,L in T engjiao ,et al .N um erical si m u lati on fo r inner dynam ic excitati on of gearing [J ].M echan ical T ran s m issi on ,2001,25(2):1-3.(in Ch inese )[3] 孙智民,沈允文,李素有.封闭行星齿轮传动系统的扭振特性研究[J ].航空动力学报,2001,16(2):163-166.Sun Zh i m in ,Shen Yunw en ,L i Suyou .A study on to rsi onal vib rati on s in an encased differen tial geartrain [J ].Jou rnal of A ero space Pow er ,2001,16(2):163-166.(in Ch inese )[4] 张锁怀,石守红,丘大谋.齿轮耦合的转子轴承系统的非线性模型[J ].机械科学与技术,2001,20(2):191-193.Zhang Suohuai ,Sh i Shouhong ,Q iu D amou .Anon linear model fo r dynam ic analysis of a geared ro to r 2bearing system [J ].M echan ical Science and T echno logy ,2001,20(2):191-193.(in Ch inese )[5] 朱景梓,张展,秦立高.渐开线外啮合圆柱齿轮传动[M ].北京:国防工业出版社,1990.Zhu J ingzi ,Zhang Zhan ,Q in L igao .T he invo lu tecylindrical gear tran s m issi on by ou ter m esh [M ].Beijing :N ati onal D efence Indu stry P ress ,1990.(in Ch inese )[6] 康新中,吴三灵,马春茂.火炮系统动力学[M ].北京:国防工业出版社,1999.Kang X inzhong ,W u San ling ,M a Chunm ao .Gunsystem dynam ics [M ].Beijing :N ati onal D efenceIndu stry P ress ,1999.(in Ch inese )[7] M echan ical D ynam ics Inc .ADAM S so lver u ser’sgu ide [M ].[s .l.]:M echn ical D ynam ics Inc .,2002.[8] M echan ical D ynam ics Inc .ADAM S view u ser’s gu ide[M ].[s .l .]:M echn ical D ynam ics Inc .,2002.396 第6期洪清泉等:基于ADAM S 的多级齿轮传动系统动力学仿真。
基于ADAMS的齿轮传动系统可靠性研究郭术义,杨 杰(华北水利水电学院,郑州 450011)摘要:利用Pr o/Engineer完成齿轮三维虚拟造型,运用ADAMS软件对三维造型进行虚拟装配、动力学仿真分析,借助于ANASYS软件实现了对齿轮的可靠性寿命研究。
计算结果略高于试验结果。
本方法对研究齿轮可靠性提供了新的途径。
关键词:ADAM S软件;齿轮;可靠性中图分类号:TH132.41 文献标识码:A 文章编号:1006-0006(2007)06-0050-02Gear Transm issi on Reliability Study Based on ADAMSG UO S hu2yi,YAN G J ie(North China University of W ater Conservancy and Electric Power,Zhengzhou450011,China)Ab s tra c t:The traditi onal gear reliability experi m ents have been gotten in the way of the reliability devel opment.The gear three2di m ensi onal virtual modeling was accomp lished by Pr o/Engineer.The virtual asse mbly and dyna m ics e mulate analysis was finished by ADAMS s oft w are.The gear reliability life study was carried out by ANASYS s oft w are.The computing results are larger than the results fr om the experi m ents.This method p r ovides a new way t o study gear reliability.Key wo rd s:ADAM S s oft w are;Gear;Reliability1 前言传统齿轮传动系统的可靠性设计主要通过齿轮可靠性试验[1]获得齿轮的弯曲疲劳寿命和强度等概率统计分布规律,如研究采用新材料的齿轮的可靠性,必须进行齿轮的全寿命试验,这就需要选择大量高精度齿轮样本进行试验,并浪费大量工作时间进行概率分布统计规律分析。

主题ADAMS/Driveline在汽车传动系统及整车动力学分析中的应用用途Adams/Driveline提供给工程师和分析专家进行传动系统部件建模和仿真的专用工具,可以用来研究整个传动系在各种不同的工作条件下的动力学性能。
利用Adams/Driveline模块,可以快速创建完整的、参数化的传动系统,如变速器、分动器、驱动轴、和差速器的模型,利用该模块建立包含传动系统的功能化数字样机可集成到Adams/Car中研究整车(如前轮驱动、后轮驱动以及全轮驱动)的动力学性能分析。
软件信息ADAMS/Driveline内容介绍●Adams/Driveline的功能概述●Adams/Driveline的传动系统建模介绍●Adams/Driveline的整车装配及各工况分析●总结QA 20130722一、Adams/Driveline的功能概述MSC Adams/Driveline提供给工程师和分析专家进行传动系统部件建模和仿真的专用工具,可以用来研究整个传动系在各种不同的工作条件下的动力学性能。
利用MSC Adams/Driveline模块,可以快速创建完整的、参数化的传动系统,利用该模块建立包含传动系统的功能化数字样机可集成到MSC Adams/Car中分析研究整车(如前轮驱动、后轮驱动以及全轮驱动)的动力学性能分析。
带详细传动系统的整车模型后轮驱动模型及台架试验台传动系模块提供了应用范围很广的强有力的工具。
支持操稳分析中的前轮驱动,后轮驱动及四轮驱动,力矩转移、分配、陀螺效应和平衡效应、轴承动力学和弹性、以及部件级的噪声和振动激励。
用户只需输入参数,差速器、驱动轴、分动器和变速器的模型将自动创建。
齿轮力、自由行程、粘性联轴器和防滑差速器则来自于详尽的单元库。
部件可以很容易地激活或失效以研究其对整个系统行为的影响。
同时提供了丰富的标准试验,用户也可以高效地创建自己的试验。
变速箱及差速器总成模型二、Adams/Driveline的传动系统建模介绍➢Engine及Flywheel建模发动机体、曲轴、飞轮以带有质量、惯量的part代替,可以带入详细的CAD几何渲染,发动机与车架通过bushing衬套,柔性连接。

齿轮传动系统的动力学仿真分析摘要:本文对建立好的整体机械系统的虚拟样机模型进行运动学和动力学的仿真分析,通过仿真分析,可以方便地得出齿轮传动系统在特定负载和特定工况下的转矩,速度,加速度,接触力等,仿真分析后,可以确定各个齿轮之间传递的力和力矩,为零件的有限元分析提供基础。
关键词:传动系统动力学仿真 adams 虚拟样机中图分类号:th132 文献标识码:a 文章编号:1007-9416(2011)12-0207-01随着计算机图形学技术的迅速发展,系统仿真方法论和计算机仿真软件设计技术在交互性、生动性、直观性等方面取得了较大进展,它是以计算机和仿真系统软件为工具,对现实系统或未来系统进行动态实验仿真研究的理论和方法。
运动学仿真就是对已经添加了拓扑关系的运动系统,定义其驱动方式和驱动参数的数值,分析其系统其他零部件在驱动条件下的运动参数,如速度,加速度,角速度,角加速度等。
对仿真结果进行分析的基础上,验证所建立模型的正确性,并得出结论。
本文中所用的动力学仿真软件是adams软件。
adams软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格郎日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
adams软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。
虚拟样机就是在adams软件中建的样机模型。
1、运动参数的设置先在造型软件ug中将齿轮传动系统造型好,如下图所示。
在已经设置好运动副的齿轮传动系统的第一级齿轮轴上绕地的旋转副上给传动系统添加一个角速度驱动。
然后进行仿真。
在进行仿真的过程中,单位时间内仿真步数越多,步长越短,越能真实反映系统的真实结果,但缺点是仿真时间也随之变长,占用的系统空间也就越大。
所以应该在兼顾仿真真实性与所需物理资源和仿真时间的基础上,选择一个合适的仿真时间和仿真的步长。
定轴轮系齿轮传动有一对外啮合渐开线直齿圆柱体齿轮传动.已知 20,4,25,5021====αmm m z z ,两个齿轮的厚度都是50mm 。
⒈ 启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a new model ”,在模型名称(Model name )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框⒉ 设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
2.2 用鼠标左键点击选择(Select )图标,控制面板出现在工具箱中。
2.3 用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮3.1 在ADAMS/View 零件库中选择圆柱体(Cylinder )图标,参数选择为“NewPart ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm (10025042z m 1=×=×) 。
如图3-1所示。
图 2-1 设置工作网格对话框 图3-1设置圆柱体选项3.2 在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。
江西省南昌市2015-2016学年度第一学期期末试卷(江西师大附中使用)高三理科数学分析一、整体解读试卷紧扣教材和考试说明,从考生熟悉的基础知识入手,多角度、多层次地考查了学生的数学理性思维能力及对数学本质的理解能力,立足基础,先易后难,难易适中,强调应用,不偏不怪,达到了“考基础、考能力、考素质”的目标。
试卷所涉及的知识内容都在考试大纲的范围内,几乎覆盖了高中所学知识的全部重要内容,体现了“重点知识重点考查”的原则。
1.回归教材,注重基础试卷遵循了考查基础知识为主体的原则,尤其是考试说明中的大部分知识点均有涉及,其中应用题与抗战胜利70周年为背景,把爱国主义教育渗透到试题当中,使学生感受到了数学的育才价值,所有这些题目的设计都回归教材和中学教学实际,操作性强。
2.适当设置题目难度与区分度选择题第12题和填空题第16题以及解答题的第21题,都是综合性问题,难度较大,学生不仅要有较强的分析问题和解决问题的能力,以及扎实深厚的数学基本功,而且还要掌握必须的数学思想与方法,否则在有限的时间内,很难完成。
3.布局合理,考查全面,着重数学方法和数学思想的考察在选择题,填空题,解答题和三选一问题中,试卷均对高中数学中的重点内容进行了反复考查。
包括函数,三角函数,数列、立体几何、概率统计、解析几何、导数等几大版块问题。
这些问题都是以知识为载体,立意于能力,让数学思想方法和数学思维方式贯穿于整个试题的解答过程之中。
二、亮点试题分析1.【试卷原题】11.已知,,A B C 是单位圆上互不相同的三点,且满足AB AC →→=,则AB AC →→⋅的最小值为( )A .14-B .12-C .34-D .1-【考查方向】本题主要考查了平面向量的线性运算及向量的数量积等知识,是向量与三角的典型综合题。
解法较多,属于较难题,得分率较低。
【易错点】1.不能正确用OA ,OB ,OC 表示其它向量。
2.找不出OB 与OA 的夹角和OB 与OC 的夹角的倍数关系。
【解题思路】1.把向量用OA ,OB ,OC 表示出来。
2.把求最值问题转化为三角函数的最值求解。
【解析】设单位圆的圆心为O ,由AB AC →→=得,22()()OB OA OC OA -=-,因为1OA OB OC ===,所以有,OB OA OC OA ⋅=⋅则()()AB AC OB OA OC OA ⋅=-⋅-2OB OC OB OA OA OC OA =⋅-⋅-⋅+ 21OB OC OB OA =⋅-⋅+设OB 与OA 的夹角为α,则OB 与OC 的夹角为2α所以,cos 22cos 1AB AC αα⋅=-+2112(cos )22α=--即,AB AC ⋅的最小值为12-,故选B 。
【举一反三】【相似较难试题】【2015高考天津,理14】在等腰梯形ABCD 中,已知//,2,1,60AB DC AB BC ABC ==∠= ,动点E 和F 分别在线段BC 和DC 上,且,1,,9BE BC DF DC λλ==则AE AF ⋅的最小值为 .【试题分析】本题主要考查向量的几何运算、向量的数量积与基本不等式.运用向量的几何运算求,AE AF ,体现了数形结合的基本思想,再运用向量数量积的定义计算AE AF ⋅,体现了数学定义的运用,再利用基本不等式求最小值,体现了数学知识的综合应用能力.是思维能力与计算能力的综合体现. 【答案】2918【解析】因为1,9DF DC λ=12DC AB =,119199918CF DF DC DC DC DC AB λλλλλ--=-=-==, AE AB BE AB BC λ=+=+,19191818AF AB BC CF AB BC AB AB BC λλλλ-+=++=++=+,()221919191181818AE AF AB BC AB BC AB BC AB BCλλλλλλλλλ+++⎛⎫⎛⎫⋅=+⋅+=+++⋅⋅ ⎪ ⎪⎝⎭⎝⎭19199421cos1201818λλλλ++=⨯++⨯⨯⨯︒2117172992181818λλ=++≥+= 当且仅当2192λλ=即23λ=时AE AF ⋅的最小值为2918. 2.【试卷原题】20. (本小题满分12分)已知抛物线C 的焦点()1,0F ,其准线与x 轴的交点为K ,过点K 的直线l 与C 交于,A B 两点,点A 关于x 轴的对称点为D . (Ⅰ)证明:点F 在直线BD 上; (Ⅱ)设89FA FB →→⋅=,求BDK ∆内切圆M 的方程. 【考查方向】本题主要考查抛物线的标准方程和性质,直线与抛物线的位置关系,圆的标准方程,韦达定理,点到直线距离公式等知识,考查了解析几何设而不求和化归与转化的数学思想方法,是直线与圆锥曲线的综合问题,属于较难题。
【易错点】1.设直线l 的方程为(1)y m x =+,致使解法不严密。
2.不能正确运用韦达定理,设而不求,使得运算繁琐,最后得不到正确答案。
【解题思路】1.设出点的坐标,列出方程。
2.利用韦达定理,设而不求,简化运算过程。
3.根据圆的性质,巧用点到直线的距离公式求解。
【解析】(Ⅰ)由题可知()1,0K -,抛物线的方程为24y x =则可设直线l 的方程为1x my =-,()()()112211,,,,,A x y B x y D x y -,故214x my y x =-⎧⎨=⎩整理得2440y my -+=,故121244y y m y y +=⎧⎨=⎩则直线BD 的方程为()212221y y y y x x x x +-=--即2222144y y y x y y ⎛⎫-=- ⎪-⎝⎭令0y =,得1214y yx ==,所以()1,0F 在直线BD 上.(Ⅱ)由(Ⅰ)可知121244y y m y y +=⎧⎨=⎩,所以()()212121142x x my my m +=-+-=-,()()1211111x x my my =--= 又()111,FA x y →=-,()221,FB x y →=-故()()()21212121211584FA FB x x y y x x x x m →→⋅=--+=-++=-,则28484,93m m -=∴=±,故直线l 的方程为3430x y ++=或3430x y -+=213y y -===±,故直线BD 的方程330x -=或330x -=,又KF 为BKD ∠的平分线,故可设圆心()(),011M t t -<<,(),0M t 到直线l 及BD 的距离分别为3131,54t t +--------------10分 由313154t t +-=得19t =或9t =(舍去).故圆M 的半径为31253t r +== 所以圆M 的方程为221499x y ⎛⎫-+= ⎪⎝⎭【举一反三】【相似较难试题】【2014高考全国,22】 已知抛物线C :y 2=2px(p>0)的焦点为F ,直线y =4与y 轴的交点为P ,与C 的交点为Q ,且|QF|=54|PQ|.(1)求C 的方程;(2)过F 的直线l 与C 相交于A ,B 两点,若AB 的垂直平分线l′与C 相交于M ,N 两点,且A ,M ,B ,N 四点在同一圆上,求l 的方程.【试题分析】本题主要考查求抛物线的标准方程,直线和圆锥曲线的位置关系的应用,韦达定理,弦长公式的应用,解法及所涉及的知识和上题基本相同. 【答案】(1)y 2=4x. (2)x -y -1=0或x +y -1=0. 【解析】(1)设Q(x 0,4),代入y 2=2px ,得x 0=8p,所以|PQ|=8p ,|QF|=p 2+x 0=p 2+8p.由题设得p 2+8p =54×8p ,解得p =-2(舍去)或p =2,所以C 的方程为y 2=4x.(2)依题意知l 与坐标轴不垂直,故可设l 的方程为x =my +1(m≠0). 代入y 2=4x ,得y 2-4my -4=0. 设A(x 1,y 1),B(x 2,y 2), 则y 1+y 2=4m ,y 1y 2=-4.故线段的AB 的中点为D(2m 2+1,2m), |AB|=m 2+1|y 1-y 2|=4(m 2+1).又直线l ′的斜率为-m ,所以l ′的方程为x =-1m y +2m 2+3.将上式代入y 2=4x ,并整理得y 2+4m y -4(2m 2+3)=0.设M(x 3,y 3),N(x 4,y 4),则y 3+y 4=-4m,y 3y 4=-4(2m 2+3).故线段MN 的中点为E ⎝ ⎛⎭⎪⎫2m2+2m 2+3,-2m ,|MN|=1+1m 2|y 3-y 4|=4(m 2+1)2m 2+1m 2.由于线段MN 垂直平分线段AB ,故A ,M ,B ,N 四点在同一圆上等价于|AE|=|BE|=12|MN|,从而14|AB|2+|DE|2=14|MN|2,即 4(m 2+1)2+⎝ ⎛⎭⎪⎫2m +2m 2+⎝ ⎛⎭⎪⎫2m 2+22=4(m 2+1)2(2m 2+1)m 4,化简得m 2-1=0,解得m =1或m =-1, 故所求直线l 的方程为x -y -1=0或x +y -1=0.三、考卷比较本试卷新课标全国卷Ⅰ相比较,基本相似,具体表现在以下方面: 1. 对学生的考查要求上完全一致。
即在考查基础知识的同时,注重考查能力的原则,确立以能力立意命题的指导思想,将知识、能力和素质融为一体,全面检测考生的数学素养,既考查了考生对中学数学的基础知识、基本技能的掌握程度,又考查了对数学思想方法和数学本质的理解水平,符合考试大纲所提倡的“高考应有较高的信度、效度、必要的区分度和适当的难度”的原则. 2. 试题结构形式大体相同,即选择题12个,每题5分,填空题4 个,每题5分,解答题8个(必做题5个),其中第22,23,24题是三选一题。
题型分值完全一样。
选择题、填空题考查了复数、三角函数、简易逻辑、概率、解析几何、向量、框图、二项式定理、线性规划等知识点,大部分属于常规题型,是学生在平时训练中常见的类型.解答题中仍涵盖了数列,三角函数,立体何,解析几何,导数等重点内容。
3. 在考查范围上略有不同,如本试卷第3题,是一个积分题,尽管简单,但全国卷已经不考查了。
四、本考试卷考点分析表(考点/知识点,难易程度、分值、解题方式、易错点、是否区分度题)。