FAROArm关节臂测量操作指南ppt课件
- 格式:ppt
- 大小:13.92 MB
- 文档页数:135
关节臂三坐标测量机操作规程(ISO9001-2015/IATF16949-2016)1.0适用范围关节臂依靠其便携,高精度等优势,广泛用于汽车,模具,检具,航天等相关行业。
2.0操作方法2.1 机器安装2.1.1 打开包装箱,双手提取测量臂FaroArm,注意不要让各关节受力。
2.1.2 机器安装之前磁力底座跟安装磁力底座的位置都要擦干净,磁力底座固定好后,设备跟磁力底座接口(安装在三角架上)要用专用工具拧紧,注意扭矩适中。
利用绑带绑缚测量臂,防止其自由落下而损伤关节,注意每次测量完成都要将测量臂复位绑缚好。
2.1.3 安装探针时一只手握住FaroArm末端的按钮区域;顺时针旋转探针,将探针转入FaroArm,使用12mm扳手拧紧探针转矩扳手拧紧另一端,注意扭矩适中。
2.1.4 设备连接到计算机,通过数据线、电源线、将测量机跟电脑连接,将电池安装到测量臂主机上充电,注意检查是否连接正确,打开电源后电源指示灯亮,打开电脑及测量软件界面,插入加密狗,测量软件界面显示设备连接完好。
2.2 探针校准2.2.1 打开测量软件,在设备选项上点硬件配置图标打开设备控制面板,选中探针管理。
根据需要选择3mm球探针、6mm球探针。
2.2.2 选择“探针校准器”,将其固定。
2.2.3 在测量软件界面选择校准。
2.2.4 进行探针校准。
2.3 测量2.3.1 除了常规测量之外,对超出测量臂范围的大型工件,可以用三个“蛙跳球”进行位置移动转换测量。
2.3.2 在测量过程中不允许用力压迫探针,测量力道要均匀,测面测点尽量垂直探针,测量圆探针保护在45度的角度,减少误差。
2.3.3 每次测完步骤后测量臂复位及绑缚带绑缚,起到保护关节作用。
3.0注意事项3.1 要注意软件界面对测量臂FaroArm关节转动极限位置的报警提示,尽量减少测量臂在接近极限的状态下测量,延长设备使用寿命3.2 定期探针校准,在温差变化过大的情况下必须对探针进行校准在进行测量。

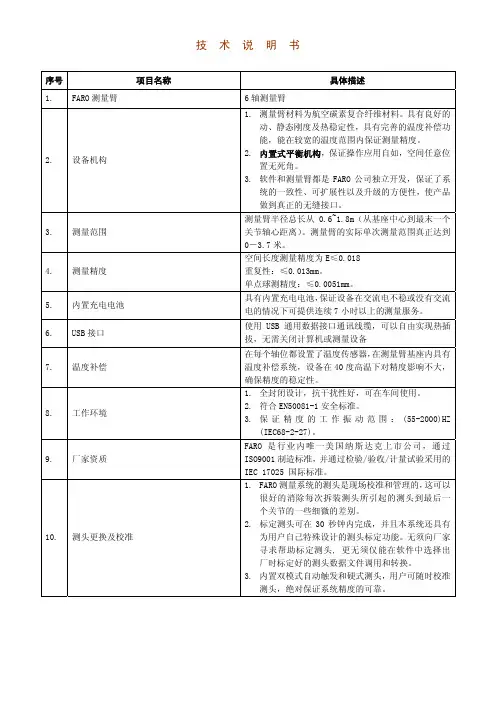
技 术 说 明 书序号 项目名称 具体描述 1.FARO测量臂 6轴测量臂2.设备机构 1.测量臂材料为航空碳素复合纤维材料。
具有良好的动、静态刚度及热稳定性,具有完善的温度补偿功能,能在较宽的温度范围内保证测量精度。
2.内置式平衡机构,保证操作应用自如,空间任意位置无死角。
3.软件和测量臂都是FARO公司独立开发,保证了系统的一致性、可扩展性以及升级的方便性,使产品做到真正的无缝接口。
3.测量范围 测量臂半径总长从0.6~1.8m(从基座中心到最末一个关节轴心距离)。
测量臂的实际单次测量范围真正达到0-3.7米。
4.测量精度 空间长度测量精度为E≤0.018 重复性:≤0.013mm。
单点球测精度:≤0.0051mm。
5.内置充电电池 具有内置充电电池,保证设备在交流电不稳或没有交流电的情况下可提供连续7小时以上的测量服务。
B接口 使用USB通用数据接口通讯线缆,可以自由实现热插拔,无需关闭计算机或测量设备7.温度补偿 在每个轴位都设置了温度传感器,在测量臂基座内具有温度补偿系统,设备在40度高温下对精度影响不大,确保精度的稳定性。
8.工作环境 1.全封闭设计,抗干扰性好,可在车间使用。
2.符合EN50081-1安全标准。
3.保证精度的工作振动范围:(55-2000)HZ(IEC68-2-27)。
9.厂家资质 FARO是行业内唯一美国纳斯达克上市公司,通过ISO9001制造标准,并通过检验/验收/计量试验采用的IEC 17025 国际标准。
10.测头更换及校准 1.FARO测量系统的测头是现场校准和管理的,这可以很好的消除每次拆装测头所引起的测头到最后一个关节的一些细微的差别。
2.标定测头可在30秒钟内完成,并且本系统还具有为用户自己特殊设计的测头标定功能。
无须向厂家寻求帮助标定测头, 更无须仅能在软件中选择出厂时标定好的测头数据文件调用和转换。
3.内置双模式自动触发和硬式测头,用户可随时校准测头,绝对保证系统精度的可靠。

便携式三坐标测量仪操作规程一、安装测量臂与探针:1、打开运输包装箱,双手提取测量臂FaroArm,注意不让测量臂各关节承受外力;2、安装将测量臂FaroArm通过螺纹固定于底座支架上,注意安装扭矩适中;3、利用绑带绑缚测量臂FaroArm,防止其自由下落而损伤关节;注意每测量步骤完成都要将测量臂FaroArm复位并绑缚;4、根据需要安装3mm球探针、6mm球探针或点探针,注意安装扭矩适中。
二、连接设备:1、通过数据线、电源线等将测量臂主机FaroArm、电源、电脑连接;可以将电池安装到测量臂主机充电器内充电;检查保证连接正确;2、打开电源,电源指示灯亮;打开电脑及测量软件界面;(测量软件需要“加密狗”);3、测量软件界面显示设备连接完好后,即可进行如下步骤。
三、探针校准:1、自定义探针:在测量软件界面中根据测量需要选择3mm球探针、6mm球探针或点探针;2、选择“单孔探针校准圆锥”或“球探针校准器”,将其固定;3、在测量软件界面选择“单孔校准”或“球校准”导航校准;4、进行探针校准。
四、测量:除了常规测量之外,对超出测量臂测量范围的大型工件,还可以用三个“蛙跳球”进行位置移动转换测量。
测量过程注意事项:1、必须做探针校准;2、注意测量软件界面中对测量臂FaroArm关节转动极限位置的报警提示;3、每测量步骤完成测量臂FaroArm的复位及绑缚,有效保护关节;4、使用配备电源,并杜绝工作状态将FaroArm断电;但数据线可以即时插拔;5、被测量工件必须与测量臂FaroArm相对位置保持固定,可采用热溶胶固定或夹持工件等方法。
五、测量结果分析,报表:1、及时保存测量结果输出数据;2、可打印测量结果输出数据报表;3、可将测量结果与数据模型进行比对,输出数模比对数据报表。
六、拆卸:1、必须首先拆卸探针并放置到探针盒中正确位置;2、注意保护测量臂FaroArm;编制:安仁图审核:批准:不定积分解题方法总结摘要:在微分学中,已知函数求它的导数或微分是需要解决的基本问题。

FARO ARM便携式三坐标测量臂的应用1. 法如公司简介法如(FARO)创立于1981年,企业总部位于美国佛罗里达州的奥兰多市,从创立以来致力于便携式测量系统的研发、制造和服务,产品包括:测量机、测量臂、激光跟踪仪、激光扫描仪、3D扫描仪。
作为便携式测量系统的世界领先者,迄今为止,法如在全球安装超过2万台设备,广泛应用于夹具、检具、模具、整机外型及零部件检测、CAD数模对比、逆向工程等等领域。
小至螺丝钉,大至飞机建筑物等,均可在FARO的产品线里,找到合适的量测设备。
法如于2004年2月在上海成立中国分公司,在北京、广州、成都、长春、西安、长沙等地设有服务点,同时在上海建有用户体验中心、校准及标定实验室、技术服务中心、配件及备机仓库。
2. FARO ARM测量臂介绍当您正在费尽心思为无法将大型工件搬上固定式三坐标的大理石平台去测量而束手无策时;当您面对一大堆量具、量规却仍感到无法满足测量要求时;当您正抱怨测量机的死角让你无法满足测试要求时;当您正无耐将工件反复搬运到测量间而浪费时间时;当您觉得一台测量仪器重复性很差而无法信任它的精度稳定性时;FARO便携式三维柔性测量臂是您的最佳选择!FARO便携式三坐标测量臂的精度高达0.024mm,使传统CMM、手工工具和其它便携式检查设备难以匹配。
现在您可在任何地方对部件、固定设备及组件进行精密检查、逆向工程或执行CAD至部件分析。
如果您将该精度与其可修改的3D测量技术和定制零培训软件工具(带或不带 CAD)结合起来, FARO测量臂将是需要 GD&T和 SPC(Statistical Process Control 统计过程控制)输出的成型、铸模、制造、铸造及装配设备的理想解决方案。
此外,它还具备真正的便携性能和改进的生物工程技术。
事实上,超负荷传感器可防止用户使手臂超载,从而确保测量的精确性,使其成为“唯一有感觉的测量臂”。
FARO Arm测量系统,是全球第一套个人化坐标量测系统,也是行业中首选的携带式三坐标测量系统正满足您就地安装使用的需求。

FARO ARM三坐标测量机基本操作过程一.重型三角架1.1三角架底座的移动1.1.1升起三角架底座1.1.1.1脚踩在脚踏板上,将其向下并朝向三角架中心压动,同时握住三角架稳定杆,向上提起,使三角架底座升起,确定只有滚动轮接触地面,以便将三角架移动到需要的位置。
1.1.1.2将脚从脚踏板上移走,脚踏板将锁定在适当位置。
1.1.2 降下三角架底座:脚踩在脚踏板上,将其向下并向三角架中心向外压动,使三角架的底座下降,滚动轮回缩,然后,弹起脚踏板。
1.1.3 固定三角架:手动调整三个调整螺钉,直到平稳,然后用扳手将三角架底座上的锁紧螺母锁定,防止三角架在不平坦的地面摇晃。
1.2调整三角架1.2.1升起三角架立柱1.2.1.1将锁紧手柄逆时针方向旋动,放松夹具,使立柱可以上下移动。
1.2.1.2逆时针方向旋动升降手柄,调整三角架立柱到希望高度。
1.2.1.3锁紧锁紧手柄,推下顶舌,使立柱固定不动。
1.2.2降低三角架立柱1.2.2.1将锁紧手柄逆时针方向旋动,放松夹具,使立柱可以上下移动。
1.2.2.2逆时针方向旋动四方手柄大约1英寸,将顶舌抬起。
1.2.2.3顺时针方向旋动四方手柄,使立柱降低。
1.2.2.4锁紧锁紧手柄,使立柱锁定在固定位置。
二.安装FARO ARM:正确的安装方法是保证测量精度的基础。
2.1将快速安装卡盘安装到三角架底座安装面板上,拧紧固定螺栓。
2.2将FARO ARM的下底座安装到快速安装盘上,并用扳手拧紧。
2.3选择所需用的测头安装到FARO ARM上,注意用力适度,以免损伤螺纹和影响测量精度。
2.4注意:三角架最好安装在水平面上,坡度较大时要防止ARM 坠落摔伤。
ARM暂时不用时要把第2和第6关节相对放置,并用臂固定贴固定好。
三.选择相应的校准器(球校准器或锥校准器),并固定在FARO ARM臂长的1/2-2/3范围处,以备FARO ARM校准之用。
四.连接计算机和FARO ARM4.1将端口锁(加密狗)插入到计算机的USB接口上,以授权CAM2正常运行。