FARO操作手册
- 格式:pdf
- 大小:4.21 MB
- 文档页数:83


FARO EDGE产品介绍•结构1.臂管12.臂管23.探针4.按钮5.手柄6.7轴手柄(可拆卸)7.锁定按钮8.状态面板9.可折叠式触摸屏控制器B驱动器端口11.SD RAM卡端口12.底座卡环FARO EDGE 产品介绍•结构13.减震器14.开/关开关15.电源端口B端口17.以太网端口18.手柄存放磁铁FARO EDGE 安装操作•底座安装通过手柄拧紧底座卡环FARO EDGE 安装操作•探针安装1.握住EDGE的末端的按钮区域2.顺时针旋转探针,将其旋入注意:安装探针时,切勿在按钮区外的地方握住EDGE。
FARO EDGE 安装操作•探针的放置手柄放置时,确保磁扣对齐、吸住。
FARO EDGE 安装操作•FARO EDGE的7轴1.逆时针旋转松开锁定环2.将7轴手柄的前端插入槽里3.向里推7轴手柄,接好接头4.顺时针旋转拧紧锁定环注意:收起设备时,先卸下7轴手柄FARO EDGE 安装操作•FARO EDGE的电源1.电源开关2.电源端口FARO EDGE 安装操作•触摸屏控制器按下底座顶部的锁定装置可以打开触摸屏控制器。
FARO EDGE 安装操作•电池安装1.将圆的一面朝下滑入电池组。
2.向内推动电池,直至其卡入到位。
FARO EDGE 安装操作•电池拆卸1.向右推动电池组释放杆2.将电池组拉出FARO EDGE 安装操作•电池充电1.Edge 接通电源后,电池组便开始充电。
即使电源为关闭位置,电池组也将充电。
电池组充电完毕后将自动停止。
2.电池组内置有电量表。
按下连接器边上的软按钮,观察 LED 即可了解当前电量。
FARO EDGE操作规程•正确操作1.安装FaroEdge时,注意使用正确的手法进行提拎。
2.如果仪器安装在三脚架上,请确保三脚架上的所有螺纹连接已经拧紧;如果安装在磁力吸盘上,检查并除去磁力座的底部油污或铁屑等杂物;如果安装在真空吸盘上,一定要按说明书正确使用,以免漏气发生一些意外。
分类代码:备案号:法如(FARO)柔性臂测量机及PI软件应用手册目次前言 (III)1范围 (4)2规范性引用文件 (4)3术语和定义 (4)4参考文献 (4)5测量条件 (4)5.1环境条件 (4)5.2操作条件 (4)5.3系统条件 (4)5.4设备点检 (5)5.5设备连接 (5)6测量要求 (7)6.1检具数模要求 (7)6.2检具恒温要求 (7)6.3底板相关项目要求 (7)6.4检具基准要求 (7)6.5检具的制造精度要求 (7)6.6检具常规标识要求和测量构成部分 (8)6.7测量元素的测量要求 (9)6.7.1本体面的测量要求 (10)6.7.2检测线的测量要求 (10)6.7.3定位的测量要求 (10)6.7.4检测销的测量要求 (11)6.7.5检测块的测量要求 (12)6.7.6卡板的测量要求 (13)6.7.7基准块的测量要求 (13)6.8数模颜色与测量精度 (14)7测针校准 (14)7.1探测误差校准方法的原理 (14)7.2取点原则 (14)7.3测量结果的处理 (14)7.4操作流程 (14)7.5注意事项及结果查看 (15)8建立坐标系 (16)8.1几何法 (16)8.2迭代法 (18)8.3自由拟合法 (19)9对检具的测量 (21)9.1检具的定义 (21)9.2测量流程 (21)10对检具的复测 (23)10.1复测的重要性 (23)10.2复测事项 (23)10.3不同种类检具的复测 (23)11对检具的整改 (25)11.1整改流程 (25)11.2完善程序及归档 (27)12关节臂的维护与保养 (27)12.1维护环境 (27)12.2保养流程 (27)12.3使用事项 (28)12.4稳压电源 (28)前言本手册旨在规范关节臂测量机的使用,提高测量专业度意识,保证测量精度。
主要从测量条件、测量要求、测针校准、建立坐标系、对检具的测量、对检具的复测、对检具的整改、关节臂的维护与保养几个方面,针对日常测量使用中遇到的问题和易忽略的细节,来规范合理的标准。

Faro 跟踪仪的补偿和使用步骤一、Faro跟踪仪的补偿概述:如所有其它高精度仪器一样,必须定期检查 FARO 激光跟踪器。
补偿在必要时能够测试跟踪器和调节参数。
补偿能够修正激光跟踪器的误差,在跟踪器交付后或受到碰撞后需要进行现场补偿操作。
1.自动补偿自动补偿是一种完全自动化程序,也是补偿跟踪器的主要方法。
该程序纠正角度测量误差。
命令:设备---硬件配置--- CompIT主菜单按钮“自动补偿”按钮开始程序。
该过程完成(大约需要5分钟)后,跟踪器位于定向精确度规范内-做好测量准备。
2.后视自动补偿程序运行完成之后,检查后视误差以验证精确度。
命令“后视”,将Faro跟踪仪1.5”SMR置于鸟巢和测量范围内的几个位置,最后点击继续按钮,以确定Faro跟踪仪的后视精度是否通过。
3.Faro跟踪仪经过长途运输或长时间工作之后,经过自动补偿也许不能通过后视精度验证。
此时就需要作定向补偿。
定向补偿包括两个过程:中间测试和定向补偿。
1).中间测试是把1.5”SMR置于电脑屏幕提示位置进行测量,当SMR置于提示位置时,屏幕上的实际值显示绿色,并计算后视误差。
测量之后,跟踪器测试将通过或失败。
包括以下三个位置:• 方位角 90 度、顶点角 90 度、距离 6 米。
• 方位角 -45 度、顶点角 90 度、距离 2 米。
• 方位角 45 度、顶点角 135 度、距离 2 米。
2).中间测试完成之后,请选择“继续”按钮以进行定向补偿。
同样地,把1.5”SMR置于电脑屏幕提示位置进行测量,其中包括以下几个位置:• 任意方位角、顶点角 90 度、距离 2 米。
• 任意方位角、顶点角 90 度、距离 3.6 米。
• 任意方位角、顶点角 90 度、距离 5.2 米。
• 任意方位角、顶点角 90 度、距离 6.8 米。
• 任意方位角、顶点角 90 度、距离 8.4 米。
• 任意方位角、顶点角 90 度、距离 10 米。
完成最后的测量后,按“继续”按钮。


color photographs of the FARO color option, automatically detecting and equalizing differences in the distortion and alignment of the photos. Measuring and Analyzing Generation of objects, including points, spheres, planes, and cylinders directly from the scan data. Measuring between scan points and objects. Checks for flatness.Global Sales Offices: USA • Mexico • Germany • Switzerland • France • United Kingdom • Spain • Italy • Netherlands • Poland • Singapore • China • Japan • India •Brazil800.736.023404REF201-042.pdf Revised: 3/26/09Specifications Editing Scan Data■ Automatic search for reference spheres and black and white reference targets■ Object markers for the manual identification of spheres, black and white reference targets, circular reference targets, planes and slabs ■ Online correspondence search for the automatic assignment of reference points■ Automatic coloring of the scans with the high-resolution color photographs of the FARO color option■ Coloring of scan points with the aid of imported color photos ■ Deletion of scan areas■ Generation of new scan files of selected areas ■ Filters (including “dark points”, and “stray points”)Data Management of Extensive Projects ■ Hierarchical structure■ Bundling of unlimited number of scans to one project Analysis■ Distance measurement ■ Analysis of evennessImport & Export■ Control points for geo-referencing (.cor, .csv)■ Scan points (FARO Scan, FARO Cloud, .dxf, VRML, .igs, .txt, .xyz, .xyb, .pts, .ptx, .ptc, .ptz [import only], .pod [export only])■ CAD objects (.wrl [im- & export], .igs and .dxf [export only])■ Import digital photos (.jpg, .png, .bmp)■ Export panoramic images (.jpg)■ Online data transfer to FARO Cloud for AutoCAD Navigation■ Displaying of scan positions for viewpoint selection and changing to other scans by clicking■ 3D navigation in flight and inspection mode■ Predefined views (front view, side view, top view)Creating Workspaces ■ Scans & CAD objects■ Object fitting with visual quality indicators for spheres/tubes/planes (including automatic border detection)■ Meshing■ Measurements■ Intuitive user interface with structure viewViews■ 3D view■ Planar & Quick view■ Color scans are shown either in black & white or color ■ CAD object display ■ Print preview■ Color gradient depiction for displaying point distances from reference planes or the scanner locationGeneral。
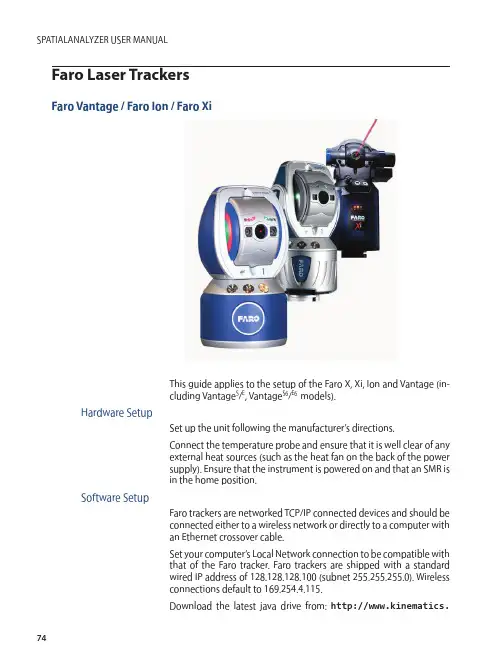
74F aro Laser TrackersFaro Vantage / Faro Ion / Faro Xi This guide applies to the setup of the Faro X, Xi, Ion and Vantage (in-cluding Vantage S /E , Vantage S6/E6 models). Hardware SetupSet up the unit following the manufacturer’s directions. Connect the temperature probe and ensure that it is well clear of any external heat sources (such as the heat fan on the back of the power supply). Ensure that the instrument is powered on and that an SMR is in the home position. Software SetupFaro trackers are networked TCP/IP connected devices and should be connected either to a wireless network or directly to a computer with an Ethernet crossover cable. Set your computer’s Local Network connection to be compatible with that of the Faro tracker. Faro trackers are shipped with a standard wired IP address of 128.128.128.100 (subnet 255.255.255.0). Wireless connections default to 169.254.4.115. Download the latest java drive from: http://www.kinematics.com/ftp/SA/Install/Driver Downloads/Laser Trackers/Faro/. Extract the fi les to the C:\ drive. This should create a directorystructure with the Faro Java fi les contained in C:\FaroJRE.Your JRE fi les must match your version of SA...■Versions 2017.02.09 and older, use the Faro JRE v4.3■Versions 2017.02.09 to 2018.07.11, use the Faro JRE v5.0.0.1■Versions 2018.12.07 to 2019.11.21, use the Faro JRE v5.1.3.1■Version 2020.04.09, use the Faro JRE v5.1.7.3■Version 2020.07.20 and 2020.12.01 use the Faro JRE v5.1.8.3■Version 2021.01 and newer use the Faro JRE v5.1.9.4 (requiredto support the 6D probe2)If you plan to use the video (overview) camera, you must also get the‘Faro Tracker Camera fi les.zip’ fi le (version matching that of the JREFiles). Unzip the fi le and follow the instructions contained in ReadMeFaro Camera.txt. Note that cameras are wireless. If your camerahas the default IP address, you can set your PC’s wireless connection’saddress to 129.129.0.1.Starting the Interface1. Select Instrument > Add and choose the appropriate Faro track-er from the Add Instrument to SA dialog (Figure 3-64).Figure 3-64. Adding a Faro tracker752. Run Interface Module without connecting (Instrument > Run In-terface Mode) and choose Laser Trackers.3. Within the Connect to Spatial Analyzer dialog, Se-lect the instrument station (computer name, job name,Collection::Instrument Name: Serial Number) you wish to con-nect your instrument to from the network list and press OK.4. This will bring up the Faro Connection dialog (Figure 3-65).Figure 3-65. T he Faro Connectiondialog5. Enter the tracker’s IP address (if diff erent than the default) anduse the Ping button to test the connection if needed.Once satisfi ed, click OK. The next time you connect this instrument tothe instrument, you can just select Run Interface and Connect. This willutilize the last saved settings and automatically connect the instru-ment.Notes on the connection process:■The fi rst 7 digits of the tracker serial number can also be usedto fi nd the tracker. When you use this method it will search forboth a wired and wireless connection.■To connect Wireless, be sure to connect your computer to thetrackers wireless signal and use either the serial number or thewireless IP address which will something like 169.254.1.1 (notthe wired default).■If you have any trouble be sure to check your windows fi rewall.Exceptions need to be made for both the Spatial Analyzer andSA Laser Tracker applications.The interface is now connected and ready for use. Please refer to theMeasurements chapter of the manual for more details on the tracker76interface and instrument settings options.Faro Specifi c SettingsDistance ModeBeam rest can be manually overridden as needed. Choose between:■ADM Only. This mode restricts beam tracking operations toADM only.■IFM Only. This mode restricts beam tracking operation to IFMonly which requires a homing procedure each time the beamis broken.■IFM Set by ADM. Faro’s default mode which is a hybrid modethat provides accurate tracking using IFM and easy beam re-capture using ADM modes.External Trigger Settings■External Trigger Settings. The external trigger will apply toANY measurement profi le which has either a spatial or tempo-ral scan as it’s Acquisition.When “External” is set (for the Measurement Start Trigger in the FaroTracker Settings), points will be taken when the trigger is pulsed. Theonly requirements is that a profi le must be started for the externaltrigger to be recognized which as an Acquisition mode of either spa-tial or temporal scan. The advantage of this design is that no adjust-ments to the measurement profi le need to be made, and any profi lewill work (Figure 3-66).■The trigger cable must be connected to the “Up” port on thetracker controller.■0 Volts on the trigger port implies take data and send the datain continuous mode (where as 5Volts indicates stop). So bydefault the external trigger is set to on and sending data andmust be powered to stop sending data. This means that if thereis no external trigger, the measurement will simply begin at themaximum temporal rate of the trackers.77Figure 3-66. F aro tracker settingsincluding external trigger settingsSearch SettingsFaro’s video camera is used is used for refl ector acquisition and pro-vides a couple of optional modes:■Camera Search Enabled. This option enables camera search.Disabling this option is used to limit target search to a beamspiral search only.■Find Me Enabled. This is similar to the “Gesture Recognition”setting and allows the tracker to snap to the moving target.■Active Seek Radius. Active Seek can be set from main window(formerly “Smart Find”) dialog if supported. The Active Seek Ra-dius can be set to limit the search zone relative to the currentbeam position considered by the camera.Spatial Scan Data Buff eringData buff ering was added to ensure that SA keep up with data deliv-ered form the instrument. With a very tight scan increment this canbe quite fast (~100Hz).■Enable Faro Data Buff ering. Provides a switch to enable ordisable data buff er. If unchecked, behavior is unchanged fromprevious versions■ Buff er Size. Default is 0.2. At 0.2, for a spatial increment of0.01” (2.54 mm), the buff er would be 0.2/0.01 = 20 pts. Anotherway to look at this is the Buff er Size means the number of inch-es worth of data that will get buff ered. So at a value of 1.0 anda spatial increment of 0.01”, the buff er size would be 1.0/0.01 =100 pts, and with a point every 0.01”, 100 of them takes up 1.0inch.78■Do not buff er if increment is >= . This allows you to set a max-imum increment for which buff ering will occur. The defaultvalue is 0.1, meaning that when you set a spatial increment of0.1” (2.54 mm) or higher, no buff ering will occur.Its important to know that this buff ering happens on the Faro side,the interface will not receive any data until the buff er is fi lled. So forexample, you cannot set a scan whose increment would result in acalculated buff er size of 100 points, and yet set a profi le to stop at 20points because it will not send data at all until 100 points have beenrecorded.Specialty TargetsWindowed SMR Confi gurationWindowed SMR’s have an additional ADM off set, due to their glassfront, which needs to be accounted for. This is done by building a tar-get based upon the correct refl ector defi nition (see “Targets and Ret-ros” on page 19). Care should be taken to always use a target that isrepresentative of the actual refl ector being used or an error equal tothe ADM constant may be seen in your measurements.As stated in the Faro accessories manual, proper use of the windowedSMR requires sending it home when the target type is set correctly,otherwise an error will occur. This ensures the correct ADM off set isused. Additionally, when running startup checks or CompIT with thewindowed SMR, you should be sure to send the tracker home after-wards, as these routines assume 1.5” standard SMR is being used. Anadditional homing operation should be performed to update the tar-get defi nition.Faro 6D ProbeFaro’s 6D probe can be used within SA, using the Vantage S6 and Vanta-ge E6 trackers. No additional driver installation is required. Compatibletrackers will include a 6Probe defi nition.■The Faro 6Probe version 2 with exchangeable tips requires SAversion 2021.01 or later.The 6probe target detection is automatic but an initial connectionand activation process must be performed each time the 6D Probe ispowered on, and would go as follows:1. Connect to the Tracker2. Power on the 6D Probe Unit and catch the beam.3. Press any button on the probe and wait (approx. 10-20 sec.)for the probe’s “happy” beep and blue LED. If you have troublegetting the 6Probe to activate, try moving it farther from thetracker.794. After the fi rst successfully pairing of the 6Probe and tracker,you’ll be asked if you want to pop the Probe Management UIto set the active probe tip. Hit “Yes”, and select a tip that isValid, or Calibrate at least one probe tip, and select it.The probe is auto-detected once a probe tip is activated. When you lock back on to a 3D probe, the last used 3D probe will be set ac-tive for you. The pairing process will not be necessary again until the probe is powered down.The follow status indicator lights may be displayed:■No Lights Flashing. Press a probe button to begin the initial connection process.■Flashing Blue Lights. A connection to the probe is being made... wait for completion.■Flashing Red Lights. Connection attempt failed. Press a but-ton to begin again.■Flashing Green Lights. Success full connection has been es-tablished, waiting for tip selection. The Probe Management UI will open automatically to allow tip selection.■Solid Green Lights. Ready to Measure.Once confi gured, the probe is auto-detected and will be set simply by catching the beam. When you lock back on to a standard 3D refl ector, the last used refl ector (such as a 1.5” ball) will be set as active.Tip selection and calibration is performed within the Faro utility win-dow that can be displayed directly from the Home Button in the inter-face which will read Manage Tips when a 6probe is active (Figure 3-67). Also note that the name and diameter of the active probe defi nitions is displayed on the Measure button.Figure 3-67. T ip Selection control from the “Home” button8081This utility is also accessible as a target defi nition within the Refl ec-tors and Targets database, where the 6Probe target functions as a but-ton and provides access through a left click to Faro’s Probe Manage-ment utility (Figure 3-68).Faro’s Probe Management utility provides:■Ability to select directly for a list of defi ned probe tips. The 6Probe version 2 will recognize tips automatically when theyare connected, but changes to the calibration or initial setup is still performed in this dialog.■With the addition of the auto-detect tips this is typically not necessary but it is possible to defi ne multiple tips for a holder.■Probe Compensation options■Probe Check options Figure 3-68. F aro’s M anagement U Ior tip selection and compensation Tool.Note that undefi ned tips will have an initial off set of -1 meter. To program the 6Probe’s buttons, just click on the “gear” icon (),and then on the Faro button (Figure 3-69).Figure 3-69. 6D Probe buttons canbe confi gured as needed through thegeneral setting.When set up for a given work fl ow, such as using the inspection tasklist, these buttons can be used to work for long periods without go-ing back to the computer. In addition, the 6Probe can be used as aremote even when using and SMR.A set of standard 6D measurement profi les will also be available withthe 6D Probe (Figure 3-70).Figure 3-70. S tandard Set of 6D Measurement ProfilesThese provide a starting point for custom measurement profi le de-velopment. 6D measurements send frame’s to SA to graphically de-fi ne position and orientation, which can be used in combination withregular point measurements (which also do save the probing infor-mation in the measurement details). For more information on defi n-ing measurement profi les (see “Measurement Profi les” on page 25).Running the Tracker Interface SeparatelyOne of the unique features about SA’s architecture is that the instru-82ment interface can be run separately from SA. This provides a meansto run multiple trackers independently on diff erent machines whileconnect to a single SA for data storage. Doing so also provides theability to separate the persistence fi les for individual trackers, as thepersistence fi le will be saved in the directory as where the tracker in-terface is launched, as opposed to the C:\Analyzer Data\Persistencefolder.In order to run the SA Laser Tracker process separately some addition-al support fi les are required. These include the following fi les (Figure3-71):the SA Laser Tracker process indepen-dently from SA.83。
FARO ARM三坐标测量机基本操作过程一.重型三角架1.1三角架底座的移动1.1.1升起三角架底座1.1.1.1脚踩在脚踏板上,将其向下并朝向三角架中心压动,同时握住三角架稳定杆,向上提起,使三角架底座升起,确定只有滚动轮接触地面,以便将三角架移动到需要的位置。
1.1.1.2将脚从脚踏板上移走,脚踏板将锁定在适当位置。
1.1.2 降下三角架底座:脚踩在脚踏板上,将其向下并向三角架中心向外压动,使三角架的底座下降,滚动轮回缩,然后,弹起脚踏板。
1.1.3 固定三角架:手动调整三个调整螺钉,直到平稳,然后用扳手将三角架底座上的锁紧螺母锁定,防止三角架在不平坦的地面摇晃。
1.2调整三角架1.2.1升起三角架立柱1.2.1.1将锁紧手柄逆时针方向旋动,放松夹具,使立柱可以上下移动。
1.2.1.2逆时针方向旋动升降手柄,调整三角架立柱到希望高度。
1.2.1.3锁紧锁紧手柄,推下顶舌,使立柱固定不动。
1.2.2降低三角架立柱1.2.2.1将锁紧手柄逆时针方向旋动,放松夹具,使立柱可以上下移动。
1.2.2.2逆时针方向旋动四方手柄大约1英寸,将顶舌抬起。
1.2.2.3顺时针方向旋动四方手柄,使立柱降低。
1.2.2.4锁紧锁紧手柄,使立柱锁定在固定位置。
二.安装FARO ARM:正确的安装方法是保证测量精度的基础。
2.1将快速安装卡盘安装到三角架底座安装面板上,拧紧固定螺栓。
2.2将FARO ARM的下底座安装到快速安装盘上,并用扳手拧紧。
2.3选择所需用的测头安装到FARO ARM上,注意用力适度,以免损伤螺纹和影响测量精度。
2.4注意:三角架最好安装在水平面上,坡度较大时要防止ARM 坠落摔伤。
ARM暂时不用时要把第2和第6关节相对放置,并用臂固定贴固定好。
三.选择相应的校准器(球校准器或锥校准器),并固定在FARO ARM臂长的1/2-2/3范围处,以备FARO ARM校准之用。
四.连接计算机和FARO ARM4.1将端口锁(加密狗)插入到计算机的USB接口上,以授权CAM2正常运行。
PROGRAMMABLE CLUSTER HEADENDFRPRO LIGHT HDOPERATING INSTRUCTIONSIt is possible to download the FRPRO LIGHT HD manual on the relative product’s page on web sitePRODUCT DESCRIPTIONThe Fracarro FRPRO LIGHT HD is an high selective programmable compact headend for filter, convert and amplify the VHF/UHF Digital Terrestrial channels as well as mix the FM signal. The headend is a complete Digital Channel Processor that can be used on small, medium or high installation plants as well as in hospitality environments.Can process and convert more than 50 independent RF channels with very high selectivity on adjacent multiplexesAGC automatic control circuit on all individual VHF and UHF input multiplexesIsofrequency or converted channel filtering for every multiplex coming from VHF or UHF input.Security code available for avoid incidental settings1 FM input, 1 VHF+DAB input and2 independent UHF inputs; with selectable 12-24 V remote power on VHF and UHFinputsPRODUCT INSTALLATIONConnect the device to the grounding electrode of the antenna system and fix the FRPRO LIGHT HD in verticalposition to guarantee the correct ventilation and heat dissipation.Connect the power cord to the power supply socket and check the STATUS LED for DC power presence.Connect FM, VHF and UHF aerial’s coaxial cables to the FRPRO LIGHT HD headend.Connect the RF output coaxial cable to the RF coaxial distribution network.If necessary, connect a field meter to the -30dB test port to check the quality signal.Configure the device using the three settings buttons available on the top of the FRPRO LIGHT HD headend; pressthe confirm button for two seconds to access to the main menu and use the left/down or right/up arrows to scroll the sub-menu.If necessary, the power adapter can easily be replaced, without unmount the product, by open the top left plastic cover; please refer to the Safety Warnings chapter before proceed.FACTORY SETUP: before starting the configuration, it is advised to set the correct VHF and UHF frequency plan. Power off the device,Push the confirm button and keep it pushing while you turn-on the FRPRO LIGHT HD.Release the button when RESET FINISHED message is shown on display.To activate the correct frequency plan select the REGION where the headend is situated and save with the confirmbutton; Europe (EU) is the default setting.HEADEND CONFIGURATIONPress the confirm button for two seconds to access the different menus or for confirm the selection; scroll all the menu by using left/down or right/up arrows for move through the different settings.INPUT CONFIGURATIONSelect INPUT FM to setup the desired FM input signal gain.Select INPUT VHF, INPUT UHF 1 o INPUT UHF 2 to enter the VHF/UHF input settings.Set 12V or 24V on DC if it is necessary to insert the power supply to feed the external must amplifiers; 100mA is thetotal available current for VHF and UHF inputs; on advanced settings it is possible to set 12V or 24V.Select ADD CHANNEL to add the RF channel on the list of the managed filtered multiplexers by the relative input; todelete the unwanted RF channel, move on the position of the channel by using left/down or right/up arrows buttons and press the confirm button for 3 seconds until CHANNEL DELETED message is shown on the display. Up to 5 channels can be added and converted at once; first select the channels you want to add, then you can convert them. For example:o To add CH5 and convert to CH6, select as follows: 5: 5 -> 6: 6o To add CH21-22-23 and convert to CH31-32-33, select as follows: 21:23 -> 31:33For the best performances, it’s recommended to add and process only single channels, unless you need to process a lot of channels.OUTPUT CONFIGURATIONBy selecting OUTPUT and LEVEL menu it is possible to define the total RF output level from 88dBµV to 108dBµV,depending on the total multiplexes amount managed by the headend, 98dBµV is the default level.DC VOLTAGE: set 12V or 24V remote power available on VHF and UHF inputs.AUTO CH: it suppresses noise when a channel stops broadcasting, to avoid the MER affect of neighbouring channels.FILTER: set the following filtering characteristics:o BEST MER: best quality thanks to a larger filtering; it is not suitable for adjacent channel distribution.o OPTIMAL: default value, best trade off between large filtering and high selectivity.o SHARP: best selectivity tanks to a thinner filtering, suitable to distribute adjacent channels.SAFETY WARNINGSThe product must only be installed by qualified persons, according to the local safety standards and regulations. Fracarro Radioindustrie is free from all civil and criminal responsibilities due to breaches of the current legislation derived from the improper use of the product by the installer, user or third parties. The product must be used in full compliance with the instructions given in this manual in order to protect the operator against all possible injuries and the product from being damaged. Don’t open the product case: components under dangerousvoltage may be accessible when the case is opened.Installation warningsThe product must not be exposed to any dripping or splashing and thus it should be installed indoors and in a dry location.Handle the product carefully. Impacts can damage the product.Excessive temperatures and/or an overheating may affect the performance and the life of the product.In the event that the unit is fixed to the wall, use the proper screw anchors suitable to the characteristics of the fixing support. The wall and the anchoring system must be able to support at least 4 times the weight of the unit.Warning: to avoid injury, this appliance must be secured to the wall depending on the installation instructions. For "PERMANENTLY INSTALLED APPLIANCES", an easily accessible cutting device must be added to the exterior of the appliance; for "APPLIANCES WITH A POWER PLUG", the socket must be installed close to the appliance and easily accessible. The product must be connected to the grounding electrode of the antenna system in compliance with standard EN 60728-11. The screw provided for this purpose is marked with the symbol:It is recommended to comply with the provisions of the standard EN60728-11 and to connect this screw to the main earth node of the plant (do not connect to intermediate points).•Earth screw symbolClass II symbolGeneral warnings: In the event of a malfunctioning, do not try to fix the product as the guarantee would be invalidated. Only use the power supply supplied with the product. Although the information given in this manual has been prepared carefully and thoughtfully, Fracarro Radioindustrie S.r.l. reserves the right to modify it without notice and to improve and/or modify the product described in this manual. See the website to have information relevant to the technical support and product guarantee.The recycling of materials will help to conserve natural resources.CONFORMITY TO EUROPEAN LAWSFracarro declares that the product complies with EU Directive 2014/53 and 2011/65/UE. The full text of the EU Declaration of Conformity is available on the following website .USER’S INFORMATIONDisposal of Old Electrical & Electronic EquipmentApplicable in the European Union and other European countries with separate collection system This symbol on the product or on its packaging indicates that this product shall not be treated as household waste. Instead it shall be handed overto the applicable collection point for the recycling of electrical and electronic equipment. By ensuring this product is disposed of correctly, you willhelp prevent potential negative consequences for the environment and human health, which could otherwise be caused by inappropriate wastehandling of this product. The recycling of materials will help to conserve natural resources. For more detailed information about recycling of thisproduct, please contact your local city office, your household waste disposal service or the shop where you purchased the product.Guaranteed by Fracarro Radioindustrie SRL Via Cazzaro n. 3, 31033 Castelfranco Veneto (Tv) – ItalyFracarro Radioindustrie SRL: Via Cazzaro n.3 - 31033 Castelfranco Veneto (TV) - ITALIA - Tel: +39 0423 7361 - Fax: +39 0423 736220Fracarro France S.A.S.: 7/14 rue du Fossé Blanc Bâtiment C1 - 92622 Gennevilliers Cedex - FRANCE Tel: +33 1 47283400 - Fax: +33 1 47283421Fracarro (UK) – Ltd: Suite F9A, Whiteleaf Business Centre, Little Balmer, Buckingham, MK18 1TF UK - Tel: +44(0)1908 571571 - Fax: +44(0)1908 571570**************************************************@-chatwhatsapp+393357762667FRPROLIGHTHD-E2-12-219-rev.3。
User ManualFERNO Combi Head Immobiliser (CHI)FERNO/MAN/10/15/211/UK Stock Code 2003-0136DR AF TFERNO Combi Head Immobiliser© Copyright Ferno UK Ltd. All Rights Reserved.DisclaimerThis manual contains general instructions for the use, operation and care of this product. The instructions are not all-inclusive. Safe and proper use of this product is solely at the discretion of the user. Safety information is included as a service to the user. All other safety measures taken by the user should be within and under consideration of applicable regulations. It is recommended that training on the proper use of this product be provided before using this product in an actual situation.Retain this manual for future reference. Include it with the product in the event of transfer to new users. Additional free copies are available upon request from Ferno UK Customer Support department .Ferno Technical SupportCustomer service and product support are important aspects of each Ferno product.For technical support questions:Ferno UK Service Telephone +44 (0) 1274 854511Ferno UK Service Fax+44 (0) 1274 855511*********************.ukFerno Head OfficeFor ordering assistance or general information contact Ferno Customer Support on :FERNO UKTelephone +44 (0) 1274 851999Fax+44 (0) 1274 851111Website US HEADQUARTERSFerno-Washington, Inc.70 Weil WayWilmington, Ohio 45177-9371, U.S.A.Telephone +1.937.382.1451Fax +1.937.382.6569Website Proprietary NoticeThe information disclosed in this manual is the property of Ferno UK Ltd, who reserve all patent rights, proprietary design rights, manufacturing rights, reproduction use rights, and sales use rights thereto, and to any article disclosed therein except to the extent those rights are expressly granted to others or where not applicable to vendor proprietary parts.Limited Warranty StatementThe products sold by Ferno are covered by a limited warranty, which is printed on all Ferno invoices. The complete terms and conditions of the limited warranty, and the limitations of liability and disclaimers, are also available upon request by calling Ferno UK on +44 (0) 1274 851999.FERNO Combi Head ImmobiliserTABLE OF CONTENTSContact information __________________________21 - Safety Information __________________________41.0 Warning _______________________________41.1 Important ______________________________41.2 Blood Borne Disease Notice ________________42 - Operator Skills and Training __________________42.0 Skills __________________________________42.1 Training ________________________________43 - About the CHI ______________________________53.0 Description _____________________________53.1 General Specifications ____________________53.2 Components ____________________________54 - Operating the CHI ___________________________64.0 Before Placing the CHI in Service ____________64.1 General Guidelines for Use_________________64.2 Attaching the Baseplate to a Longboard ______64.3 Attaching the Baseplate to a Scoop® Stretcher _74.4 Securing the Patient in the CHI _____________84.5 Storing the CHI __________________________85 - Guidelines for using with Scoop ® EXL ___________95.0 Introduce b aseplate w hilst p atient i s o n t he fl oor _ 95.1 Locking of the Scoop®___________________9/105.2 Attaching the CHI head and chin straps ____10/115.3 Alternative method for attaching straps ______116 - Guidelines for using with Longboard _________126.0 Attaching the CHI baseplate straps _________126.1 Attaching the CHI baseplate top strap _______ 136.2 Attaching the CH I baseplate lower strap _147 - Maintenance _______________________________157.0 Maintenance Schedule __________________157.1 Disinfecting and cleaning the CHI __________ 157.2 Inspecting the CHI ______________________158. Limited Warranty Summary __________________169 - Ferno Technical Support ____________________1610 - T raining & M aintenance R ecord _______________17Section Page IllustrationsFigure 1 - CH I Components ______________________________5Figure 2 - Positioning the Baseplate _______________________6Figure 3 - Feeding the auxiliary strap through slots _________6Figure 4 - Securely fitted Baseplate _______________________6Figure 5 - Baseplate located on Scoop ® EXL ________________7Figure 6 - Applying the headblocks ________________________7Figure 7 - Orientation of headblocks _______________________7Figure 8 - Fitting H -straps to head and chin straps ___________7Figure 9 - Placing straps __________________________________8Figure 10 - Securing forehead strap ___________________________8Figure 11 - Anchoring chin strap _____________________________8Figure 12 - Make sure head is fully secure ______________________8Figure 13 - Holding the patient's head ________________________9 Figure 14 - Inserting baseplate under the head _______________9Figure 17 - Aligning the Scoop ® _____________________________9Figure 18 - Locking the foot-end of the Scoop ® _______________10Figure 19 - Positioning the headblocks _____________________10Figure 20 - Preparation of head-strap _______________________10 Figure 21 - Laying the head-straps in position ________________10Figure 22 - Anchoring the lower chin _______________________10Figure 23 - Fixing the head-strap ___________________________11Figure 24 - Ensuring the straps are tight ____________________11Figure 25- Attach the head-straps _________________________11Figure 26 - Insert the headblocks ___________________________11Figure 27 - Position the head-straps _________________________11Figure 28 - Secure the head -traps ___________________________11Figure 29 - Baseplate facing up ____________________________12Figure 30 - Baseplate facing down __________________________12Figure 31 - Thread the strap through both buckles _____________12Figure 32 - Feed the strap back through second buckle ________12Figure 33 - Securing the strap through both buckles __________12Figure 34 - Baseplate ready to attach to board ________________12Figure 35 - Positioning the straps ___________________________13Figure 36 - Threading the strap ____________________________13Figure 37 - Securing the strap ______________________________13Figure 38 - Feed the strap back through the buckle ____________13Figure 39 - Pull the strap tight ______________________________13Figure 40 - Secure the strap to the VELCRO® ___________________13Figure 41 - Positioning the straps __________________________14 Figure 42 - Inserting the strap into the buckle ________________14Figure 43 - Securing the strap _____________________________14Figure 44 - Feed the strap back through the board __________14Figure 45 - Securing the left strap _________________________14Figure 46 - Securing the right strap ________________________14Figure 47 - Baseplate secured to the longboard _____________ 15Figure 48 - CH I secured to the longboard ___________________15FERNO Combi Head Immobiliser1 - SAFETY INFORMATION1.0 WarningWarning notices indicate a potentially hazardous situation which, if not avoided, could result in injury or death.1.1 Important1.2 Blood borne Disease NoticeTo reduce the risk of exposure to blood borne diseases such as HIV-1 and hepatitis when using the CHI, follow the disinfecting and cleaning instructions in this manual.Safety Information 2 - OPERATOR SKILLS AND TRAINING2.0 SkillsOperators using the CHI need:● A working knowledge of emergency patient-handling procedures.● The ability to assist the patient.● A complete understanding of the procedures described in this manual.●Qualified to carry out spinal immobilisation2.1 TrainingTrainees need to:● H ave followed a training plan approved by an EMS training officer (or equivalent).● Read and understand the instructions in this manual.● Practice using the CH I before using it in regular service.● Be tested to verify their understanding of the CHI's use and care.●Keep training records. A sample training sheet is provided on page 17.Important notices emphasise important usage or maintenance information.ImportantFERNO Combi Head Immobiliser 3 - ABOUT THE CHIAbout the Immobiliser3.0 Head Immobiliser DescriptionThe Ferno Combi H ead Immobiliser (called the 'CH I" in this manual) is an emergency patient-handling device designed to aid in immobilising the patient's head and neck. It is for professional use only, by a minimum of two trained operators.The CH I is made from integral foam polyurethane and is waterproof and buoyant. It is designed not to interfere with medical scanners and may be left in place during X-ray, CT and MRI scans.The CHI is specifically designed for use with a Ferno Scoop® EXL but can also be used on a Scoop® S-265/266 and any breakaway stretcher or full-length longboard / spineboard that has either cervical device slots or a centre hole at the head end.The CHI features include:• 1 x Baseplate with fixing straps • 2 x Headblocks• 2 x Forehead/Chin straps•2 x Easy-to use hook-and-loop fastening H-straps3.1 General SpecificationsLength______________________24.5 cm (9.7 in)Width______________________ 30 cm (11.8 in)Height______________________17 cm (6.6 in)Weight______________________2.32 kg (5 lb)General specifications are rounded to the nearest whole number. Metric conversions are calculated before rounding the imperial measurements. For more information, contact Ferno Service Department.Ferno reserves the right to change the specification without notice.3.2 ComponentsFigure 1 - CHI ComponentsBaseplate with fixing buckleUpper fixing strap for longboardLonger fixing strap for LongboardHeadblocks (2)Easy-to use hook-and-loop fastening H straps (2)Forehead/chin straps (2)FERNO Combi Head Immobiliser4.0 Before Placing the CHI HeadImmobiliser in service● Personnel who will work with the CHI need to readthis manual.●Inspect the CHI, following instructions inInspecting the CHI, page 15.4.1 General Guidelines for Use•Qualified personnel should assess the patient's condition and determine the proper procedures and equipment to use.• Follow standard local emergency patient-handling procedures when using the CHI.• Using the CH I requires a minimum of two trained operators working together.• Stay with the patient at all times.•Medical advice is beyond the parameters of this manual. It is the users' responsibility to ensure safe practices for the patient and themselves.Using the Immobiliser4.2 Attaching the Baseplate toa LongboardNote: When using a longboard, you must use a full-length Longboard with the CHI. The Longboard must have both a centre hole and slots along the side of the board to accommodate the fixing straps.CHI is suitable for use with Ferno Millennia board and all versions of Najo board and bariatric Sportsboard 1. Separate the components of the CHI.2. Position the Baseplate just below the centre hole withthe VELCRO® facing upwards on the fixing strap at the head end of the Longboard, feeding the strap through the buckle and back round to attach on itself (Figure 2). See also section 6 for more details.3. Further attach the Baseplate to the Longboard usingthe auxiliary strap (Figure 3). Feed the auxiliary strap through the slots in the side of the stretcher and back round, attaching the strap with the VELCRO®. See section 6 for more details. Note that the Baseplate may be stored in vehicle attached to the Longboard, to reduce time spent deploying the CHI.4. Verify that the Baseplate is firmly in place such thatit does not slip on the Longboard, by tightening the VELCRO® straps at each point.5. Transfer the patient onto the Longboard usingapproved local manual handing and patient transfer procedures.ImportantThe Baseplate must be tight on the Longboard for the CHI to function effectively. If the Baseplate moves or slips, further tighten all retention straps until the Baseplate remains firmly in place.Figure 2 - Positioning the BaseplateFigure 3 - Feeding the auxiliary strap through slotsFigure 4 - Securely fitted BaseplateFERNO Combi Head Immobiliser 4.3 Deploying the Baseplate when using a Scoop® Stretcher1. Read and follow all instructions in the Scoop® StretcherUsers' Manual.2. Always transfer the patient onto the Scoop® stretcherusing approved local manual handing and patient transfer procedures.3. When using CH I with Scoop, the baseplate does notneed to be attached to the Scoop prior to deployment.4. The CH I baseplate can be introduced under thepatient's head either prior to introducing the Scoop® under the patient laid on the floor or at the same time as introducing the Scoop® by holding the baseplate within one half of the Scoop® as the Scoop® is introduced. Either method requires a minimum of two operators: one operator to support the patient's head and neck in neutral alignment at all times, the other operator applying the Baseplate and Scoop® separately, or at the same time. See section 5 for more detailsFigure 5 - Base Plate located on Scoop ® EXLFigure 6 - Applying the HeadblockFigure 7 - Orientation of HeadblocksFigure 8 - Fitting H-straps to head and chin strapsUsing the Immobiliser4 -OVERVIEW - USING THE CHIFERNO Combi Head Immobiliser4.4 Securing the Patient in the CHI1. Position the patient on the Longboard or Scoop®stretcher with the patients head centred on the baseplate. The patient's head should be held at all time.2. Secure the patient on the Longboard or Scoop®stretcher with the restraints provided with the equipment.3. If the patient is on a Longboard, place the verticalsides of the H eadblocks against each side of the patient's head. The end of each pad should touch the patient's shoulders.4. If the patient is on a Scoop® stretcher, place the angledside of the Headblocks against the patient's head (See figure 7 on page 7). The end of each pad should touch the patient's shoulders.Figure 10 - Securing forehead strapFigure 11 - Anchoring chin strapFigure 9 - Placing strapsFigure 12 - Make sure head is fully secure4.5 Storing the CHIClean and disinfect the CHI before storing (See Maintaining the CHI on page 15).The CHI Baseplate may be stored attached to a Longboard if desired.Store the remaining CHI parts together in a clean, secure location, or attached to a Longboard/Scoop®.4 - OVERVIEW - USING THE CHIWhen possible, align the holes in the Headblocks with the patient's ears. This helps the patient hear the operator and allows the operator to check the patient's ears.1. Follow local protocols to determine the use andplacement of a strap in the chin area (with or without use of a neck brace).2. Begin by anchoring the chin strap through the smallercervical device slots on the Longboard/Scoop®. Loop each end of the straps through the cervical device slots on the Longboard/Scoop®. Adjust as needed.3. Centre a forehead/chin strap on the patient's forehead,with the fastening strips facing up. Loop each end of the straps through the cervical device slots on the Longboard/Scoop®. Adjust as needed.4. See section 5 for more details on attaching the strapsUsing the ImmobiliserFERNO Combi Head Immobiliser 5 - SUGGESTED PROCEDURES FOR USING CHIIN CONJUNCTION WITH SCOOP ® EXL5.0 Introduce baseplate whilst patient is on the floor1. With patient on the floor, Operator 1 supports patient’s head for C-spine neutral alignment (see fig 13)2. Whilst Operator 1 maintains this position, Operator 2 introduces the baseplate under the patient’s head from the side, ensuring the patient’s head is central on the baseplate. (See fig 14)3. With Operator 1 continuing to maintain neutral alignment, Operator 2 places the two sectionsof the Scoop® either side of the patient. (see fig 15)Figure 13 - Holding the patient's headFigure 14 - Inserting baseplate under the headFigure 15 - Manoeuvring the Scoop ® in position5.1 Locking of the Scoop ®1. Operator 2 brings both sides of the Scoop® together, bringing the Scoop® torso panels under the baseplate at each side, locking the Scoop® in place, as Operator 1 continues to hold patient’s head. (see fig 16 & 17)2.Operator 2 locks the Scoop® at the foot-end (see fig 18 on next page)Figure 16 - Locking the head-endFigure 17 - Aliening the Scoop ®N.B. on certain surfaces it may be easier to lock the Scoop ® at foot-end first and then close the head-endUsing the ImmobiliserFERNO Combi Head Immobiliser4. Once the Scoop® is locked, place a head-block at each side of the patient, ensuring the angled side of each block isfacing the patient’s head (fig 19)Figure 19 - Positioning the head-blocksFigure 20 - Preparation of head strap orientationN.B It is not necessary to attach the baseplate to the Scoop ® at the top buckle, as this is intended purely for use on witha longboard board such as the Millennia board, where the CHI base can be strapped to the board and stored in the vehicle with the baseplate attached permanently.5 - SUGGESTED PROCEDURES FOR USING CHI IN CONJUNCTION WITH SCOOP ® EXL (CONT...)5.2 Attaching CHI head & chin straps1. Ensure that the straps are prepared with the correct orientation & fixing of the straps (fig 20)2. Lay the straps over the CHI (see fig 21)3. First anchor the lower (chin) strap to the Scoop® on both sides (see fig 22)4. Then fix the forehead strap to the Scoop® (see fig 23 next page)5. Re-adjust the straps all around so that a tightpackage is achieved (see fig 24 next page)Figure 22 - Anchoring the lower chinUsing the ImmobiliserFigure 18 - Locking the foot-end of the Scoop®Figure 21 - Laying the head straps in positionFERNO Combi Head ImmobiliserFigure 23 - Fixing the head strapsFigure 24 - Ensuring the straps are tightFigure 25 - Pre-attach the head strap to the Scoop®Figure 26 - Locate the head blocks5 - SUGGESTED PROCEDURES FOR USING CHI IN CONJUNCTION WITH SCOOP ® EXL (CONT...)5.3 Alternative method for attaching straps to Scoop®Figure 27 - Position the head strap over patient head Figure 28 - Secure the head straps the other sideUsing the ImmobiliserFERNO Combi Head Immobiliser6 - SUGGESTED PROCEDURES FOR USING CHIIN CONJUNCTION WITH LONGBOARD6.0 Attaching CHI baseplate on LongboardThe CHI baseplate can be permanently attached to a longboard and stored in the vehicle, such that it is immediately readyto use when required.Figure 29 - Baseplate facing up Figure 30 - Baseplate facing down1.Attach the top-fixing strap as per photos below.Note that the baseplate is turned upside down in the sequence of photos. The photos have been taken in this way tomore easily show exactly how the top strap is attached to the buckle.Figure 31 - Thread the strap through rear buckle holeFigure 32 - Feed the strap back through front buckle holeFigure 33 - Secure the strap through both bucklesthrough theVELCRO®Figure 34 - Baseplate ready to attach to longboardUsing the ImmobiliserFERNO Combi Head Immobiliser6 - SUGGESTED PROCEDURES FOR USING CHI IN CONJUNCTION WITH LONGBOARD (CONT.)6.1 Attaching CHI baseplate top strap to the LongboardAttach the baseplate top-strap to the longboard as per below photosFigure 35 - Position the top strapFigure 36 - Thread the strap through board holeFigure 37 - Bring the strap back over the boardFigure 38 - Feed the strap back through the top buckle holeFigure 39 - Pull the strap tightFigure 40 -Secure the strap back over onto theVELCRO®Using the ImmobiliserFERNO Combi Head Immobiliser6 - SUGGESTED PROCEDURES FOR USING CHI IN CONJUNCTION WITH LONGBOARD (CONT.)6.2 Attaching CHI baseplate lower fixing strap to the longboardAttach the lower fixing strap to the board as follows:Figure 41 - Position the strapsFigure 42 - Insert the strap into the front buckle holeand back under to fix to the VELCRO® underneathFigure 43 - Securing the strapFigure 44 - Feed the lateral strap through the board holeFigure 45 - Securing the left strapFigure 46 -Securing the right strapUsing the ImmobiliserFERNO Combi Head Immobiliser7 - MAINTENANCE7.0 Maintenance ScheduleThe CHI requires regular maintenance. Set up and follow a maintenance schedule. A sample maintenance record sheet is provided on page 17. The table on the right represents minimum intervals for maintenance.When using maintenance products, follow the manufacturers directions and read the manufacturers' material safety data sheets.7.1 Disinfecting and Cleaning the CHITo disinfect: Wipe all surfaces with disinfectant. Follow disinfectant manufacturer's directions. Ferno recommends inspecting the CHI for obvious damage as you disinfect it.To clean: Hand wash all parts of the CHI with warm water and mild detergent. Rinse with warm, clear water. Dry the CHI with a towel or allow it to air-dry.MinimumMaintenance IntervalsE a c h U s eA s N e e d e dE a c h M o n t hDisinfecting •Cleaning •Inspecting••ImportantDisinfectants and cleaners containing bleach, phenolics, or iodides can damage the mount. Use caution when disinfecting and cleaning with products containing these chemicals.7.2 Inspecting the CHIH ave your service's equipment maintenance personnel inspect the CH I. Follow the checklist on the right and work the CHI through all its functions as described in this manual.If the inspection shows damage, excessive wear, or missing parts, remove the CHI from service and replace it.INSPECTION CHECKLISTAre all components present?Are all components in good condition, free of punctures, tears and fraying?Does the Baseplate remain firmly in place (does not slip)when secured to the Longboard or Scoop® stretcher?Are the VELCRO® hook and loop fastening strips effective?Are all parts free of excessive wear?6 - SUGGESTED PROCEDURES FOR USING CHI IN CONJUNCTION WITH LONGBOARD (CONT.)Figure 47- Baseplate secured to the longboard Figure 48 - CHI secured to the longboardUsing the ImmobiliserWarrantyFERNO Combi Head Immobiliser8 - LIMITED WARRANTY SUMMARYFerno products are warranted to be free from defects in material and workmanship for a period of on year, except:• Soft goods (webbing, vinyl, fabric, foam, etc.) are warranted for 90 days.Ferno repairs are warranted for 90 days from the date of repair.This limited warranty applies only when the product is used as described in the instructions provided. The warranty period begins when the product is shipped from Ferno or when you receive it if you have proof of delivery. Shipping charges are not covered by this limited warranty. Ferno is not liable for shipping damages or damages sustained through using the product.Non-Ferno products sold by Ferno retain the product manufacturer’s original warranties. Ferno offers no warranties of any kind additional to those of the product manufacturer, nor does Ferno assume any liability for products manufactured by others.Limited Warranty ObligationIf a product is proven defective, Ferno will repair or replace it, or, at our option, refund the item’s purchase price. In no event is Ferno liable for more than the selling price of the product. The purchaser accepts these terms in lieu of all damages.This is a summary of the limited warranty. The actual terms and conditions of the limited warranty, and the limitationsof liability and disclaimers, are available upon request by calling Ferno UK on +44 (0) 1274 851999.9 - FERNO TECHNICAL SUPPORTCustomer service and product support are important aspects ofeach Ferno product. For assistance, please contact Ferno ServiceDepartment:FERNO (UK) LTDTelephone +44 (0) 1274 851999Fax +44 (0) 1274 851111Email **************.ukWebsite FERNO Combi Head Immobiliser TRAINING RECORDDateNameTraining MethodMAINTENANCE RECORDDateMaintenance PerformedBy10 - TRAINING AND MAINTENANCE RECORDSTraining & Maintenance。
1W elcome to the UNIT 1 familiy .Congrats!Y ou are among the first to ever experience F ARO.This embodies the work of creators, designers, engineers and entrepreneurs trying to build something unique. F ARO is our best shot at what an urban commuter helmet should be and our small input towards making the roads safer .Y ou are now a part of this story - you helped mak e this happen. W ear it with pride.IMPORT ANTPlease read this manual carefully before using your helmet.2Do not use the helmet in direct sunlight, or very warm places for a long period of time. This can damage the product and generate heat that can cause serious injuries. Do not leave the product near open flames. Do not dispose de product in a fire. This can damage the battery, explode or ignite and cause serious injury. Never charge the helmets battery with a flawed charger, it may cause an explosion oringition. Battery life may vary depending on conditions, environmental factors, usage, etc.Please note some countries require the use of regular cycling lights. If this is the case, F ARO may not replace them. Before using F ARO, mak e sure you comply with local laws and regulations.1. Safety information3 WARNINGF ARO was made for non-motorized recreational pedal cycling only. No helmet can prevent against allinjuries. Serious injury or death may occur while cycling even with a helmet. Unit 1 Gear, Inc. and/or its subsidiaries mak e no claim that this helmet will eliminate all posibilities of injury.Lights are a supplement (not a replacement) of regular mount ed bik e lights. Certain places hav e laws that require lights, comply with local regulations. T urn signals are supplements, not a replacement of hand signals.Unit 1 Gear, Inc. and/or its subsidiaries are not responsible f or any f ailure of communication resulting from turn signals or brak e lights. Lights are no guarant ee againts pre venting an accident or collision.When activating the turn signal, at glance the remote to ensure that you activated the correct turn signal.Activating the wrong turn signal can increase the risk of an accident. If using the turn signals in manualmode, always remember to turn off the signal once used.This hemet was not designed for motor vehicle use, neither for sporting. Everytime you use this helmetcheck if nothing is torn, worn, missing, or out of adjustment. This helmet should not be used by children.Y our helmet has a built-in battery. Be careful to follow all the safety guidelines.2. Package content 41. F ARO Helmet2. USB Type-C / T ype-A3. Navigationremote (optional)3. Overview 51.1 Front light / 1.2 MIPS liner (optional) / 1.3 Magnetic buckle / 1.4 Back light / 1.5 Hidden lights / 1.6 Power button / 1.7 Charging port / 1.8 Fitting system4. Fitting instructionsA correct fitted helmet should sit comfortably on your head without pressing or chafing and should not move foward to obscure your vision or reaward to expose your forehead. Please mak e sure the helmet is positioned the right way .Be sure to position the buckle under the chin and back against the throat. The straps should fit comfortably around your ears. T est these adjustments before every ride. 6How to wear your helmet F ARO has a great fit. Follow these instructions carefully to aply your helmet correctly . Consult us if you are not sure which features your helmet has.Adjust your bucklesT o lock the Magnetic buckles bring the two parts together until they snap. T o unlock them, slide them sideways as shown below. T o k eep the chinstrap from loosening or flapping, it must be tuck ed through the k eeper.Fitting systemTighten or loosen the Fitting system dial to fit the circumference of your head as required.785. Function guide UNIT 1 App By simply pairing your phone with your Bluetooth system, you can use the F ARO app for quick er , easier setup and management.Apple Store Google PlayDownload Android: Google Play Store > F ARO appiOS: App Store > F ARO app or scan the QR code below .Power on / off Press& hold the power button for 1 sec.9Action with power button Helmet functions overview - Press & hold the power button for 1 sec: Power On / Off- 4 taps: Helmet reset- 8 taps: Full factory reset (forgets app and remote)10Pull and turn the silicone lid. Then plug the USB-C cable into the charging port. Once plugged in the hidden lights will display the status of your battery using 6 levels. All 6 levels in a solid green color mean the battery is full. For safety purposes,F ARO functions are not avaliable while charging. DO NOT use the helmet while charging with a powerbank.Charging3.1.2.Pairing F ARO with the U1 App 1. Mak e sure your phone’s bluetooth connection is active.2. Power up your helmet3. Look for your helmet using the U1 App4.Pair directly from the U1 App11TroubleshootingIf you are having trouble with your helmet, follow these steps.Charge the helmet using the USB-C cable.Not powering onMak e sure your helmet is fully charged and your bluetooth connection is active.Not pairingReset the helmet by pressing the power button for 5 times.Helmet not respondingMak e sure the USB-C power source is switched on and plugged correctly .Not charging1. Power on your helmet (should be off before you begin)2. Press & hold any button on the Nav Remote (lights will blink left & right)3. W ait for connection. Helmet will show 3 green flashes when complete, Nav Remotewill also flash 3 times.6. Navigation remote12EN3.1 Navigation remote / 3.2 Dock / 3.3 Rubber pad / 3.4 Rubber bandInstallationA ttach the dock to your handlebar using 1 of the rubber bands included in the package. Do so by looping the band in the center of the dock as shown below . Place the remote on the dock and twist it clockwise to lock it into place.The navigation remote is an optional feature.3.43.33.23.11314Pairing your Navigation Remote1. Start with both Helmet & Nav Remote OFF and close to each other (Fig 1.)2. Power on your helmet3. Press & hold any button on the Nav Remote (lights will blink left & right) (Fig 2.)4. Helmet will show 3 green flashes when complete and Nav Remote will flash 3 times when connection is made (Fig 3.).5. Y our remote will stay paired to your helmet unless you replace it by another one or perform a factory reset of your helmet.Action with L&R buttonNavigation remote function overview - 1 tap (L or R):Turn signal Activation- hold 3 secs: System resetIf set on Automatic , turn signal will endautomatically after designated time If set on Manual , T urn Signal will end by tapping any button (L or R)Fig 1.Fig 2.Fig 3.15ENPull and turn the silicone lid. Then plug the USB-C cable into the charging port. Use the same cable than the helmet.ChargingTroubleshootingIf you are having trouble with your Navigation Remote, follow these steps.Not powering onCharge the remote using the USB-C cable.Not chargingMak e sure the USB-C power source isswitched on and plugged correctly . The LED indicator will display a slow pulse when charging.Not pairingMove the device closer to each other and away from any interference or obstruction.Mak e sure the helmet is not connected to another remote when entering pairing mode.Remote not respondingReset the remote by pressing & holdingeither button for 3 seconds.3.1.2.5. More aboult your helmetGeneral safetyNo helmet can protect the wearer against all posible impacts. A severe impact, sharp object,imporoper use, or incorrect adjustment could cause conditions beyond the protection of the helmet.T o be effective, a helmet must fit and be worn correctly. The helmet is designed to be retained by a strap under the lower jaw. T o check for correct fit, place the helmet on your head and mak e anyadjustments inducated. Securely fasten retention system. Grasp the helmet and try to rotate it to the front and rear. A correctly fitted helmet should be comfortable and should not move foward toobscure vision or reaward to expose the forehead. Failing to properly position the helmet can result in sereious injury to you or others.The helmet is designed to absorb shock by partial destruction of the shell and liner. This damagemay not be visible. Therefore, if subjected to a severe blow, the helmet should be destroyed andreplaced even if it appears undamaged. The helmet has a limited lifespan in use and should bereplaced when it shows obvious signs of wear. Helmets parts lose strength over time, so even if the helmet has not been impacted or damaged, replace it after three years.RegulatoryF ARO was designed to comply with most International Safety Certifications and meets C.P.S.C. 16 CFRPart 1203 United States Federal Safety Standard for Bicycle Helmets (Consumer Product SafetyCommission) and with the CE, EN1078:2012 +A1:2012 Helmets for pedal cyclists, Skateboarders or Rollerskaters (European Safety Standard).1617SPECIFICA TION OF RADIO TRANSMISSION FCC ST A TEMENTF AROF ARO Navigation Remote PRODUCT: F ARO_HELMET F ARO_REMOTE MODEL NUMBER: 2402 - 2480MHz 2402 - 2480MHz OPERA TING FREQUENC Y:DC 3.7V 1850mAHDC 3.7V 100mAHPOWER:The above product is in conformity with the PPE Regulation(EU) 2016/425 and is identical to the PPE which is subject of EU certificate (TBC) issued by ITS T esting services UK LtdThis device complies with Part 15 of the FCC Rules. Operation is subject to the following two conditions:(1) This device may not cause harmful interference, and(2) This device must accept any interference received, including interference that may cause undesired operation.W arning: Changes or modifications not expressly approved by the party responsible for compliance could void the user’s authority to operate the equipment.The above product is in conformity with the European Radio Equipment Directive (RED) (2014/53/EU) which is subject of EU certificate (TBC) issued by T eleficationY ou can find the declaration of conformity by the following links:Bluetooth LEMaximum Output Power: 0dBm EIRP A verage (Calculated)Maximum Antenna Gain: 1dBi www .unit1gear .com/EU_DoCNOTE: This equipment has been tested and found to comply with the limits for Class B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates uses and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:Reorient or relocate the receiving antenna.Increase the separation between the equipment and receiver.Connect the equipment into an outlet on a circuit different from that to which the reciver is connected.Consult the dealer or an experienced radio/TV technician for help.RF W ARNING ST A TEMENT:The device has been evaluated to meet general RF exposure requirement. The device can be used in portable exposure condition without restriction.-English:”This device complies with Industry Canada license-exempt RSS standard(s). Operation is subject to the following two conditions:(1) This device may not cause interference, and(2) This device must accept any interference, including interference that may cause undesired operation of the device.”18Helmet careStore your helmet in a dry place, away from excessive heat soulrces lik e radiators, automobile trunks or direct sunlight. Clean your helmet only using a slighty damp soft cloth or sponge.The helmet can be damaged using chemical cleaners, specialy petroleum base solvents.Replace your helmet if there is any sign or hint of damage, DO NOT use a damaged helmet. Using a damaged helmet or worn may result in more serious injuries in the event of a fall.Inner pads are removable and can me washed by hand with mild soap and water, rinsed and dried. The protection of this helmet may be severly reduced by the aplication of paint, adhesive stick ers and transfers, cleaning fluids, chemicals, and other solvents.Never remove or modify the original elements that constitute the helmet, or add any accesories not recommended by Unit 1 Gear, Inc., this may affect the protection given by the helmet.Store in a dry place, away from heat (for example, sunlight through a car window) .196. W arranty1 year limited warrantyUnit 1 Gear, Inc. warrants to the original purchaser of this product that the product is free of defects in material and workmanship for a period of (1) year from the original date of purchase. This warrantydoes not apply to defects of physical damage resulting from abuse, neglet, improper repair,improper fit, alterations, or use unintended by the manufacturer.If your F ARO is found to be defective in materials or workmanship within one year from the date of purchase, Unit 1 gear, Inc. will at its sole option either repair or replace the helmet free of charge. Unit1 Gear, Inc. does not warrant any helmet damaged due to heat or contact with solvents. Thiswarranty does not affect your statutory rights. This warranty is in lieu of all other agreements andwarranties, general or special, express or implied and no representative or person is authorized to assume liability on behalf of Unit 1 Gear, Inc. in connection with the sale or use of this product.This limited warranty only applies to products purchased directly from Unit 1 Gear, Inc. official stores or a Unit 1 Gear, Inc. authorized reseller.This limited warranty does not cover normal wear and tear.Unit 1 Gear, Inc. does not offer warranty regarding battery life used in F ARO. Battery life may varydepending on its configuration and use. Unit 1 Gear, Inc. does not guarantee or promise any specific level of performance or battery life associated with the use of its product or any feature in it.2021contact@unit1gear .comUnit 1 Gear , Inc.3411 Silverside Road, Rodney Building #104Wilmington. DE 19810USA.www .unit1gear .com/unit1news/u1gear/unit1gear。
Real-time Monitoring and Progress TrackingMarnix van der WolkSenior Account Manager, FARO TechnologiesApril 15, 2019Agenda1.Traceable Construction2.On-site Construction–BuildIT Construction–Core features of BuildIT Construction–ScanPlan for Construction BIM–Main features of ScanPlan3. Off-site Construction–Tracer SI–Applications of Tracer SIFARO Traceable Construction TMFARO Traceable Construction™On-Site ConstructionWhat is ?BuildIT Construction by FARO® is a construction verification software platform that enables AEC professionals to facilitate and accelerate validation to design specifications, tolerance evaluation with high accuracy, part positioning andbuilding monitoringContinuous Construction VerificationCore Analysis ToolsFARO ScanPlan TM is a lightweight, handheld mapper that enables AEC professionals to quickly and easily capture and visualize 2D floor plansFARO® ScanPlan TM = Fast 2D MappingWhat are the main features of the ScanPlan TM?✓Capture 2D floor plans as you walk✓Document critical details with photographs, text anddocuments and add to the plan✓Visualize the plan in real time on a smartphone(Android or iPhone)✓Map floor plans on multiple floors✓Portable and Lightweight – Hold it withone hand, walk and point to capture✓Register & Optimize directly on the device✓Export to PDF, SCENE2go, WebShare Cloud✓Includes FARO Zone 2D – easy to use 2D CADsoftwareApplications for ScanPlan TM in C-BIM2D As-Built DocumentationMonitor ConstructionProgressProject Planning forScan JobsFacility Management Real Estate MarketQuantity Estimation forQuotation Construction ProjectManagementPre-planning of scanpositions Quotation of scan jobs Scan localizationMain TaskUsed forConceptual DesignDocumentation Export Import•2D map as image reference in the CAD file•2D vector linesUseable in any CAD system for further modelling•Add panoramic images with correct position and orientation to the floor plan•Export as VR Suite projectResult is a localized visual VR documentation of the as-built situationAdding Images + 360° Images to 2D mapDocumentationExportIntegrated Pano Image ViewerWorkflows for ScanPlanTM in C-BIMMonitor ConstructionProgressUpload•The 2D overview map is augmented with 360 degree pictures •POI can be marked in the 2D plan and augmented with •Image, video, audio, file annotations •Descriptions•Dataset is streamed/uploaded to WebShare / SCENE2goResult is a localized visual documentation of the construction progress on a daily/weekly base.Adding Images + 360° Images to 2D maphttps:///?v=om&t=p:defaul t,c:overviewmap,m:t&om=om1&om1=x:3.820,y:0.510,zoom :1&p=basement-floor-1Workflows for ScanPlanTM in C-BIM Scan AssistAfter the recording of a 2D floor plan, the systemcalculates automatically the best positions to place aFocus 3D scanner:•Estimate Scan Project Effort•Use ScanPlan to navigate to next scan position Project Planning for Scan JobsAutomatic definition ofScan positionsOptional: Scan Localizer functionality•Navigate with ScanPlan to a pre-planned scanposition and send this position to the Focus 3Dscanner•Scans are already pre-positioned after importinto SCENE; no need for Top-View registrationbefore C2C registrationKey Benefits of the ScanPlan TMSaves TimeDocument more buildings in less time. Walk and point the ScanPlan at the walls to capture nearly 29,000 points/secWhat will customers be most excited about?TM Easy to UseUse the familiar interface of a smartphone app to control itComplete SolutionExport results directly to PDF, SCENE 2go or WebShare Cloud or use FARO Zone 2D to finalize the floor plan by adding doors, stairs, notes, dimensions, and more.Confidence in the ResultsVisualize and save your projects using the smartphone app so you are sure you have mapped the entire building before youleave.Portable and LightweightOnly 1.5 kg (3.3 lb.), easily carried withone hand.Off-Site ConstructionApril 15, 2019Streamlining Production and AssemblyTracerSI represents a first-of-its-kind advanced laser imager and high-accuracy projection system, with superior scanning capabilities throughout its entire projection volume. The combination of high-contrast imaging, accurate and repeatable projection, and powerful yet easy-to-use BuildIT Projector software establishes a new industry standard for repeatable laser-guided assembly.The C-BIM vision for projecting devicesFARO technology will be used in workshops to present BIM design content, helping tradesmen easily assembling the deliverableswithout construction drawings.This process will be faster than actual workflows, reducing project costs by avoiding template creation and rework, minimizing material costs leading to higher quality outputs.Off-Site Construction – Applications Digital Design Transfer To WorkbenchSteel ProductionAssembly Layout - Trusses, Joists, Girders, Complex AssembliesSteel ProductionAssembly Layout - Trusses, Joists, Girders, Complex AssembliesAssembly Layout - Trusses, Roofs, Walls, Slabs Layout steps - Individual Beam Positions, Connector material Saved time by – Accurate Angles & PositionsFEATURES BENEFITSReplace Templates & Manual Instructions / Blueprints Cost and capital expenditure savings versus building, storing & maintaining physical templates and toolingUniversal Sequencing Tool •Brings all operators up to a higher skill &knowledge base•Ensures proper sequences are followed•Reduces legacy knowledge dependencyAll Work Instructions are Digital •Ensures that only the proper/current ECO’s orwork package instructions are utilized•Reduces scrap and rework•Improves quality and throughput to minimizerejects and non-conformancesReduce:- Layout / setup time- Defects / scrap- Labor / staff hours- Costly re-work time Multiple cost and time savings elements: •Fast setup•No need to reconfigure tooling work cells •Move immediately from CAD model to virtual template on the production floorTracer SI - Features and Benefits / CommercialThank youApril 15, 2019。
CaracterísticasLigero y móvil 17.5 kg (38.5 lbs)•Permite recorrer áreas interiores con menos volumen•Ideal para realizar recorridos rápidos o escaneos detalladosAutomatización innovadora•Elimina los pasos de procesamiento manual•Combina varias tecnologías líderes, que incluyen el FARO Focus Laser Scanner patentadoVelocidad vs. Exactitud•Los trabajos de captura as-built que tomaban, por ejemplo,una hora o más con escaneos láser 3D fijos se pueden lograr en aproximadamente 6 minutos con Swift •Proporciona precisión 3D de 2 a 10 mm•Escanea hasta 1 millón de puntos por segundo mediante dispositivos móviles y 2 millones mediante dispositivos fijosTemperaturas de funcionamiento•Diseñado para un amplio rango de condiciones térmicas,desde 5 a 40 °C•Funciona en temperaturas de hasta -10 °C•Se puede almacenar a temperaturas de hasta 60 °C, aunque se recomienda una temperatura de 25 °CCompatibilidad con diversos software•Compatible con FARO As-Built ™ , BuildIT Construction y WebShare Cloud•Es posible realizar importaciones directamente a cualquier sistema CAD con capacidades de nube de puntos 3D•Simplifica el flujo de trabajo de modelado con procesos automatizados •Optimiza el flujo de trabajo de escaneo a BIMDiseño intuitivo•Manijas cómodas con botones para una operación simple•El diseño ligero permite una fácil movilidad y configuración donde sea necesario•Ofrece versatilidad para usarse en fábricas, edificios de oficinas,hospitales y másPotentes opciones de salida•Exporta puntos de escaneo•Compatible con los formatos de archivo ASTEM 57, LAS, XYZFuncionamiento mejorado de la batería•Dos horas con una batería interna•El tiempo de funcionamiento se puede extender usando paquetes de baterías adicionales•Operación continua sin cables ni fuente de alimentación externaSwift es rápido y capaz de capturar áreas grandes y complejas en tan solo 10 minutos. Además de ser el sistema de escaneo láser 3D móvil más preciso para áreas grandes, también puede realizar escaneos fijos con un nivel de detalle excelente.Swift es un dispositivo liviano y altamente portátil que ofrece una versatilidad incomparable. Además, combina el FARO Focus Laser Scanner con un FARO ScanPlan 2D Mapper y el revolucionario software de escáner láser móvil FARO SCENE. Swift no solo proporciona a los usuarios un sistema de escaneo láser 3D móvil superior, la opción fija permite a los usuarios contar con la reconocida precisión del FARO Focus cuando se requiera claridad y exactitud. Swift es intuitivo y fácil de usar, ideal para realizar escaneos en interiores de fábricas, edificios de oficinas, hospitales y tiendas de venta minorista, ya que es compacto y se puede transportar en dos maletas pequeñas. El trípode de fibra de carbono y el vehículo de 3 ruedas se puede plegar fácilmente para transportarlo. Su interfaz de usuario es compatible para ejecutarse en cualquier dispositivo móvil, por lo que los operarios tienen conocimiento en tiempo real de cuánto trabajo se ha completado.Swift es un producto de vanguardia que permite a los profesionales de AEC tomar decisiones basadas en información que aumentan la productividad y reducen la ineficacia. Es ideal para grandes empresas de construcción, contratistas generales y gerentes de plantas e instalaciones. Además, Swift es perfecto para los proveedores de servicios de escaneo que requieren generar documentación de construcciones y modelos as-built más precisos, al tiempo que garantizan el control de calidad de la construcción.El nuevo FARO ® Swift es el primer sistema de mapeo móvil para interiores completamente integrado y está diseñado para realizar tareas de captura as-built en áreas grandes con un tiempo y esfuerzo mínimos. Swift es una extensión de los reconocidos FARO Focus 3D Laser Scanners que proporciona las mediciones más precisas siempre que se necesitan, para brindar mejores datos de forma más rápida.BeneficiosIncremento de la productividad•Permite que los operadores de mapeo móvil trabajen de forma más rápida e inteligente, ya que proporciona escaneos de mejor calidad y reduce enormemente el tiempo en la escena y que se destina al procesamiento •Incrementa la productividad, ya que captura los datos as-built 3D mientras el operario camina por una construcción •Fácil de aprender y de usar mediante la guía para usuarios de FAROMejora en la eficacia•No se compromete la máxima precisión y calidad de los datos gracias a la combinación de la captura de datos móvil con el escaneo láser fijo en un mismo dispositivo•Complete escaneos de áreas grandes y complejas en tan solo 10 minutos•Proporciona precisión 3D de 2 a 10 mmMejora en la calidad y confiabilidad•Permite que los usuarios aventajen a la competencia con un producto de mejor calidad y completamente integrado con el ecosistema de productos y software de FARO •El avanzado dispositivo de mapeo móvil brinda un rendimiento incomparable •Probado en condiciones extremas para garantizar la confiabilidad en entornos industriales desafiantes Maximización del ROI•Expande las posibilidades de los FARO Focus Laser Scanners para usarse en más aplicaciones•Dispositivo intuitivo y fácil de usar, con una curva de aprendizaje mínima•Garantía excepcional, bajos costos de mantenimiento•Cambie entre el modo de escaneo móvil o fijo para abarcar un área más grande o capturar más detalles1 Para la dispersión lambertiana, se usó Focus S 350 o Focus S Plus 3502Para los escaneos fijos, el rango de ruido se define como la desviación estándar de los valores con respecto al plano mejor adaptado para la velocidad de medición de 122 000 puntos/seg. 3En un ambiente interior controlado 4Según el ambiente escaneado 5Incluye el carrito, el trípode y los montajes de Swift, el Focus S Scanner y ScanPlan 6Temperatura baja de funcionamiento: Los dispositivos deben encenderse cuando la temperatura interna sea mayor a los 15 °C 7El almacenamiento extendido a temperaturas mayores a 40 °C puede afectar el rendimiento y la duración de la batería. 8Con FARO SCENELa precisión depende de la eficacia del algoritmo de registro SLAM, la cual puede ser afectada por la geometría del entorno capturado. Los trayectos extensos sin cierres, los cruces y las diferentescondiciones, como corredores estrechos o la presencia de ventanas o paredes de vidrio, pueden afectar la precisión. Si busca más información, consulte la hoja técnica de los escáneres Focus S /Focus S Plus y ScanPlan. Todas las especificaciones de precisión tienen una desviación de 1 sigma, se realizan después del calentamiento y dentro del rango de temperatura de funcionamiento, a menos que se especifique lo contrario. Sujeto a cambios sin aviso previo. Swift solo está disponible para los escáneres Focus S y Focus S Plus, requiere ScanPlan, accesorios y licencias adicionales de FW/SW, requiere SCENE versión 2020o posteriores y el firmware 6.6 o posterior de Focus.。