运动微分方程
- 格式:doc
- 大小:289.97 KB
- 文档页数:5
刚体平面运动微分方程
一般来说,物体运动过程中都受到各种力的作用,此外,如果是连续体,由于运动而产生的声学变化也都会影响运动状态,因此就需要研究物体运动中力和声学变化之间的关系。
在力学分析中,相对论块集体动力学(Classical Dynamics)是最基本的物理系统,它描述了物体运动的微分方程,从而可以求出物体的运动状态。
平面运动动力学是指物体运动过程中的动力学分析,可以用来描述物体在平面上的运动状态,包括具体的位置、速度、加速度等。
可以使用牛顿第二定律将机械力和物体加速度联系起来,写成机械力和物体加速度的微分方程,它的形式为:
F=m·a,
其中F表示机械力,m表示物体的质量,a表示物体的加速度。
物体在平面上的运动还会受到一些拖拽力的影响,比如阻力和空气阻力等,如果将拖拽力也考虑在内,则可以将上述方程修正为:
其中b表示拖拽力,v表示物体运动状态时的速度。
此外,如果物体处于受到旋转力作用的情况下,则可以将其表述为:
F=m·a+b·v+c·(ω×r),
其中c表示旋转抗力,ω表示旋转角速度,r表示物体圆心到物体某一点的距离。
由此可以得到物体平面运动的微分方程:
其中Δp表示物体加速度变化,F表示物体受到机械及其拖拽力和旋转抗力的作用。
从而可以根据上述微分方程,求出物体在平面上运动过程中的状态和性质,从而又可以了解物体在机械及其拖拽力和旋转抗力作用下,在平面上的运行状态。

质点运动微分方程
质点运动微分方程是描述质点在运动中位置、速度和加速度之间关系的微分方程。
根据牛顿第二定律,质点的加速度与作用在质点上的合力成正比,与质点的质量成反比。
因此,可以得到质点的运动微分方程为 F = ma,即 F(x(t), v(t), t) = m * v'(t),其中 F表示作用在质点上的合力,m表示质点的质量,v(t)表示质点的速度,x(t)表示质点的位移。
解决质点运动微分方程可以得到质点的速度和位移的函数表达式,从而可以进一步分析质点的运动规律和特性。
质点运动微分方程在物理学、工程学等领域中有广泛应用,例如在运动学、力学、电学、热学等方面,都需要使用微分方程来研究质点的运动。
- 1 -。
简谐运动微分方程推导
简谐运动是物理学中非常重要的一个概念,它描述了一种周期性的运动,如振动和波动等。
在数学上,简谐运动可以用微分方程来描述。
本文将介绍简谐运动微分方程的推导过程。
首先,我们需要了解简谐运动的定义。
一个物体进行简谐运动时,它的位移x可以表示为:
x = A sin(ωt + φ)
其中,A是振幅,ω是角频率,t是时间,φ是相位常数。
简谐运动的周期T等于2π/ω,频率f等于ω/2π。
我们现在要推导简谐运动的微分方程。
根据牛顿第二定律,物体的加速度a等于力F除以质量m:
a = F / m
对于简谐运动,力可以表示为弹性力和阻尼力的合力:
F = -kx - bv
其中,k是弹性系数,b是阻尼系数,v是速度。
我们可以通过对位移和速度的一阶导数进行求解,得到简谐运动的微分方程:
x'' + (k/m) x= 0
这个微分方程也可以表示为:
x'' + ωx = 0
其中,ω=k/m是简谐运动的角频率的平方。
这个微分方程描述了一个在没有外力作用下的简谐运动。
如果加入阻尼或强制外力,微分方程将会有所不同。
总之,简谐运动微分方程是描述简谐运动的重要数学工具。
通过推导,我们可以更好地理解简谐运动的本质。
汽车滑行运动微分方程
汽车滑行运动的微分方程可以用牛顿第二定律来描述。
假设汽车在水平面上滑行,则可以将分析限定在水平方向上。
设汽车的质量为m,滑行时的摩擦力为Ff,滑行时的合外力
为F。
根据牛顿第二定律,滑行时的合外力F等于质量乘以加速度a,即F = ma。
考虑到滑行是在水平面上进行的,滑行时的合外力只有两个分量:摩擦力Ff和驱动力Fd(如果有)。
由于滑行时为减速运动,所以驱动力的方向与摩擦力的方向相反(有时滑行时的驱动力可忽略不计)。
则滑行时的合外力可以表示为F = Ff - Fd。
根据滑行过程中摩擦力的定义,摩擦力Ff与滑行时的速度v
有关,通常可以表示为Ff = -kv(其中k为常数)。
将以上式子代入F = ma中,得到ma = -kv - Fd,即
ma + kv + Fd = 0。
这就是汽车滑行运动的微分方程,其中a为汽车的加速度,v
为汽车的速度,m为汽车的质量,k为描述摩擦力与速度关系
的常数,Fd为驱动力的大小。
(注:此方程为一阶线性常微
分方程,可通过常微分方程的方法求解。
)。
简谐运动微分方程推导
简谐运动是物理学中的一个重要概念,它可以用微分方程来描述。
本文将介绍如何推导简谐运动的微分方程。
首先,我们需要了解简谐运动的定义。
简谐运动是指物体在一个固定轴线周围做往返运动的现象,其运动状态可用一个正弦或余弦函数来描述。
我们可以用以下方程式来表示:
x = A cos(ωt + φ)
其中,x表示物体的位移,A表示振幅,ω表示角频率,t表示
时间,φ表示初相位。
接着,我们需要对这个方程进行求导。
首先对cos函数求导得到: -d(sin(ωt + φ))/dt
然后根据链式法则,对内部函数ωt + φ求导得到:
-ωsin(ωt + φ)
将其代入原方程中得到:
dx/dt = -Aωsin(ωt + φ)
接着,我们可以对上述方程进行二次求导,得到加速度的微分方程:
d^2x/dt^2 = -Aω^2cos(ωt + φ)
这个微分方程就是简谐运动的微分方程,它描述了物体在简谐运动中的加速度随时间变化的规律。
通过求解这个微分方程,我们可以得到物体在简谐运动中的位移随时间变化的规律,进一步了解简谐运动的特性。
综上所述,简谐运动的微分方程可以通过对简谐运动的位移方程进行二次求导得到。
这个微分方程描述了物体在简谐运动中的加速度随时间变化的规律,是研究简谐运动的重要工具。
牛顿运动定律微分方程一、引言牛顿运动定律是描述物体在力作用下运动规律的基本定律,而微分方程则是数学工具中描述变化和关系的重要方法之一。
本文将结合牛顿运动定律,探讨其微分方程形式及其应用。
二、牛顿运动定律回顾牛顿运动定律是牛顿力学的核心内容,包括三个定律:1. 第一定律,也称为惯性定律,指出物体在没有外力作用时保持匀速直线运动或静止状态。
2. 第二定律,也称为运动定律,表明物体受到的力与其加速度成正比,且与物体的质量成反比。
3. 第三定律,也称为作用-反作用定律,指出两个物体之间的相互作用力大小相等、方向相反。
三、牛顿运动定律的微分方程形式根据牛顿运动定律可推导出微分方程形式,以描述物体在力作用下的运动。
1. 对于一维运动,根据第二定律可得到:F = ma = m(dv/dt),其中F为作用在物体上的力,m为物体的质量,a为物体的加速度,v为物体的速度,t为时间。
该方程可以进一步变换为:F = m(d^2x/dt^2),其中x为物体的位移。
这是物体在一维情况下的牛顿运动定律微分方程形式。
2. 对于二维或三维运动,可将物体的运动分解为各个方向上的独立运动,并分别应用牛顿运动定律得到相应的微分方程。
四、牛顿运动定律微分方程的应用牛顿运动定律微分方程在物理学和工程学中有广泛的应用,以下是几个常见的应用领域:1. 力学研究:通过解牛顿运动定律微分方程,可以研究物体在不同力作用下的运动规律,例如自由落体、抛体运动等。
2. 振动系统:振动系统中的物体受到弹簧力或重力的作用,可以通过牛顿运动定律微分方程描述其振动过程,如简谐振动、受阻尼力作用的振动等。
3. 电路分析:电路中的元件受到电压和电流的作用,可以通过牛顿运动定律微分方程描述电路中元件的响应,如电感、电容和电阻等元件的电流和电压关系。
4. 控制系统:控制系统中的物体受到外部控制力的作用,可以通过牛顿运动定律微分方程描述其动态响应,如机械控制系统、自动驾驶系统等。
双摆运动微分方程
双摆(Pendulum)运动是物理学中常见的实验装置,它能研究各种物理学现象,如重力、势能、动能转换等。
双摆运动由微积分方程来描述,这些微积分方程也被称作“双摆方程”。
双摆运动微分方程说明了双摆运动的横坐标随时间的变化,是由物理学家研究双摆运动的工具。
双摆运动的微分方程可以用数学语言描述,它可以表示为:“双摆运动的横坐
标(x)随时间(t)的变化情况,可以用微分方程dx/dt=f(x)来表示,其中f (x)表示了横坐标x随时间t的变化率。
而具体的形式可以写成x˙˙+g/l*sin (x)=0,这是双摆方程。
其中,l 代表钟摆的黎曼长度,g 代表重力加速度。
”
双摆运动的微分方程描述了双摆运动的运动规律,可以被用来研究双摆运动的
物理学行为。
双摆的位置可以用横坐标x来表示, //**横坐标的变化就是自变量,而物体**/受到的力就是因变量,由此可以用微分方程来描述。
微分方程可以用数值解法和解析解法来解决,数值解法即将积分方程近似分解,以步长求解;而解析解法则依赖于函数形式,或使用特殊函数求解,这两种方法都可以求得双摆运动的解析解。
在物理学现象中,微分方程用来描述双摆运动的运动规律是极其重要的,它的
解可以得出运动的速度、位移和势能,甚至可以分析双摆在重力场中的特殊性质。
此外,由双摆方程可以分析出双摆运动在加入外力等介质作用时,随时间变化的横坐标变化情况,因而可以更深入地探究运动的本质。
总之,双摆运动微分方程是双摆运动的定义和研究重要的工具。
它可以让我们
分析双摆数学模型的特性,也可以深入探究双摆运动的物理科学本质,进而帮助我们理解这种复杂的动态运动。
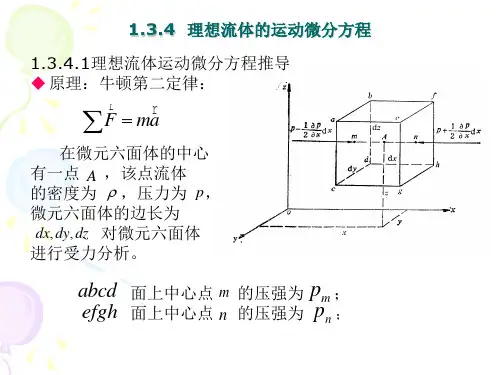
理想流体运动微分方程是一种描述理想流体运动的重要工具,它由许多参数组合而成,可以用来描述流体的位置、速度、压力和温度等物理量。
这种方程可以用于分析流体的运动,从而更好地理解流体的性质。
理想流体运动微分方程的主要参数包括动量方程、能量方程和物质守恒方程。
动量方程描述了流体的运动,即流体的加速度、动量和能量。
能量方程描述了流体的能量,即流体的温度、压力和功率。
物质守恒方程描述了物质的守恒,即流体中各种物质的变化。
理想流体运动微分方程在实际应用中非常重要,它可以用来分析流体的运动,从而对流体的性质有更深入的了解。
例如,它可以用来分析和计算流体的流量、速度、压力和温度等物理量。
它还可以用来研究和计算流体的热传导和热扩散等热力学性质。
此外,它还可以用于计算流体的流变性能,从而更好地了解流体的流变特性。
“让我们体会一下流体的美,让它们去探索它们的未知领域。
”——爱因斯坦理想流体运动微分方程在实际应用中可以用来分析和计算各种流体的运动特性,例如水、空气、液体和气体等。
例如,它可以用来计算气体的声速、空气的声压等。
它还可以用来研究和计算流体的粘性、密度、粘度等流变特性。
此外,它还可以用来研究流体的流动结构,比如涡旋结构、涡流结构等。
“每一个人都应该为自己的行为负责,而不是为自己的梦想负责。
”——马克思理想流体运动微分方程也可以用来研究和计算流体的结构性能,比如流体的抗压强度、稳定性和抗冲击性等。
它还可以用来研究流体的热物理性质,比如流体的温度场、压力场和温度分布等。
此外,它还可以用来研究流体的电磁特性,比如流体的电阻率、电导率和磁导率等。
“让我们一起探索未知的流体世界,让它们去发掘它们的奥秘!”——爱迪生理想流体运动微分方程对于科学家们来说是一种重要的研究工具,它可以帮助我们更好地理解流体的性质,从而更好地利用流体的物理量。
它可以用来分析流体的运动,从而更好地理解流体的动力学特性。
它还可以用来研究和计算流体的流变性能,从而更好地了解流体的流变特性。
三体运动微分方程三体运动是天体力学中的经典问题,其运动状态受到三个质点之间的万有引力相互作用力的影响。
三体运动的微分方程十分复杂,由于其几乎无法通过解析手段求解,因此需要采用数值方法进行求解。
本文将介绍三体运动微分方程的形式及其数值求解方法。
一、三体运动微分方程形式三体运动微分方程将三个质点的位置、速度和加速度表示为三个向量,分别为r1,r2, r3,v1, v2, v3,a1, a2, a3。
这些向量之间的关系由万有引力相互作用力Fij决定,其中i, j分别为1, 2, 3三个质点的编号。
三体运动微分方程的形式如下:d2r1/dt2 = G(m2(r2-r1)/|r2-r1|^3 + m3(r3-r1)/|r3-r1|^3)d2r2/dt2 = G(m1(r1-r2)/|r1-r2|^3 + m3(r3-r2)/|r3-r2|^3)d2r3/dt2 = G(m1(r1-r3)/|r1-r3|^3 + m2(r2-r3)/|r2-r3|^3)其中,G为万有引力常数,m1, m2, m3分别为三个质点的质量。
二、三体运动微分方程求解方法由于三体运动微分方程几乎无法通过解析手段求解,一般采用数值方法进行求解。
以下是三种常见的求解方法:1.欧拉法欧拉法是最简单的微分方程求解方法之一。
其基本思想是将微分方程中的导数用差分近似表示,将微分方程转化为差分方程进行求解。
欧拉法的缺点是精度较低,而且计算量大。
2.龙格库塔法龙格库塔法是一种较为精确的数值解法,它使用多阶迭代公式来计算微分方程的近似解。
相比于欧拉法,龙格库塔法具有更高的精度和更小的计算误差。
3.变步长法变步长法是一种基于步长自适应的求解方法,其优点在于可以根据微分方程的特性动态调整步长,以达到在精度和计算效率之间的平衡。
变步长法可以大大提高求解速度,同时也能保证求解的精确度。
三、总结三体运动微分方程是一个复杂的问题,其难度在于不能通过解析手段求解。
动力学方程描述物体运动的微分方程物体运动的动力学方程是描述物体在空间中随时间变化的力学规律的微分方程。
它是质点力学中最基本的方程之一,被广泛应用于物理学、工程学等领域。
本文将从物体运动的基本概念入手,详细介绍动力学方程的推导和应用。
一、物体运动的基本概念物体的运动可以通过位置、速度和加速度等物理量来描述。
其中,位置是物体相对于某个参考点的位置,速度是物体单位时间内位移的大小和方向,加速度是速度的变化率。
在动力学中,我们将物体的运动分为直线运动和曲线运动,分别对应于物体在一维空间和二维/三维空间中的运动。
二、动力学方程的推导根据牛顿第二定律,物体的加速度与作用于物体上的力之间存在着直接的关系。
在简单的情况下,我们可以将物体视为质点,假设不考虑空气阻力等因素,那么物体的动力学方程可以表示为:ma = ΣF其中,m为物体的质量,a为物体的加速度,ΣF表示物体受到的所有力的矢量和。
根据牛顿第三定律,作用于物体的力总是具有相等大小、方向相反的力对。
因此,我们可以将上式改写为:ma = F1 + F2 + ... + Fn其中,F1、F2、...、Fn为作用在物体上的各个力。
三、动力学方程的应用动力学方程可以用来解决物体在各种外力作用下的运动情况。
根据方程的形式不同,我们可以将其应用于不同的问题。
1. 直线运动对于物体在直线上的运动,可以将动力学方程简化为:ma = F1 + F2 + ... + Fn其中,物体的加速度和受到的力均为标量。
通过求解这个方程,我们可以得到物体在任意时间点上的位置、速度和加速度。
2. 简谐振动在弹簧振子等简谐振动系统中,物体的运动满足一定的周期性和规律性。
根据动力学方程,我们可以得到简谐振动方程:m(d²x/dt²) + kx = 0其中,m为物体的质量,k为弹簧的劲度系数,x为物体的位移。
通过求解这个方程,我们可以得到简谐振动的振幅、频率等特征量。
3. 曲线运动对于物体在二维/三维空间中的曲线运动,我们需要将动力学方程推广到矢量形式:ma = ΣF其中,a为物体的加速度,ΣF表示物体受到的所有力的矢量和。
运动微分方程弹性体体积V ,表面积S ,密度ρ,单位质量所受的体力为f,体力场为f(x,t),单位向量为n 的面元dS 的面力场为t(n,x,t),x 为原点到受力点的向量,t 为时间。
弹性体在t 时刻的动量P (t)dV v dt ddV f dS t dtdP F f V f m F dVf dS t F F F dVv m v p Vi Vi si ii Vi si i Vi i ⎰⎰⎰⎰⎰⎰=+=⨯=⨯=+=+===ρρρρρ动量定理合力弹性体动量体体面*******************************************************************************散度定理:散度定理是矢量场中体积分与面积分之间的一个转换。
⎰⎰∙=∙∇sVS d F dV F散度:表征矢量场A 产生的体积(三维)或面积(二维)的相对膨胀率,其表达式为▽·A 。
zRy Q x P R Q P z y x F ∂∂+∂∂+∂∂=∙∂∂∂∂∂∂=∙∇),,(),,( ,P,Q ,R 为F 在x,y,z 上的分量。
散度定理的证明:S d F dV F sV∙=∙∇⎰⎰⎰⎰⎰。
令()R Q P F ,,=,假设F =(0,0,R),则需要证明dS n R dV R sVz⎰⎰⎰⎰⎰∙=),0,0( 如下图,投影区为U。
dxdy y x z y x R y x zy x R dxdy dz R dV R Uy x Z y x Z zDz ))],(,,()),(,,([)(),(),(底顶顶底⎰⎰⎰⎰⎰⎰⎰⎰-==S=S 底+S 顶+S 侧面令S 底=S1,S 顶=S2,S 侧面=S3. 对于顶面,则dxdy yZ x Z dS n )1,,(22∂∂-∂∂-=Rdxdy dxdy y Z x Z R dS n R =∂∂-∂∂-=)1,,)(,0,0(),0,0(22dxdy y x z y x R dxdy R dS n R U⎰⎰⎰⎰⎰⎰==)),(,,(),0,0(顶顶顶对于底面,则dxdy yZ x Z dS n )1,,(11-∂∂∂∂=dxdy y x z y x R dxdy R dS n R U⎰⎰⎰⎰⎰⎰=-=)),(,,(-),0,0(底底底对侧面,S3=0。
F 垂直于侧面。
综上所述,即证。
其他复杂情况分解为这种情况,即证。
******************************************************************************* 利用散度定理dVx dS n dS t Vjji sj ji si ⎰⎰⎰∂∂==ττ---------------------------------------------------------------------------------------------------------------------- 证明j ji i n t τ=设在面X1X2X3上,面积为S ;面OX1X2,OX2X3,OX1X3的面积为S1、S2、S3。
Sh V S n n e S S i i ∆∙=∆∆=∙∆=∆31),cos(受力分析:x 1x 3x 2i i j ji i a f S S t ∙∆=∆∙+∆∙-∆∙V V ρρτi i j ji i a S h S h f S n S t ∙∆∙=∆∙∙+∆-∆∙3131ρρτ0→h ,j ji i n t τ=物理意义:如果已知过点P 与三个坐标轴方向相垂直的三个面元上的九个应力分量ji τ,则过该点任意面元(法线方向n)上的应力向量i t 都可用这九个应力分量按此式表示出来。
柯西应力公式:在一点处三个与坐标轴方向相垂直的面元上的九个应力分量可以确定该点的应力。
---------------------------------------------------------------------------------------------------------------------- 由于F=ma ,即有dV t u dV t v dV dt dv dV dt dv dV v dt dVi V i Vi Vi V i ⎰⎰⎰⎰⎰∂∂=∂∂==22ρρρρρ由i F F F =+体面dV t u dV f dV x ViV i Vj ji⎰⎰⎰∂∂=+∂∂22ρρτ 去掉积分号22tu f x i i j ji∂∂=+∂∂ρρτ若弹性体处于静力平衡状态,a=0。
弹性体的平衡微分方程:0=+∂∂i jji f x ρτ应力张量的对称性该部分弹性体在时刻t 对坐标系原点o 的动量矩⎰⨯=VdV v x t Nρ)(在i e方向上的分量为dV v x e N k j Vijk i ρ⎰=作用在弹性体上的体力与面力的力矩⎰⎰⨯+⨯=VsdV f x dS t x t Mρ)(在i e方向上的分量为⎰⎰+=Vk j ijk k sj ijk i dV f x e dS t x e M ρ由i iM dtdN =,即dV v x e dt ddV f x e dS t x e k j Vijk Vk j ijk k sj ijk ρρ⎰⎰⎰=+ 运用散度定理:dV x x e dV x x e dVx x e dS n x e dS t x ellk j Vjk ijk l lk jVlk jl ijk Vllk j ijkl lk sj ijk k sj ijk][][)(∂∂+=∂∂+=∂∂==⎰⎰⎰⎰⎰ττττδττ对于dV t ux v v e dV dt dv x v v e dV dt v x d e dV v x e dt dk j j k Vijk k jj k Vijk k j V ijk k j Vijk ][][)(22∂∂+=+==⎰⎰⎰⎰ρρρρ因为0=j k ijk v v e ,j k ijk v v e 、与垂直。
dV t u x e dV v x e dt dk j V ijk k j Vijk 22∂∂=⎰⎰ρρ 所以,有dV t u x e dV f x e dV x x e k j Vijk V k j ijk l lk j V jk ijk 22][∂∂=+∂∂+⎰⎰⎰ρρττ 0][][2222=∂∂-+∂∂+=∂∂-+∂∂+⎰⎰⎰⎰⎰Vk k l lk j ijk Vjk ijk V k j V ijk k j ijk l lk j V jk ijk dV tuf x x e dV e dV t u x e dV f x e dV x x e ρρττρρττ因为0][22=∂∂-+∂∂⎰V kk l lk j ijk dV t u f x x e ρρτ,所以0=⎰dV e Vjk ijk τ。
所以0=jk ijk e τ于是, i=1, 03223=-ττ i=2, 01331=-ττ i=3, 01221=-ττ 即jk kj ττ=,这就是剪应力互等定理。
应力边界条件 j ji i n t τ=四面体的的表面元的外法线为n,外来作用面力为t,则弹性体的应力边界条件:j ji i n t τ=。
它表明了应力的边界值与边界面上的表面力的关系。
本构方程(应力--应变关系)ij ij ij e μλθδτ2+=证明:当应力小于比例极限时,应力与应变是成正比的。
将上面理论推广:线性弹性体内一点处的应力张量分量为该点应变张量分量的线性齐次函数,反之亦然。
即kl ijkl ij e C =τ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡333231232221131211333333323331332333223321331333123311323332323231322332223221321332123211313331323131312331223121311331123111233323322331232323222321231323122311223322322231222322222221221322122211213321322131212321222121211321122111133313321331132313221321131313121311123312321231122312221221121312121211113311321131112311221121111311121111333231232221131211e e e e e e e e e C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C C τττττττττ其中,ijkl C 称为弹性系数张量,它有81个分量,它们的值由所在点处材料的弹性性质决定。
如果弹性体不是均匀的,其弹性性质随点的不同而不同,即ijkl C 是点坐标i x 的函数。
如果弹性体是均匀的,弹性体内各点的弹性性质相同,即ijkl C 是与点坐标i x 无关的函数。