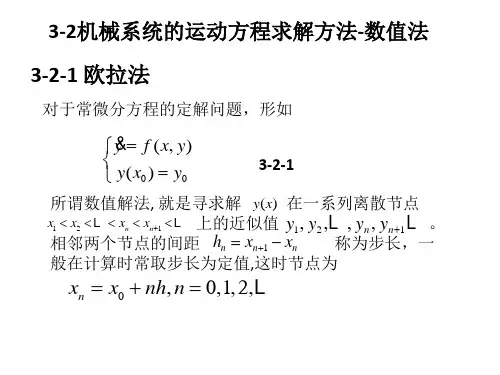
机械系统动力学 第三章 机械系统运动微分方程的求解1
- 格式:ppt
- 大小:4.59 MB
- 文档页数:68



![机械系统动力学第二章 机械系统运动微分方程的建立[精]](https://uimg.taocdn.com/84a3c92b10a6f524ccbf8578.webp)
V k COS:k mF e 八F kk =1V k COS kV《机械系统动力学》复习小结第一章绪论★ 1•《机械系统动力学》课程的脉络(主要内容、研究对象、研究方法)主要分为两部分:刚体动力学和机械振动学"单自由度刚体动力学:等效力学模型;刚体动力学Y二自由度刚体动力学:拉格朗日方程、龙格库塔法;-单自由度系统振动:单自由度无阻尼(有阻尼)自由振动(强迫振动)、固有频率计算、Duhamel积分;,两自由度系统振动:固有频率及主振型求解、动力减振器;机械振动学]多自由度系统振动:影响系数法、模态分析法、矩阵迭代法;弹性体振动:杆的纵向振动、轴的扭转振动、梁的横向自由振动(受迫振动)、W种边界条件下的频率方程;2.机械系统的一些基本概念系统、机械系统、离散系统、连续系统以及激励的确定性、随机性、模糊性。
3.机械振动的概念及其分类简谐振动:x = Asin「t亠"] 复数形式* x = Ae‘上★ 4.谐波分析法:把一个周期函数展开成一个傅立叶级数形式。
a 远F t ° 亠〔a* cosb n sin n t2 n 二★ 5.机械系统动力学的研究意义、研究任务、发展趋势第二章单自由度刚体系统动力学1.驱动力&工作阻力的分类机械特性的概念三相异步电动机的机械特性分析;输出力矩与角速度之间的关系:M = a b^ c 2。
★ 2 •等效力学模型原则:转化前后,等效构件与原系统的动能相等,等效力与外力所作的功相等。
通常取做定轴转动或直线平动的构件为等效构件。
Fourier 级数:- 22与传动速比有关,与机构的运动速度无关。
运动方程用动能定理确定。
1 21 2◎也E =W ―2J e2^—2Je32= ip Me d^2=P —J。
等+7器件〕皿等效构件运动方程的基本形式如p22例题1、p23例题2及课后思考题假设等效构件做匀速转动,即令• ’ =1, ; = 0 ;★ 4 .运动方程的求解方法1)等效力矩是等效构件转角的函数时运动方程的求解,即4W = ,M e2)等效转动惯量是常数,等效力矩是等效构件角速度函数时运动方程的求解J e= con st, M e= M e■:分离变量法一>dt = M e g严3)等效力矩是等效构件转角&角速度的函数时运动方程的求解,即Je = J e :欧拉法、龙格库塔法4)等效力矩是等效构件转角、角速度和时间的函数时运动方程的求解,即M e 二M e',t :3四阶龙格库塔法——►丿dtJ e m jj4 I -m j3. 等效转动惯量&等效转动惯量导数的计算2) 3)对机构进行运动分析,求出各构件对应的角速度和角加速度以及各构件质心的速度和加速度——出相应的传动速比及其导数;利用公式计算等效转动惯量&等效转动惯量导数:-Je =》m jj壬IA J jW丿j dJ en F=2L mi j V sj一兰i+J./ j sj d® j j d申丿1)数值积分方法(梯形法),即J j J j5.飞轮转动惯量的计算机械运转不均匀数:、:二 F 一min = 2 上匹'm ' max ' min通常用具有较大转动惯量的飞轮以减小机械运转时的周期性速度波动; 为什么飞轮具有储能作用?(飞轮调节作用的原理分析)第三章两自由度刚体系统动力学1.自由度、广义坐标、虚位移的定义2.虚位移原理在理想约束条件下,质点系平衡的充分必要条件是所有主动力在虚位移上所作的元功之和池二...F k、r k=0k3.广义力的计算★1)利用公式直接计算:Q j F k' kk 的2)利用求虚功的方法计算:令-q =0,其他(n- 1)个广义虚位移均等于零,则系统中所有主动力在相应虚位移上所作的虚功之和:W F^Q i q i对两自由度系统,W^ -Q-i q! Q2q2或P • Q2q2如p41例题13)利用虚功率的方法计算4.拉格朗日方程由达朗贝尔原理——►无(F k—m k r k=0 ——Q i =2 再—空dt l^i 丿cqi5.用拉格朗日方程建立运动微分方程的步骤1)选取广义坐标,判断系统的自由度数;2)计算系统的动能E3)计算广义力Q i ;得到运动微分方程组。
2-1若i x 为输入位移,o x 为输出位移, 试列写出下图所示机械系统的微分方程式,并求出传递函数。
2-2下图所示系统中电压1U 和位移1x 为系统输入量,电压2U 和位移2x 为输出量,k 为弹簧弹性系数,f 为阻尼器的阻尼系数,试分别列写图示系统的传递函数)()(12s U s U 和)()(12s X s X ,并将其写成典型环节相串联的形式。
2-3试求下图所示有源网络的传递函数。
2-4试用信号流图求出下图所示四端网络的传递函数)()()(12s U s U s G .2-5试绘制下图所示RC 回路的方块图,并根据方块图,并根据方块图写出传递函数)()(s U s U r c 。
2-6 试绘制下图所示电路的结构图,并求传递函数)()(12s U s U 。
2-7 给定一速度调节器的电路如图所示,试求U(s)与)(,)(0s U s U t 之间的关系式。
2-8 下图为由运算放大器组成的控制系统的模拟图,试求其闭环传递函数。
2-9 某RC 网络为下图所示,其中21U U 、分别为网络的输入量和输出量,试求:(1)画出网络相应的结构图(即函数方框图);(2)求传递函数)()(12S U S U (化成标准形式);(3)讨论元件2121,,,C C R R 参数选择是否响应网络的绝对稳定性。
2-10 本题包括以下内容:1.已知由试验得出的环节输出时间特性如下(题图(1)):(1)试确定各环节的传递函数.(2)试确定各环节在s 平面上的零点.极点分部.(3)试画出各环节的伯德(Bode)图.2.设有如下环节(题图(2)):已知: 54321,,,,R R R R R 各为电阻值, 210,,C C C 各为电容值。
(1)试确定各环节的输入与输出的关系。
(2)试画出该环节的结构图。
3.在题图(3)所示系统中,i x :输入位移,0x :输出位移,f:阻尼器的阻尼系数,21k k 、各为弹簧系数.且假定系统是集中参数系统,输出端的负载效应可乎略.试求出图中所示机械系统传递函数。