第06课 多自由度系统的运动方程
- 格式:ppt
- 大小:2.39 MB
- 文档页数:49



![[工学]6-多自由度振动_OK](https://uimg.taocdn.com/a33839296f1aff00bfd51e19.webp)

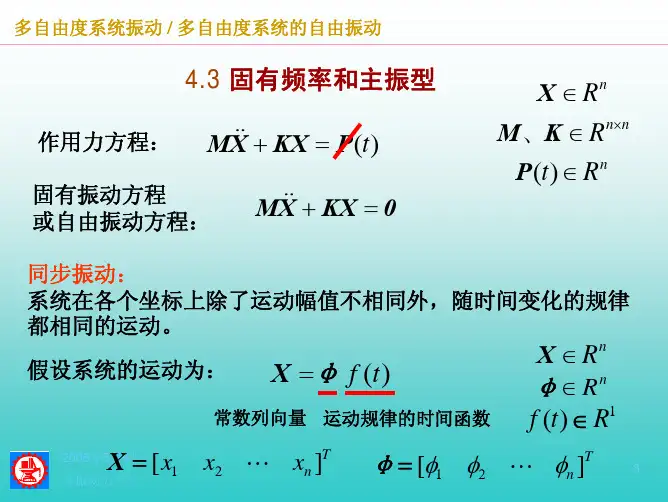
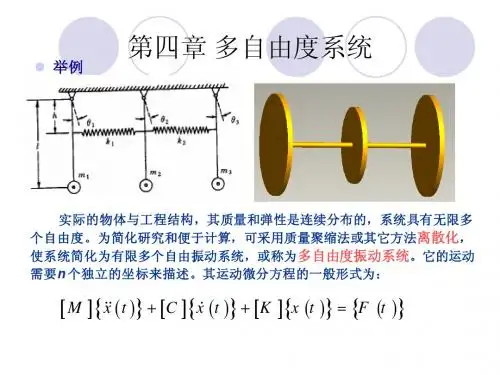
前述两自由度系统动力方程)(t P X K X M =+ (3.1) 若系统有 n 个自由度,则各项皆为 n 维矩阵或列向量。
上式中⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=nn nj n n j n j m m m m m m m m m .......................................122211111M 质量矩阵、⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=nn nj n n j n j k k k k k k k k k .......................................122211111K 刚度矩阵、 位移矩阵n T n R x x x ∈=],...,,[21X 和激励矩阵⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()()()(21t P t P t P t n P 。
方程(3.1)中当质量矩阵和刚度矩阵确定后,系统动力方程可完全确定。
M 、K 的确定(1)假设外力是以准静态方式施加于系统,加速度为零0=X,有)(t K P X =。
假设作用于系统的是这样一组外力:它们使系统只在第 j 个坐标上产生单位位移,而在其他各个坐标上不产生位移,即 :T T n j j j x x x x x ]0,...,0,1,0,...,0[],...,,,,...,[111==+-X 代入 :⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=nj j j nn nj n n j n j n k k k k k k k k k k k k t P t P t P t211222111112100100.......................................)()()()(P 所施加的这组外力数值上正是刚度矩阵 K 的第 j 列ij k 等于在第 i 个坐标上施加的力。
结论:刚度矩阵 K 中的元素ij k 是使系统仅在第 j 个坐标上产生单位位移而相应于第 i 个坐标上所需施加的力。