远程电话控制器的设计
- 格式:doc
- 大小:243.00 KB
- 文档页数:19

南京信息职业技术学院毕业设计论文作者薛亮学号*****T32 系部电子信息学院专业无线电技术题目基于单片机的家用电器远程遥控装置的设计与制作指导教师李光明评阅教师完成时间:2010年2月11日目录第1章绪论 (5)1.1 概述 (5)1.2 设计要求及主要功能介绍 (5)1.3 MCS-51系列单片机简介 (7)第2章系统总体设计 (9)2.1 系统功能模块的划分 (9)2.2 系统原理框图 (9)2.3 系统软件主要特色 (10)第3章各模块详细设计 (12)3.1 振铃检测模块的设计 (12)3.2 双音多频模块的设计 (13)3.3 自动摘机及超时挂机模块的设计 (16)3.4 语音提示模块的设计 (17)3.5 密码设置模块的设计 (21)3.6 EEPROM及看门狗模块的设计 (23)3.7 继电器驱动模块的设计 (27)3.8 系统总程序的设计 (28)第4章系统的组装、调试和测试 (30)4.1 系统的组装、调试 (30)4.2 振铃检测及自动摘机功能的测试 (30)4.3 语音及双音多频功能的测试 (30)4.4 密码设置功能的测试 (30)4.5 EEPROM密码存储功能的测试 (31)4.6 继电器驱动、电器状态显示及语音提示功能的测试 (31)4.7 超时自动挂机功能的测试 (31)第5章系统方案总评 (32)结论 (33)致谢 (33)参考文献 (33)附录A 家用电器远程遥控装置的功能及使用 (35)1 家用电器远程遥控装置的功能 (35)2 家用电器远程遥控装置的使用方法 (36)图1 家用电器远程遥控装置原理图 (38)图2 家用电器远程遥控装置印制板图 (39)图3 家用电器远程遥控装置CPLD内部电气图 (40)表1 家用电器远程遥控装置元器件清单 (41)第1章绪论1.1 概述单片机以其强大的控制能力已经被广泛应用于诸多领域,从最初的8位控制器到现在的16位、32位控制器都还有很大的发展和应用空间。

基于PLC的远程监控与控制系统设计引言现代工业领域中,远程监控与控制系统的设计与实施举足轻重。
随着技术的不断进步,工业自动化程度逐渐提高,企业对于能够远程监控与控制生产过程的系统需求也越来越迫切。
基于可编程逻辑控制器(PLC)的远程监控与控制系统成为工业界的主流选择之一。
本文旨在探讨基于PLC的远程监控与控制系统的设计原理、特点以及实现方法。
PLC的基本原理与特点PLC是一种特定用途的数字计算机,其核心是CPU、存储器、输入/输出(I/O)模块以及通信模块等。
PLC的工作原理为:根据预先设定的控制程序,通过输入模块采集外部信号,经过CPU处理后,再通过输出模块控制外部设备。
PLC具有以下特点:1. 高可靠性:PLC采用可靠的硬件结构和操作系统,能够适应各种恶劣工业环境,并且具备故障自诊断和容错能力。
2. 可扩展性:用户可以根据需要,通过添加不同类型的I/O模块或者通信模块,灵活扩展PLC的功能。
3. 强大的运算能力:PLC的处理速度快,具备多通道输入输出功能,能够处理复杂的控制逻辑。
远程监控与控制系统设计的目标与要求在工业生产中,远程监控与控制系统的设计目标是提高生产效率、减少人为错误、降低成本并确保安全。
因此,设计远程监控与控制系统需要满足以下要求:1. 实时性:远程监控与控制系统需要能够及时响应远程操作指令,并且将实时数据反馈给控制中心。
2. 稳定性:远程监控与控制系统需要稳定运行,不易受到外界干扰,保证生产过程的连续性和稳定性。
3. 安全性:远程监控与控制系统需要具备安全保护措施,防止非法访问、数据泄露以及黑客攻击。
PLC与远程监控与控制系统的结合基于PLC的远程监控与控制系统的设计是将传统的PLC系统与现代网络技术相结合,实现远程操作与监控。
其基本架构如下图所示:[插入一张图,展示基于PLC的远程监控与控制系统的基本架构]远程监控与控制系统的设计步骤设计基于PLC的远程监控与控制系统一般包括以下步骤:1. 系统需求分析:根据企业实际需求,确定远程监控与控制系统的功能和性能要求。

多功能电话远程控制器中文使用手册SPD多功能电话远程控制器中文使用手册目录5.8恢复初始设置08.............................5.7录音08.....................................5.6修改密码07.................................5.5查询输出状态075.4控制线路输出07.............................设置点动模式延时时间5.306......................5.206.............................设置输出模式5.1校验密码06.................................第五章控制操作06.................................4.2设置电话号码05.............................4.1设置振铃次数05.............................第四章初始设置05.................................3.3典型应用连接图04............................3.2安装步骤03.................................3.1接线端示意图03.............................第三章硬件安装03.................................第二章产品概述02.................................第一章用户手册简介.............................017.1为何输出状态会改变10.......................6.1为何不能电话报警10.........................第六章常见问题解答10.............................5.10解除拨号报警09.............................5.9设置报警动作09..........................................................感谢你购买SPD-M01多功能电话远程控制器!是专为中小企业及工矿场作为远程设备控制用。

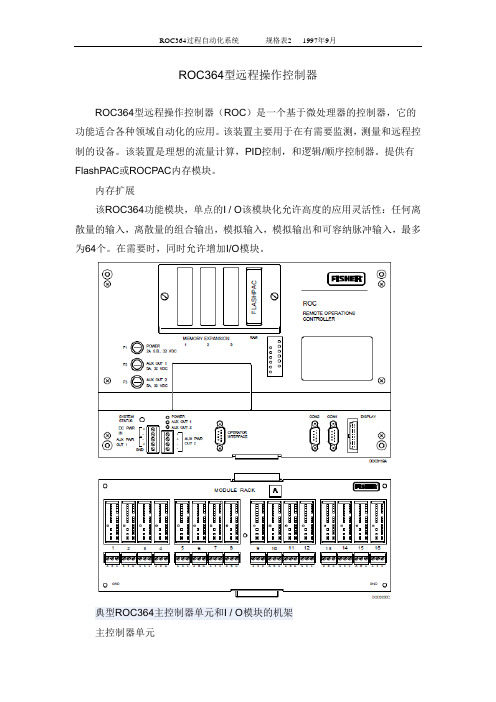
ROC364型远程操作控制器ROC364型远程操作控制器(ROC)是一个基于微处理器的控制器,它的功能适合各种领域自动化的应用。
该装置主要用于在有需要监测,测量和远程控制的设备。
该装置是理想的流量计算,PID控制,和逻辑/顺序控制器。
提供有FlashPAC或ROCPAC内存模块。
内存扩展该ROC364功能模块,单点的I / O该模块化允许高度的应用灵活性:任何离散量的输入,离散量的组合输出,模拟输入,模拟输出和可容纳脉冲输入,最多为64个。
在需要时,同时允许增加I/O模块。
典型ROC364主控制器单元和I / O模块的机架主控制器单元主控制器单元(MCU)是关键的组成部分,在ROC364和包括:◆NEC的V25 +板上微处理器时钟内存;◆板上内存;◆FlashPAC或ROCPAC模块;◆用于ROCPAC的内存扩展插槽只()◆连接的操作界面¨◆两卡可选的套接字通信¨◆·身份的投入指标和诊断有的单位对ROC与FlashPAC有一些额外的要求,如1992年美国AGA流量计算功能,包含在固件中。
见FlashPAC规格表(2:多功能一体机)获得更多信息。
NEC的V25 +是一个16位CMOS微处理器,可处理多达1兆字节的存储空间。
MCU的标准配备内建128千字节,电池供电,静态随机存取记忆体(静态存储器)存储数据和32千字节的电可擦除只读存储器(EEPROM)的存储配置参数。
该FlashPAC或ROCPAC模块包含操作系统,我国的通信协议,应用固件(见其他规格表)。
这两个模块为用户提供额外的RAM方案和历史记录,但是,FlashPAC有最大的内存,而内存为ROCPAC可以通过增加内存模块(详见在“选项”)。
操作界面端口提供了一个手段之间的直接联系和个人ROC364计算机。
随着计算机运行ROCLINK或GV101组态软件(见规格表4:RL101或2.3:GV101),用户可以配置ROC364并监督其运行。

一、实训背景随着信息技术的飞速发展,远程控制技术已成为现代工业、家庭等领域的重要技术之一。
为了提高同学们对远程控制技术的理解和实际操作能力,我们开展了本次远程控制器实训。
二、实训目的1. 了解远程控制器的原理和组成。
2. 掌握远程控制器的编程和调试方法。
3. 培养同学们的团队协作和实际操作能力。
三、实训内容1. 远程控制器原理本实训所使用的远程控制器是基于单片机核心控制器AT89S52进行设计的。
控制器主要由以下几个部分组成:- 单片机核心控制器:负责接收和处理远程控制信号,实现控制功能。
- DTMF信号解码电路:将电话按键发送的DTMF信号解码为数字信号,供单片机处理。
- 振铃检测电路:检测电话线路上的振铃信号,通知单片机进行相应处理。
- 语音提示电路:向用户提供语音提示信息。
- 家电控制电路:根据单片机的指令控制相应的家用电器。
2. 远程控制器编程本实训所使用的编程语言为C语言。
编程步骤如下:- 初始化单片机及各个功能模块。
- 编写DTMF信号解码程序。
- 编写振铃检测程序。
- 编写语音提示程序。
- 编写家电控制程序。
3. 远程控制器调试调试步骤如下:- 连接好各个功能模块,进行硬件联调。
- 编写测试程序,对各个功能模块进行测试。
- 调试程序,确保远程控制器正常运行。
四、实训过程1. 理论学习首先,我们学习了远程控制器的原理和组成,了解了各个功能模块的作用。
2. 硬件组装根据设计图纸,我们将各个功能模块组装在一起,完成了远程控制器的硬件搭建。
3. 编程使用C语言编写程序,实现远程控制器的各项功能。
4. 调试对远程控制器进行调试,确保其正常运行。
五、实训结果通过本次实训,我们成功实现了远程控制器的各项功能,包括:1. 接收电话按键发送的DTMF信号,解码为数字信号。
2. 检测电话线路上的振铃信号,通知单片机进行相应处理。
3. 播放语音提示信息,引导用户输入密码和发送指令。
4. 根据单片机的指令控制相应的家用电器。
第7章远程电话控制器的设计7.1功能要求远程电话控制器接入普通的电话线后,可以在外地任何地方用手机或座机通过拨号的方式,对连接到控制器的电器进行电源开关等操作。
要求拨号接通后先进行密码核对,三次密码错误或一定时间内没有操作则自动挂机。
7.2方案论证利用现有公用电话网实现电器设备的远程控制,无须改造线路,安装方便且成本较低,电话控制器并联于普通电话机的接线上,不会影响到正常电话机的使用,具有较好的应用价值。
远程电话控制系统主要包括了电话振铃检测电路、电话自动模拟摘挂机电路、双音多频DTMF(Dual Tone Multi-Frequency)信号解码电路、语音提示电路、驱动接口电路,以及单片机控制电路等。
图7.1为远程电话控制系统结构框架图,当通过异地的电话机拨通控制器所连接外线的电话号码时,通过市局电话交换机向用户电话机发出振铃信号,控制器中的振铃检测电路将检测到的振铃信号送到单片机控制器进行计数,如果控制器检测到振铃五次(可设定)后无人接听电话,则控制器自动模拟摘机,先与电话拨号者进行语音提示,要求遥控操作时先请输入密码,接着等待操作者输入密码并进行密码的校对。
DTMF解码芯片将用户输入的按键信号转换成相应的数字信号,由单片机进行密码的比对,密码输入正确后再通过语音提示,通过操作者数字键选择控制电器及对应的电源开关等,完成后语音提示挂机结束。
图7.1 远程电话控制器系统构成框图。
7.3 系统硬件电路的设计电话远程控制电路主要由电话振铃检测电路、自动模拟摘挂机电路、DTMF信号解码电路、语音提示电路、单片机控制电路、接口驱动电路和电源等组成。
控制器电路原理图如7.2。
U2管绿色图7.2 远程电话控制器电路原理图7.3.1 振铃检测电路当用户电话被呼叫时,电信局的电话交换机发出铃流信号,振铃信号为25±3Hz的正弦波,电压有效值90V左右,振铃重复周期为5秒, 1秒振铃,4秒间隙。
由于振铃信号电压比较高,输入时经电容隔离降压并经全桥整流后,输入至光耦4N35的输入端,从而使光耦输出端得到低电平信号,用以单片机对铃声信号的检测和响铃计数。
振铃检测电路原理图如图7.3。
C37.3.2模拟摘机电路电信局的程控电话交换机对电话摘机的响应是根据电话线回路电流变大。
当交换机检测到回路电流变大为30mA左右就认为电话机已经摘机。
在用户摘机(接电话)时,电话机内通过叉簧接上约200Ω左右的负载,使整个电话线回路流过约30mA的电流,交换机检测到该电流后便停止铃流发送,并将线路电压变为10伏左右的直流电,完成电话接通工作。
图7.4为模拟摘机电路的原理图。
当单片机发出摘机信号时(高电平),Q3晶体三极管导通,从而驱动功率管Q2也导通,模拟负载电阻R24被接入电话线两端,产生约30mA的电流,从而完成模拟摘机功能;当远程设定操作结束时,通过单片机发挂机信号(低电平),从而使Q3及Q2截止,电话线回路电流消失,电信局的程控交换机完成电话线路的切断工作。
DTMF解码图7.4 模拟摘机电路原理图7.3.3 DTMF解码电路DTMF双音多频信号解码电路是目前在按键电话、程控交换机等设备中广泛应用的电路。
DTMF发送器用于电话按键号的双音频信号发送,实现音频拨号。
双音多频信号是一组由高频信号与低频信号叠加而成的组合信号,电话机中使用的按键与双音多频信号的频率对应关系如表7.1所示。
表7.1 数字拨号键与对应的频率关系一般使用MITEL公司生产的MT8870作为DTMF信号的解码器件。
MT8870具有电路简单、功能强、功耗低、工作稳定可靠等优点,图7.5为MT8870解码电路原理图。
1图7.5 DTMF解码电路原理图当电话线上送来的双音多频信号经C3,送到MT8870的第2(IN-)引脚时,双音多频脉冲信号先经MT8870内部的拨号音滤波器,滤除拨号音信号,然后经前置放大后送入双音频滤波器,将双音频信号按高、低音频信号分开,再经高低通滤波器,幅度检测器后送入输出译码电路,经过数字运算后,在其数据输出端口(第11至14脚)输出相对应的二进制BCD 码。
MT8870的数据输出端D1—D4连到单片机P1口的P1.0—P1.3,单片机经P1口的低四位识别对应的按键号。
表7.1中的A、B、C、D键常被用作重拨、录放、免提等功能使用。
使用解码数据(D1—D4)时要注意,对于“0”键号,MT8870输出的二进制BCD码并非是“0000”,而是“1010”。
另外,“*”与“#”键的输出分别为“1011”和“1100”。
当MT8870新获取有效双音多频信号并解码成功后,其15引脚的电平由低变高,通知单片机可以取数据了, 第15引脚的高电平在延时一段时间后会自动恢复为低电平。
而无效的双音频信号或电话线路杂音、人的语音信号等是不会引起MT8870的数据解码的。
7.3.4 语音提示电路电话远程控制器系统利用语音提示电路实现用户和系统的交流。
语音提示电路预先存储若干段系统提示音,单片机程序根据用户发送的按键指令(DTMF信号),进行相应的控制操作并播放语音提示下一步的操作,而操作者则根据反馈的语音信息按需要进行按键操作。
ISD4002-120P 是美国ISD公司系列单片语音录放集成电路的一种,它采用直接模拟量存储技术,将每个采样值直接存储在片内的FLASH RAM中,能较好地保留模拟量中的有效成分。
语音芯片设计成和微处理器配合使用的寻址和控制方式,使器件引出端数减到最少,且音质较好,目前在语音合成设计中应用很广泛。
ISD4002-120P可录放120秒语音信号,最多可分600段录音,每一段均可寻址,其地址范围为000H—258H。
单片机通过模拟SPI接口向ISD4002发送上电、指定地址、开始录音、结束录音、按地址放音等操作命令,实现录音与放音操作。
电话远程控制器在使用前需要提前将要提示的语音信息按段录入到芯片上。
在录音操作时,通过麦克风将声音信号转化为电信号,并通过三极管Q8放大,耦合到语音信号的输入端(第16引脚),单端输入时一般信号幅度不要超过32mV 。
在放音操作时,从ISD4002第13脚输出的声音信号经运放LM386放大后,再经过隔直耦合器送到电话线上,提示音的大小可以通过R34进行调整。
4+3V图7.6 ISD4002语音提示电路原理图7.3.5 单片机控制电路单片机采用宏晶公司的STC89C52系列,具有6时钟运行模式,可比普通单片机速度提高一倍,内带的EEPROM 可用于密码数据的存储与修改,其主要引脚的使用如图7.7所示。
其中P1.0—P1.3端口用于双音频解码器输出数据的读入;P1.5口用于模拟摘机或挂机的控制操作;P1.6口输出遥控码(本实例中没有设计程序);P1.7、P3.0、P3.1、P3.3、P3.6、P2.6端口接LED 指示发光管;第9脚接上电复位电路;P3.2口接遥控器学习操作键(本实例中没有设计程序);P3.4脚接双音频解码器的15脚,用于测试是否有双音频解码数据完成输出;P3.5脚为遥控码学习状态下的红外接收头信号输入口;P2.0—P2.5用于控制按键; P2.7、P0.5、 P0.6、 P0.7口用于电器的电源开关控制。
P0.0—P0.4端口用于语音芯片ISD4002的录放音控制。
图7.7 单片机主控制器电路7.3.6 接口电路1、电器控制接口电路电器的控制采用继电器进行交流电源的开关控制,驱动电路用小功率三极管9013,继电器用5V 的直流小封装继电器,控制线圈上并上二极管用于消除反峰电压。
对于不能用简单电源进行控制的电器,要用红外遥控码进行操作,本设计实例电路图中进行了红外遥控电路的设计,但在程序中无红外线控制的内容。
图7.8为继电器驱动电路图。
器4图7.8 继电器驱动电路2、按键接口电路按键设计采用了最简单的顺序查键方法,六个按键使用了P2口的六根引脚线,程序中除使用了录音及放音测试键外,另四个备用。
图7.9 按键接口电路7.3.7 电源电路电源电路需要提供两组电压,单片机系统使用5V 电源,语音芯片及双音频解码芯片使用3V 电源。
设计中使用了三端稳压集成电路LM7805及LM317,外围电路简单,性能稳定,电路原理如图7.10。
图7.10 电源电路7.4 系统程序的设计电话远程控制器系统软件主要有以下模块:初始化子程序、 键盘扫描程序、振铃次数读入程序、 DTMF 解码信号读入程序、 密码比较程序、 错误次数计数及计时程序、语音录音、语音放音程序等等。
7.4.1录音程序录音程序用在远程电话控制器设计阶段,本次设计中共用了五段语音提示,每段语音时间约为5-10秒。
第一段内容为:“欢迎来到远程家电控制系统,请输入你的密码,以#键结束”,用在响铃5次后自动摘机时对操作者的提示。
第二段内容为:“对不起,你的密码输入有误,请重新输入密码,你有三次密码输入机会”,用在密码输入错误的时候。
第三段内容为“控制空调请按1、控制电扇请按2、控制电饭煲请按3、控制热水器请按4,结束请按*号键”,用于实时对远程的电器操作。
第四段内容为:“对不起,你的操作次数已到,系统将在10秒后自动挂机,再见”,用于密码输入三次错误时挂机提醒。
第五段内容为:“你好,你的输入控制已完成,请挂机,谢谢”,用于正常结束或1分钟无操作动作时的提醒。
设计中可根据需要录12段时长为10秒左右的语音提醒语句。
ISD4002芯片录音操作程序流程图如7.11。
图7.11 ISD4002录音程序流程 图7.12 ISD4002放音程序流程 7.4.2 放音程序放音程序用于远程自动电话操作过程中的语音提醒,不同的阶段情况要求播放对应内容的提示语音,在程序设计时要根据录音时的地址进行相应的控制并按录音的延时时间进行放音延时。
ISD4002放音程序流程图如图7.12。
7.4.3 双音频解码数据读码程序远程电话控制器在拨号响铃五次后进入自动摘机状态,先要求操作者进行密码校对,操作者使用电话机上的按键(0-9,*,#)输入5位密码,并以#号键作为结束标志,这些按键以双音频的模式传送后,被远程电话控制器中的解码芯片MT8870解码,当一个新的代表键号的四位数据解码成功后,其15引脚会出现一个高电平信号,表示有新的数据收到,单片机通过测试该端口判断是否要读入新的数据。
读码程序的流程图如图7.13。
图7.13 双音频解码数据读码程序流程图7.4.4 自动摘机处理程序图7.14为电话远程控制器自动摘机处理程序流程图。
在主程序循环中通过检测响铃的次数来自动摘机,摘机后先提示输入密码;在这里可输入三次密码的机会,然后提示控制操作的键号数字,当想结束操作时可输入“*”号键,如在1分钟内无按键操作,电话控制器也会在语音提示后自动挂机。