第五章 状态反馈控制器设计
- 格式:ppt
- 大小:1.50 MB
- 文档页数:41
第1篇一、实验背景在现代控制理论中,状态反馈是控制系统设计中的重要方法之一。
它通过将系统的状态信息反馈到控制输入,实现对系统动态特性的调节和优化。
本实验旨在通过MATLAB软件,验证状态反馈在控制系统设计中的应用,并分析其效果。
二、实验目的1. 理解状态反馈的原理和设计方法;2. 掌握状态反馈在控制系统中的应用;3. 分析状态反馈对系统性能的影响;4. 比较不同状态反馈策略的优劣。
三、实验内容1. 系统模型建立:根据实验要求,建立被控对象的传递函数模型。
2. 状态反馈设计:采用极点配置法,将闭环系统的极点配置在期望的位置上,实现状态反馈。
3. 仿真分析:通过MATLAB软件进行仿真实验,分析不同状态反馈策略对系统性能的影响。
4. 结果比较:比较不同状态反馈策略的优劣,总结实验结论。
四、实验步骤1. 系统模型建立:根据实验要求,建立被控对象的传递函数模型。
2. 状态反馈设计:根据极点配置法,确定闭环系统的极点位置,设计状态反馈控制器。
3. 仿真分析:在MATLAB软件中,搭建仿真模型,设置不同状态反馈策略,进行仿真实验。
4. 结果比较:分析仿真结果,比较不同状态反馈策略的优劣。
五、实验结果与分析1. 系统模型建立根据实验要求,建立被控对象的传递函数模型如下:G(s) = 1 / (s^2 + 2s + 2)2. 状态反馈设计采用极点配置法,将闭环系统的极点配置在期望的位置上,设计状态反馈控制器如下:K = [k1, k2]其中,k1和k2为待定系数。
通过求解以下方程组,确定k1和k2的值:(sI - A - BK)^-1B = C其中,A为系统矩阵,B为输入矩阵,C为输出矩阵,I为单位矩阵。
3. 仿真分析在MATLAB软件中,搭建仿真模型,设置不同状态反馈策略,进行仿真实验。
(1)无状态反馈将K置为零,观察系统响应。
(2)状态反馈根据上述设计的控制器,设置不同的k1和k2值,观察系统响应。
4. 结果比较通过仿真实验,比较不同状态反馈策略的优劣。
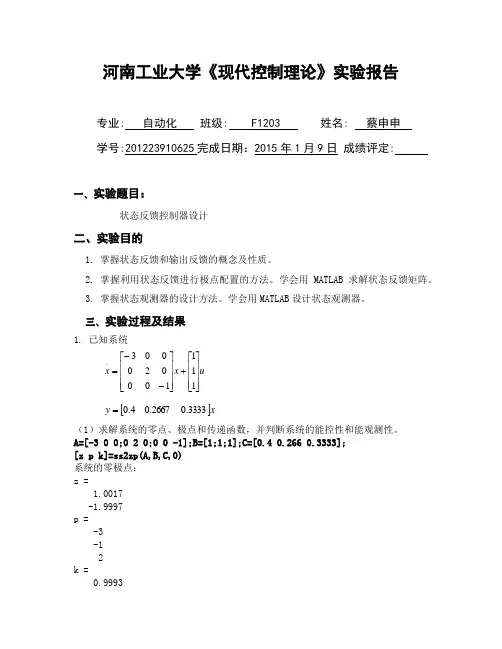
河南工业大学《现代控制理论》实验报告专业: 自动化 班级: F1203 姓名: 蔡申申 学号:201223910625完成日期:2015年1月9日 成绩评定:一、实验题目:状态反馈控制器设计二、实验目的1. 掌握状态反馈和输出反馈的概念及性质。
2. 掌握利用状态反馈进行极点配置的方法。
学会用MATLAB 求解状态反馈矩阵。
3. 掌握状态观测器的设计方法。
学会用MATLAB 设计状态观测器。
三、实验过程及结果1. 已知系统u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=111100020003.[]x y 3333.02667.04.0= (1)求解系统的零点、极点和传递函数,并判断系统的能控性和能观测性。
A=[-3 0 0;0 2 0;0 0 -1];B=[1;1;1];C=[0.4 0.266 0.3333];[z p k]=ss2zp(A,B,C,0)系统的零极点:z =1.0017-1.9997p =-3-12k =0.9993[num den]=ss2tf(A,B,C,0)num =0 0.9993 0.9973 -2.0018den =1 2 -5 -6系统的传递函数:G1=tf(num,den)G1 =0.9993 s^2 + 0.9973 s - 2.002-----------------------------s^3 + 2 s^2 - 5 s - 6Continuous-time transfer function.Uc=ctrb(A,B); rank(Uc)ans =3满秩,系统是能控的。
Vo=obsv(A,C); rank(Vo)ans =3满秩,系统是能观的。
(2)分别选取K=[0 3 0],K=[1 3 2],K=[0 16 /3 –1/3](实验中只选取其中一个K为例)为状态反馈矩阵,求解闭环系统的零点、极点和传递函数,判断闭环系统的能控性和能观测性。
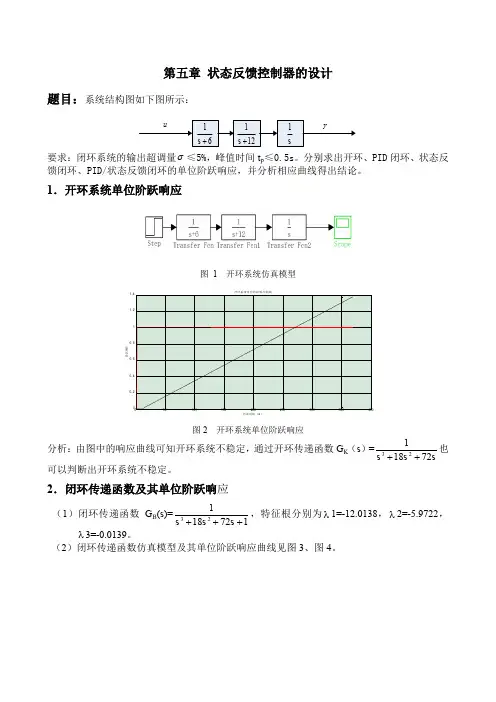
第五章 状态反馈控制器的设计题目:系统结构图如下图所示:要求:闭环系统的输出超调量σ≤5%,峰值时间t p ≤0.5s 。
分别求出开环、PID 闭环、状态反馈闭环、PID/状态反馈闭环的单位阶跃响应,并分析相应曲线得出结论。
1.开环系统单位阶跃响应图 1 开环系统仿真模型0.0.0.0.1.1.仿真时间(s )阶跃响应图2 开环系统单位阶跃响应分析:由图中的响应曲线可知开环系统不稳定,通过开环传递函数G K (s )=3211872s s s++也可以判断出开环系统不稳定。
2.闭环传递函数及其单位阶跃响应(1)闭环传递函数G B (s)=32118721s s s +++,特征根分别为λ1=-12.0138,λ2=-5.9722,λ3=-0.0139。
(2)闭环传递函数仿真模型及其单位阶跃响应曲线见图3、图4。
图3 闭环传递函数仿真模型图4 闭环传递函数单位阶跃响应分析:响应曲线表明,系统是稳定的,但是系统的响应时间太长,远达不到要求。
3.加入PID控制器,并进行参数整定后的单位阶跃响应图 5 PID控制仿真模型其中参数设置为:K p =256.8 ,K i =0.2,K d=23.2。
图6 PID 闭环控制输出波形图分析:通过Workspace 数据查询可知峰值时间tp=0.98686s ,最大输出值为1.0485,所以超调量为4.85%,满足要求,峰值时间达不到要求。
4.加入状态反馈控制器的单位阶跃响应图7 状态反馈控制仿真模型其中H1 到H3依次为10000、284.8、96.1。
0.0.0.0.1.-4t i m e(sec)O u t p u t图8 状态反馈控制单位阶跃响应分析:通过Workspace数据查询可知峰值时间tp=0.4492s,最大输出值为1.0449,所以超调量为4.49%,满足性能指标要求。
5.状态反馈/PID控制的单位阶跃响应图9 状态反馈/PID控制仿真模型其中PID参数设置为:K p =1.05 ,K i =0.01,K d=0;状态反馈控制H1 到H3依次为10000、284.8、96.1。
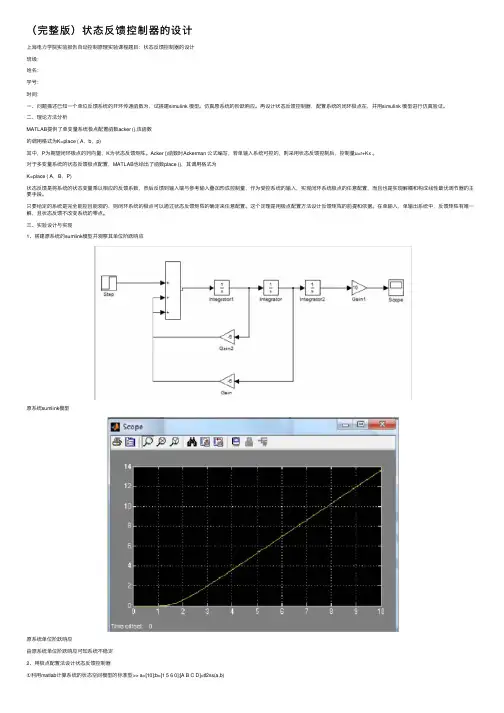
(完整版)状态反馈控制器的设计上海电⼒学院实验报告⾃动控制原理实验课程题⽬:状态反馈控制器的设计班级:姓名:学号:时间:⼀、问题描述已知⼀个单位反馈系统的开环传递函数为,试搭建simulink 模型。
仿真原系统的阶跃响应。
再设计状态反馈控制器,配置系统的闭环极点在,并⽤simulink 模型进⾏仿真验证。
⼆、理论⽅法分析MATLAB提供了单变量系统极点配置函数acker (),该函数的调⽤格式为K=place ( A,b,p)其中,P为期望闭环极点的列向量,K为状态反馈矩阵。
Acker ()函数时Ackerman 公式编写,若单输⼊系统可控的,则采⽤状态反馈控制后,控制量u=r+Kx 。
对于多变量系统的状态反馈极点配置,MATLAB也给出了函数place (),其调⽤格式为K=place ( A,B,P)状态反馈是将系统的状态变量乘以相应的反馈系数,然后反馈到输⼊端与参考输⼊叠加形成控制量,作为受控系统的输⼊,实现闭环系统极点的任意配置,⽽且也是实现解耦和构成线性最优调节器的主要⼿段。
只要给定的系统是完全能控且能观的,则闭环系统的极点可以通过状态反馈矩阵的确定来任意配置。
这个定理是⽤极点配置⽅法设计反馈矩阵的前提和依据。
在单输⼊,单输出系统中,反馈矩阵有唯⼀解,且状态反馈不改变系统的零点。
三、实验设计与实现1、搭建原系统的sumlink模型并观察其单位阶跃响应原系统sumlink模型原系统单位阶跃响应由原系统单位阶跃响应可知系统不稳定2、⽤极点配置法设计状态反馈控制器①利⽤matlab计算系统的状态空间模型的标准型>> a=[10];b=[1 5 6 0];[A B C D]=tf2ss(a,b)A = -5 -6 01 0 00 1 0B = 1C = 0 0 10③系统能控性矩阵>> uc=ctrb(A,B)uc = 1 -5 190 1 -50 0 1 >> rank(uc) ans = 3 所以系统完全能控③系统能观型矩阵>> vo=obsv(A,C) vo = 0 0 100 10 010 0 0 >> rank(vo) ans = 3 所以系统完全能观所以可以⽤极点配置法设计状态反馈控制器④求解系统反馈矩阵>> p=[-3 -0.5+j -0.5-j];k=acker(A,B,p)k = -1.0000 -1.7500 3.7500 加⼊反馈后的系统闭环极点为:>>sysnew=ss(A-B*k,B,C,D);pole(sysnew)ans = -3.0000-0.5000 + 1.0000i-0.5000 - 1.0000i⑤搭建加⼊反馈控制器后系统的sumlink模型⑥观察新系统的单位阶跃响应四、实验结果分析加⼊反馈控制器后系统的闭环极点在,符合题⽬要求。
现代控制实验状态反馈器和状态观测器的设计现代控制实验中,状态反馈器和状态观测器是设计系统的重要组成部分。
状态反馈器通过测量系统的状态变量,并利用反馈回路将状态变量与控制输入进行耦合,以优化系统的性能指标。
状态观测器则根据系统的输出信息,估计系统的状态变量,以便实时监测系统状态。
本文将分别介绍状态反馈器和状态观测器的设计原理和方法。
一、状态反馈器的设计:状态反馈器的设计目标是通过调整反馈增益矩阵,使得系统的状态变量在给定的性能要求下,达到所需的一组期望值。
其设计步骤如下:1.系统建模:通过对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
通常表示为:ẋ=Ax+Buy=Cx+Du其中,x为系统状态向量,u为控制输入向量,y为系统输出向量,A、B、C、D为系统的状态矩阵。
2.控制器设计:根据系统的动态性能要求,选择一个适当的闭环极点位置,并计算出一个合适的增益矩阵。
常用的设计方法有极点配置法、最优控制法等。
3.状态反馈器设计:根据控制器设计得到的增益矩阵,利用反馈回路将状态变量与控制输入进行耦合。
状态反馈器的输出为:u=-Kx其中,K为状态反馈增益矩阵。
4.性能评估与调整:通过仿真或实验,评估系统的性能表现,并根据需要对状态反馈器的增益矩阵进行调整。
二、状态观测器的设计:状态观测器的设计目标是根据系统的输出信息,通过一个状态估计器,实时估计系统的状态变量。
其设计步骤如下:1.系统建模:同样地,对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
2.观测器设计:根据系统的动态性能要求,选择一个合适的观测器极点位置,以及一个合适的观测器增益矩阵。
常用的设计方法有极点配置法、最优观测器法等。
3.状态估计:根据观测器设计得到的增益矩阵,通过观测器估计系统的状态变量。
状态观测器的输出为:x^=L(y-Cx^)其中,L为观测器增益矩阵,x^为状态估计向量。
4.性能评估与调整:通过仿真或实验,评估系统的状态估计精度,并根据需要对观测器的增益矩阵进行调整。

第5章 状态反馈控制器设计教材【1】:《现代控制理论》,俞立编著. 清华大学出版社,2007年4月主要参考书:【2】《现代控制理论简明教程》,许世范等,中国矿业大学出版社,1996年1月第1版;【3】《现代控制理论与工程》,东南大学 王积伟 高等教育出版社,2003年2月第1版,研究生教学用书。
作业:158157P P -习题5.3,5.4,5.5,5.6,5.8,5.9,5.12,5.13控制方式有“开环控制”和“闭环控制”两种。
“开环控制”就是把一个确定的信号(时间的函数)加到系统输入端,使系统具有某种目标性能。
然而,由于建模中的不确定性或误差、系统运行过程中的扰动等因素使系统产生一些意想不到的情况,这就要求对这些偏差进行及时修正,这就是“反馈控制”。
在经典控制理论中,依据描述控制对象输入输出行为的传递函数模型来设计控制器,因此只能采用输出反馈,即用系统输出作为反馈信号,而在现代控制理论中,则主要通过更为广泛的状态反馈对系统进行综合。
状态反馈综合的功能与特点:① 状态反馈可以改变和控制系统的极点位置,从而使闭环系统具有目标动态特性。
② 利用状态反馈构成的调节器,可以实现各种目的,使闭环系统满足设计要求。
③ 通过状态反馈的极点配置,例如可以使闭环系统的超调量%5≤p σ,峰值时间(超调时间)s t p 5.0≤,阻尼振荡频率10≤d ω等,(参见138P 例5.3.3)。
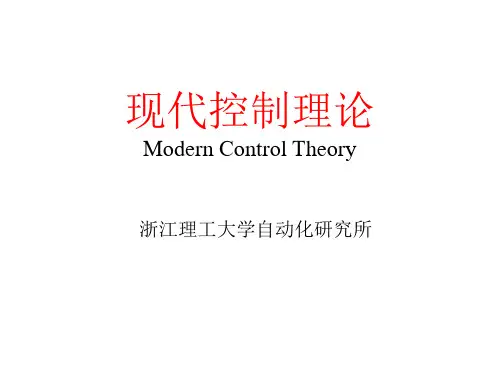
5.1 线性反馈控制系统的结构与性质设系统),,(C B A S =为 Cx y Bu Ax x=+=, (5-1)经典控制中采用输出)(t y (和输出导数)(t y )反馈(图5-1):其控制规律为:v Fy u +-=,~F m p ⨯,v 为参考输入 (5-2) 图5-1 经典控制-输出反馈闭环系统Bv x BFC A v Fy B Ax Bu Ax x +-=+-+=+=)()(可见,在经典控制中,引入输出反馈,相当于把系统矩阵A 变为 BFC A A F -=,因此通过选择F ,利用输出反馈Fy -可以适当改善系统的动态性能。
状态反馈控制器的设计状态反馈控制器是一种常见的控制器设计方法,用于调节系统的动态响应和稳定性。
它通过测量系统的输出和状态,并将这些信息与期望输出进行比较,来计算出控制器的控制输入。
接下来,我将介绍状态反馈控制器的基本原理、设计步骤和两个常见的设计方法。
状态反馈控制器的基本原理是基于系统的状态反馈,即通过系统的状态变量来进行控制。
在状态反馈控制器的设计中,首先需要确定系统的状态方程或状态空间表达式。
状态方程描述了系统的状态变化关系,通常使用微分方程或差分方程表示。
状态空间表达式则是将系统的状态方程转换为矩阵形式,以便于计算和分析。
设计一个状态反馈控制器包括以下步骤:1.系统建模:首先需要建立系统的数学模型,确定系统的输入、输出和状态变量。
这可以通过物理建模、数学建模或实验数据分析等方法来完成。
系统的模型可以是连续时间模型,也可以是离散时间模型。
2.系统稳定性分析:通过分析系统的特征值或极点,判断系统的稳定性。
如果系统的特征值都位于单位圆内或实部小于零,则系统是稳定的。
3.设计目标确定:根据系统的性能要求和目标,确定设计的指标,例如系统的快速响应、稳定性、误差补偿等。
4.控制器设计:根据系统的状态方程和控制目标,使用控制理论和方法,设计控制器的增益矩阵。
常用的设计方法有极点配置法和最优控制方法。
5.系统闭环仿真:将设计好的控制器与系统模型相连,进行闭环仿真,检验系统在不同工况和干扰下的响应性能。
可以通过调整控制器的参数来优化系统的性能。
接下来,我将介绍两种常见的状态反馈控制器设计方法:极点配置法和最优控制方法。
1.极点配置法:该方法通过选择恰当的状态反馈增益矩阵,使系统的极点移动到预定位置。
首先需要确定期望的系统极点位置,然后使用反馈增益矩阵的公式进行计算和调整。
极点配置法的优点是设计简单,但对系统的模型和性能要求较高。
2.最优控制方法:该方法是基于最优控制理论,对系统的控制性能进行优化设计。
最优控制方法通常需要确定一个性能指标,例如系统的能量消耗、误差最小化等,然后使用最优化算法来计算最优的控制器增益矩阵。

第5章状态反馈控制器设计第5章是关于状态反馈控制器设计的,状态反馈控制器是一种常用的控制器设计方法。
它基于系统的状态变量来设计控制器的反馈信号,以达到控制系统的稳定性、性能和鲁棒性要求。
在状态反馈控制器设计中,首先需要确定系统的状态方程,也就是描述系统动态特性的微分方程。
然后,根据系统的状态方程,可以得到系统的状态变量的表达式。
状态变量是可以直接测量或估计的物理量,如位置、速度、加速度等。
接下来,需要设计控制器的反馈信号的表达式。
为了保证控制系统的稳定性,通常选择线性组合的形式,即反馈信号是状态变量的线性组合。
选择合适的线性组合方式可以使得控制系统的响应更快、稳态误差更小。
常用的状态反馈控制器设计方法有两种:全局状态反馈和局部状态反馈。
全局状态反馈是指控制器的反馈信号包含所有的状态变量,可以使得控制系统的稳定性得到保证。
局部状态反馈是指控制器的反馈信号只包含部分的状态变量,可以使得控制系统的性能得到提升。
在设计状态反馈控制器时,需要满足以下几个步骤:1.系统模型化:将系统的动态特性表达为状态空间模型。
状态空间模型可以用矩阵形式表示,包括状态方程、输出方程和初始条件。
2.系统可控性分析:通过计算系统的可控性矩阵来判断系统是否是可控的。
如果可控性矩阵的秩等于系统的状态变量的个数,则系统是可控的,可以设计状态反馈控制器。
3.控制器设计:选择合适的反馈信号的线性组合方式,设计控制器的反馈矩阵。
反馈矩阵的选择会影响到控制系统的稳定性、性能和鲁棒性。
通常,可以使用经验法则、优化算法或者现代控制理论来进行设计。
4.控制器实现:将控制器的反馈信号与系统的输出信号进行比较,计算出控制器的输出信号。
根据控制器的输出信号来调节系统的输入信号,以实现对系统状态的控制。
最后,需要对设计出的状态反馈控制器进行仿真验证和实验测试。
通过仿真和实验可以评估控制系统的性能,并对控制器进行进一步的改进和优化。
总结起来,状态反馈控制器是一种基于系统状态变量的控制器设计方法。
线性时不变系统的状态反馈控制器设计前言前面一篇博客介绍了基于状态空间模型的系统分析。
本篇博客将针对线性时不变系统,基于状态空间模型并根据系统的性能要求来设计控制系统。
一个系统的控制方式有开环控制和闭环控制。
开环控制指的是把一个确定的控制信号(关于时间的函数)加到系统的输入端,使得系统具有其中一种期望的性能,如稳定的跟踪一些参考输入或者使系统的状态达到一些特定值,等等。
上一篇博客讲的系统的能控性就是利用了开环控制,即存在一个特定的控制作用(开环控制)使得系统在有限时间内,从初始状态转移到零状态。
然而,由于建模存在的不确定性或误差、系统运行过程中的扰动等因素,使得我们没办法获得实际物理系统的真实动态方程,我们能得到的仅仅是粗略的低阶的名义模型或有时又称标称模型。
因此在对实际系统的控制过程中,若不能根据系统当前的运行状况及时修改系统的行为,而仍按照名义模型设计的开环控制作用会使得实际系统产生一些意想不到的情况,很难使实际物理系统按我们原先所期望的方式运行。
因此,我们必须根据系统的运行状况实时地来确定控制信号而不是采用预先设计好的控制信号,这就是反馈控制(feedback control)。
在经典控制理论中,我们依据描述对象输入输出行为的传递函数模型来设计控制器,因此只能用系统的可测量输出作为反馈信号。
而现代控制理论则是用刻画系统内部特征的状态空间模型来描述对象,出了可测量的输出信号外,还可以用系统的内部状态来作为反馈信号。
根据可利用的信息是系统的输出还是状态,相应的反馈控制可分为输出反馈和状态反馈。
本篇博客以状态空间模型描述的线性时不变系统为研究对象,介绍状态反馈控制器的一些设计方法。
首先介绍反馈控制的种类、结构及其对系统性能的影响。
进而介绍改善系统动态性能的极点配置方法,提出极点配置状态反馈控制律的设计算法。
针对极点配置方法可能影响系统稳态性能的问题,介绍了实现精确跟踪的控制系统设计方法。
线性反馈控制系统控制系统结构控制系统由被控对象和控制器(controller)两部分组成。