现代控制理论8_状态观测器
- 格式:pdf
- 大小:212.63 KB
- 文档页数:5


现代控制实验状态反馈器和状态观测器的设计现代控制实验中,状态反馈器和状态观测器是设计系统的重要组成部分。
状态反馈器通过测量系统的状态变量,并利用反馈回路将状态变量与控制输入进行耦合,以优化系统的性能指标。
状态观测器则根据系统的输出信息,估计系统的状态变量,以便实时监测系统状态。
本文将分别介绍状态反馈器和状态观测器的设计原理和方法。
一、状态反馈器的设计:状态反馈器的设计目标是通过调整反馈增益矩阵,使得系统的状态变量在给定的性能要求下,达到所需的一组期望值。
其设计步骤如下:1.系统建模:通过对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
通常表示为:ẋ=Ax+Buy=Cx+Du其中,x为系统状态向量,u为控制输入向量,y为系统输出向量,A、B、C、D为系统的状态矩阵。
2.控制器设计:根据系统的动态性能要求,选择一个适当的闭环极点位置,并计算出一个合适的增益矩阵。
常用的设计方法有极点配置法、最优控制法等。
3.状态反馈器设计:根据控制器设计得到的增益矩阵,利用反馈回路将状态变量与控制输入进行耦合。
状态反馈器的输出为:u=-Kx其中,K为状态反馈增益矩阵。
4.性能评估与调整:通过仿真或实验,评估系统的性能表现,并根据需要对状态反馈器的增益矩阵进行调整。
二、状态观测器的设计:状态观测器的设计目标是根据系统的输出信息,通过一个状态估计器,实时估计系统的状态变量。
其设计步骤如下:1.系统建模:同样地,对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
2.观测器设计:根据系统的动态性能要求,选择一个合适的观测器极点位置,以及一个合适的观测器增益矩阵。
常用的设计方法有极点配置法、最优观测器法等。
3.状态估计:根据观测器设计得到的增益矩阵,通过观测器估计系统的状态变量。
状态观测器的输出为:x^=L(y-Cx^)其中,L为观测器增益矩阵,x^为状态估计向量。
4.性能评估与调整:通过仿真或实验,评估系统的状态估计精度,并根据需要对观测器的增益矩阵进行调整。

实验八 状态反馈与状态观测器的工程应用一、实验目的1、对一个实际系统,建立该系统的数学模型,了解模型线性化的方法,最终获得 系统的状态空间描述,并对系统进行稳定性,能控性,能观性检查。
2、根据控制要求,采用极点配置方法设计状态反馈控制器,并利用全维状态观测 器来实现状态反馈。
二、实验要求1、 对实验系统进行稳定性,能控性及能观性检查2、 用状态反馈方法使起重机系统按期望速度到达B 点3、 全维状态观测器的设计4、 观测器的引入对闭环系统的影响三、实验内容为研究起重机的防摆控制问题,需对实际问题进行简化、抽象。
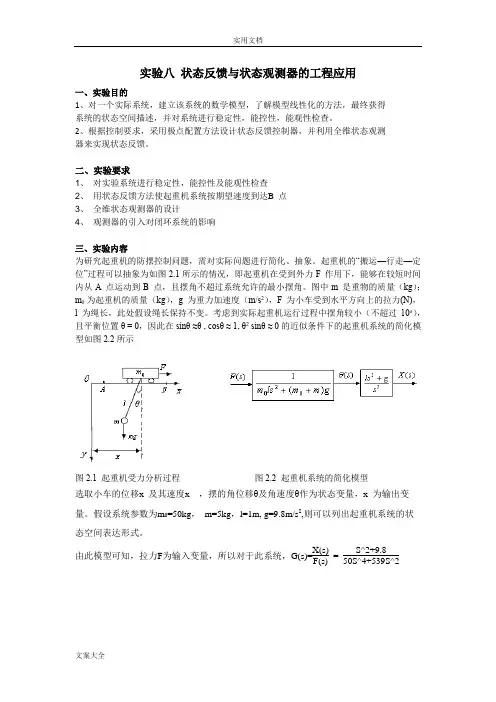
起重机的“搬运—行走—定位”过程可以抽象为如图2.1所示的情况,即起重机在受到外力F 作用下,能够在较短时间内从A 点运动到B 点,且摆角不超过系统允许的最小摆角。
图中m 是重物的质量(kg ); m 0为起重机的质量(kg ),g 为重力加速度(m/s 2),F 为小车受到水平方向上的拉力(N),l 为绳长,此处假设绳长保持不变。
考虑到实际起重机运行过程中摆角较小(不超过10o ),且平衡位置θ = 0,因此在sinθ ≈θ , cosθ ≈ 1, θ2 si nθ ≈ 0的近似条件下的起重机系统的简化模型如图2.2所示图2.1 起重机受力分析过程 图2.2 起重机系统的简化模型选取小车的位移x 及其速度x ,摆的角位移θ及角速度θ作为状态变量,x 为输出变量。
假设系统参数为m 0=50kg , m=5kg ,l=1m, g=9.8m/s 2,则可以列出起重机系统的状态空间表达形式。
由此模型可知,拉力F 为输入变量,所以对于此系统,G(s)=X(s)F(s) = S^2+9.850S^4+539S^2利用MatLab可从传递函数中由G(S)求出状态方程的A,B,C,D >> num=[0 1 0 9.8]; den=[50 0 539 0 0]den =50 0 539 0 0>> [A,B,C,D]=tf2ss(num,den)A =0 -10.7800 0 01.0000 0 0 00 1.0000 0 00 0 1.0000 0B =1C =0 0.0200 0 0.1960D =(1)判断系统稳定性建立m文件,命名为Untiled2,程序:lambda=eig(A);for i=1:length(lambda)if lambda(i)>=0disp('The system is unstable');returnendenddisp('The system is stable');运行结果为:>> Untitled2The system is unstable所以这个系统是不稳定的。
自动控制原理状态观测器知识点总结自动控制原理状态观测器是自动控制系统中的重要组成部分,用于实时地获取、估计和观测系统的状态信息。
在控制系统中,状态观测器的设计和性能直接影响系统的响应速度、稳定性和精度。
本文将对自动控制原理中的状态观测器进行知识点总结。
一、状态观测器的基本概念在自动控制系统中,状态观测器的主要作用是通过利用系统的输出信号来估计系统的状态变量,从而实现对系统状态的观测和监测。
状态观测器的设计目标是在系统的输出信号和已知的输入信号的基础上,使用数学模型来估计未知的状态变量。
二、状态观测器的数学模型状态观测器的数学模型通常由状态方程和输出方程组成。
状态方程描述了系统状态的动态变化规律,而输出方程描述了系统输出与状态之间的关系。
通过状态方程和输出方程,可以得到一个关于状态变量的估计值,从而实现对系统状态的观测。
三、状态观测器的设计原则1. 可观测性:系统的状态观测器设计需要满足可观测性的要求,即系统的状态变量可以通过系统的输出信号来观测和估计。
如果系统是可观测的,那么可以设计一个状态观测器来实现对系统状态的观测和估计。
2. 稳定性:状态观测器设计需要保证系统的稳定性,即系统的状态估计值与实际状态之间的差距趋于稳定。
稳定的状态观测器可以确保系统的控制效果和性能。
3. 收敛速度:状态观测器的设计需要考虑观测误差的收敛速度,即状态观测器对系统状态的估计速度。
较快的收敛速度可以更准确地估计系统的状态,提高控制系统的响应速度和精度。
四、常见的状态观测器算法1. 卡尔曼滤波器:卡尔曼滤波器是一种最优的状态观测器算法,适用于线性离散系统和线性连续系统。
卡尔曼滤波器通过递推方式对系统的状态进行估计,具有较好的稳定性和收敛速度。
2. 扩展卡尔曼滤波器:扩展卡尔曼滤波器是对非线性系统进行状态观测的一种方法。
它通过使用线性化的状态方程和输出方程,结合卡尔曼滤波器的思想进行状态估计。
3. 粒子滤波器:粒子滤波器是一种基于蒙特卡罗方法的非线性状态观测器算法。
现代控制理论HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】1、什么是对偶系统,从传递函数矩阵,特征多项式和能控、能观性说明互为对偶的两个系统之间的关系。
答:定义:如果两个系统满足A2=A1T,B2=C1T,C2=B1T,则称这两个系统互为对偶函数。
互为对偶系统传递函数矩阵互为转置特征多项式相同,一个函数的能控性等价于另一个函数的能观性。
2、什么是状态观测器?简述构造状态观测器的原则。
答:系统的状态不易检测,以原系统的输入和输出为输入量构造,一动态系统,使其输出渐近于原系统状态,此动态系统为原系统的状态观测器。
原则:(1)观测器应以原系统的输入和输出为输入量;(2)原系统完全能观或不能观于系统是渐近稳定的;(3)观测器的输出状态应以足够快速度超近于原系统状态;(4)有尽可能低的维数,以便于物理实现。
3、说明应用李氏第二法判断非线性系统稳定性基本思想和方法步骤和局限性。
答:基本思想:从能量观点分析平衡状态的稳定性。
(1)如果系统受扰后,其运动总是伴随能量的减少,当达到平衡状态时,能量达到最小值,则此平衡状态渐近稳定:(2)如果系统不断从外界吸收能量,储能越来越大,那么这个平衡状态就是不稳定的:(3)如果系统的储能既不增加也不消耗,那么这个平衡状态时李亚普诺夫意义下的稳定。
方法步骤:定义一个正定的标量函数V(x)作为虚构的广义能量函数,然后根据V(x)=dV(x)/dt的符号特征来判别系统的稳定性。
局限性:李雅普诺夫函数V(x)的选取需要一定的经验和技巧。
4、举例说明系统状态稳定和输出稳定的关系。
答:关系:(1)状态稳定一定输出稳定,但输出稳定不一定状态稳定;(2)系统状态完全能观且能控=状态稳定与输出稳定等价。
举例:A的特征值 =-1 =1 所以状态不是渐进稳点的,W(s)的极点S=-1,所以输出稳点。
5、什么是实现问题什么是最小实现说明实现存在的条件。
《现代控制理论》线性定常系统的反馈结构及状态观测器现代控制理论中,线性定常系统的反馈结构及状态观测器是控制系统中的关键部分。
反馈结构和状态观测器的设计对于控制系统的性能和稳定性有着重要的影响。
本文将从反馈结构和状态观测器的定义、功能和设计方法等方面进行详细介绍。
首先,我们来介绍反馈结构。
反馈结构是控制系统中最常见的一种控制方式,通过将系统的输出信号与期望值进行比较,计算出控制量,并作为输入信号对系统进行控制,以实现对系统输出的调节。
在线性定常系统中,反馈结构一般由比例控制器、积分控制器和微分控制器组成,通过调节这些控制器的参数,可以实现对系统性能的优化。
其中,比例控制器用于调节系统的过渡过程,积分控制器用于消除系统的稳态误差,微分控制器用于抑制系统的振荡和提高系统的动态响应速度。
通过适当选择和调节这些控制器的参数,可以使系统的性能指标如超调量、响应时间等得到满足。
接下来我们来介绍状态观测器。
状态观测器是用于估计和反馈系统状态的一种装置,通过测量系统的输出信号和输入信号,以及系统的数学模型,来估计系统的状态。
状态观测器在控制系统中起到了关键的作用,可以实现对系统状态的估计和补偿,从而提高系统的稳定性和性能。
在线性定常系统中,状态观测器一般由状态估计器和状态补偿器组成。
状态估计器根据系统的输出信号和输入信号,以及系统的数学模型,通过运算得到系统的状态估计值,以反馈给系统进行控制。
状态补偿器则根据系统的状态估计值和期望值,以及系统的数学模型,通过运算得到控制量,以控制系统的输出。
关于反馈结构和状态观测器的设计方法,一般可以采用经典控制理论方法和现代控制理论方法。
经典控制理论方法主要包括根轨迹法、频率响应法等。
根轨迹法可以通过绘制系统的根轨迹图来分析系统的稳定性和性能,并通过调节控制器参数来满足系统的性能指标。
频率响应法则通过分析系统的频率特性来设计合适的频率补偿器,以达到系统的优化。
现代控制理论方法则主要包括状态空间法和最优控制方法。
现代控制理论状态反馈和状态观测器的设计实验报告本次实验是关于现代控制理论中状态反馈与状态观测器的设计与实现。
本次实验采用MATLAB进行模拟与仿真,并通过实验数据进行验证。
一、实验目的1、学习状态反馈控制的概念、设计方法及其在实际工程中的应用。
3、掌握MATLAB软件的使用方法。
二、实验原理1、状态反馈控制状态反馈控制是指将系统状态作为反馈控制的输出,通过对状态反馈控制器参数的设计,使系统的状态响应满足一定的性能指标。
状态反馈控制的设计步骤如下:(1) 确定系统的状态方程,即确定系统的状态矢量、状态方程矩阵和输出矩阵;(2) 设计状态反馈控制器的反馈矩阵,即确定反馈增益矩阵K;(3) 检验状态反馈控制器性能是否满足要求。
2、状态观测器(1) 确定系统的状态方程;(2) 设计观测器的状态估计矩阵和输出矩阵;(3) 检验观测器的状态估计精度是否符合标准。
三、实验内容将简谐信号加入单个质点振动系统,并对状态反馈控制器和状态观测器进行设计与实现。
具体实验步骤如下:1、建立系统状态方程:(1)根据系统的物理特性可得单自由度振动系统的运动方程为:m¨+kx=0(2)考虑到系统存在误差、干扰等因素,引入干扰项,得到系统状态方程:(3)得到系统状态方程为:(1)观察系统状态方程,可以发现系统状态量只存在于 m 行 m 到 m 行 n 之间,而控制量只存在于 m 行 1 到 m 行 n 之间,满足可控性条件。
(2)本次实验并未给出状态变量的全部信息,只给出了系统的一维输出,因此需要设计状态反馈器。
(3)我们采用极点配置法进行状态反馈器设计。
采用 MATLAB 工具箱函数,计算出极点:(4) 根据极点求解反馈矩阵,得到状态反馈增益矩阵K:(1)通过矩阵计算得到系统的可观性矩阵:(2)由若干个实测输出建立观测器,可将观测器矩阵与可观测性矩阵组合成 Hankel 矩阵,求解出状态观测器系数矩阵:(3)根据系统的状态方程和输出方程,设计观测方程和状态估计方程,如下:4、调试控制器和观测器(1)经过上述设计步骤,将反馈矩阵和观测矩阵带入 MATLAB 工具箱函数进行仿真。